- ОСНОВЫ ЭЛЕКТРОПРИВОДА

Содержание
- 2. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДА 1.Электропривод как система. Структурная схема современного электропривода
- 3. Рис. 1.1. Структурная схема автоматизированного электропривода ЭП - электрический преобразователь; ЭМП - электромеханический преобраз-тель; РД –
- 4. Электропривод имеет два канала - силовой и информационный. Силовой обеспечивает преобразование электрической энергии, поступающей из системы
- 5. Электрический преобразователь энергии (ЭП) преобразует энергию сети в энергию, подаваемую на двигатель. Электромеханический преобразователь (ЭМП) (двигатель)
- 6. Информационный канал включает в себя автоматизированную систему управления (АСУ), датчики и преобразователи информации (ДПИ), задающие устройства
- 7. В соответствии с ГОСТ, 16593-79 под ЭЛЕКТРОПРИВОДОМ понимается электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и
- 8. 2 .Классификация электроприводов Современная рабочая машина состоит из рабочего органа, передаточного механизма, двигателя и аппаратуры управления.
- 9. Для привода машин может использоваться сила человека (ручной и ножной привод), сила ветра и воды (водяной
- 10. ЭП классифицируется по признакам: По характеру движения По числу используемых двигателей По виду электрического силового преобразователя
- 11. По характеру движения ЭП: вращательного движения; поступательного движения. Скорость может быть регулируемой или нерегулируемой. Движение –
- 12. 2. По числу используемых двигателей: групповой, характеризующийся тем, что один двигатель приводит в движение несколько исполнительных
- 13. 3. По виду электрического силового преобразователя двигатели делятся на питаемые от: управляемых и неуправляемых выпрямителей, преобразующих
- 14. 4. По способу соединения двигателя с рабочим органом: редукторный; безредукторный; конструктивно интегрированный.
- 15. 5. По степени регулируемости: нерегулируемый; регулируемый. 6. По основному регулируемому параметру: регулируемый по скорости; регулируемый по
- 16. 7. По виду управления: с ручным управлением; с полуавтоматическим управлением; с замкнутой системой автоматического регулирования (САР)
- 17. По типу эл.двигателя Электропривод с двигателем постоянного тока Электропривод с двигателем переменного тока Асинхронные двигатели (с
- 18. 3. Общие требования к ЭПР Рассмотрим главные показатели качества, которые определяют общие требования к электроприводу производственных
- 19. Надежность Свойство электропривода выполнять заданные функции в соответствии с требованиями технических условий в течение определенного промежутка
- 20. ТОЧНОСТЬ Это свойство электропривода обеспечивать в допустимых пределах погрешности расположения и движения ведомых звеньев при определенных
- 21. БЫСТРОДЕЙСТВИЕ Способность электропривода реагировать на изменение задающего или возмущающего воздействия. Это свойство электропривода связано с качеством
- 22. ЭНЕРГЕТИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ЭЛЕКТРОПРИВОДА часто оценивается коэффициентом полезного действия - отношением полезно истраченной энергии к ее полному
- 24. Скачать презентацию
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДА
1.Электропривод как система. Структурная схема современного электропривода
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДА
1.Электропривод как система. Структурная схема современного электропривода
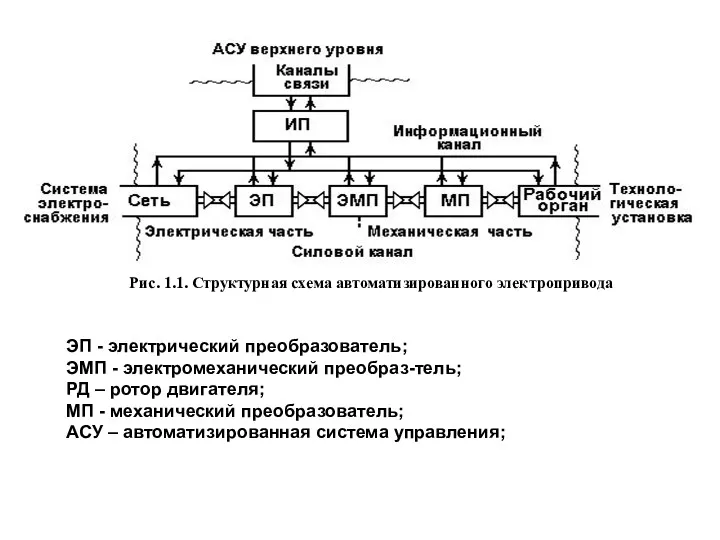
Рис. 1.1. Структурная схема автоматизированного электропривода
ЭП - электрический преобразователь;
ЭМП - электромеханический
Рис. 1.1. Структурная схема автоматизированного электропривода
ЭП - электрический преобразователь;
ЭМП - электромеханический
Электропривод имеет два канала - силовой и информационный.
