- Основные понятия теории механизмов и машин

Содержание
- 2. Вращательные кинематические пары. Вращательные кинематические пары обеспечивают только вращательное относительное движение Винт Корпус Колесо Болт Звено
- 3. Поступательные кинематические пары Поступательные кинематические пары обеспечивают только поступательное относительное движение Ползун Направляющая
- 4. Высшие кинематические пары Высшими называются кинематические пары в которых соприкосновение звеньев в сочленении происходит по линии
- 5. Классификация кинематических пар
- 6. Кинематические цепи. Последовательное соединение звеньев кинематическими парами называется кинематической цепью Разомкнутые кинематические цепи Замкнутые кинематические цепи
- 7. Понятие о механизме Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном. Замкнутая кинематическая цепь Механизм
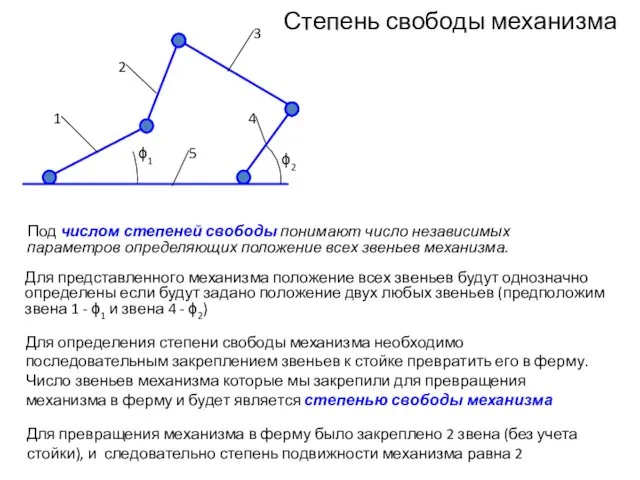
- 8. Под числом степеней свободы понимают число независимых параметров определяющих положение всех звеньев механизма. Для определения степени
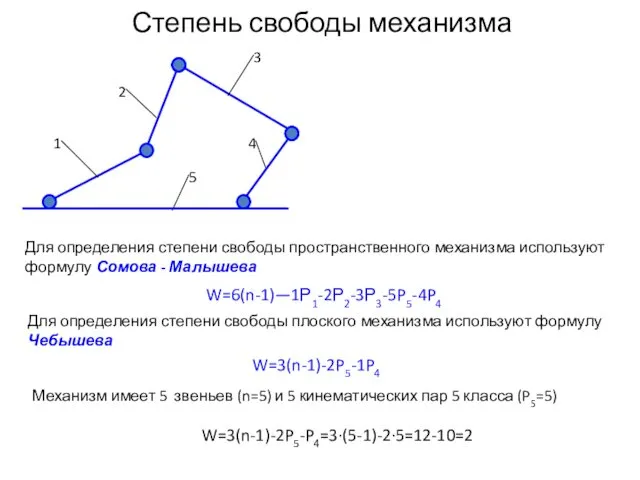
- 9. Степень свободы механизма Для определения степени свободы плоского механизма используют формулу Чебышева W=3(n-1)-2P5-1P4 Механизм имеет 5
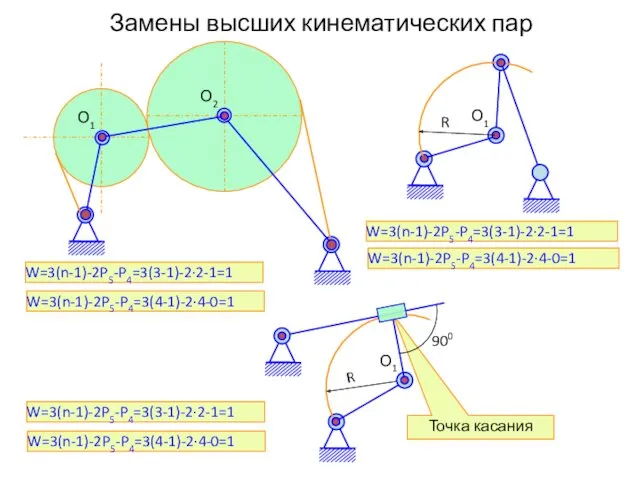
