- Компьютерная графика для строителей

Содержание
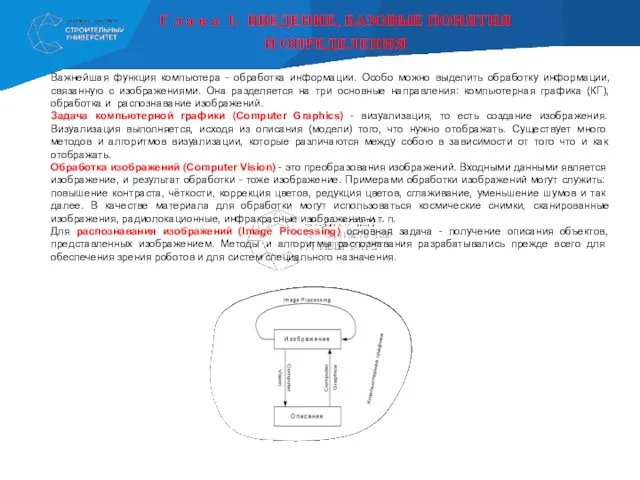
- 2. Г л а в а 1. ВВЕДЕНИЕ, БАЗОВЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ Важнейшая функция компьютера - обработка
- 3. Основные области применения компьютерной графики: Конструкторская графика (автоматизация проектно-конструкторских работ) Иллюстративная графика Деловая графика Научная графика
- 4. Базовые понятия КГ Графический примитив Мировая система координат Пользовательская система координат Нормированная система координат Графический блок
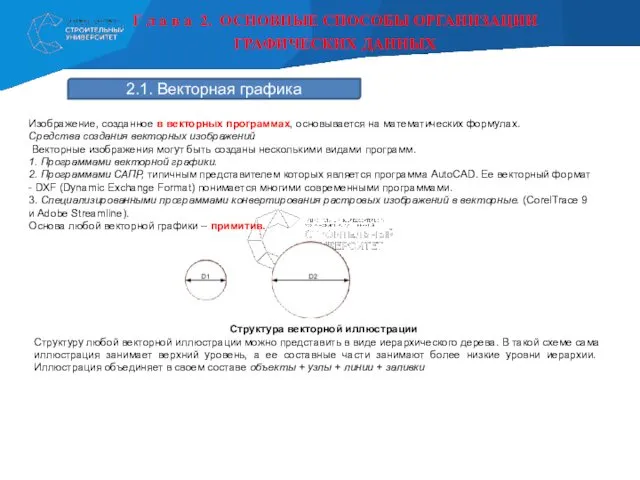
- 5. Г л а в а 2. ОСНОВНЫЕ СПОСОБЫ ОРГАНИЗАЦИИ ГРАФИЧЕСКИХ ДАННЫХ 2.1. Векторная графика Изображение, созданное
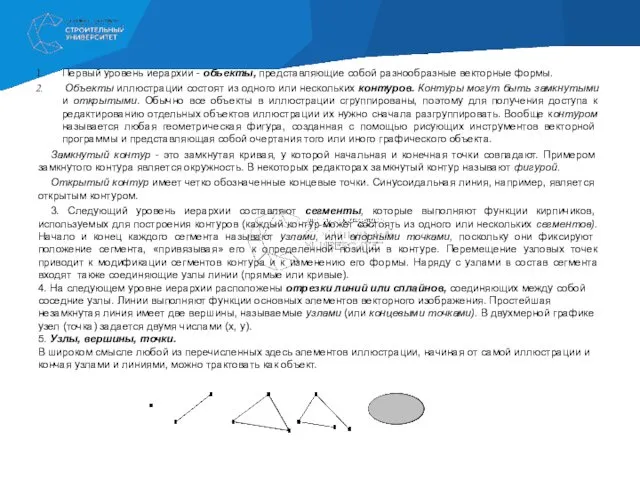
- 6. Следующий уровень иерархии - объекты, представляющие собой разнообразные векторные формы. В большинстве редакторов для их отображения
- 7. Отдельными элементами векторной графики являются: Заливка (штриховка) – это цвет или узор, выводимый в замкнутой области,
- 8. Кривые Безъе — это частный вид кривых третьего порядка, требующий для своего описания меньшего количества параметров
- 9. Недостатки 1. Практически невозможно осуществить экспорт изображения из растрового формата в векторный. И наоборот, обратное преобразование
- 10. Количество цветов (глубина цвета) - важная характеристика любого изображения, не только растрового. В соответствии с психофизиологическими
- 11. Методы улучшения растровых изображений Устранение ступенчатого эффекта В растровых системах при невысокой разрешающей способности (меньше 300
- 12. Устранение ступенчатого эффекта называется на английском языке antialiasing. Для того чтобы растровое изображение линии выглядело более
- 13. где Ρ - значение цвета текущего пиксела, F - новое значение цвета пиксела, К - нормирующий
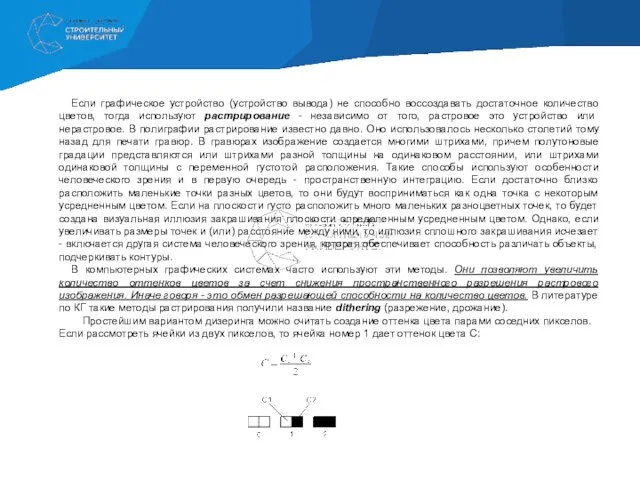
- 14. Если графическое устройство (устройство вывода) не способно воссоздавать достаточное количество цветов, тогда используют растрирование - независимо
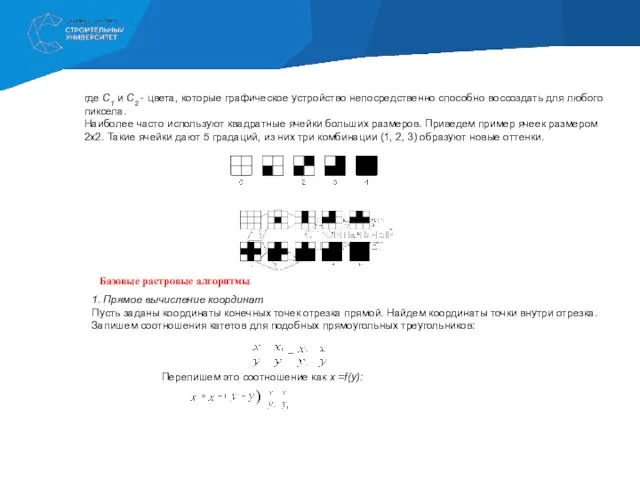
- 15. где С1 и С2 - цвета, которые графическое устройство непосредственно способно воссоздать для любого пиксела. Наиболее
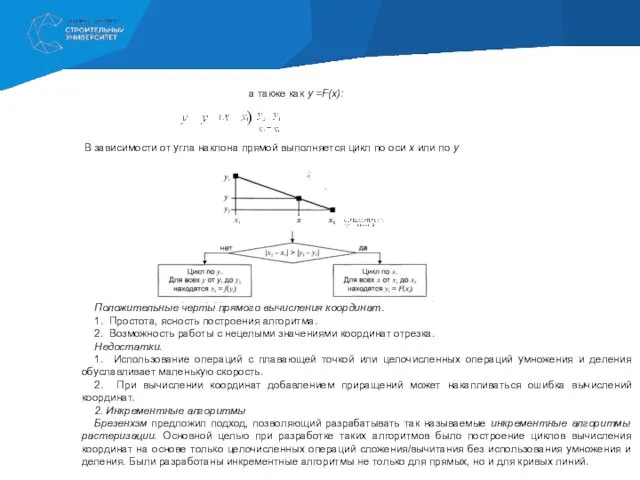
- 16. а также как y =F(x): ) В зависимости от угла наклона прямой выполняется цикл по оси
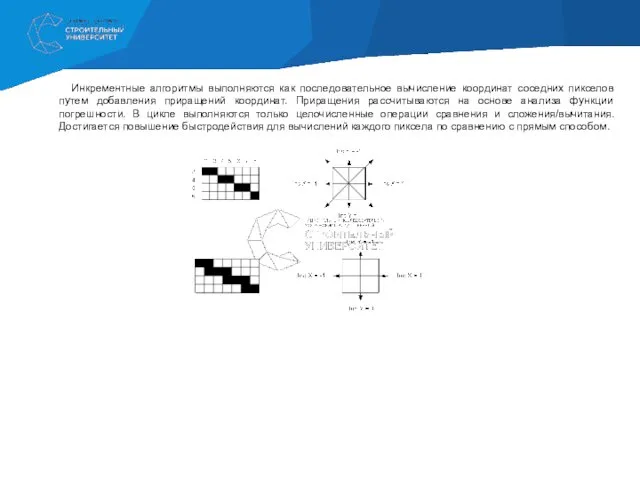
- 17. Инкрементные алгоритмы выполняются как последовательное вычисление координат соседних пикселов путем добавления приращений координат. Приращения рассчитываются на
- 18. Инструменты растровых графических пакетов К фундаментальным инструментам растровой графики относятся такие инструменты обработки изображений, как: •
- 19. Таким образом, под термином выделение (или выделенная область) будем понимать области изображений и объектов, доступные для
- 20. Ретушь Bнструменты ретуширования изображений предназначены для восстановления поврежденных изображений, например, для ретуши фотографий. Ретушь (retouch) -
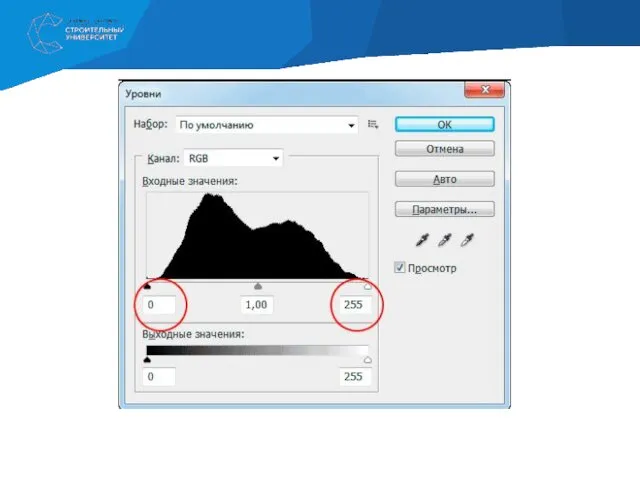
- 21. Гистограммы Инструмент Гистограмма (Histogram) позволяет оценить разброс между минимальной и максимальной яркостью изображения (динамический диапазон). С
- 22. Параметрами раздела Выходные уровни (Output Levels) можно управлять точно так же, как и входными параметрами. Однако
- 24. Цветовая коррекция и цветовой баланс См. подраздел «Цветовые модели в КГ Фильтры (Plug-ins) и спецэффекты (Effects)
- 25. Пример 1. Алгоритм работы фильтра Размывание 1. При подготовке к размыванию цифровое изображение считывается в память
- 26. Недостатки Объем файла точечной графики однозначно определяется произведением площади изображения на разрешение и на глубину цвета
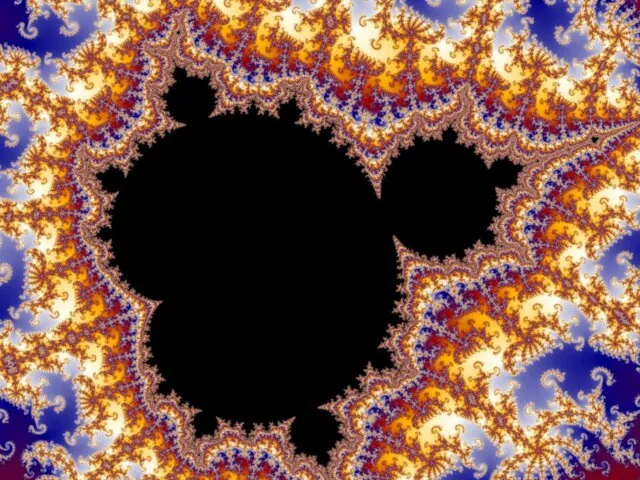
- 27. 2. Математические фракталы Фракталом Мандельброта названа фигура, которая порождается очень простым циклом. Для создания этого фрактала
- 29. Фрактал Жулиа совсем не похож на фрактал Мандельброта, однако, он определяется итерационным циклом, почти полностью тождественным
- 32. 3. Фракталы, которые генерируются согласно методу "систем итеративных функций" - IFS (Iterated Functions Systems). Этот метод
- 33. Если α = 0 , то ствол и все ветви прямые. Потом находим точку 4. От
- 34. Сферы применения фрактальной графики. 1.Создание алгоритма фрактального сжатия графической информации. Так, метод IFS используется не только
- 35. Преимущества и недостатки фрактальной графики Достоинства Качественный, легко реализуемый математический аппарат. Недостатки Отсутствие «родных» форматов файлов.
- 36. Г л а в а 3. Методы, модели и алгоритмы создания сложных реалистических объектов и сцен
- 37. Для КГ принципиальным, и чаще всего программно-реализуемым является класс плоских геометрических проекций, так как проецирование производится
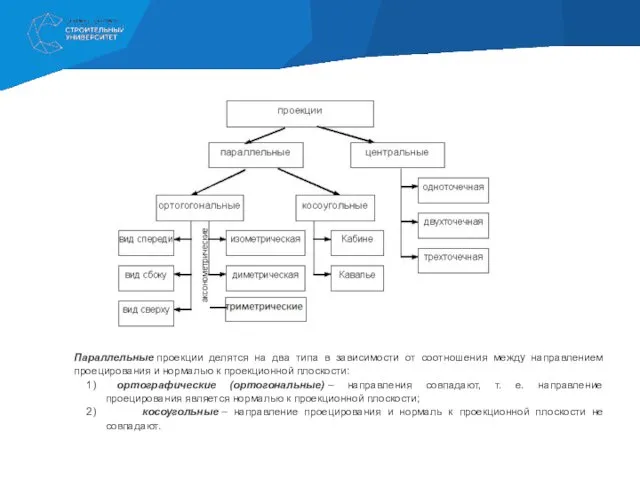
- 38. Параллельные проекции делятся на два типа в зависимости от соотношения между направлением проецирования и нормалью к
- 39. Наиболее широко используемыми видами ортографических проекций является вид спереди, вид сверху(план) и вид сбоку, в которых
- 40. Изометрическая проекция — это разновидность аксонометрической проекции, при которой в отображении трёхмерного объекта на плоскость коэффициент
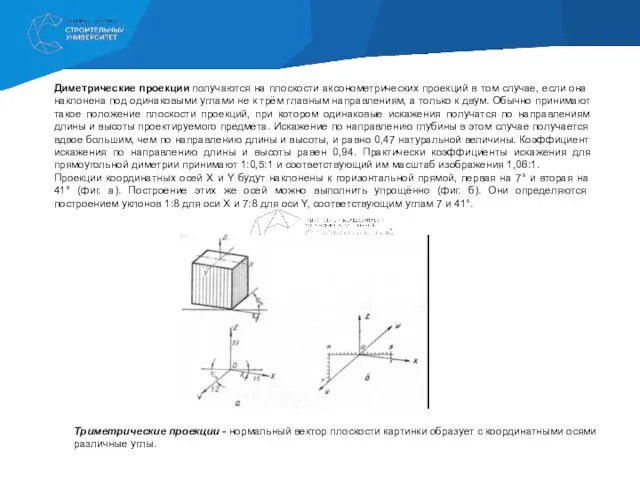
- 41. Диметрические проекции получаются на плоскости аксонометрических проекций в том случае, если она наклонена под одинаковыми углами
- 42. Косоугольные (наклонные) проекции сочетают в себе свойства ортографических проекций (видов спереди, сверху и сбоку) со свойствами
- 43. В проекции Кавалье направление проецирования составляет с плоскостью угол 45°. В результате проекция отрезка, перпендикулярного проекционной
- 44. Центральная проекция любой совокупности параллельных прямых, которые не параллельны проекционной плоскости, будет сходиться в точке схода.