Силовой обеспечивает преобразование
Электропривод имеет два канала - силовой и информационный.
Силовой обеспечивает преобразование
Электрический преобразователь энергии (ЭП) преобразует энергию сети в энергию, подаваемую на
Электрический преобразователь энергии (ЭП) преобразует энергию сети в энергию, подаваемую на
Информационный канал включает в себя автоматизированную систему управления (АСУ), датчики и
Информационный канал включает в себя автоматизированную систему управления (АСУ), датчики и
В соответствии с ГОСТ, 16593-79
под ЭЛЕКТРОПРИВОДОМ понимается электромеханическая система, состоящая
В соответствии с ГОСТ, 16593-79
под ЭЛЕКТРОПРИВОДОМ понимается электромеханическая система, состоящая
2 .Классификация электроприводов
Современная рабочая машина состоит из рабочего органа, передаточного механизма,
2 .Классификация электроприводов
Современная рабочая машина состоит из рабочего органа, передаточного механизма,
Для привода машин может использоваться сила человека (ручной и ножной привод),
Для привода машин может использоваться сила человека (ручной и ножной привод),
ЭП классифицируется по признакам:
По характеру движения
По числу используемых двигателей
По виду электрического
ЭП классифицируется по признакам:
По характеру движения
По числу используемых двигателей
По виду электрического
По характеру движения ЭП:
вращательного движения;
поступательного движения.
Скорость может быть регулируемой или нерегулируемой.
По характеру движения ЭП:
вращательного движения;
поступательного движения.
Скорость может быть регулируемой или нерегулируемой.
2. По числу используемых двигателей:
групповой, характеризующийся тем, что один двигатель приводит
2. По числу используемых двигателей:
групповой, характеризующийся тем, что один двигатель приводит
3. По виду электрического силового преобразователя двигатели делятся на питаемые от:
управляемых
3. По виду электрического силового преобразователя двигатели делятся на питаемые от:
управляемых
4. По способу соединения двигателя с рабочим органом:
редукторный;
безредукторный;
конструктивно интегрированный.
4. По способу соединения двигателя с рабочим органом:
редукторный;
безредукторный;
конструктивно интегрированный.
5. По степени регулируемости:
нерегулируемый;
регулируемый.
6. По основному регулируемому параметру:
регулируемый по скорости;
регулируемый
5. По степени регулируемости:
нерегулируемый;
регулируемый.
6. По основному регулируемому параметру:
регулируемый по скорости;
регулируемый
7. По виду управления:
с ручным управлением;
с полуавтоматическим управлением;
с замкнутой системой
7. По виду управления:
с ручным управлением;
с полуавтоматическим управлением;
с замкнутой системой
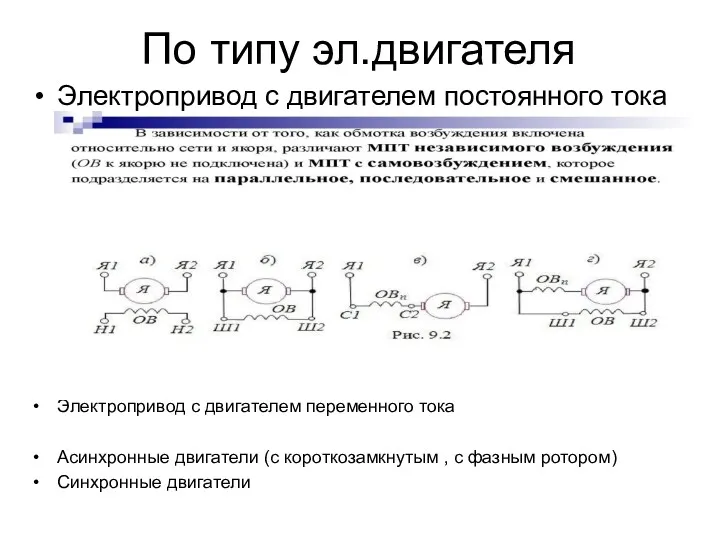
По типу эл.двигателя
Электропривод с двигателем постоянного тока
Электропривод с двигателем переменного тока
Асинхронные
По типу эл.двигателя
Электропривод с двигателем постоянного тока
Электропривод с двигателем переменного тока
Асинхронные
3. Общие требования к ЭПР
Рассмотрим главные показатели качества,
которые определяют общие требования
3. Общие требования к ЭПР
Рассмотрим главные показатели качества,
которые определяют общие требования
Надежность
Свойство электропривода выполнять заданные функции в соответствии с требованиями технических условий
Надежность
Свойство электропривода выполнять заданные функции в соответствии с требованиями технических условий
ТОЧНОСТЬ
Это свойство электропривода обеспечивать в допустимых пределах погрешности расположения и движения