- 10. Точка касания Замены высших кинематических пар W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1 W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1 W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1 W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1 W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1 W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
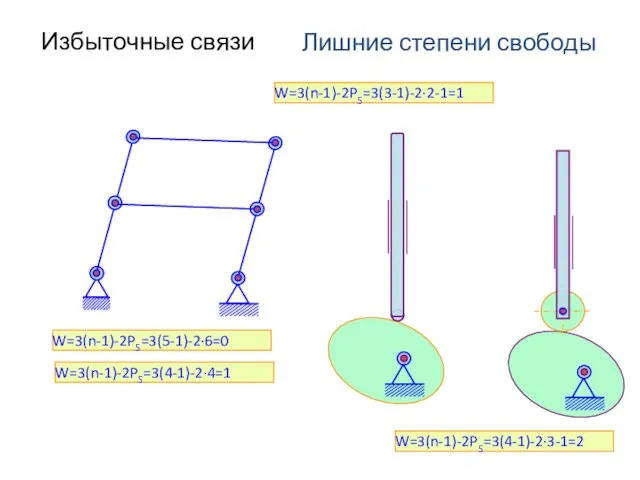
- 11. Избыточные связи W=3(n-1)-2P5=3(5-1)-2·6=0 W=3(n-1)-2P5=3(4-1)-2·4=1 W=3(n-1)-2P5=3(3-1)-2·2-1=1 W=3(n-1)-2P5=3(4-1)-2·3-1=2 Лишние степени свободы
- 12. Образование механизма по Л.В. Ассуру Большинство механизмов в технике имеют одну степень подвижности W=1. Как получить
- 13. Образование механизма по Л.В. Ассуру Рассмотрим выполняется ли для нее условие кинематической группы W=3n – 2p5=3·2
- 14. Классификация кинематических групп Группа 3 класса 3 порядка Группа 3 класса 4 порядка Группа 4 класса
- 15. Классификация механизмов Класс и порядок механизма определяется наивысшим классом и порядком кинематической группы входящей в данный
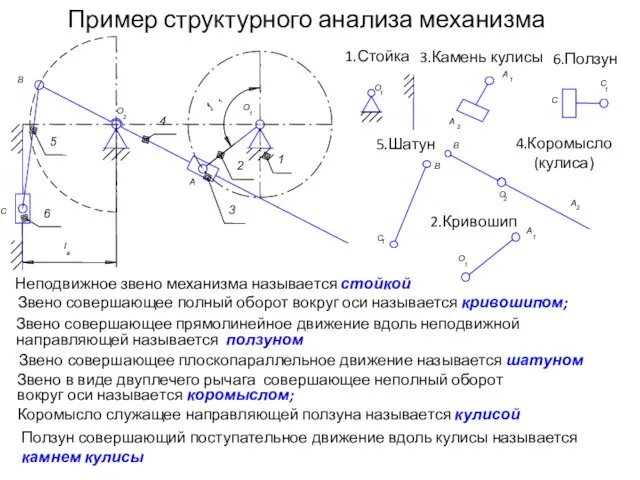
- 16. Пример структурного анализа механизма Звено совершающее плоскопараллельное движение называется шатуном Звено совершающее полный оборот вокруг оси
- 18. Скачать презентацию
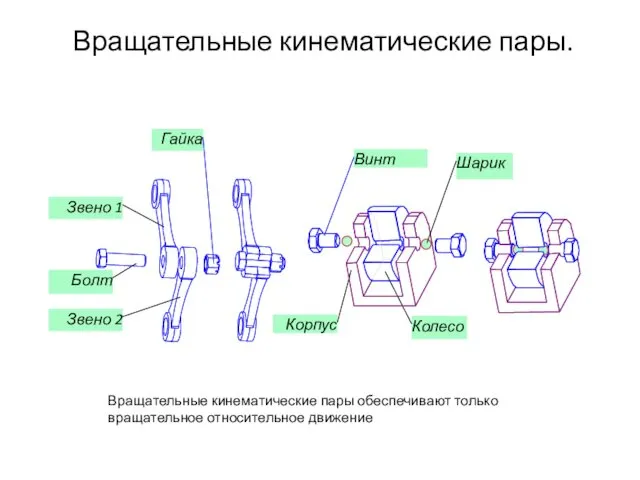
Вращательные кинематические пары.
Вращательные кинематические пары обеспечивают только
вращательное относительное движение
Винт
Корпус
Колесо
Болт
Звено 1
Звено 2
Гайка
Шарик
Вращательные кинематические пары.