- 45. Сеточное описание поверхностей Полигональная сетка — это совокупность вершин, рёбер и граней, которые определяют форму объекта
- 46. Полигональные сетки могут быть представлены множеством способов, используя разные способы хранения вершин, ребер и граней. В
- 47. Сетка с использованием списка граней представляет объект как множество граней и множество вершин. Это самое широко
- 48. "Крылатое" (каркасное) представление явно представляет вершины, грани и ребра сетки. Это представление широко используется в программах
- 50. Равномерная сетка. Эта модель описывает координаты отдельных точек поверхности следующим способом - каждому узлу сетки с
- 51. Неравномерной сеткой называется модель описания поверхности в виде множества отдельных точек {(x0, y0, z0), (x1, y1,
- 52. Вторая задача заключается в отображении (визуализации) поверхности. Эту задачу можно решать несколькими способами. Один из наиболее
- 53. Триангуляцией Делоне для множества точек S на плоскости называют триангуляцию DT(S), такую что никакая точка A
- 54. так как для оставшихся двух уравнений коэффициенты находятся аналогично. Запишем условие для построения сплайна: Перепишем выражение
- 55. Отсюда получаем векторно-матричное уравнение: Эта система решается относительно Сx нахождением обратной матрицы размером 4x4 - эрмитова
- 56. Форму кривой, заданной в форме Эрмита, легко изменять если учитывать, что направление вектора касательной задает начальное
- 57. Многочлены Безье для Рx и Рy имеют такой вид: где xi и yi - координаты точек-ориентиров
- 58. т = 3 (по четырем точкам, кубическая). Используется довольно часто, в особенности в сплайновых кривых: P(t)
- 59. B-сплайны Кривая, построенная на основе B-сплайн-базиса, описывается следующим образом где - радиус-вектор точек на кривой, -
- 60. Здесь xi – элементы узлового вектора, а t – параметр, изменяющийся в диапазоне от 0 до
- 61. B-сплайн-кривая является полиномом степени (k–1) на каждом интервале (xi, xi+1) и что все ее производные до
- 62. Форма Эрмита Поверхности в форме Эрмита используют в качестве исходных данных управляющие точки и касательные векторы.
- 63. В верхнем левом углу матрицы размером 2x2 находятся четыре координаты углов фрагмента поверхности, в верхней правой
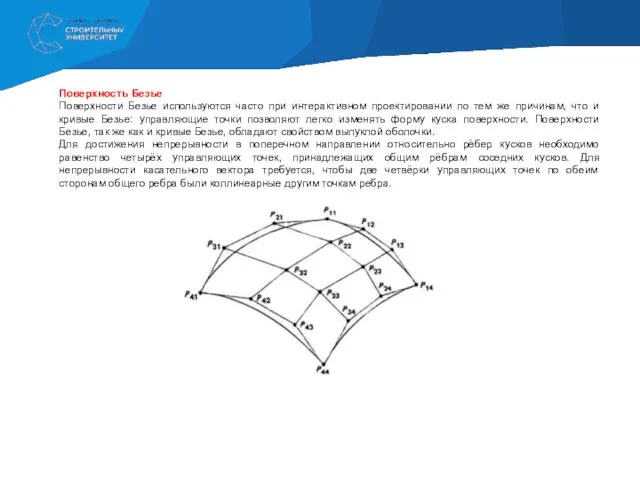
- 64. Поверхность Безье Поверхности Безье используются часто при интерактивном проектировании по тем же причинам, что и кривые
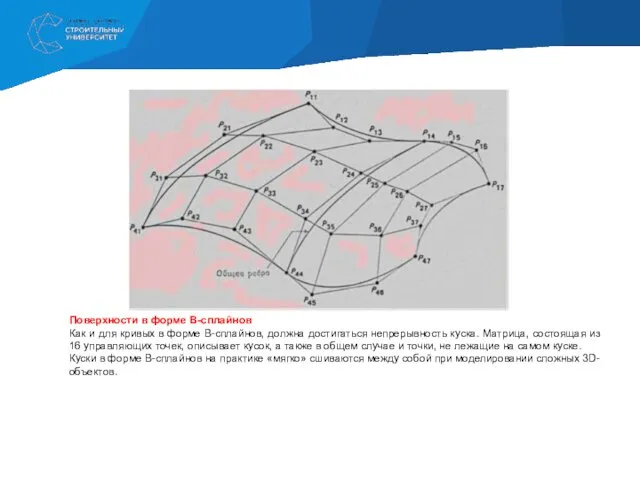
- 65. Поверхности в форме B-сплайнов Как и для кривых в форме B-сплайнов, должна достигаться непрерывность куска. Матрица,
- 66. В-сплайн поверхность может содержать плоские области и линии резкого нарушения гладкости. Это свойство очень полезно во
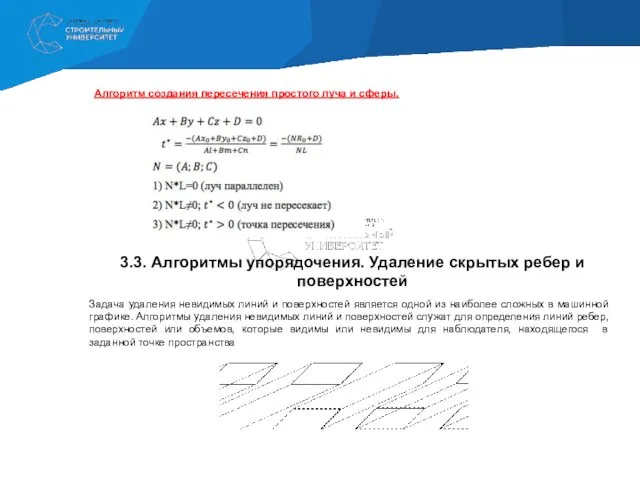
- 67. 3.2. Алгоритмы пересечения Алгоритмы определения взаимных пересечений графических объектов. Алгоритм создания пересечения простого луча и сферы.
- 68. Алгоритм создания пересечения простого луча и сферы. 3.3. Алгоритмы упорядочения. Удаление скрытых ребер и поверхностей Задача
- 69. Сложность задачи удаления невидимых линий и поверхностей привела к появлению большого числа различных способов ее решения.
- 70. Алгоритмы удаления невидимых линий или поверхностей можно классифицировать по способу выбора системы координат или пространства, в
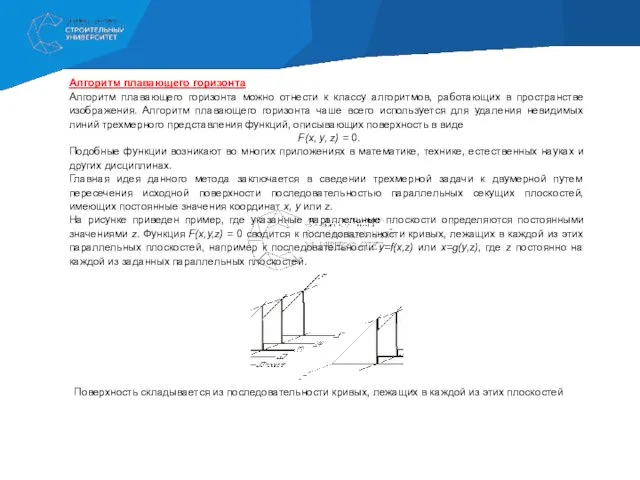
- 71. Алгоритм плавающего горизонта Алгоритм плавающего горизонта можно отнести к классу алгоритмов, работающих в пространстве изображения. Алгоритм
- 72. Предполагается, что полученные кривые являются однозначными функциями независимых переменных. Если спроецировать полученные кривые на плоскость z
- 73. Алгоритм Робертса Алгоритм Робертса представляет собой первое известное решение задачи об удалении невидимых линий. Алгоритм прежде
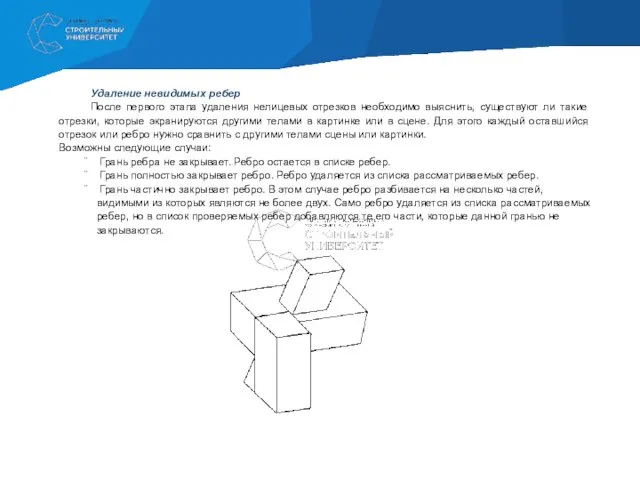
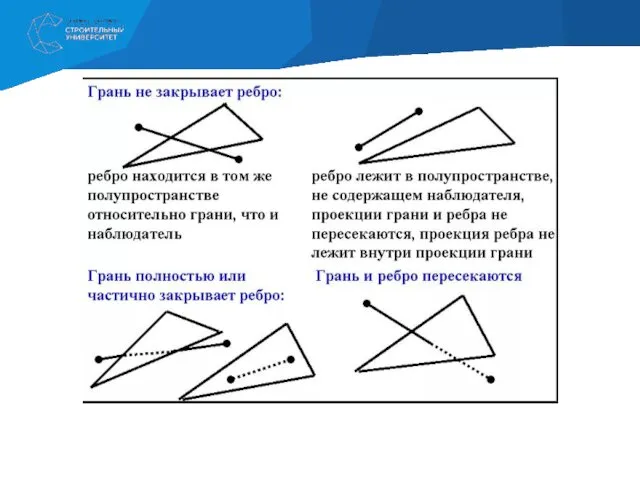
- 74. Удаление невидимых ребер После первого этапа удаления нелицевых отрезков необходимо выяснить, существуют ли такие отрезки, которые
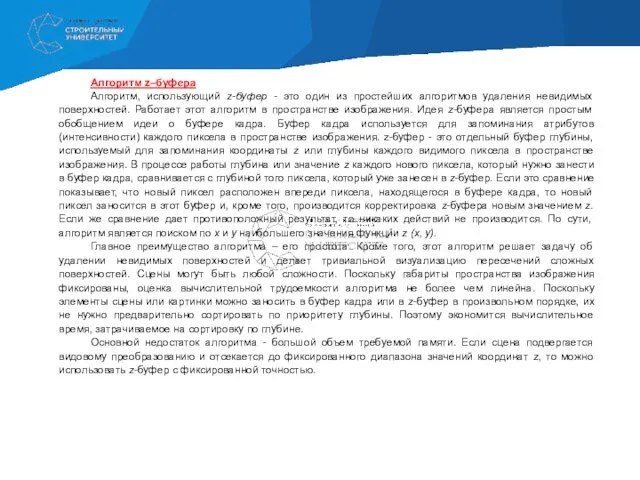
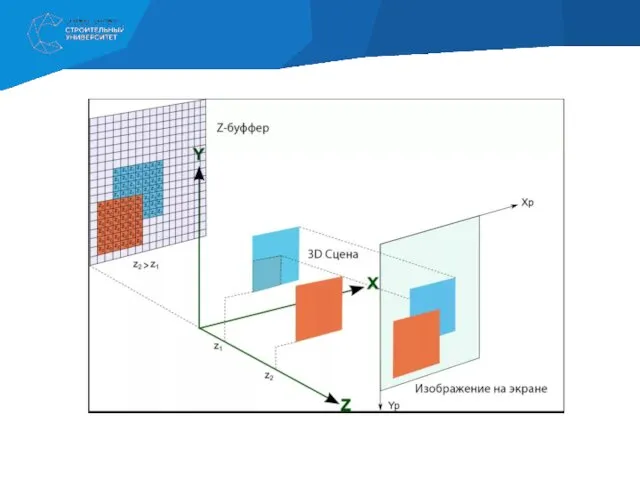
- 76. Алгоритм z–буфера Алгоритм, использующий z-буфер - это один из простейших алгоритмов удаления невидимых поверхностей. Работает этот
- 78. Другой недостаток алгоритма z-буфера состоит в трудоемкости и высокой стоимости устранения лестничного эффекта, а также реализации
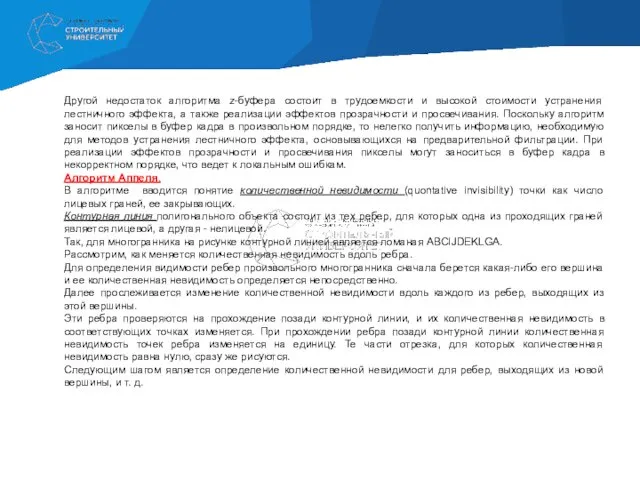
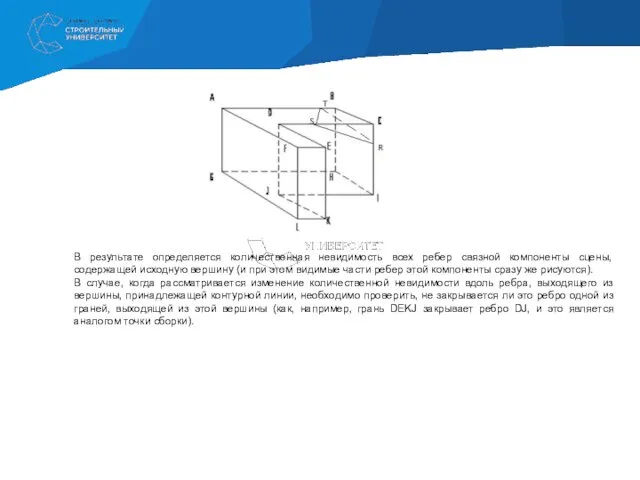
- 79. В результате определяется количественная невидимость всех ребер связной компоненты сцены, содержащей исходную вершину (и при этом
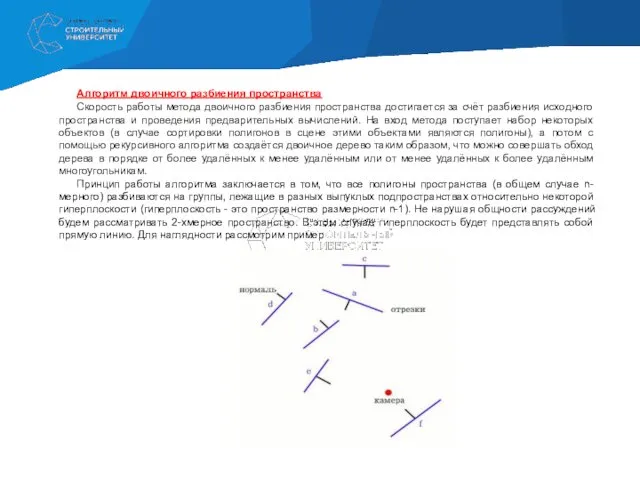
- 80. Алгоритм двоичного разбиения пространства Скорость работы метода двоичного разбиения пространства достигается за счёт разбиения исходного пространства
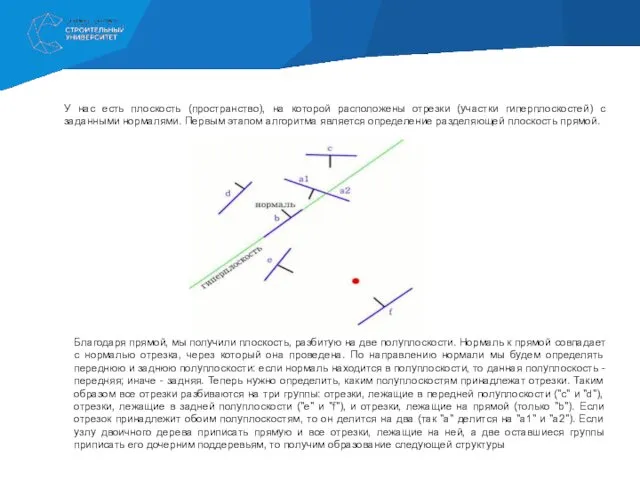
- 81. У нас есть плоскость (пространство), на которой расположены отрезки (участки гиперплоскостей) с заданными нормалями. Первым этапом
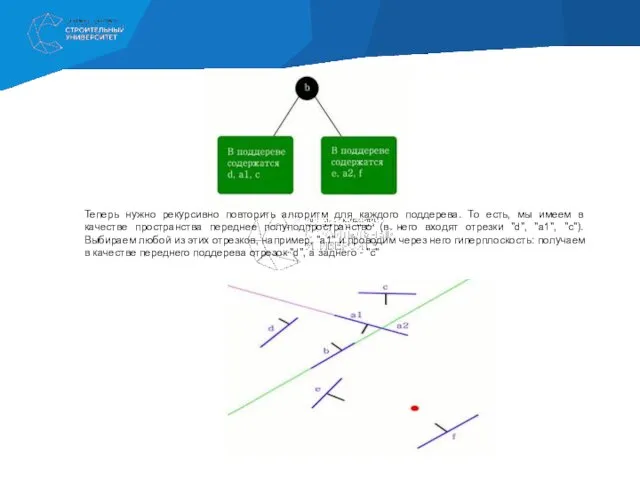
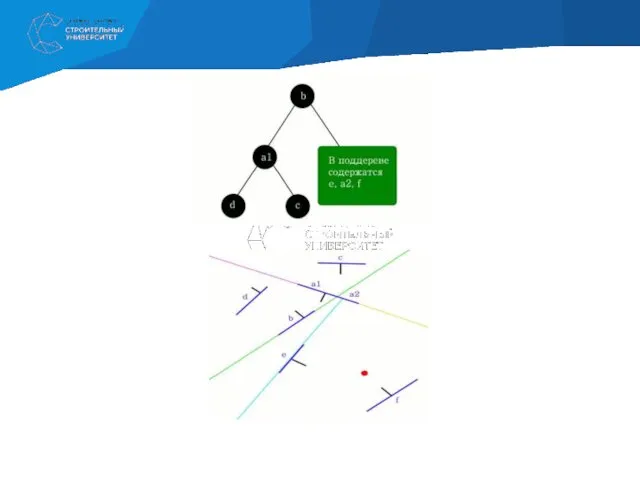
- 82. Теперь нужно рекурсивно повторить алгоритм для каждого поддерева. То есть, мы имеем в качестве пространства переднее
- 84. Зная исходное положение камеры (наблюдателя), нужно обойти все дерево по полигонам от самого дальнего до самого
- 85. Свет имеет двойственную природу, обладая свойствами волны и частицы. Корпускулы света, называемые фотонами, излучаются источником света
- 86. Если пропустить луч белого света через простую призму, он разложится на цветной спектр (опыты И. Ньютона).
