- Организация ввода вывода. Лекция 5

Содержание
- 2. Типовая структура микропроцессорной системы Все устройства микропроцессорной системы объединяются общей системной шиной (она же называется еще
- 3. Шина адреса – служит для определения адреса (номера устройства) с которым микропроцессор обменивается в данный момент
- 4. Физическое представление сигналов Положительная логика 2. Отрицательная логика Немультиплексированная шина Средний уровень обозначает, что состояние сигналов
- 5. Самые главные сигналы на ШУ это стробы обмена. Строб обмена формируется микропроцессором и определяет момент времени
- 6. Типы обменов: 1. Синхронный обмен. Микропроцессор заканчивает обмен данными самостоятельно, через раз и навсегда установленный временной
- 7. 2. Асинхронный обмен. Микропроцессор начинает и заканчивает обмен только тогда, когда устройство исполнитель подтвердит свою готовность
- 8. Назначение параллельного порта Параллельные порты предназначены для обмена информацией микропроцессора с внешними устройствами, при этом в
- 9. Выходной каскад с открытым коллектором Элементы с ОК используются для: Расширения логических возможностей базового набора элементов.
- 10. Выходные каскады логических элементов Двухтактный (сложный) выходной каскад Опасное объединение выходных каскадов логических элементов ТТЛ Сложный
- 11. Выходной каскад с третьим состоянием (Z–состоянием) Z–состояние необходимо когда выходы нескольких логических элементов подключены к одной
- 12. Чтобы получить состояние Z достаточно закрыть оба выходных транзистора логического элемента. Входы Е1 и Е2 могут
- 13. Порт ввода Рис. 1. Структурная схема порта ввода В качестве порта ввода может быть использована схема
- 14. Порта вывода Рис. 2. Структурная схема порта вывода. В качестве порта вывода может быть использован параллельный
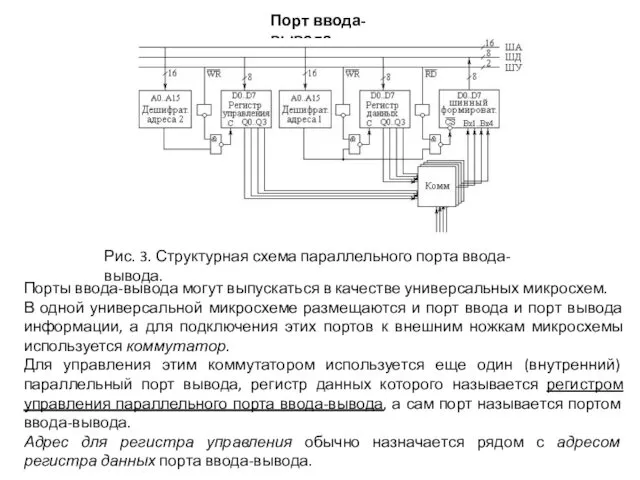
- 15. Порт ввода-вывода Рис. 3. Структурная схема параллельного порта ввода-вывода. Порты ввода-вывода могут выпускаться в качестве универсальных
- 16. Каждый порт микроконтроллеров состоит из определенного числа выводов, через которые микроконтроллер может осуществлять прием и передачу
- 17. Особенности порта ввода-вывода (I/O) AVR Порты ввода/вывода AVR имеют: от 3 до 53 независимых линий "вход/выход".
- 18. Обращение к портам производится через регистры ввода/вывода. Под каждый порт в адресном пространстве ввода/вывода зарезервировано по
- 19. DDRx – регистр направления порта. Порт в конкретный момент времени может быть либо входом либо выходом
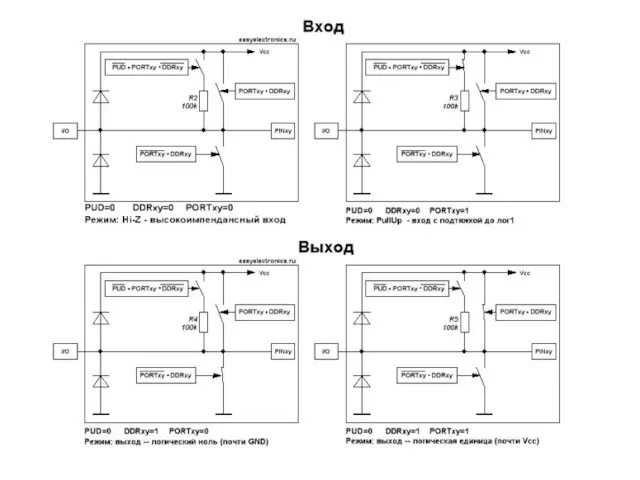
- 20. Рис. 4. Структурная схема параллельного порта ввода-вывода MC AVR.