ТОЧНОСТЬ
Это свойство электропривода обеспечивать в допустимых пределах погрешности расположения и движения
БЫСТРОДЕЙСТВИЕ
Способность электропривода реагировать на изменение задающего или возмущающего воздействия. Это свойство
БЫСТРОДЕЙСТВИЕ
Способность электропривода реагировать на изменение задающего или возмущающего воздействия. Это свойство
ЭНЕРГЕТИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ЭЛЕКТРОПРИВОДА
часто оценивается коэффициентом полезного действия - отношением полезно истраченной
ЭНЕРГЕТИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ЭЛЕКТРОПРИВОДА
часто оценивается коэффициентом полезного действия - отношением полезно истраченной
 Открытый урок технологии на тему: Работа с бумагой и картоном. Аппликация. Марийский народный орнамент. Диск
Открытый урок технологии на тему: Работа с бумагой и картоном. Аппликация. Марийский народный орнамент. Диск Презентация Родительское собрание для родителей будущих первоклассников
Презентация Родительское собрание для родителей будущих первоклассников Устройство и эксплуатация средств связи. Радиостанции малой мощности
Устройство и эксплуатация средств связи. Радиостанции малой мощности Чудо - тесто
Чудо - тесто Благодарность, смысл жизни. Сочинение на ОГЭ-2017. (Задание 15.3)
Благодарность, смысл жизни. Сочинение на ОГЭ-2017. (Задание 15.3) Профессия маляр
Профессия маляр Основные положения экономики землеустройства. (Тема 4)
Основные положения экономики землеустройства. (Тема 4) Mutual Funds: An Easy Way to Diversify
Mutual Funds: An Easy Way to Diversify Формирование имиджа работодателя
Формирование имиджа работодателя Древнерусская культура
Древнерусская культура Комбинаторика. Перестановки. Размещение. Сочетание
Комбинаторика. Перестановки. Размещение. Сочетание Творческий отчет Звездный путь
Творческий отчет Звездный путь Волшебная белая
Волшебная белая Презентация к химической викторине Пятый элемент
Презентация к химической викторине Пятый элемент Обучение грамоте 1 класс. Приём Раскраска
Обучение грамоте 1 класс. Приём Раскраска Готовимся к ГИА, 9 класс. Тест 5, часть 1
Готовимся к ГИА, 9 класс. Тест 5, часть 1 Финансовые институты как субъекты финансового рынка. Финансовые посредники
Финансовые институты как субъекты финансового рынка. Финансовые посредники Совершенствование системы управления персоналом на ООО ПластФактор
Совершенствование системы управления персоналом на ООО ПластФактор Чтение – один из главных способов обучения, развития, воспитания
Чтение – один из главных способов обучения, развития, воспитания Все на лыжи. Значение занятия лыжным спортом
Все на лыжи. Значение занятия лыжным спортом Организация профессиональной деятельности повара с разработкой технологии приготовления и оформления блюда утка фаршированная
Организация профессиональной деятельности повара с разработкой технологии приготовления и оформления блюда утка фаршированная Как выполнить задание вида Расставить коэффициенты в схемах реакций (8 класс)
Как выполнить задание вида Расставить коэффициенты в схемах реакций (8 класс) Презентация команды LatteOwl
Презентация команды LatteOwl Кубанское - значит качественное.
Кубанское - значит качественное. Сухие смеси
Сухие смеси Купола
Купола Однофазная цепь переменного тока
Однофазная цепь переменного тока Различные доминантные модальности и их влияние на речевое развитие.
Различные доминантные модальности и их влияние на речевое развитие.