- 87. Все, что мы видим в окружающем нас пространстве, либо излучает свет, либо его отражает. Излученный цвет
- 88. Первую группу составляют ахроматические (иначе бесцветные) цвета: черный, белый и все серые (от самого темного до
- 89. Палочки «отвечают» за черно-белое зрение, поскольку способны регистрировать только суммарную энергию света. Этот тип рецепторов равномерно
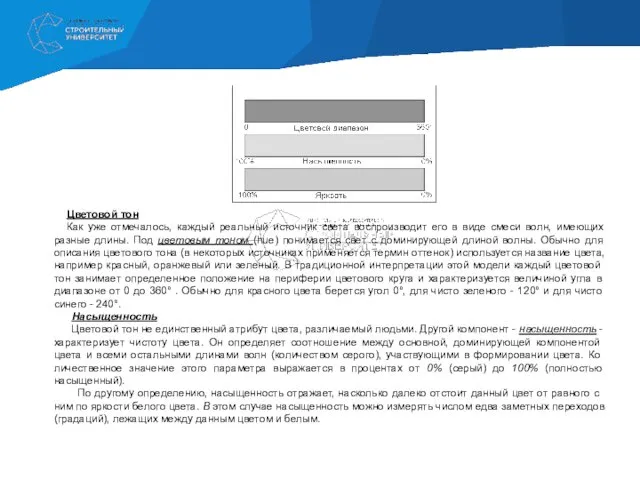
- 90. Для характеристики цвета используются следующие атрибуты. 1. Цветовой тон. Его можно определить преобладающей длиной волны в
- 91. Аддитивные цветовые модели Аддитивный цвет получается на основе законов Грассмана путем соединения лучей света разных цветов.
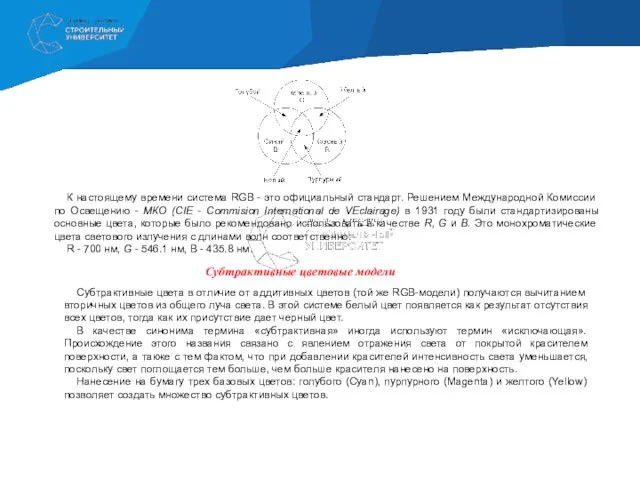
- 92. К настоящему времени система RGB - это официальный стандарт. Решением Международной Комиссии по Освещению - МКО
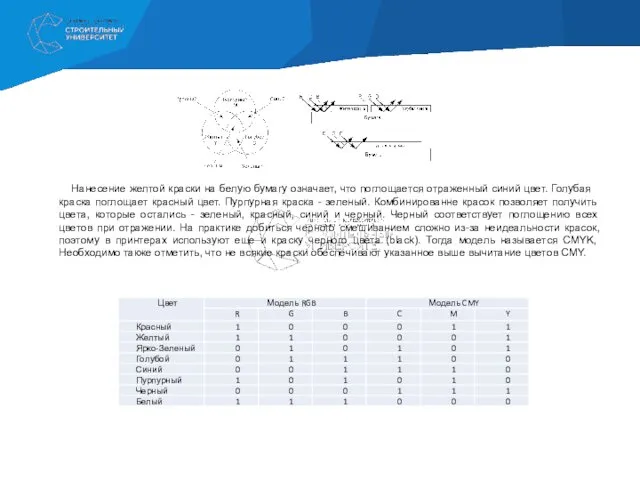
- 93. Нанесение желтой краски на белую бумагу означает, что поглощается отраженный синий цвет. Голубая краска поглощает красный
- 94. Существуют две наиболее распространенные версии субтрактивной модели: CMY и CMYK. Первая из них используется в том
- 95. Цветовой тон Как уже отмечалось, каждый реальный источник света воспроизводит его в виде смеси волн, имеющих
- 96. Яркость характеризует интенсивность, с которой энергия света воздействует на рецепторы нашего глаза. Ее можно интерпретировать также
- 97. Системы соответствия цветов Для упрощения процедуры идентификации цвета ведущими фирмами, специализирующимися в области полиграфии и производстве
- 98. С = 00000000 bbbbbbbb gggggggg rrrrrrrr. Триадные и плашечные цвета Для печатания результатов работы, выполненной вами
- 99. 3.5. Модели расчета освещенности в компьютерной графике. Закрашивание поверхностей Немного о свете Зеркальное отражение света. Угол
- 100. Диффузное отражение. Этот вид отражения присущ матовым поверхностям. Матовой можно считать такую поверхность, размер шероховатостей которой
- 101. Метод Гуро Этот метод предназначен для создания иллюзии гладкой криволинейной поверхности, которая описана в виде многогранников
- 102. где I - интенсивность точечного источника света, Is - интенсивность зеркально отраженного излучения, Id - интенсивность
- 103. На основе нормалей в вершинах вычисляются значения интенсивностей в вершинах в соответствии с выбранной моделью отражения
- 104. Интерполированная интенсивность I в точке (X, У) определяется, исходя из пропорции откуда Значение интенсивности I1 и
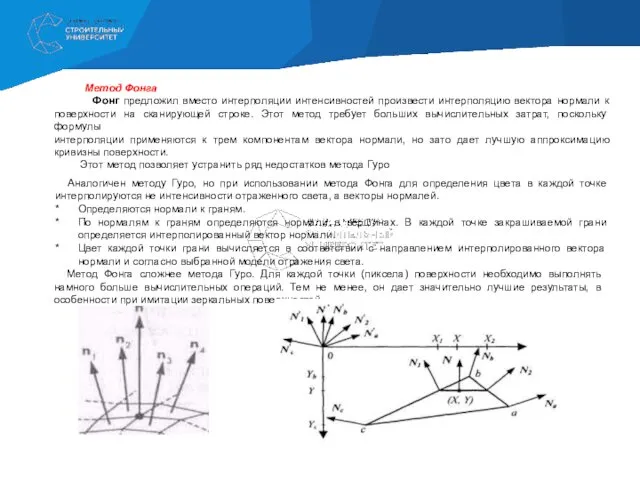
- 105. Метод Фонга Фонг предложил вместо интерполяции интенсивностей произвести интерполяцию вектора нормали к поверхности на сканирующей строке.
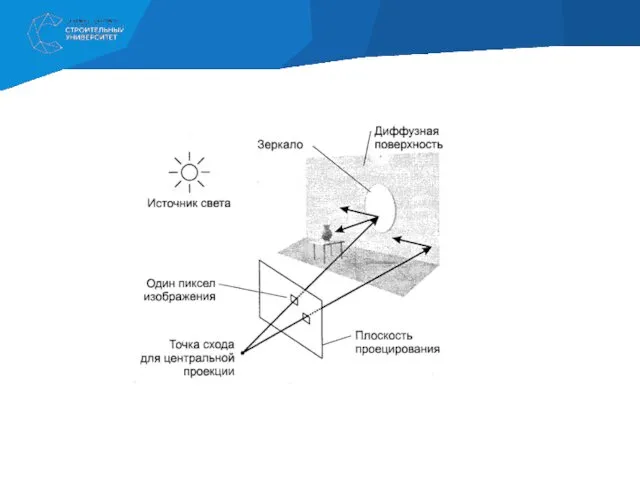
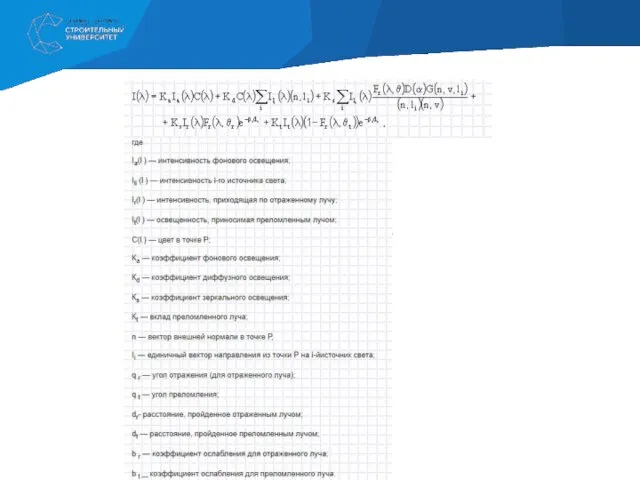
- 106. Трассировка лучей Методы трассировки лучей (Ray Tracing) на сегодняшний день считаются наиболее мощными и универсальными методами
- 109. Непосредственная реализация данной лучевой модели формирования изображения представляется затруднительной. Можно попробовать разработать алгоритм построения изображения указанным
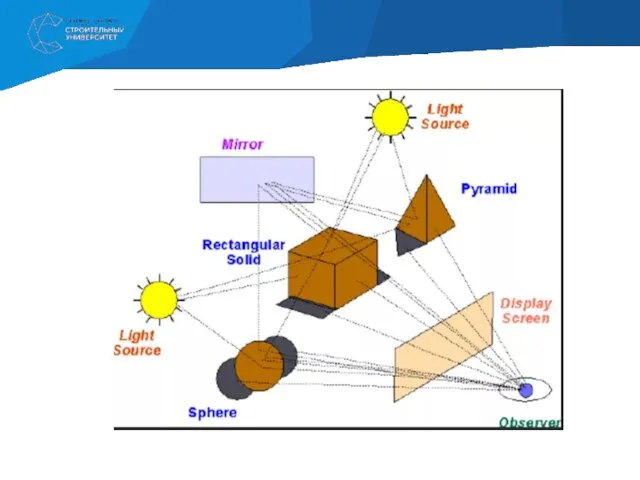
- 111. Алгоритмы трассировки носят характер рекурсивной процедуры, которая вызывает саму себя при появлении вторичного луча (анализируемый луч
- 112. Положительные черты метода обратной трассировки: ● универсальность, применимость для синтеза изображений достаточно сложных пространственных сцен. Воплощает
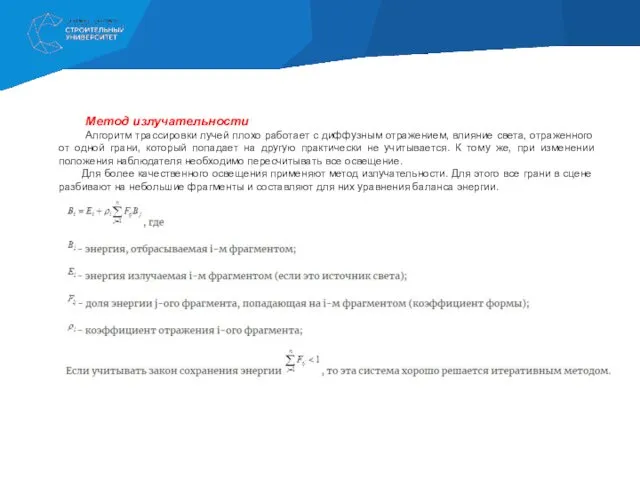
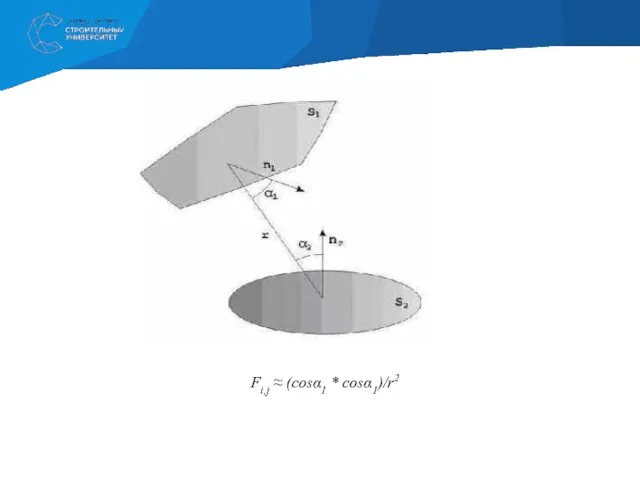
- 113. Метод излучательности Алгоритм трассировки лучей плохо работает с диффузным отражением, влияние света, отраженного от одной грани,
- 114. Fi,j ≈ (cosα1 * cosα1)/r2
- 115. 3.6. Анимация в компьютерной графике Анимация - это создание зрительной иллюзии движения, изменения чего-то во времени.
- 116. Для создания иллюзии механического движения достаточно перемещать (поворачивать) одни модели относительно других моделей или относительно неподвижного
- 117. В качестве примера этого метода можно привести морфинг (термин происходит от слова metamorphosing - проведение преобразования).
- 118. Сложность скелета определяется требуемым уровнем детализации изображаемого объекта. Например, при изображении человека, шагающего где-то вдали, достаточно
- 119. Обобщим эту формулу для шарнирного соединения n костей. Р = Мп * Pn, где Рn —
- 120. Как подмножество метода интерполяции вершин может рассматриваться vertex skinning - метод трансформации вершин геометрической сетки в
- 121. В соответствии с методом прямой кинематики (Forward Kinematics) управляя углами поворота костей скелета, добиваются требуемых поз.
- 122. При использовании метода моделирования частиц (particles) создается набор частиц (часто в качестве частиц используются точки, то
- 123. 3.7. Текстурирование в компьютерной графике Текстура представляет собой двумерное растровое изображение, которое накладывается (натягивается) на поверхность
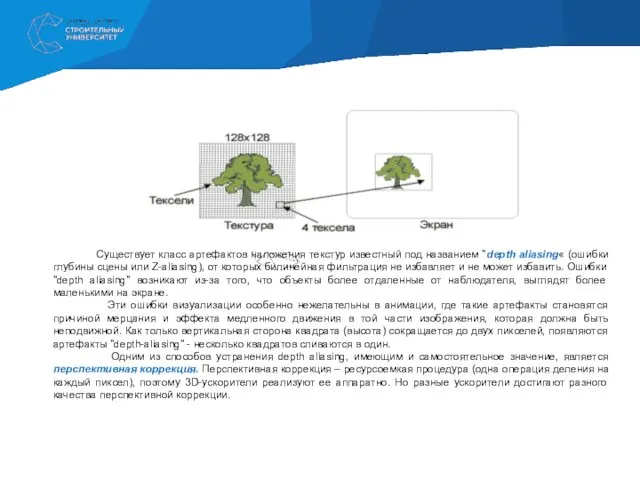
- 124. Когда изображение используется в качестве текстуры, накладываемой на 3D примитив, проявляется множество разнообразных ошибок визуализации, называемых
- 125. Bi-linear filtering - это техника устранения искажений изображения (фильтрация), таких, как "блочность" текстур при их увеличении.