- 21. Регистры управления подтяжкой в SFIOR (а) или в MCUCR (б) Конфигурации выводов портов бит PUD (PullUp
- 23. Состояние вывода микроконтроллера (независимо от установок бита DDxn) может быть получено путем чтения бита PINxn регистра
- 25. Скачать презентацию
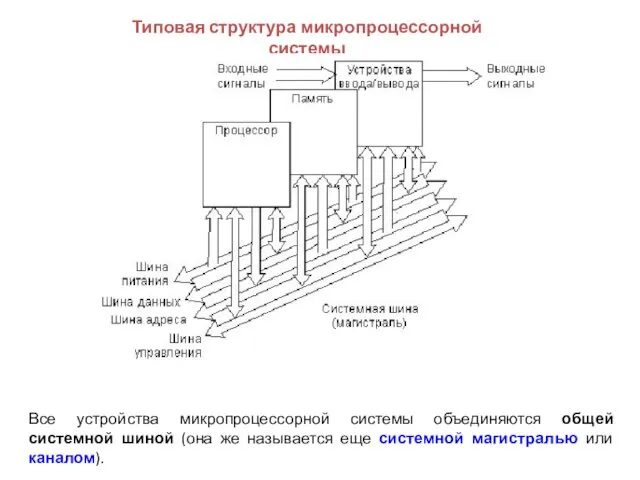
Типовая структура микропроцессорной системы
Все устройства микропроцессорной системы объединяются общей системной
Типовая структура микропроцессорной системы
Все устройства микропроцессорной системы объединяются общей системной
Шина адреса – служит для определения адреса (номера устройства) с которым
Шина адреса – служит для определения адреса (номера устройства) с которым
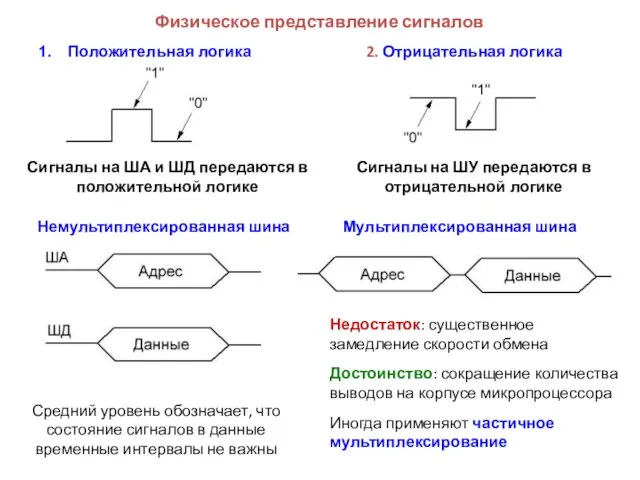
Физическое представление сигналов
Положительная логика
2. Отрицательная логика
Немультиплексированная шина
Средний уровень обозначает, что состояние
Физическое представление сигналов
Положительная логика
2. Отрицательная логика
Немультиплексированная шина
Средний уровень обозначает, что состояние
Самые главные сигналы на ШУ это стробы обмена.
Строб обмена формируется микропроцессором
Самые главные сигналы на ШУ это стробы обмена.