Вращательные кинематические пары обеспечивают только
вращательное относительное движение
Винт
Корпус
Колесо
Болт
Звено 1
Звено 2
Гайка
Шарик
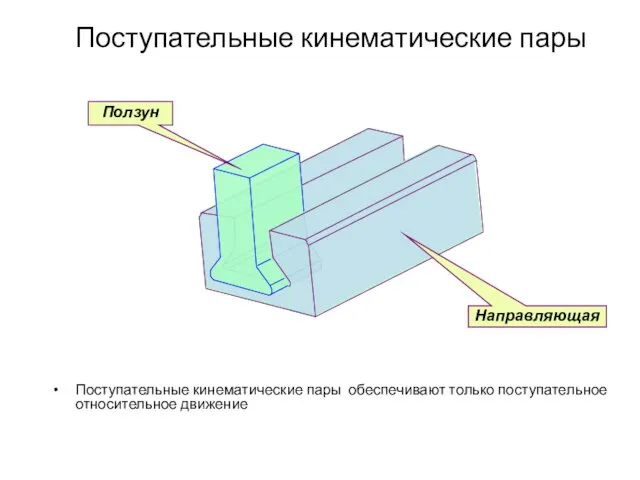
Поступательные кинематические пары
Поступательные кинематические пары обеспечивают только поступательное относительное движение
Ползун
Направляющая
Поступательные кинематические пары
Поступательные кинематические пары обеспечивают только поступательное относительное движение
Ползун
Направляющая
Высшие кинематические пары
Высшими называются кинематические пары в которых соприкосновение звеньев в сочленении
Высшие кинематические пары
Высшими называются кинематические пары в которых соприкосновение звеньев в сочленении

Классификация кинематических пар
Классификация кинематических пар

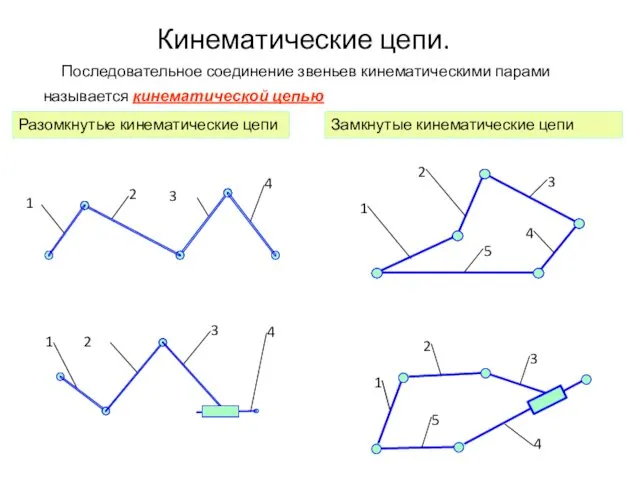
Кинематические цепи.
Последовательное соединение звеньев кинематическими парами называется кинематической цепью
Разомкнутые кинематические цепи
Замкнутые
Кинематические цепи.
Последовательное соединение звеньев кинематическими парами называется кинематической цепью
Разомкнутые кинематические цепи
Замкнутые
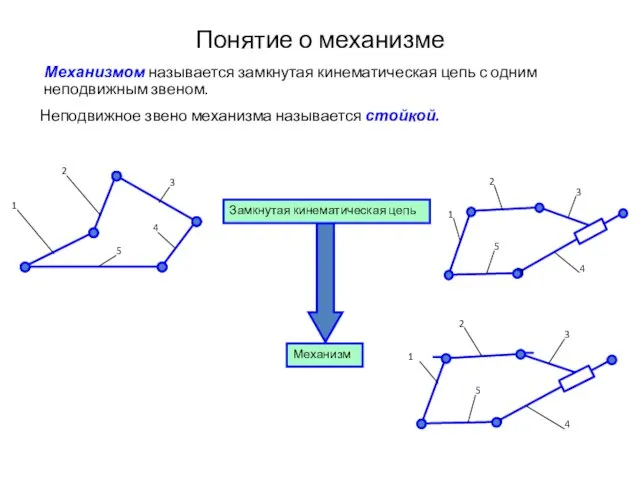
Понятие о механизме
Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном.
Замкнутая кинематическая
Понятие о механизме
Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном.
Замкнутая кинематическая
Под числом степеней свободы понимают число независимых параметров определяющих положение всех звеньев механизма.
Для
Под числом степеней свободы понимают число независимых параметров определяющих положение всех звеньев механизма.