- 126. Существует класс артефактов наложения текстур известный под названием "depth aliasing« (ошибки глубины сцены или Z-aliasing), от
- 127. Для избежания ошибок "depth aliasing" используется техника, известная как mip-mapping. Если говорить кратко, то mip-mapping —
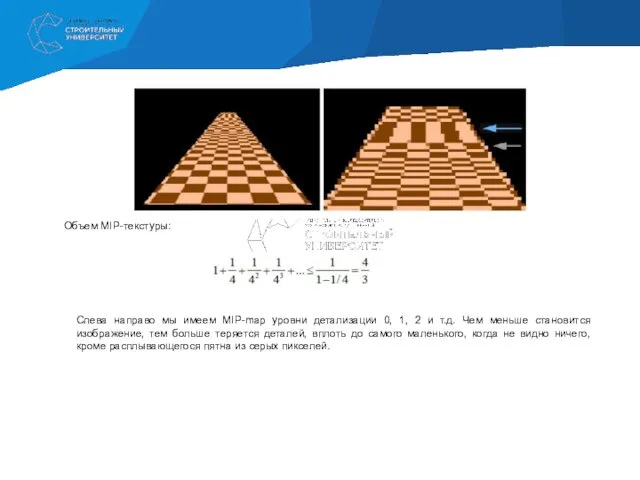
- 128. Объем MIP-текстуры: Слева направо мы имеем MIP-map уровни детализации 0, 1, 2 и т.д. Чем меньше
- 129. Проблемы Mip-текстурирования В то время, как mip-текстурирование решает проблему ошибок "depth-aliasing", его использование может стать причиной
- 130. Анизотропная фильтрация обычно оперирует не менее чем 8 текселями, во все стороны mip-map уровней, при этом
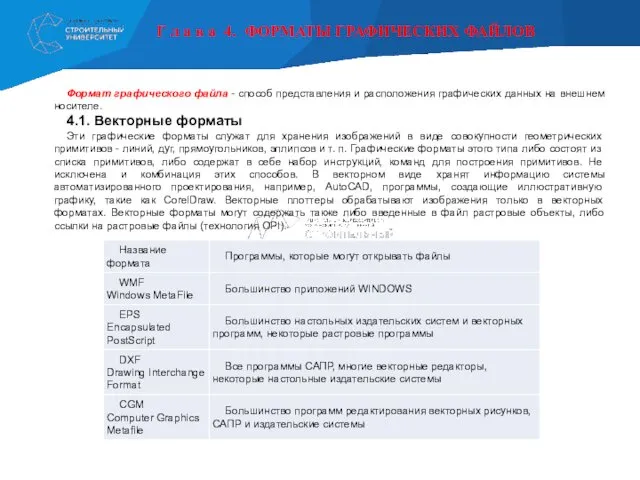
- 132. Г л а в а 4. ФОРМАТЫ ГРАФИЧЕСКИХ ФАЙЛОВ Формат графического файла - способ представления и
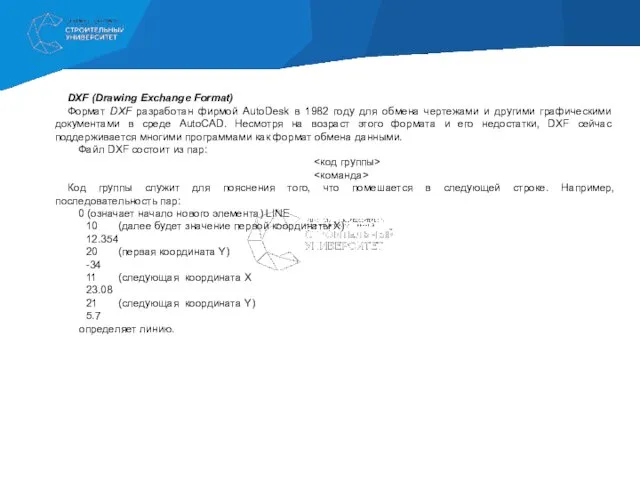
- 133. DXF (Drawing Exchange Format) Формат DXF разработан фирмой AutoDesk в 1982 году для обмена чертежами и
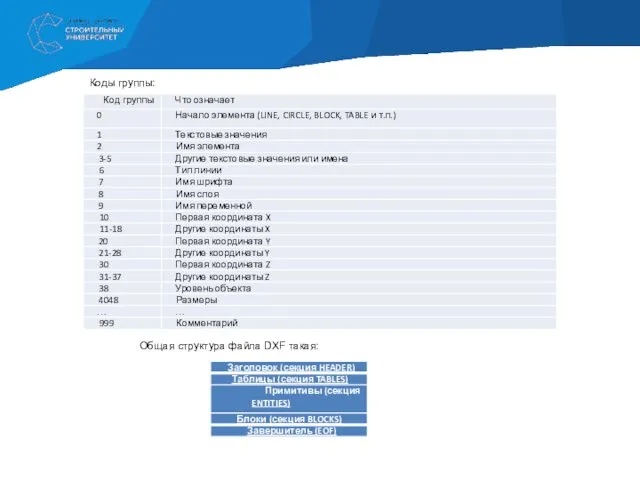
- 134. Общая структура файла DXF такая: Коды группы:
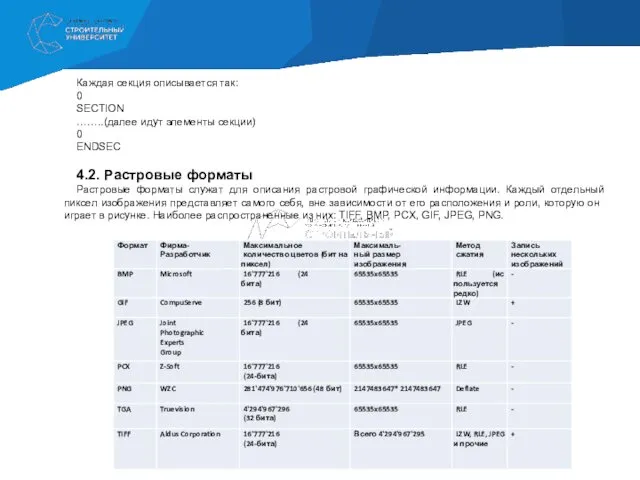
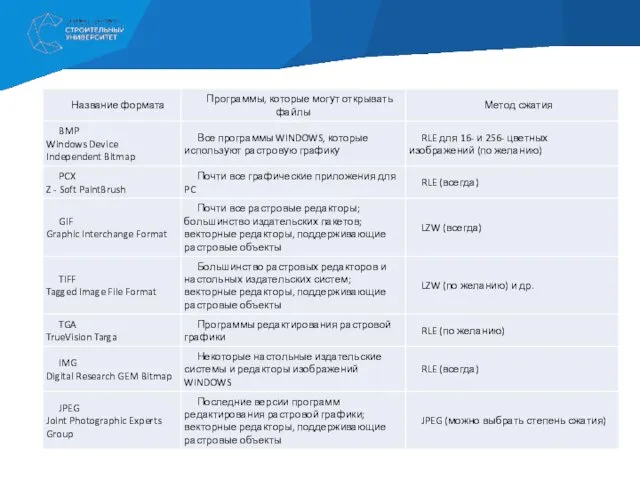
- 135. Каждая секция описывается так: 0 SECTION ……..(далее идут элементы секции) 0 ENDSEC 4.2. Растровые форматы Растровые
- 136. В файлах растровых форматов запоминаются: • размер изображения - количество видеопикселей в рисунке по горизонтали и
- 137. OPI (Open Prepress Interface) технология, разработанная фирмой Aldus, позволяющая импортировать не оригинальные файлы, а их образы,
- 138. Приведем пример кодирования. Строка байтовых данных 241 16 72 10 10 10 10 10 241 16
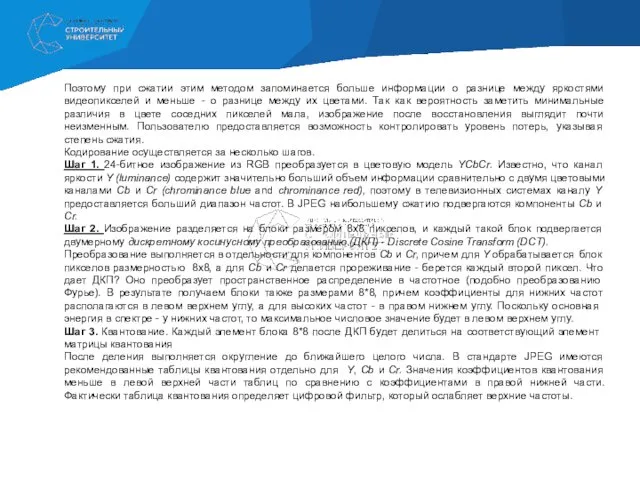
- 139. Поэтому при сжатии этим методом запоминается больше информации о разнице между яркостями видеопикселей и меньше -
- 140. Указанные в стандарте таблицы не являются обязательными - любая программа файлов JPEG может использовать собственные таблицы
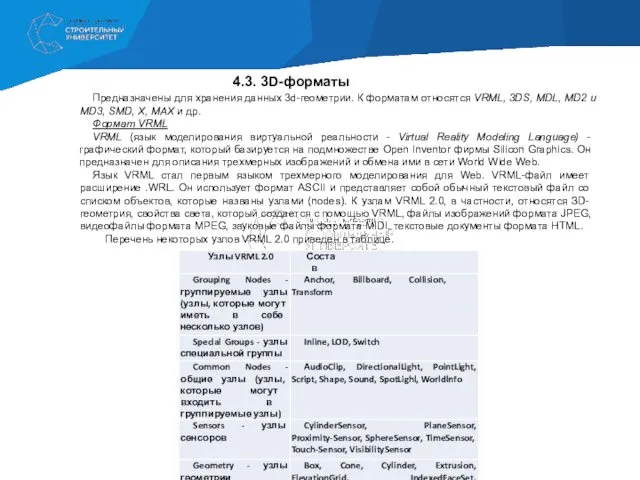
- 142. 4.3. 3D-форматы Предназначены для хранения данных 3d-геометрии. К форматам относятся VRML, 3DS, MDL, MD2 и MD3,
- 143. 4.4. Форматы мультимедиа Один из приемов, который используется при работе с видеоданными, состоит в вычислении последовательных
- 144. Формат видеофайлов MPEG (Motion Picture Experts Group), сжимающий видеофайлы по алгоритмам, удаляющим избыточную информацию, в частности
- 145. Формат QuickTime, разработанный фирмой Apple для операционных систем семейств Macintosh и Windows. QuickTime - расширение программного
- 146. RTF (Microsoft Rich Text Format) Текстовый формат RTF имеет неординарные способности к переносу текстов из одной
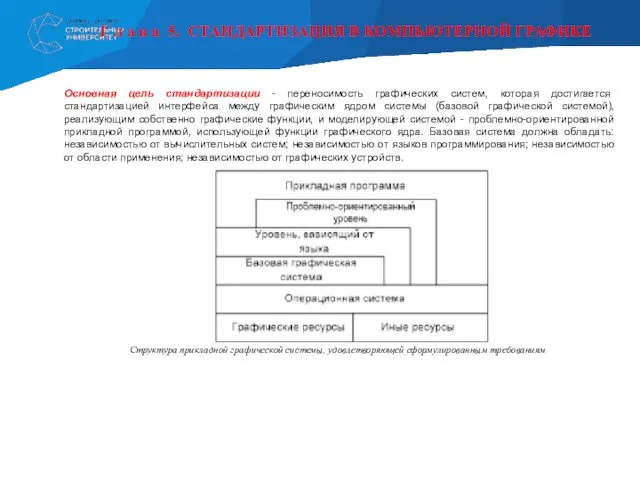
- 147. Г л а в а 5. СТАНДАРТИЗАЦИЯ В КОМПЬЮТЕРНОЙ ГРАФИКЕ Основная цель стандартизации - переносимость графических
- 148. Процесс преобразования графической информации при выполнении вывода может быть представлен состоящим из следующих стандартизованных этапов: 1.
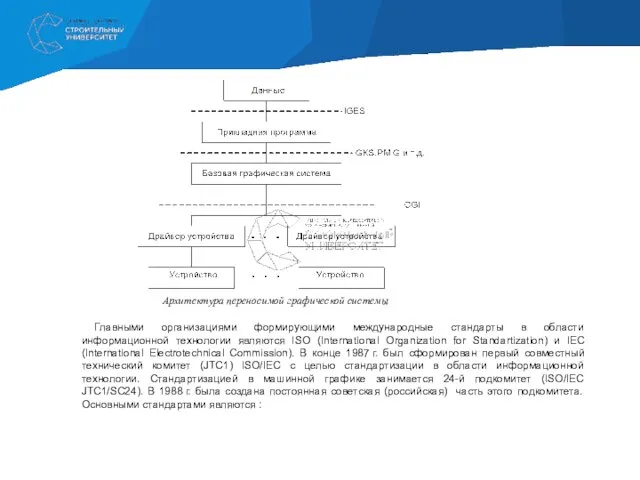
- 149. Архитектура переносимой графической системы Главными организациями формирующими международные стандарты в области информационной технологии являются ISO (International
- 150. Основными стандартами являются : 1. GKS (Graphical Kernel System) - набор базовых функций для 2D аппаратно-независимой
- 151. Стандарты компьютерной графики БАЗОВЫЕ СТАНДАРТЫ (GKS, CORE, PHIGS, CGI и др.) ГРАФИЧЕКИЕ ПРОТОКОЛЫ : аппаратно-зависимые (TEKTRONIX.
- 152. Core-System Существенным этапом в области стандартизации машинной графики явилась публикация проекта стандарта CORE-SYSTEM (GSPC-77). Главные идеи,
- 153. Набор примитивов GKS подобен набору примитивов CORE, хотя меньше и несколько более приспособлен для целей растровой
- 154. Принципиальное отличие PHIGS от GKS состоит в том, что в PHIGS создание и отображение изображения разделены
- 155. Графические протоколы Анализ применяемых в настоящее время графических протоколов и проектов по их стандартизации позволяет выделить
- 156. Наиболее распространенные представители – языки PostScript и PCL. 3. Аппаратно-независимые графические протоколы Аппаратно-независимый графический протокол или
- 157. Технические средства компьютерной графики Технические средства компьютерной графики: устройства ввода и устройства вывода
- 159. Скачать презентацию
Г л а в а 1. ВВЕДЕНИЕ, БАЗОВЫЕ ПОНЯТИЯ
И ОПРЕДЕЛЕНИЯ
Важнейшая
Г л а в а 1. ВВЕДЕНИЕ, БАЗОВЫЕ ПОНЯТИЯ
И ОПРЕДЕЛЕНИЯ
Важнейшая
Основные области применения компьютерной графики:
Конструкторская графика (автоматизация проектно-конструкторских работ)
Иллюстративная графика
Деловая графика
Научная
Основные области применения компьютерной графики:
Конструкторская графика (автоматизация проектно-конструкторских работ)
Иллюстративная графика
Деловая графика
Научная
Базовые понятия КГ
Графический примитив
Мировая система координат
Пользовательская система координат
Нормированная система координат
Графический примитив
Мировая система координат
Пользовательская система координат
Нормированная система координат
Г л а в а 2. ОСНОВНЫЕ СПОСОБЫ ОРГАНИЗАЦИИ
ГРАФИЧЕСКИХ ДАННЫХ
2.1.
Г л а в а 2. ОСНОВНЫЕ СПОСОБЫ ОРГАНИЗАЦИИ
ГРАФИЧЕСКИХ ДАННЫХ
2.1.