Строб обмена формируется микропроцессором
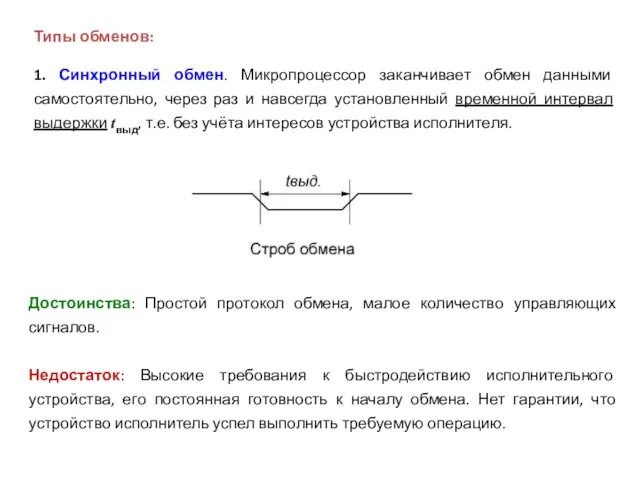
Типы обменов:
1. Синхронный обмен. Микропроцессор заканчивает обмен данными самостоятельно, через раз
Типы обменов:
1. Синхронный обмен. Микропроцессор заканчивает обмен данными самостоятельно, через раз
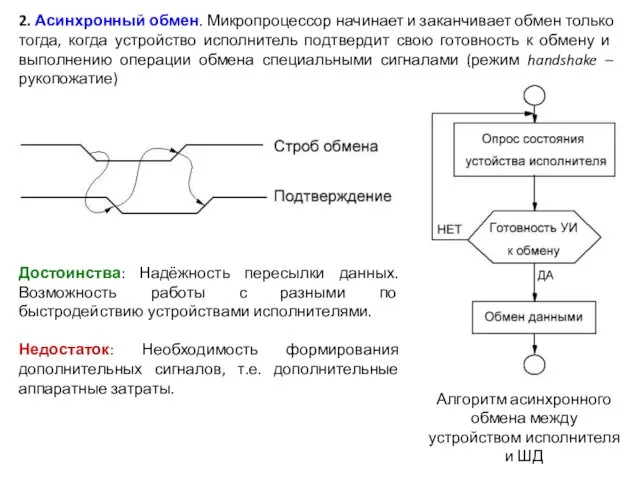
2. Асинхронный обмен. Микропроцессор начинает и заканчивает обмен только тогда, когда
2. Асинхронный обмен. Микропроцессор начинает и заканчивает обмен только тогда, когда
Назначение параллельного порта
Параллельные порты предназначены для обмена информацией микропроцессора с внешними
Назначение параллельного порта
Параллельные порты предназначены для обмена информацией микропроцессора с внешними
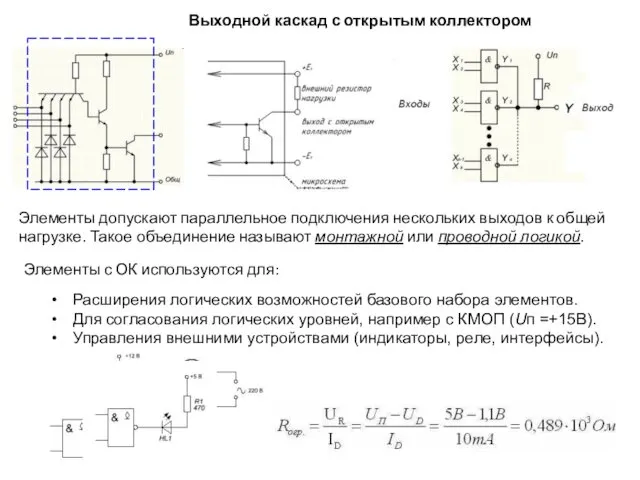
Выходной каскад с открытым коллектором
Элементы с ОК используются для:
Расширения логических возможностей
Выходной каскад с открытым коллектором
Элементы с ОК используются для:
Расширения логических возможностей