Для
Степень свободы механизма
Для определения степени свободы плоского механизма используют формулу Чебышева
W=3(n-1)-2P5-1P4
Механизм имеет 5
Степень свободы механизма
Для определения степени свободы плоского механизма используют формулу Чебышева
W=3(n-1)-2P5-1P4
Механизм имеет 5
Точка касания
Замены высших кинематических пар
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
Точка касания
Замены высших кинематических пар
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
Избыточные связи
W=3(n-1)-2P5=3(5-1)-2·6=0
W=3(n-1)-2P5=3(4-1)-2·4=1
W=3(n-1)-2P5=3(3-1)-2·2-1=1
W=3(n-1)-2P5=3(4-1)-2·3-1=2
Лишние степени свободы
Избыточные связи
W=3(n-1)-2P5=3(5-1)-2·6=0
W=3(n-1)-2P5=3(4-1)-2·4=1
W=3(n-1)-2P5=3(3-1)-2·2-1=1
W=3(n-1)-2P5=3(4-1)-2·3-1=2
Лишние степени свободы
Образование механизма по Л.В. Ассуру
Большинство механизмов в технике имеют одну степень подвижности W=1.
Образование механизма по Л.В. Ассуру
Большинство механизмов в технике имеют одну степень подвижности W=1.
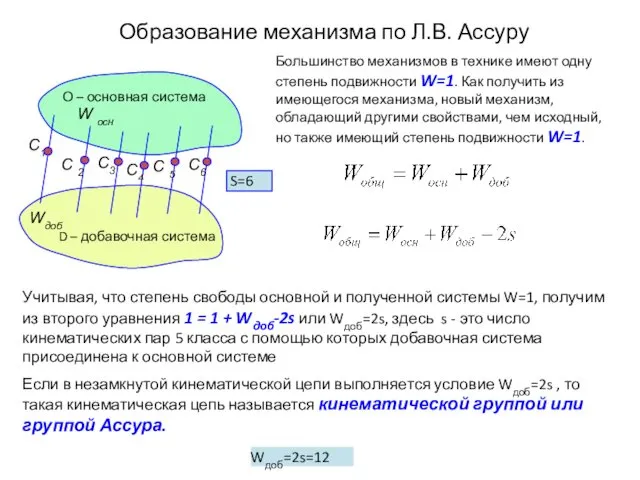
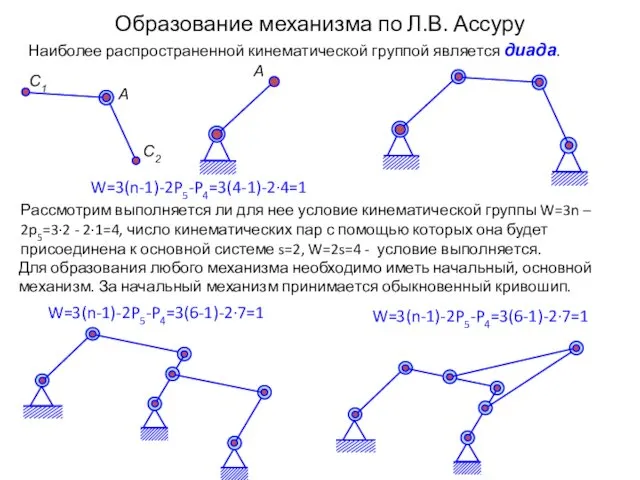
Образование механизма по Л.В. Ассуру
Рассмотрим выполняется ли для нее условие кинематической группы W=3n
Образование механизма по Л.В. Ассуру
Рассмотрим выполняется ли для нее условие кинематической группы W=3n
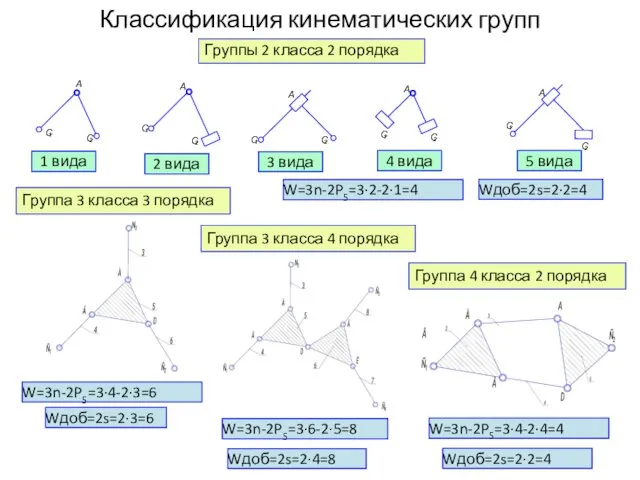
Классификация кинематических групп
Группа 3 класса 3 порядка
Группа 3 класса 4 порядка
Группа 4 класса
Классификация кинематических групп
Группа 3 класса 3 порядка
Группа 3 класса 4 порядка
Группа 4 класса
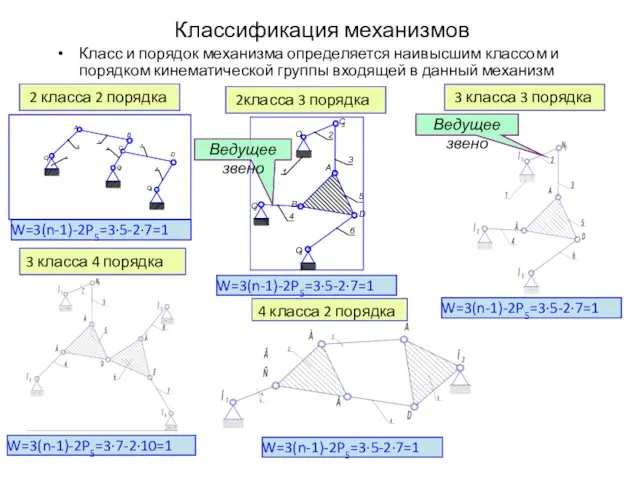
Классификация механизмов
Класс и порядок механизма определяется наивысшим классом и порядком кинематической группы входящей
Классификация механизмов
Класс и порядок механизма определяется наивысшим классом и порядком кинематической группы входящей
Пример структурного анализа механизма
Звено совершающее плоскопараллельное движение называется шатуном
Звено совершающее полный оборот
Пример структурного анализа механизма
Звено совершающее плоскопараллельное движение называется шатуном
Звено совершающее полный оборот
 Геометрические задачи практического содержания в вариантах ГИА