Следующий уровень иерархии - объекты, представляющие собой разнообразные векторные формы. В
Следующий уровень иерархии - объекты, представляющие собой разнообразные векторные формы. В
Отдельными элементами векторной графики являются:
Заливка (штриховка) – это цвет или узор,
Заливка (штриховка) – это цвет или узор,
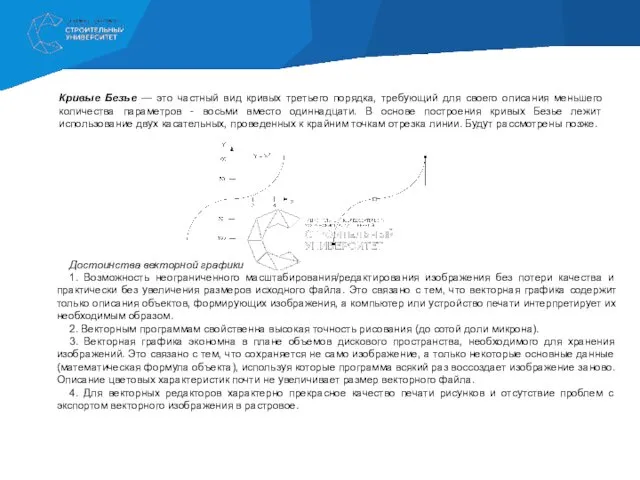
Кривые Безъе — это частный вид кривых третьего порядка, требующий для
Кривые Безъе — это частный вид кривых третьего порядка, требующий для
Недостатки
1. Практически невозможно осуществить экспорт изображения из растрового формата в
Недостатки
1. Практически невозможно осуществить экспорт изображения из растрового формата в
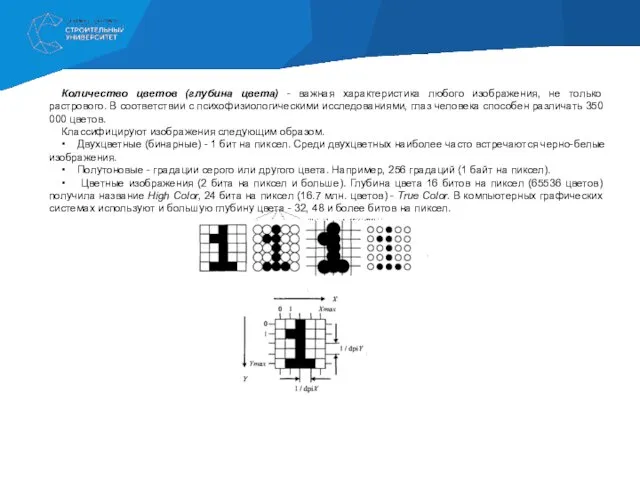
Количество цветов (глубина цвета) - важная характеристика любого изображения, не только
Количество цветов (глубина цвета) - важная характеристика любого изображения, не только
Методы улучшения растровых изображений
Устранение ступенчатого эффекта
В растровых системах при невысокой разрешающей
Методы улучшения растровых изображений
Устранение ступенчатого эффекта
В растровых системах при невысокой разрешающей
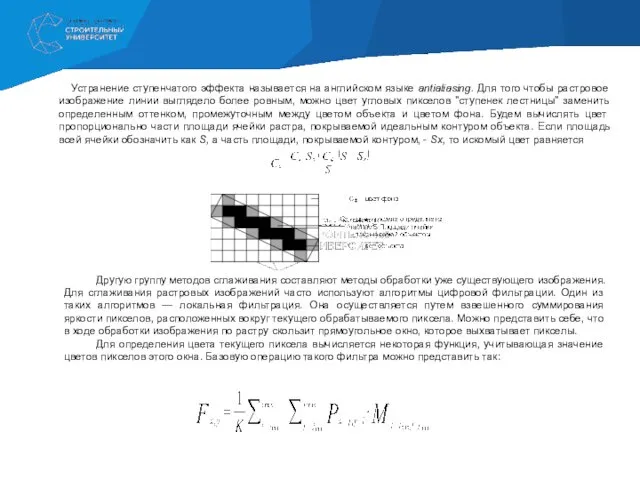
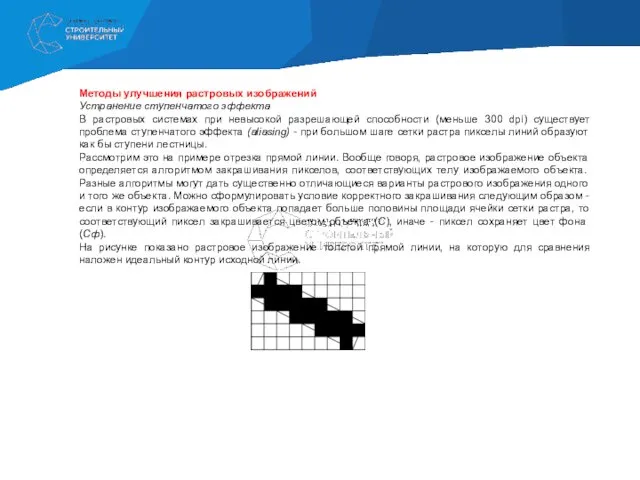
Устранение ступенчатого эффекта называется на английском языке antialiasing. Для того чтобы
Устранение ступенчатого эффекта называется на английском языке antialiasing. Для того чтобы
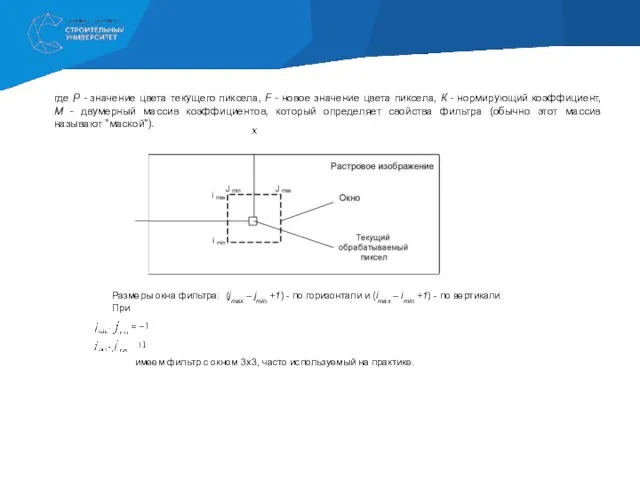
где Ρ - значение цвета текущего пиксела, F - новое значение
где Ρ - значение цвета текущего пиксела, F - новое значение
Если графическое устройство (устройство вывода) не способно воссоздавать достаточное количество цветов,
Если графическое устройство (устройство вывода) не способно воссоздавать достаточное количество цветов,
где С1 и С2 - цвета, которые графическое устройство непосредственно способно
где С1 и С2 - цвета, которые графическое устройство непосредственно способно
а также как y =F(x):
)
В зависимости от угла наклона прямой выполняется
а также как y =F(x):
)
В зависимости от угла наклона прямой выполняется
Инкрементные алгоритмы выполняются как последовательное вычисление координат соседних пикселов путем добавления
Инкрементные алгоритмы выполняются как последовательное вычисление координат соседних пикселов путем добавления
Инструменты растровых графических пакетов
К фундаментальным инструментам растровой графики относятся такие инструменты
Инструменты растровых графических пакетов
К фундаментальным инструментам растровой графики относятся такие инструменты
Таким образом, под термином выделение (или выделенная область) будем понимать области
Таким образом, под термином выделение (или выделенная область) будем понимать области
Ретушь
Bнструменты ретуширования изображений предназначены для восстановления поврежденных изображений, например, для ретуши
Ретушь
Bнструменты ретуширования изображений предназначены для восстановления поврежденных изображений, например, для ретуши
Гистограммы
Инструмент Гистограмма (Histogram) позволяет оценить разброс между минимальной и максимальной
Гистограммы
Инструмент Гистограмма (Histogram) позволяет оценить разброс между минимальной и максимальной
Параметрами раздела Выходные уровни (Output Levels) можно управлять точно так же,
Параметрами раздела Выходные уровни (Output Levels) можно управлять точно так же,
Цветовая коррекция и цветовой баланс
См. подраздел «Цветовые модели в КГ
Фильтры
Цветовая коррекция и цветовой баланс
См. подраздел «Цветовые модели в КГ
Фильтры
Пример 1. Алгоритм работы фильтра Размывание
1. При подготовке к размыванию
Пример 1. Алгоритм работы фильтра Размывание
1. При подготовке к размыванию
Недостатки
Объем файла точечной графики однозначно определяется произведением площади изображения на
Недостатки
Объем файла точечной графики однозначно определяется произведением площади изображения на
2. Математические фракталы
Фракталом Мандельброта названа фигура, которая порождается очень простым циклом.
2. Математические фракталы
Фракталом Мандельброта названа фигура, которая порождается очень простым циклом.
Фрактал Жулиа совсем не похож на фрактал Мандельброта, однако, он определяется
Фрактал Жулиа совсем не похож на фрактал Мандельброта, однако, он определяется
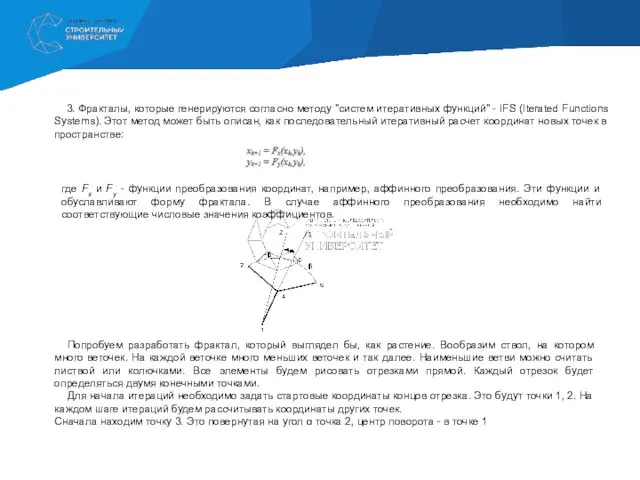
3. Фракталы, которые генерируются согласно методу "систем итеративных функций" - IFS
3. Фракталы, которые генерируются согласно методу "систем итеративных функций" - IFS
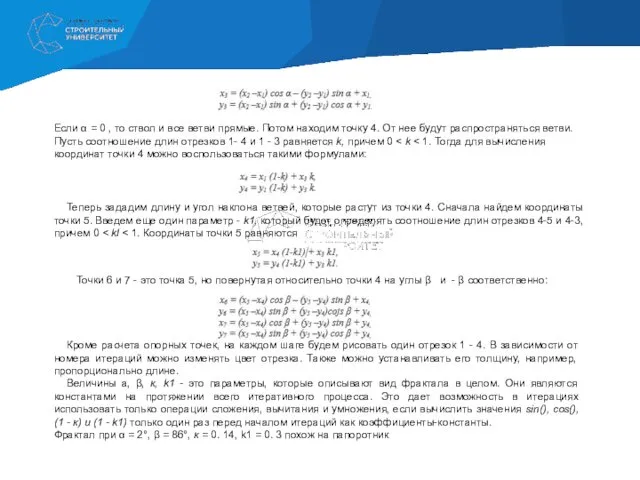
Если α = 0 , то ствол и все ветви прямые.
Если α = 0 , то ствол и все ветви прямые.
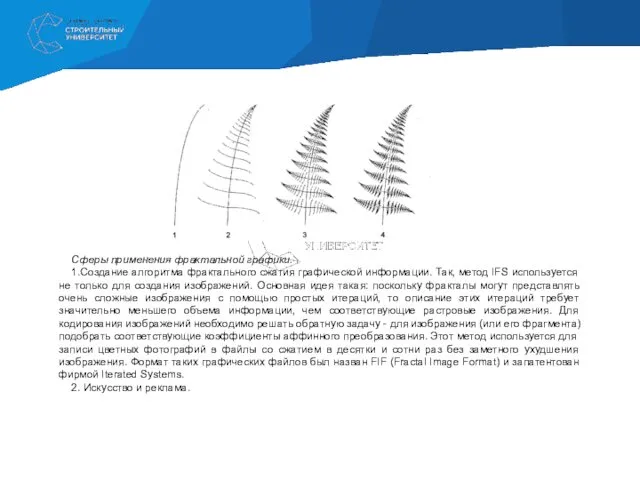
Сферы применения фрактальной графики.
1.Создание алгоритма фрактального сжатия графической информации. Так,
Сферы применения фрактальной графики.
1.Создание алгоритма фрактального сжатия графической информации. Так,
Преимущества и недостатки фрактальной графики
Достоинства
Качественный, легко реализуемый математический аппарат.
Преимущества и недостатки фрактальной графики
Достоинства
Качественный, легко реализуемый математический аппарат.
Г л а в а 3. Методы, модели и алгоритмы создания
Г л а в а 3. Методы, модели и алгоритмы создания
Для КГ принципиальным, и чаще всего программно-реализуемым является класс плоских геометрических
Для КГ принципиальным, и чаще всего программно-реализуемым является класс плоских геометрических
Параллельные проекции делятся на два типа в зависимости от соотношения между направлением
Параллельные проекции делятся на два типа в зависимости от соотношения между направлением
Наиболее широко используемыми видами ортографических проекций является вид спереди, вид сверху(план)
Наиболее широко используемыми видами ортографических проекций является вид спереди, вид сверху(план)
Изометрическая проекция — это разновидность аксонометрической проекции, при которой в отображении
Изометрическая проекция — это разновидность аксонометрической проекции, при которой в отображении
Диметрические проекции получаются на плоскости аксонометрических проекций в том случае, если она
Диметрические проекции получаются на плоскости аксонометрических проекций в том случае, если она
Косоугольные (наклонные) проекции сочетают в себе свойства ортографических проекций (видов спереди, сверху
Косоугольные (наклонные) проекции сочетают в себе свойства ортографических проекций (видов спереди, сверху
В проекции Кавалье направление проецирования составляет с плоскостью угол 45°. В результате проекция
В проекции Кавалье направление проецирования составляет с плоскостью угол 45°. В результате проекция
Центральная проекция любой совокупности параллельных прямых, которые не параллельны проекционной плоскости, будет
Центральная проекция любой совокупности параллельных прямых, которые не параллельны проекционной плоскости, будет
Сеточное описание поверхностей
Полигональная сетка — это совокупность вершин, рёбер и граней, которые
Сеточное описание поверхностей
Полигональная сетка — это совокупность вершин, рёбер и граней, которые
Полигональные сетки могут быть представлены множеством способов, используя разные способы хранения
Полигональные сетки могут быть представлены множеством способов, используя разные способы хранения
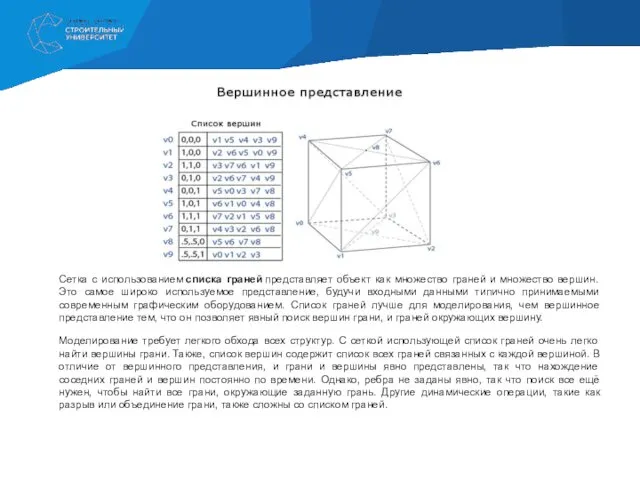
Сетка с использованием списка граней представляет объект как множество граней и множество вершин.
Сетка с использованием списка граней представляет объект как множество граней и множество вершин.
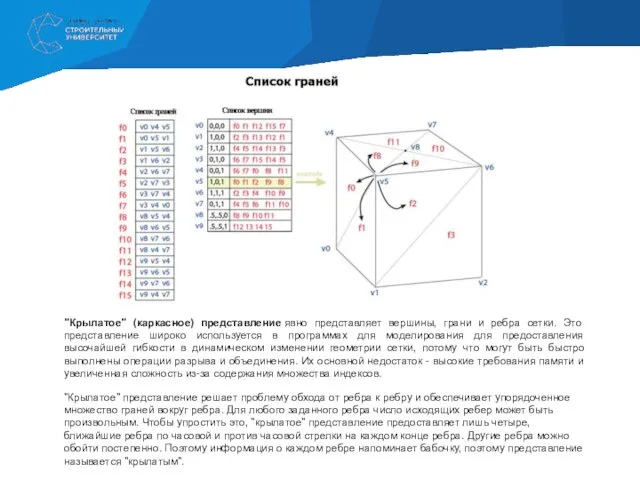
"Крылатое" (каркасное) представление явно представляет вершины, грани и ребра сетки. Это представление
"Крылатое" (каркасное) представление явно представляет вершины, грани и ребра сетки. Это представление

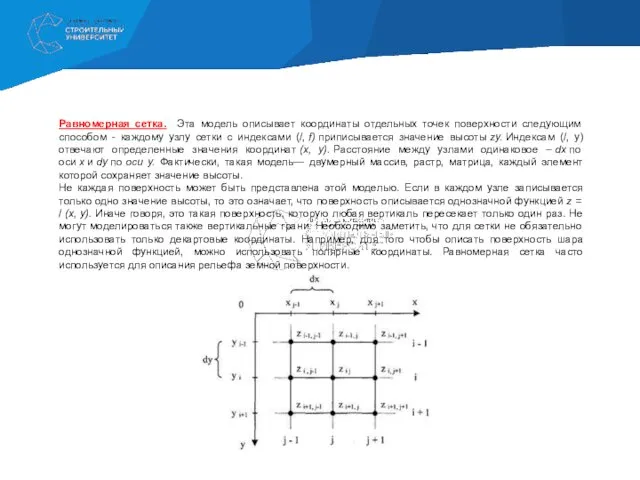
Равномерная сетка. Эта модель описывает координаты отдельных точек поверхности следующим способом
Неравномерной сеткой называется модель описания поверхности в виде множества отдельных точек
Неравномерной сеткой называется модель описания поверхности в виде множества отдельных точек
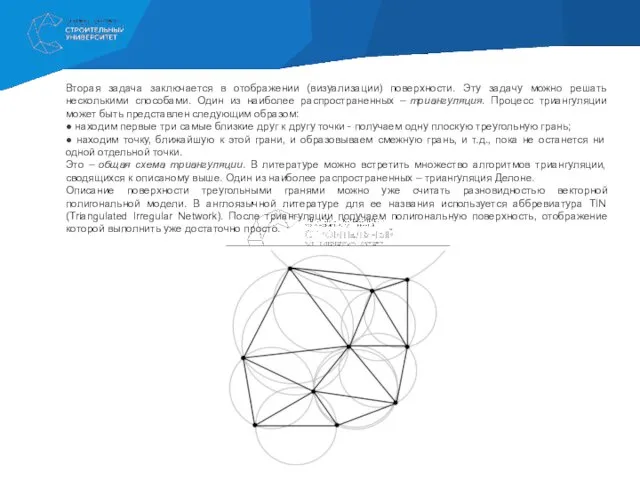
Вторая задача заключается в отображении (визуализации) поверхности. Эту задачу можно решать
Вторая задача заключается в отображении (визуализации) поверхности. Эту задачу можно решать
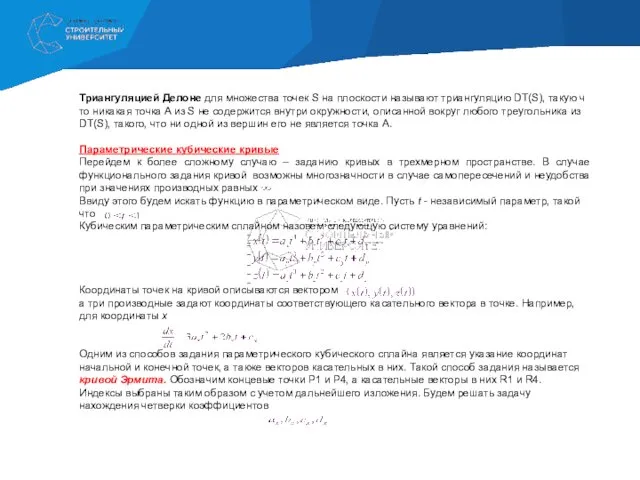
Триангуляцией Делоне для множества точек S на плоскости называют триангуляцию DT(S), такую что никакая точка A из S не содержится внутри окружности, описанной вокруг любого треугольника из DT(S), такого, что ни одной из вершин его не является точка A.
Параметрические кубические кривые
Перейдем к более сложному случаю – заданию кривых в
Триангуляцией Делоне для множества точек S на плоскости называют триангуляцию DT(S), такую что никакая точка A из S не содержится внутри окружности, описанной вокруг любого треугольника из DT(S), такого, что ни одной из вершин его не является точка A.