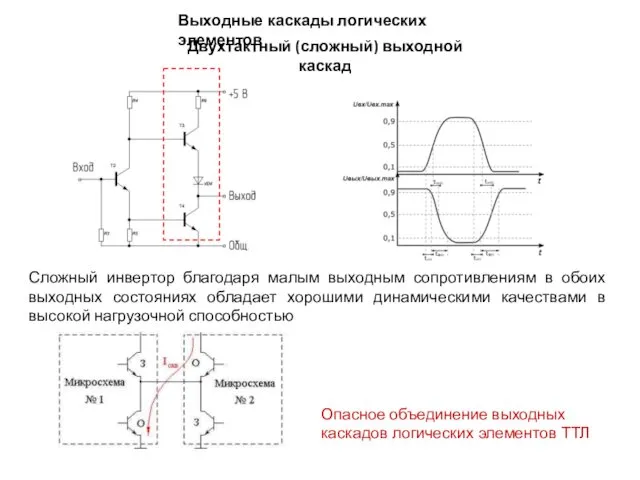
Выходные каскады логических элементов
Двухтактный (сложный) выходной каскад
Опасное объединение выходных каскадов
Выходные каскады логических элементов
Двухтактный (сложный) выходной каскад
Опасное объединение выходных каскадов

Выходной каскад с третьим состоянием (Z–состоянием)
Z–состояние необходимо когда выходы нескольких логических
Выходной каскад с третьим состоянием (Z–состоянием)
Z–состояние необходимо когда выходы нескольких логических
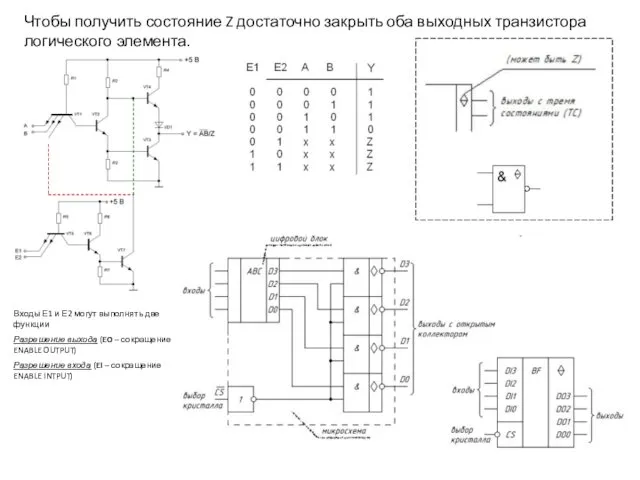
Чтобы получить состояние Z достаточно закрыть оба выходных транзистора логического элемента.
Входы
Чтобы получить состояние Z достаточно закрыть оба выходных транзистора логического элемента.
Входы
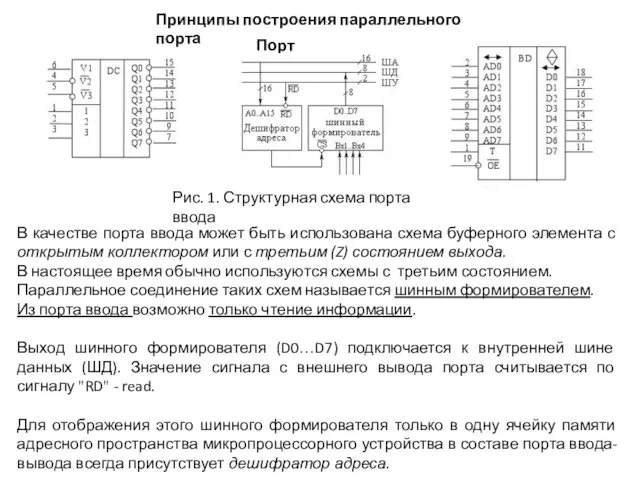
Порт ввода
Рис. 1. Структурная схема порта ввода
В качестве порта ввода может
Порт ввода
Рис. 1. Структурная схема порта ввода
В качестве порта ввода может
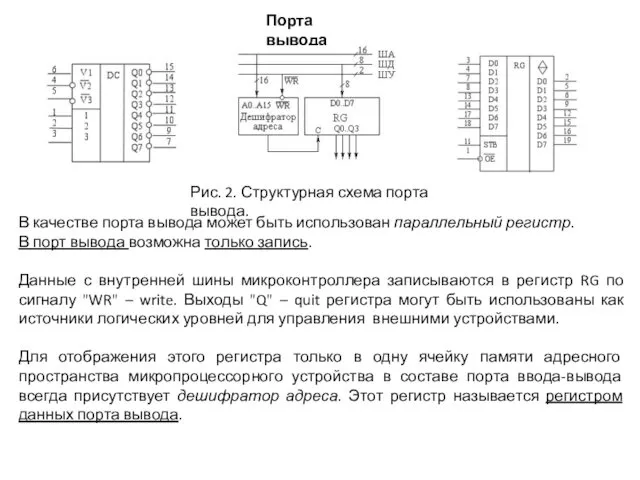
Порта вывода
Рис. 2. Структурная схема порта вывода.