Геометрические задачи практического содержания в вариантах ГИА Основные сведения об администрировании сети
Основные сведения об администрировании сети Викторина Азбука вежливости
Викторина Азбука вежливости Тема Безударные гласные в корне слова.
Тема Безударные гласные в корне слова. Образ героев произведения Ревизор в цитатах
Образ героев произведения Ревизор в цитатах Корней Чуковский для детей
Корней Чуковский для детей Николай II (1894-1917)
Николай II (1894-1917) Биоэнергетические факторы спортивной работоспособности
Биоэнергетические факторы спортивной работоспособности Презентация Мир прав и обязанностей
Презентация Мир прав и обязанностей Презентация одежда. уход за одеждой
Презентация одежда. уход за одеждой Классный час о профилактике правонарушений
Классный час о профилактике правонарушений Wireless technology
Wireless technology Үш фазалы асинхронды қозғалтқыштың жұмыс процессі. Асинхронды қозғалтқыштың кернеу өрнектері
Үш фазалы асинхронды қозғалтқыштың жұмыс процессі. Асинхронды қозғалтқыштың кернеу өрнектері Православный храм
Православный храм Презентация к классному часу Узловая в годы Великой Отечественной войны
Презентация к классному часу Узловая в годы Великой Отечественной войны Липецк- это наш город Диск
Липецк- это наш город Диск СП Ветошкиной К.А. 37 группа
СП Ветошкиной К.А. 37 группа Сталинградская битва
Сталинградская битва Конструкция have to
Конструкция have to Заболевания, передающиеся половым путем. Венерические заболевания
Заболевания, передающиеся половым путем. Венерические заболевания Электролиз
Электролиз Портфолио10-а класса 2017-2018 учебный год
Портфолио10-а класса 2017-2018 учебный год Здоровый образ жизни и его составляющие
Здоровый образ жизни и его составляющие Кафедра радиохимии Санкт-Петербургского государственного университета (к 70-летию со дня основания)
Кафедра радиохимии Санкт-Петербургского государственного университета (к 70-летию со дня основания) Соли
Соли Компьютерная графика для строителей
Компьютерная графика для строителей Схема территориального размещения участников промышленного кластера
Схема территориального размещения участников промышленного кластера Техника СССР во Время Великой Отечественной войны
Техника СССР во Время Великой Отечественной войны