Параметрические кубические кривые
Перейдем к более сложному случаю – заданию кривых в
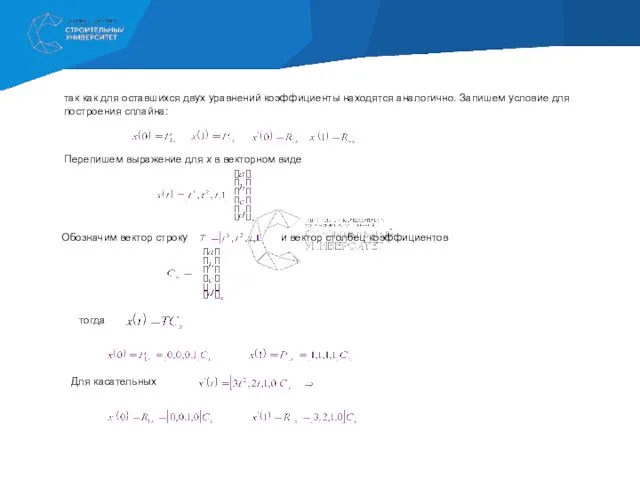
так как для оставшихся двух уравнений коэффициенты находятся аналогично. Запишем условие
так как для оставшихся двух уравнений коэффициенты находятся аналогично. Запишем условие
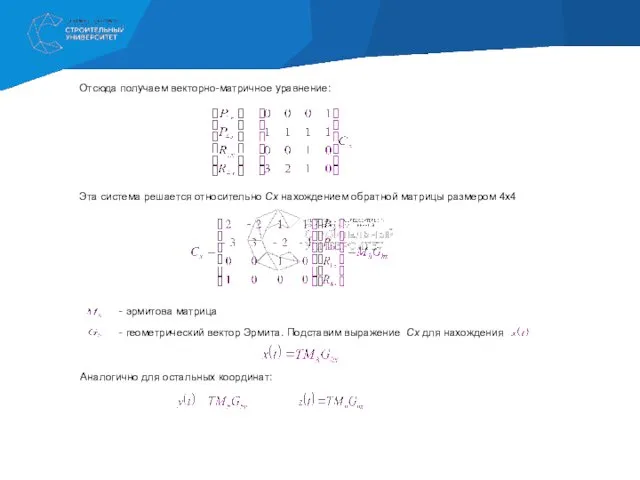
Отсюда получаем векторно-матричное уравнение:
Эта система решается относительно Сx нахождением обратной матрицы
Отсюда получаем векторно-матричное уравнение:
Эта система решается относительно Сx нахождением обратной матрицы
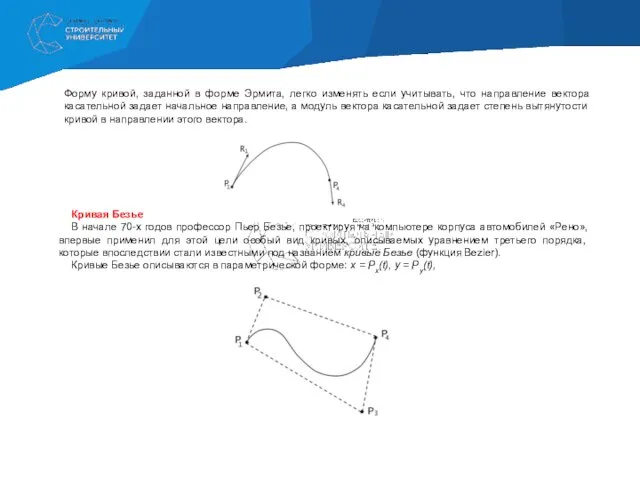
Форму кривой, заданной в форме Эрмита, легко изменять если учитывать, что
Форму кривой, заданной в форме Эрмита, легко изменять если учитывать, что
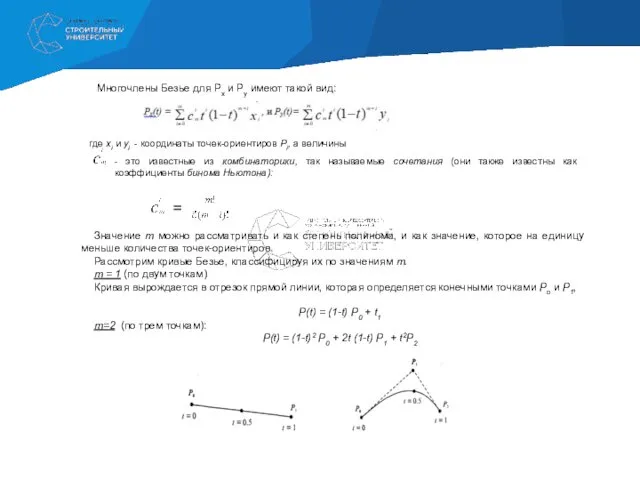
Многочлены Безье для Рx и Рy имеют такой вид:
где xi и
Многочлены Безье для Рx и Рy имеют такой вид:
где xi и
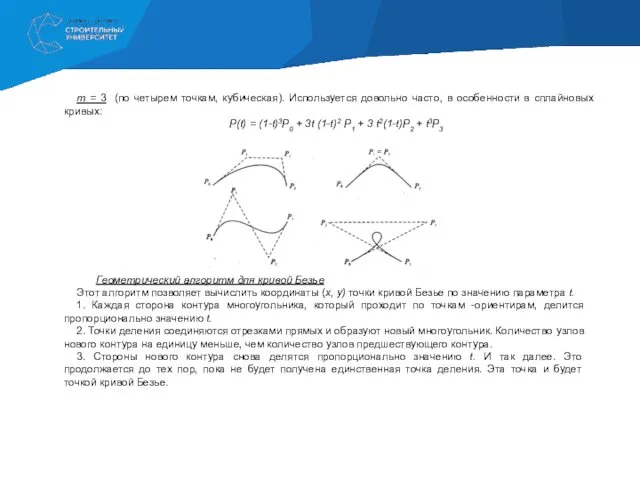
т = 3 (по четырем точкам, кубическая). Используется довольно часто, в
т = 3 (по четырем точкам, кубическая). Используется довольно часто, в

B-сплайны
Кривая, построенная на основе B-сплайн-базиса, описывается следующим образом
где
- радиус-вектор точек на
B-сплайны
Кривая, построенная на основе B-сплайн-базиса, описывается следующим образом
где
- радиус-вектор точек на
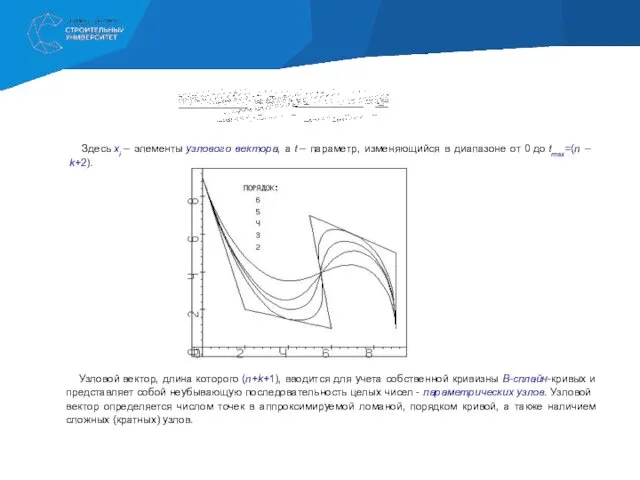
Здесь xi – элементы узлового вектора, а t – параметр, изменяющийся в диапазоне от 0 до tmax=(n – k+2).
Узловой
Здесь xi – элементы узлового вектора, а t – параметр, изменяющийся в диапазоне от 0 до tmax=(n – k+2).
Узловой
B-сплайн-кривая является полиномом степени (k–1) на каждом интервале (xi, xi+1) и что все ее производные
B-сплайн-кривая является полиномом степени (k–1) на каждом интервале (xi, xi+1) и что все ее производные
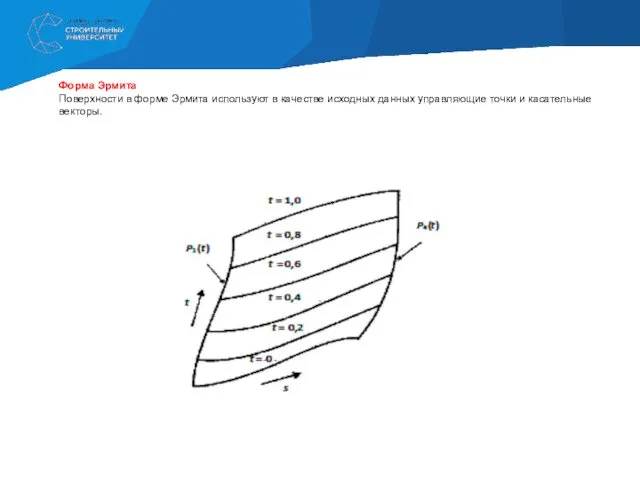
Форма Эрмита
Поверхности в форме Эрмита используют в качестве исходных данных управляющие
Форма Эрмита
Поверхности в форме Эрмита используют в качестве исходных данных управляющие
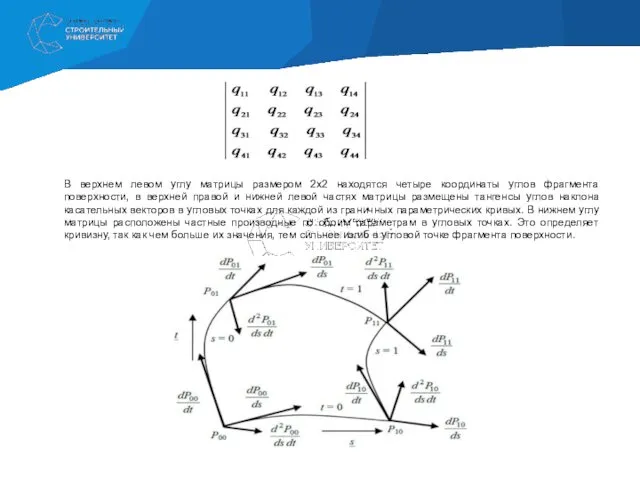
В верхнем левом углу матрицы размером 2x2 находятся четыре координаты углов
В верхнем левом углу матрицы размером 2x2 находятся четыре координаты углов
Поверхность Безье
Поверхности Безье используются часто при интерактивном проектировании по тем же
Поверхность Безье
Поверхности Безье используются часто при интерактивном проектировании по тем же
Поверхности в форме B-сплайнов
Как и для кривых в форме B-сплайнов, должна
Поверхности в форме B-сплайнов
Как и для кривых в форме B-сплайнов, должна
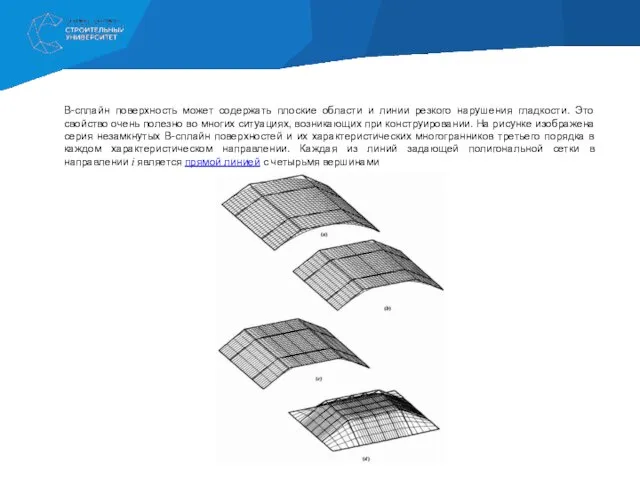
В-сплайн поверхность может содержать плоские области и линии резкого нарушения гладкости.
В-сплайн поверхность может содержать плоские области и линии резкого нарушения гладкости.
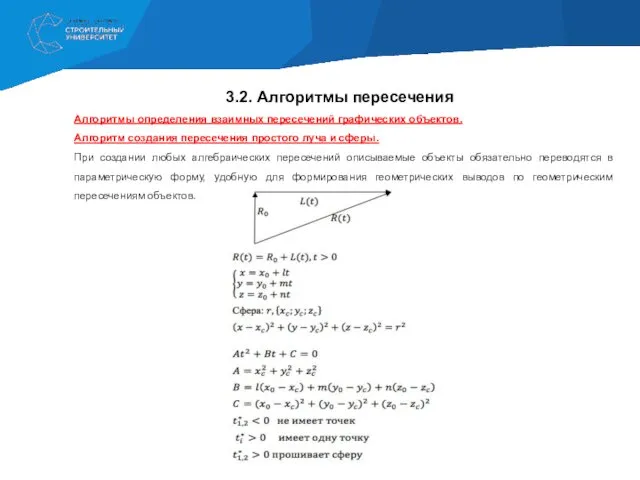
3.2. Алгоритмы пересечения
Алгоритмы определения взаимных пересечений графических объектов.
Алгоритм создания пересечения простого
3.2. Алгоритмы пересечения
Алгоритмы определения взаимных пересечений графических объектов.
Алгоритм создания пересечения простого
Алгоритм создания пересечения простого луча и сферы.
3.3. Алгоритмы упорядочения. Удаление
Алгоритм создания пересечения простого луча и сферы.