В качестве порта вывода может
Порта вывода
Рис. 2. Структурная схема порта вывода.
В качестве порта вывода может
Порт ввода-вывода
Рис. 3. Структурная схема параллельного порта ввода-вывода.
Порты ввода-вывода могут выпускаться
Порт ввода-вывода
Рис. 3. Структурная схема параллельного порта ввода-вывода.
Порты ввода-вывода могут выпускаться
Каждый порт микроконтроллеров состоит из определенного числа выводов, через которые микроконтроллер
Каждый порт микроконтроллеров состоит из определенного числа выводов, через которые микроконтроллер
Особенности порта ввода-вывода (I/O) AVR
Порты ввода/вывода AVR имеют:
от 3
Особенности порта ввода-вывода (I/O) AVR
Порты ввода/вывода AVR имеют:
от 3
Обращение к портам производится через регистры ввода/вывода.
Под каждый порт в
Обращение к портам производится через регистры ввода/вывода.
Под каждый порт в
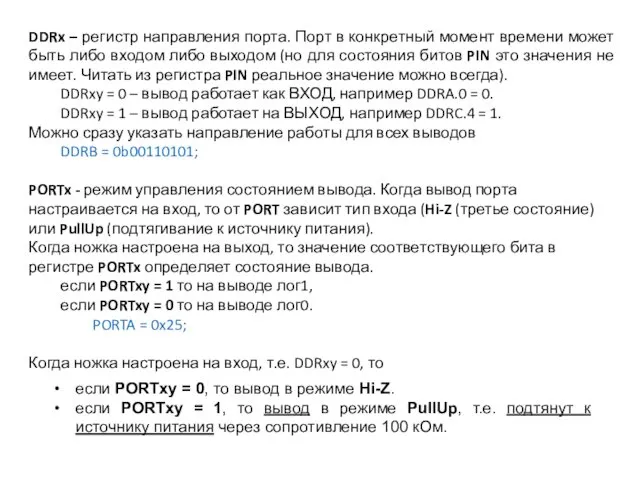
DDRx – регистр направления порта. Порт в конкретный момент времени может
DDRx – регистр направления порта. Порт в конкретный момент времени может

Рис. 4. Структурная схема параллельного порта ввода-вывода MC AVR.
Рис. 4. Структурная схема параллельного порта ввода-вывода MC AVR.
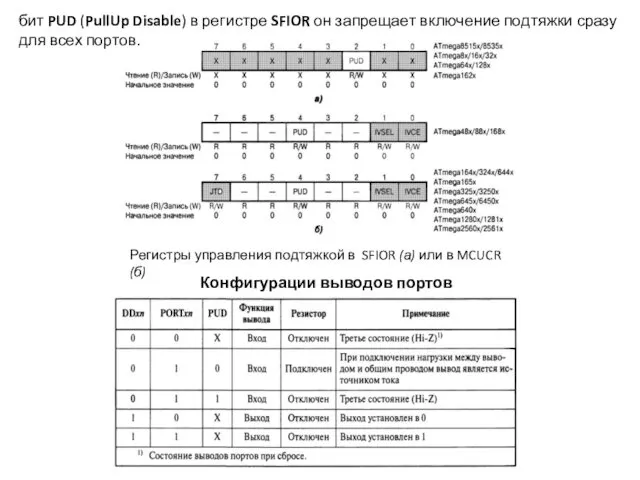
Регистры управления подтяжкой в SFIOR (а) или в MCUCR (б)
Конфигурации выводов
Регистры управления подтяжкой в SFIOR (а) или в MCUCR (б)
Конфигурации выводов
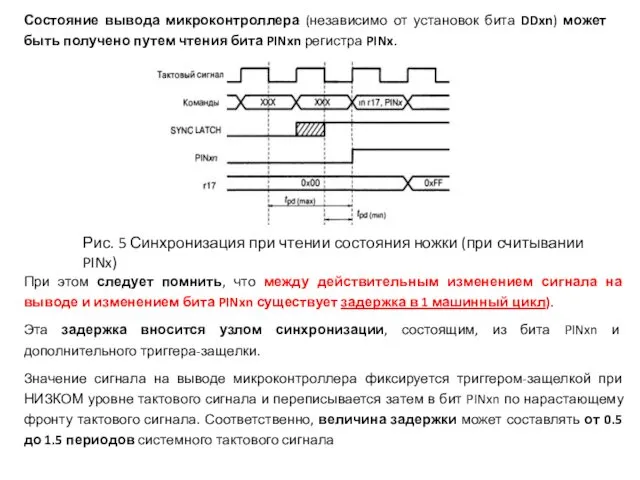
Состояние вывода микроконтроллера (независимо от установок бита DDxn) может быть получено
Состояние вывода микроконтроллера (независимо от установок бита DDxn) может быть получено
 Антиоксидантный комплекс витаминов Новомин. Сибирское здоровье
Антиоксидантный комплекс витаминов Новомин. Сибирское здоровье День летних и осенних именинников
День летних и осенних именинников Полы промышленных зданий
Полы промышленных зданий Жил человек... христианские притчи.
Жил человек... христианские притчи. Проблемы ИТВ. Кратко о плагиатах телеканалов и о плохих каналах
Проблемы ИТВ. Кратко о плагиатах телеканалов и о плохих каналах Оценка уровня обслуживания в магазинах Колеса даром
Оценка уровня обслуживания в магазинах Колеса даром Развитие страхования жизни в ООО Альянс жизнь
Развитие страхования жизни в ООО Альянс жизнь Обзор распространенных причин, препятствующих осуществлению государственного кадастрового учета