3.3. Алгоритмы упорядочения. Удаление
Сложность задачи удаления невидимых линий и поверхностей привела к появлению большого
Сложность задачи удаления невидимых линий и поверхностей привела к появлению большого
Алгоритмы удаления невидимых линий или поверхностей можно классифицировать по способу выбора
Алгоритмы удаления невидимых линий или поверхностей можно классифицировать по способу выбора
Алгоритм плавающего горизонта
Алгоритм плавающего горизонта можно отнести к классу алгоритмов, работающих
Алгоритм плавающего горизонта
Алгоритм плавающего горизонта можно отнести к классу алгоритмов, работающих
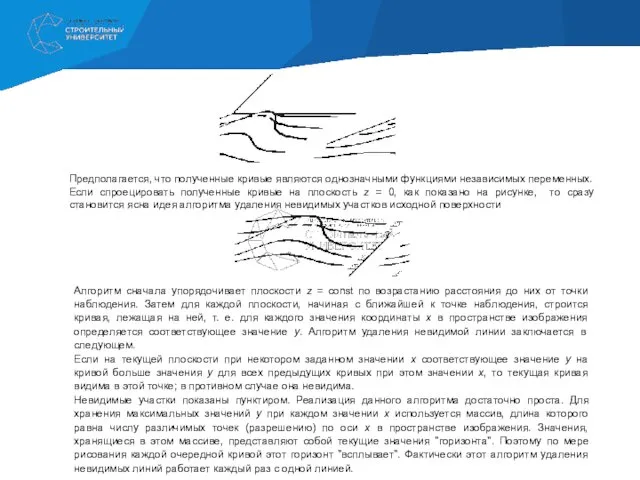
Предполагается, что полученные кривые являются однозначными функциями независимых переменных. Если спроецировать
Предполагается, что полученные кривые являются однозначными функциями независимых переменных. Если спроецировать
Алгоритм Робертса
Алгоритм Робертса представляет собой первое известное решение задачи об удалении
Алгоритм Робертса
Алгоритм Робертса представляет собой первое известное решение задачи об удалении
Удаление невидимых ребер
После первого этапа удаления нелицевых отрезков необходимо выяснить, существуют
Удаление невидимых ребер
После первого этапа удаления нелицевых отрезков необходимо выяснить, существуют
Алгоритм z–буфера
Алгоритм, использующий z-буфер - это один из простейших алгоритмов удаления
Алгоритм z–буфера
Алгоритм, использующий z-буфер - это один из простейших алгоритмов удаления
Другой недостаток алгоритма z-буфера состоит в трудоемкости и высокой стоимости устранения
Другой недостаток алгоритма z-буфера состоит в трудоемкости и высокой стоимости устранения
В результате определяется количественная невидимость всех ребер связной компоненты сцены, содержащей
В результате определяется количественная невидимость всех ребер связной компоненты сцены, содержащей
Алгоритм двоичного разбиения пространства
Скорость работы метода двоичного разбиения пространства достигается за
Алгоритм двоичного разбиения пространства
Скорость работы метода двоичного разбиения пространства достигается за
У нас есть плоскость (пространство), на которой расположены отрезки (участки гиперплоскостей)
У нас есть плоскость (пространство), на которой расположены отрезки (участки гиперплоскостей)
Теперь нужно рекурсивно повторить алгоритм для каждого поддерева. То есть, мы
Теперь нужно рекурсивно повторить алгоритм для каждого поддерева. То есть, мы
Зная исходное положение камеры (наблюдателя), нужно обойти все дерево по полигонам
Зная исходное положение камеры (наблюдателя), нужно обойти все дерево по полигонам
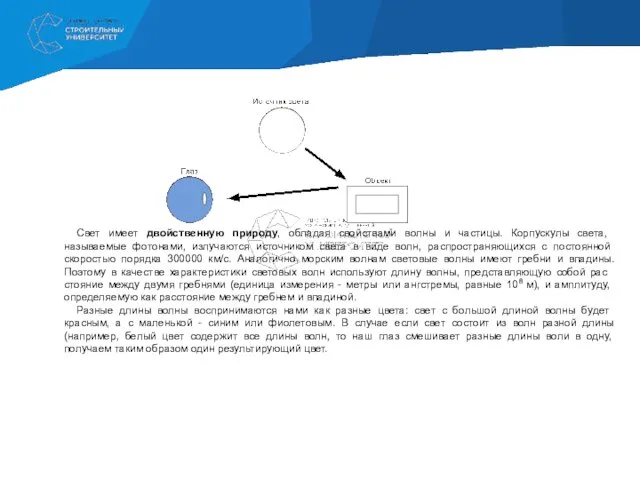
Свет имеет двойственную природу, обладая свойствами волны и частицы. Корпускулы света,
Свет имеет двойственную природу, обладая свойствами волны и частицы. Корпускулы света,
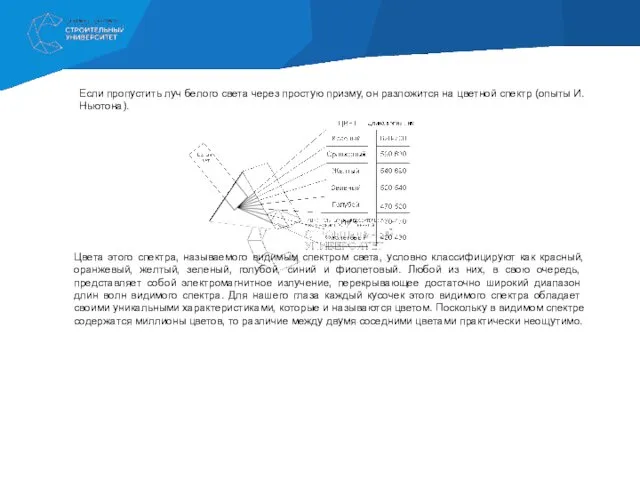
Если пропустить луч белого света через простую призму, он разложится на
Если пропустить луч белого света через простую призму, он разложится на
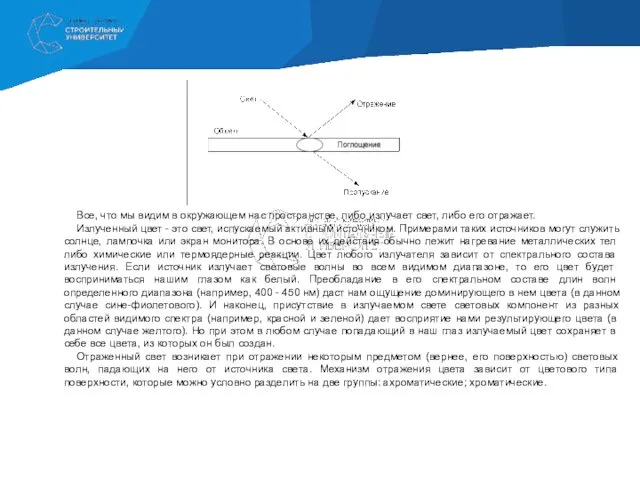
Все, что мы видим в окружающем нас пространстве, либо излучает свет,
Все, что мы видим в окружающем нас пространстве, либо излучает свет,
Первую группу составляют ахроматические (иначе бесцветные) цвета: черный, белый и все
Первую группу составляют ахроматические (иначе бесцветные) цвета: черный, белый и все
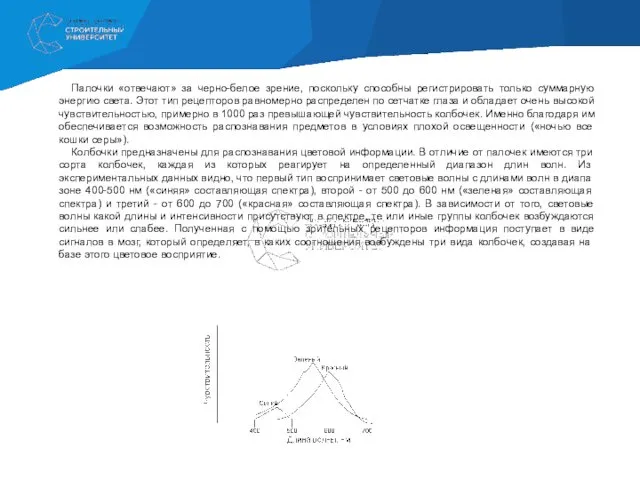
Палочки «отвечают» за черно-белое зрение, поскольку способны регистрировать только суммарную энергию
Палочки «отвечают» за черно-белое зрение, поскольку способны регистрировать только суммарную энергию
Для характеристики цвета используются следующие атрибуты.
1. Цветовой тон. Его можно определить
Для характеристики цвета используются следующие атрибуты.
1. Цветовой тон. Его можно определить
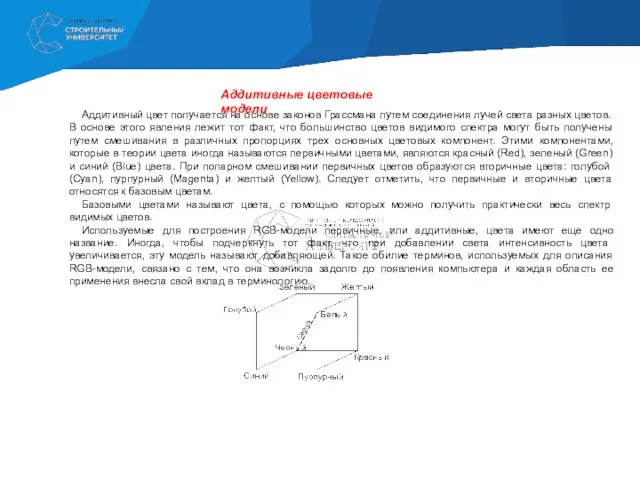
Аддитивные цветовые модели
Аддитивный цвет получается на основе законов Грассмана путем соединения
Аддитивные цветовые модели
Аддитивный цвет получается на основе законов Грассмана путем соединения
К настоящему времени система RGB - это официальный стандарт. Решением Международной
К настоящему времени система RGB - это официальный стандарт. Решением Международной
Нанесение желтой краски на белую бумагу означает, что поглощается отраженный синий
Нанесение желтой краски на белую бумагу означает, что поглощается отраженный синий
Существуют две наиболее распространенные версии субтрактивной модели: CMY и CMYK. Первая
Существуют две наиболее распространенные версии субтрактивной модели: CMY и CMYK. Первая
Цветовой тон
Как уже отмечалось, каждый реальный источник света воспроизводит его в
Цветовой тон
Как уже отмечалось, каждый реальный источник света воспроизводит его в
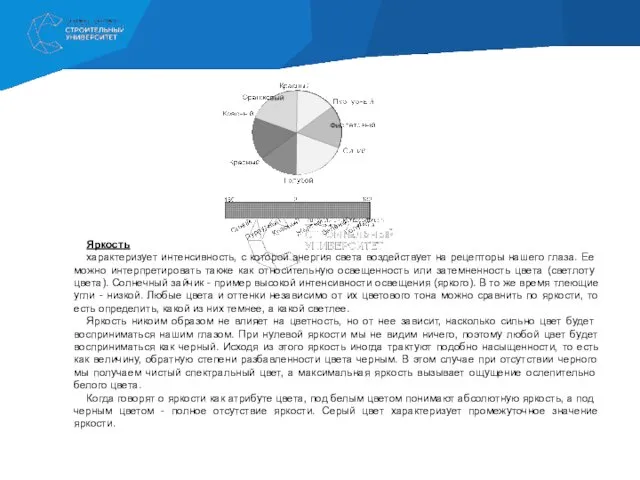
Яркость
характеризует интенсивность, с которой энергия света воздействует на рецепторы нашего
Яркость
характеризует интенсивность, с которой энергия света воздействует на рецепторы нашего
Системы соответствия цветов
Для упрощения процедуры идентификации цвета ведущими фирмами, специализирующимися в
Системы соответствия цветов
Для упрощения процедуры идентификации цвета ведущими фирмами, специализирующимися в
С = 00000000 bbbbbbbb gggggggg rrrrrrrr.
Триадные и плашечные цвета
Для
С = 00000000 bbbbbbbb gggggggg rrrrrrrr.
Триадные и плашечные цвета
Для
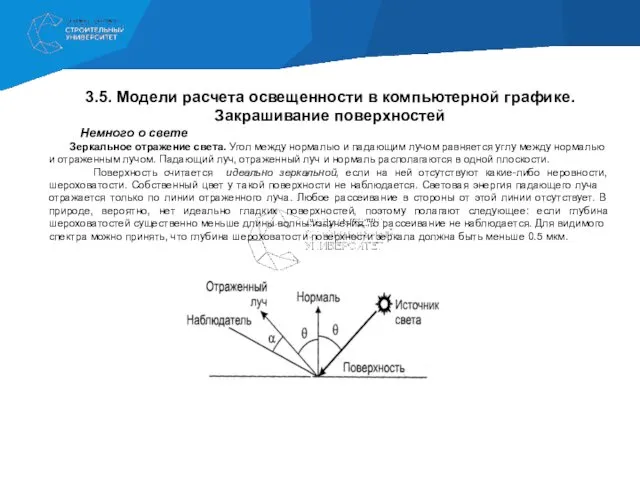
3.5. Модели расчета освещенности в компьютерной графике. Закрашивание поверхностей
Немного о
3.5. Модели расчета освещенности в компьютерной графике. Закрашивание поверхностей
Немного о
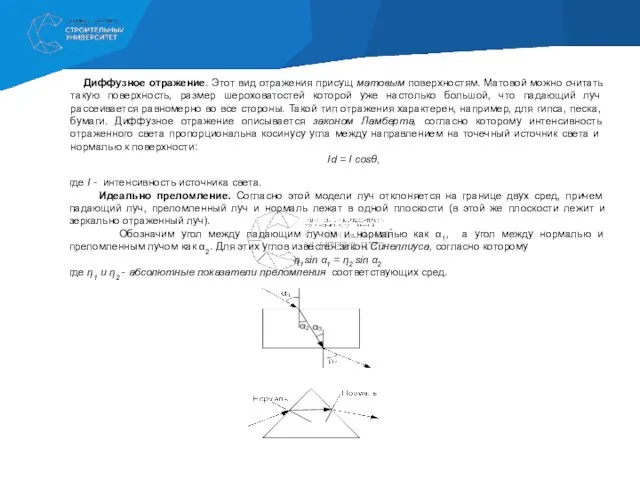
Диффузное отражение. Этот вид отражения присущ матовым поверхностям. Матовой можно считать
Диффузное отражение. Этот вид отражения присущ матовым поверхностям. Матовой можно считать
Метод Гуро
Этот метод предназначен для создания иллюзии гладкой криволинейной
Метод Гуро
Этот метод предназначен для создания иллюзии гладкой криволинейной

где I - интенсивность точечного источника света,
Is - интенсивность зеркально
где I - интенсивность точечного источника света,
Is - интенсивность зеркально
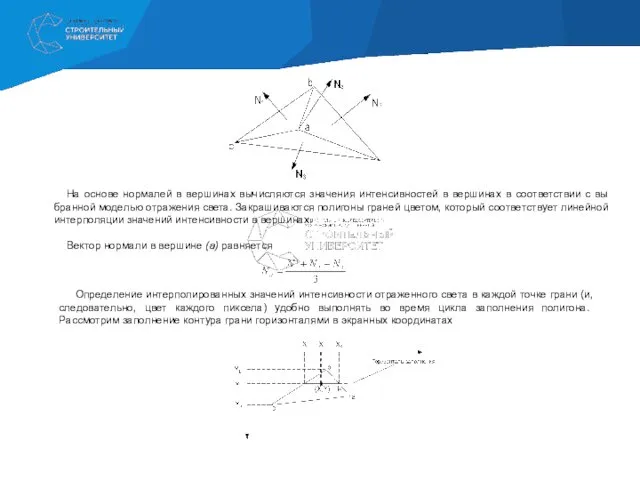
На основе нормалей в вершинах вычисляются значения интенсивностей в вершинах в
На основе нормалей в вершинах вычисляются значения интенсивностей в вершинах в

Интерполированная интенсивность I в точке (X, У) определяется, исходя из пропорции
откуда
Значение
Интерполированная интенсивность I в точке (X, У) определяется, исходя из пропорции
откуда
Значение
Метод Фонга
Фонг предложил вместо интерполяции интенсивностей произвести интерполяцию вектора
Метод Фонга
Фонг предложил вместо интерполяции интенсивностей произвести интерполяцию вектора
Трассировка лучей
Методы трассировки лучей (Ray Tracing) на сегодняшний день считаются
Трассировка лучей
Методы трассировки лучей (Ray Tracing) на сегодняшний день считаются
Непосредственная реализация данной лучевой модели формирования изображения представляется затруднительной. Можно попробовать
Непосредственная реализация данной лучевой модели формирования изображения представляется затруднительной. Можно попробовать
Алгоритмы трассировки носят характер рекурсивной процедуры, которая вызывает саму себя
Алгоритмы трассировки носят характер рекурсивной процедуры, которая вызывает саму себя
Положительные черты метода обратной трассировки:
● универсальность, применимость для синтеза изображений достаточно
Положительные черты метода обратной трассировки:
● универсальность, применимость для синтеза изображений достаточно
Метод излучательности
Алгоритм трассировки лучей плохо работает с диффузным отражением,
Метод излучательности
Алгоритм трассировки лучей плохо работает с диффузным отражением,
Fi,j ≈ (cosα1 * cosα1)/r2
Fi,j ≈ (cosα1 * cosα1)/r2
3.6. Анимация в компьютерной графике
Анимация - это создание зрительной
3.6. Анимация в компьютерной графике
Анимация - это создание зрительной
Для создания иллюзии механического движения достаточно перемещать (поворачивать) одни модели относительно
Для создания иллюзии механического движения достаточно перемещать (поворачивать) одни модели относительно
В качестве примера этого метода можно привести морфинг (термин происходит
В качестве примера этого метода можно привести морфинг (термин происходит
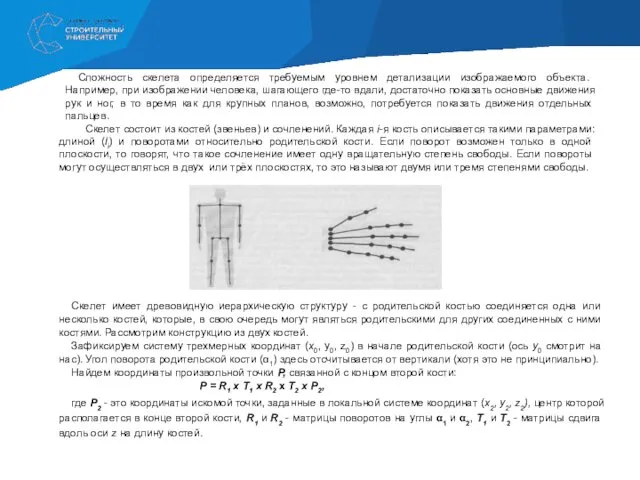
Сложность скелета определяется требуемым уровнем детализации изображаемого объекта. Например, при изображении
Сложность скелета определяется требуемым уровнем детализации изображаемого объекта. Например, при изображении
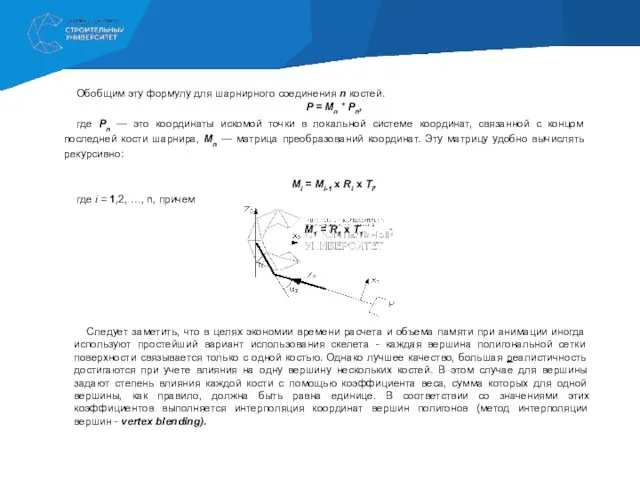
Обобщим эту формулу для шарнирного соединения n костей.
Р = Мп *
Обобщим эту формулу для шарнирного соединения n костей.