Обзор распространенных причин, препятствующих осуществлению государственного кадастрового учета Диагностика метапредметных результатов обучения
Диагностика метапредметных результатов обучения Кофе и кофейные напитки
Кофе и кофейные напитки Гипотиреоз
Гипотиреоз Неорганические (минеральные) воздушные вяжущие вещества
Неорганические (минеральные) воздушные вяжущие вещества Жизнь и творчество Ван Гога
Жизнь и творчество Ван Гога Физические и механические свойства древесины. 6 класс
Физические и механические свойства древесины. 6 класс Теория + пратика = ? Размышления, рассуждения, выводы
Теория + пратика = ? Размышления, рассуждения, выводы Проблемное обучение на уроке математики
Проблемное обучение на уроке математики Проект бурения скважины на Верхне-Ветлянском месторождении с выбором мероприятий по борьбе с поглощениями бурового раствора
Проект бурения скважины на Верхне-Ветлянском месторождении с выбором мероприятий по борьбе с поглощениями бурового раствора Сестринский уход при различных заболеваниях и состояниях
Сестринский уход при различных заболеваниях и состояниях Учебный тренажёр и проверочный тест по теме: Члены предложения
Учебный тренажёр и проверочный тест по теме: Члены предложения Презентация урока-исследования Байкал-уникальное творение природы
Презентация урока-исследования Байкал-уникальное творение природы Презентация1 апреля
Презентация1 апреля Толерантность - путь к культуре мира.
Толерантность - путь к культуре мира. Введение в предмет Алгебра логики
Введение в предмет Алгебра логики Презентация к классному часу в 7 классе по теме Кижи
Презентация к классному часу в 7 классе по теме Кижи Тіс-жақ аймағының аурулары, асқазан ішек жолдарында эррозиялы ойық-жаралы зақымдануға алып келетін факторлар
Тіс-жақ аймағының аурулары, асқазан ішек жолдарында эррозиялы ойық-жаралы зақымдануға алып келетін факторлар Регистрирующее устройство
Регистрирующее устройство Единый всекубанский классный час Год культуры - история Кубани в лицах, 4 класс
Единый всекубанский классный час Год культуры - история Кубани в лицах, 4 класс Отчёт-презентация на тему:Социально-личностное развитие дошкольников
Отчёт-презентация на тему:Социально-личностное развитие дошкольников