Р = Мп *
Как подмножество метода интерполяции вершин может рассматриваться vertex skinning - метод
Как подмножество метода интерполяции вершин может рассматриваться vertex skinning - метод
В соответствии с методом прямой кинематики (Forward Kinematics) управляя углами поворота
В соответствии с методом прямой кинематики (Forward Kinematics) управляя углами поворота
При использовании метода моделирования частиц (particles) создается набор частиц (часто в
При использовании метода моделирования частиц (particles) создается набор частиц (часто в
3.7. Текстурирование в компьютерной графике
Текстура представляет собой двумерное растровое
3.7. Текстурирование в компьютерной графике
Текстура представляет собой двумерное растровое
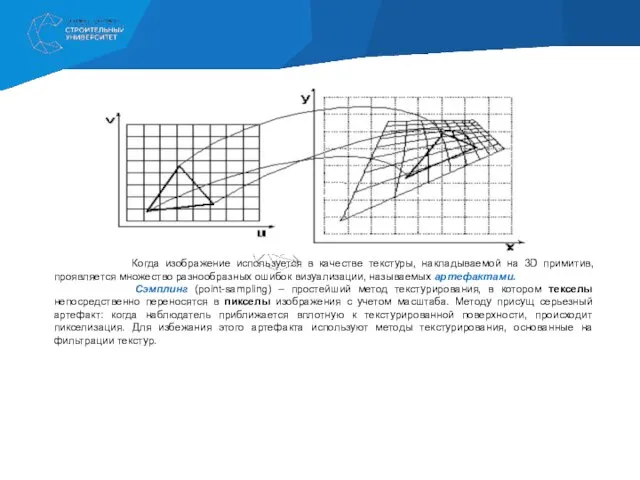
Когда изображение используется в качестве текстуры, накладываемой на 3D примитив,
Когда изображение используется в качестве текстуры, накладываемой на 3D примитив,
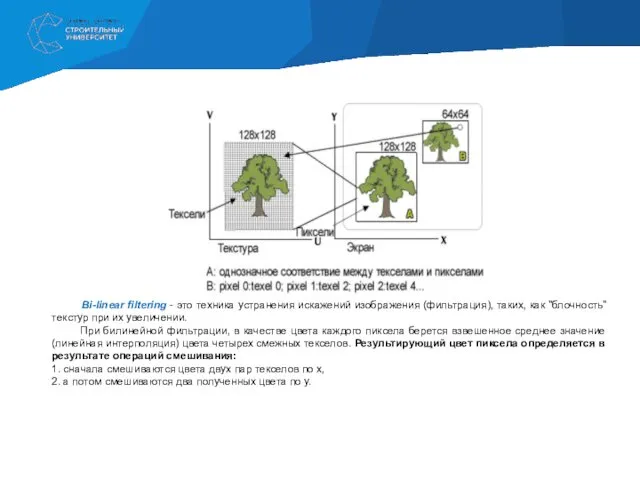
Bi-linear filtering - это техника устранения искажений изображения (фильтрация), таких,
Bi-linear filtering - это техника устранения искажений изображения (фильтрация), таких,
Существует класс артефактов наложения текстур известный под названием "depth aliasing«
Существует класс артефактов наложения текстур известный под названием "depth aliasing«
Для избежания ошибок "depth aliasing" используется техника, известная как mip-mapping.
Для избежания ошибок "depth aliasing" используется техника, известная как mip-mapping.
Объем MIP-текстуры:
Слева направо мы имеем MIP-map уровни детализации 0, 1, 2
Объем MIP-текстуры:
Слева направо мы имеем MIP-map уровни детализации 0, 1, 2
Проблемы Mip-текстурирования
В то время, как mip-текстурирование решает проблему ошибок
Проблемы Mip-текстурирования
В то время, как mip-текстурирование решает проблему ошибок
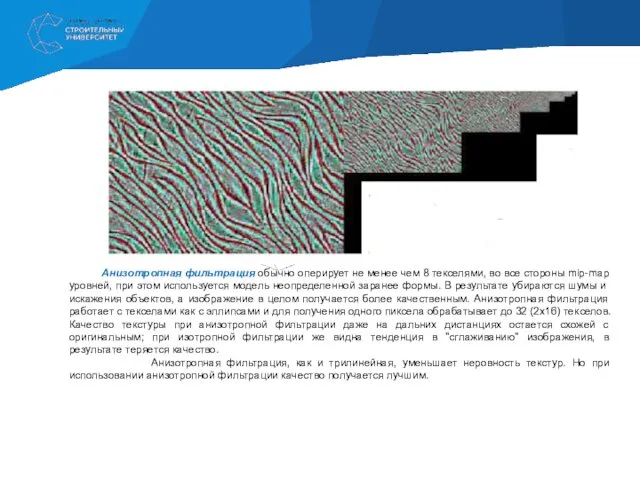
Анизотропная фильтрация обычно оперирует не менее чем 8 текселями, во
Анизотропная фильтрация обычно оперирует не менее чем 8 текселями, во

Г л а в а 4. ФОРМАТЫ ГРАФИЧЕСКИХ ФАЙЛОВ
Формат графического файла
Г л а в а 4. ФОРМАТЫ ГРАФИЧЕСКИХ ФАЙЛОВ
Формат графического файла
DXF (Drawing Exchange Format)
Формат DXF разработан фирмой AutoDesk в 1982 году
DXF (Drawing Exchange Format)
Формат DXF разработан фирмой AutoDesk в 1982 году
Общая структура файла DXF такая:
Коды группы:
Общая структура файла DXF такая:
Коды группы:
Каждая секция описывается так:
0
SECTION
……..(далее идут элементы секции)
0
ENDSEC
4.2. Растровые форматы
Растровые форматы служат
Каждая секция описывается так:
0
SECTION
……..(далее идут элементы секции)
0
ENDSEC
4.2. Растровые форматы
Растровые форматы служат
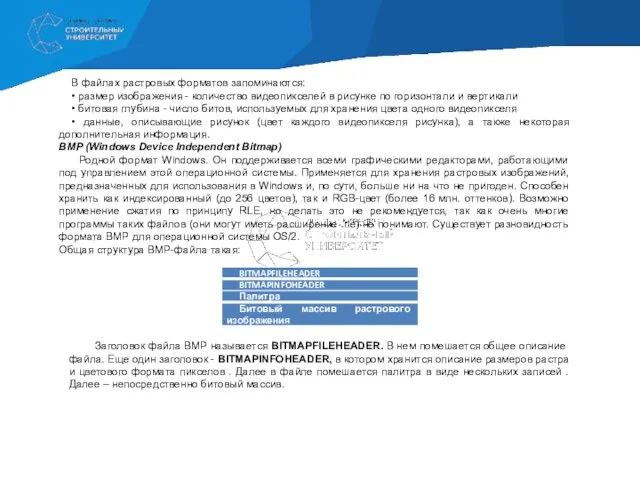
В файлах растровых форматов запоминаются:
• размер изображения - количество видеопикселей
В файлах растровых форматов запоминаются:
• размер изображения - количество видеопикселей
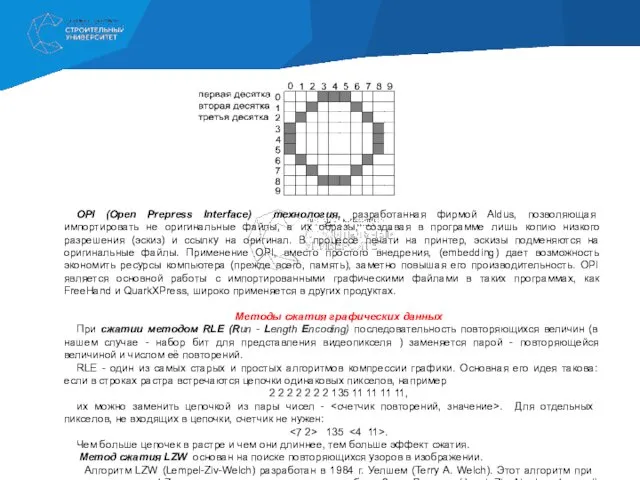
OPI (Open Prepress Interface) технология, разработанная фирмой Aldus, позволяющая импортировать не
OPI (Open Prepress Interface) технология, разработанная фирмой Aldus, позволяющая импортировать не
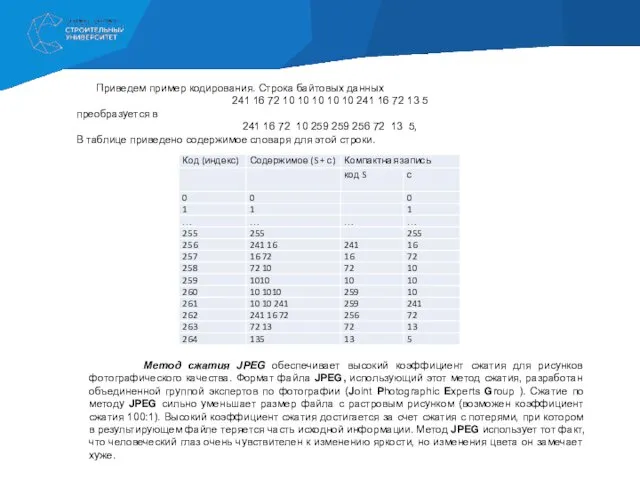
Приведем пример кодирования. Строка байтовых данных
241 16 72 10 10 10
Приведем пример кодирования. Строка байтовых данных
241 16 72 10 10 10
Поэтому при сжатии этим методом запоминается больше информации о разнице между
Поэтому при сжатии этим методом запоминается больше информации о разнице между
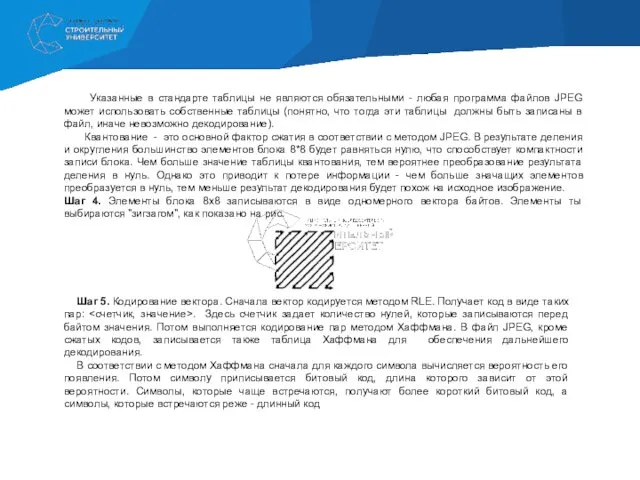
Указанные в стандарте таблицы не являются обязательными - любая программа
Указанные в стандарте таблицы не являются обязательными - любая программа
4.3. 3D-форматы
Предназначены для хранения данных 3d-геометрии. К форматам относятся VRML, 3DS,
4.3. 3D-форматы
Предназначены для хранения данных 3d-геометрии. К форматам относятся VRML, 3DS,
4.4. Форматы мультимедиа
Один из приемов, который используется при работе с видеоданными,
4.4. Форматы мультимедиа
Один из приемов, который используется при работе с видеоданными,
Формат видеофайлов MPEG (Motion Picture Experts Group), сжимающий видеофайлы по алгоритмам,
Формат видеофайлов MPEG (Motion Picture Experts Group), сжимающий видеофайлы по алгоритмам,
Формат QuickTime, разработанный фирмой Apple для операционных систем семейств Macintosh и
Формат QuickTime, разработанный фирмой Apple для операционных систем семейств Macintosh и

RTF (Microsoft Rich Text Format)
Текстовый формат RTF имеет неординарные способности к
RTF (Microsoft Rich Text Format)
Текстовый формат RTF имеет неординарные способности к
Г л а в а 5. СТАНДАРТИЗАЦИЯ В КОМПЬЮТЕРНОЙ ГРАФИКЕ
Основная цель
Г л а в а 5. СТАНДАРТИЗАЦИЯ В КОМПЬЮТЕРНОЙ ГРАФИКЕ
Основная цель
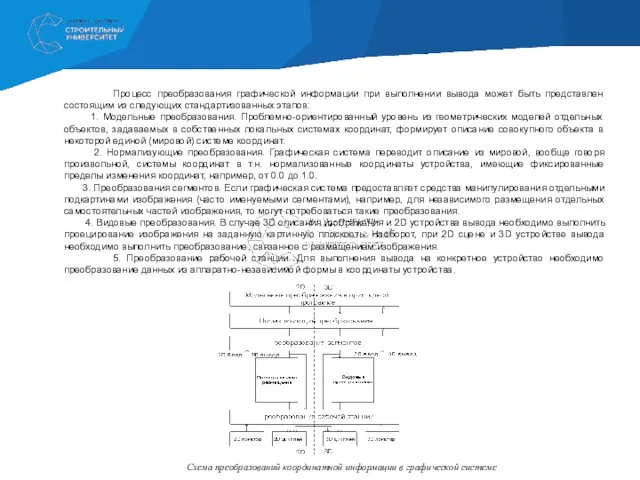
Процесс преобразования графической информации при выполнении вывода может быть представлен
Процесс преобразования графической информации при выполнении вывода может быть представлен
Архитектура переносимой графической системы
Главными организациями формирующими международные стандарты в области информационной
Архитектура переносимой графической системы
Главными организациями формирующими международные стандарты в области информационной
Основными стандартами являются :
1. GKS (Graphical Kernel System) - набор базовых
Основными стандартами являются :
1. GKS (Graphical Kernel System) - набор базовых
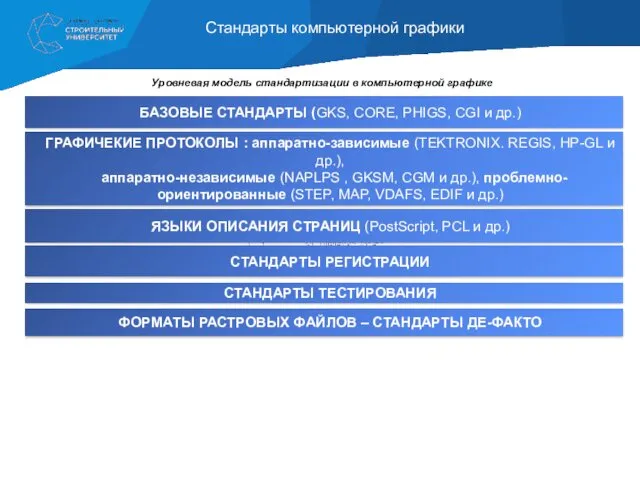
Стандарты компьютерной графики
БАЗОВЫЕ СТАНДАРТЫ (GKS, CORE, PHIGS, CGI и др.)
ГРАФИЧЕКИЕ ПРОТОКОЛЫ
Стандарты компьютерной графики
БАЗОВЫЕ СТАНДАРТЫ (GKS, CORE, PHIGS, CGI и др.)
ГРАФИЧЕКИЕ ПРОТОКОЛЫ
Core-System
Существенным этапом в области стандартизации машинной графики явилась публикация проекта стандарта
Core-System
Существенным этапом в области стандартизации машинной графики явилась публикация проекта стандарта
Набор примитивов GKS подобен набору примитивов CORE, хотя меньше и несколько
Набор примитивов GKS подобен набору примитивов CORE, хотя меньше и несколько
Принципиальное отличие PHIGS от GKS состоит в том, что в PHIGS
Принципиальное отличие PHIGS от GKS состоит в том, что в PHIGS
Графические протоколы
Анализ применяемых в настоящее время графических протоколов и проектов по
Графические протоколы
Анализ применяемых в настоящее время графических протоколов и проектов по
Наиболее распространенные представители – языки PostScript и PCL.
3. Аппаратно-независимые графические
Наиболее распространенные представители – языки PostScript и PCL.
3. Аппаратно-независимые графические

Технические средства компьютерной графики
Технические средства компьютерной графики: устройства ввода и устройства
Технические средства компьютерной графики
Технические средства компьютерной графики: устройства ввода и устройства
 Процесс создания картины. Натюрморт
Процесс создания картины. Натюрморт Деепричастие. Виды деепричастий
Деепричастие. Виды деепричастий Основы робототехники
Основы робототехники Натюрморт. Композиционное равновесие. Передача пространства
Натюрморт. Композиционное равновесие. Передача пространства Преобразование информации путем рассуждений
Преобразование информации путем рассуждений Особенности учета дров. Правила укладки и обмера, единицы учета, полнодревесность поленниц
Особенности учета дров. Правила укладки и обмера, единицы учета, полнодревесность поленниц Великие люди
Великие люди Сковорода гриль-газ
Сковорода гриль-газ История мыловарения.
История мыловарения. Остеохондроз позвоночника. Грыжа диска
Остеохондроз позвоночника. Грыжа диска История развития вычислительной техники
История развития вычислительной техники Спортивная игра Большие гонки
Спортивная игра Большие гонки Героическая профессия - испытатель
Героическая профессия - испытатель Жалпы гигиена және экология Бөлменің радиациялық фоны.Радон мен оның өнімдерінің гигиеналық маңызы
Жалпы гигиена және экология Бөлменің радиациялық фоны.Радон мен оның өнімдерінің гигиеналық маңызы Презентация к уроку геометрии в 8 классе на тему Взаимное расположение прямой и окружности
Презентация к уроку геометрии в 8 классе на тему Взаимное расположение прямой и окружности Структура и текстура горных пород
Структура и текстура горных пород Генные препараты
Генные препараты Общие сведения о производстве сборных железобетонных изделий
Общие сведения о производстве сборных железобетонных изделий Нематериальные блага как объекты гражданских прав
Нематериальные блага как объекты гражданских прав Интерполирование и численное дифференцирование функций
Интерполирование и численное дифференцирование функций Проведение динамометрирования
Проведение динамометрирования Методическая разработка мастер-класса ИЗОНИТЬ
Методическая разработка мастер-класса ИЗОНИТЬ Русский язык на 4 февраля
Русский язык на 4 февраля Приобщение родителей и детей к здоровому образу жизни в совместной деятельности
Приобщение родителей и детей к здоровому образу жизни в совместной деятельности Российский рынок страхования. Динамика и тенденции
Российский рынок страхования. Динамика и тенденции Организация строительства экспозиционно-выставочного павильона Прорыв в Кировском районе Ленинградской области
Организация строительства экспозиционно-выставочного павильона Прорыв в Кировском районе Ленинградской области Транспорт Архангельской области и его воздействие на окружающую среду
Транспорт Архангельской области и его воздействие на окружающую среду Рынок труда
Рынок труда