- Основы конструирования лего-роботов

Содержание
- 2. Микроконтроллер К нему подключают двигатели (порты A, B, C) и датчики (1, 2, 3, 4) Связывается
- 3. Двигатель (Motor) Соединяется с блоком NXT в порты A, B, C. Регулируется: мощность вращения двигателя (0-100%)
- 4. Датчик нажатия (Touch sensor) Осязание робота Позволяет “нащупывать” путь (определять, есть ли перед ним препятствие) Может
- 5. Ультразвуковой датчик (Ultrasonic sensor) Работает по принципу локатора летучей мыши. Определяет расстояние до препятствия (от 0
- 6. Робот с ультразвуковым датчиком Робот может объезжать препятствия и двигать предметы
- 7. Датчик звука (Sound sensor) Определяет громкость звука Позволяет роботу “слышать” Помогает примерно определить направление на звук
- 8. Датчик света (Color Sensor) Позволяет роботу различать цвета и отличать свет от темноты Определяет уровень освещенности
- 9. Роботы с датчиком света Рука-манипулятор, определяющая цвет взятого шарика Робот, едущий по линии
- 10. Совместное использование датчиков Робот находит шары, пользуясь ультразвуковым датчиком и определяет их цвет, используя датчик цвета
- 11. Кабели Используются для соединения двигателей и датчиков с блоком NXT Три типа кабелей: 20 см, 35
- 12. Детали робота Балки Штифты Оси Шестеренки Колеса Прочие
- 13. Балки Основные компоненты корпуса робота Делятся на прямые и изогнутые (1 или 2 раза) Меряются по
- 14. Штифты Используются для соединения балок между собой и с другими деталями Бывают: двухмодульные трехмодульные крестообразные
- 15. Оси Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес Длина оси меряется в модулях:
- 16. Шестеренки Используются для передачи вращения с двигателя на колеса робота, а также для изменения мощности и
- 18. Скачать презентацию
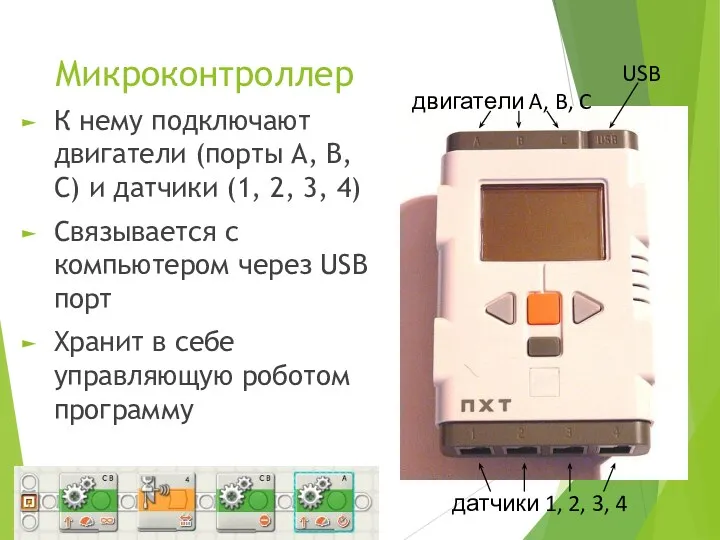
Микроконтроллер
К нему подключают двигатели (порты A, B, C) и датчики (1,
Микроконтроллер
К нему подключают двигатели (порты A, B, C) и датчики (1,

Двигатель (Motor)
Соединяется с блоком NXT в порты A, B, C.
Регулируется:
мощность
Двигатель (Motor)
Соединяется с блоком NXT в порты A, B, C.
Регулируется:
мощность

Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед
Датчик нажатия (Touch sensor)
Осязание робота
Позволяет “нащупывать” путь (определять, есть ли перед

Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние
Ультразвуковой датчик
(Ultrasonic sensor)
Работает по принципу локатора летучей мыши. Определяет расстояние

Робот с ультразвуковым датчиком
Робот может объезжать препятствия и двигать предметы
Робот с ультразвуковым датчиком
Робот может объезжать препятствия и двигать предметы

Датчик звука (Sound sensor)
Определяет громкость звука
Позволяет роботу “слышать”
Помогает примерно определить направление
Датчик звука (Sound sensor)
Определяет громкость звука
Позволяет роботу “слышать”
Помогает примерно определить направление

Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от
Датчик света (Color Sensor)
Позволяет роботу различать цвета и отличать свет от

Роботы с датчиком света
Рука-манипулятор, определяющая цвет взятого шарика
Робот, едущий по линии
Роботы с датчиком света
Рука-манипулятор, определяющая цвет взятого шарика
Робот, едущий по линии

Совместное использование датчиков
Робот находит шары, пользуясь ультразвуковым датчиком и определяет их
Совместное использование датчиков
Робот находит шары, пользуясь ультразвуковым датчиком и определяет их
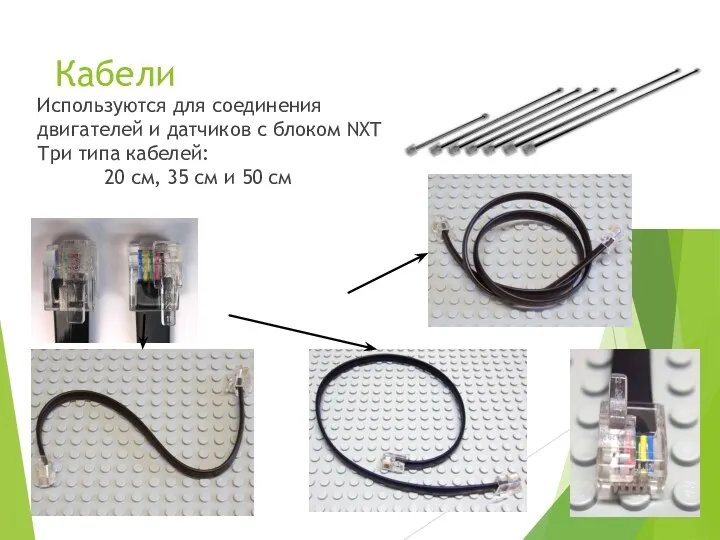
Кабели
Используются для соединения двигателей и датчиков с блоком NXT
Три типа кабелей:
Кабели
Используются для соединения двигателей и датчиков с блоком NXT
Три типа кабелей:

Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
Детали робота
Балки
Штифты
Оси
Шестеренки
Колеса
Прочие
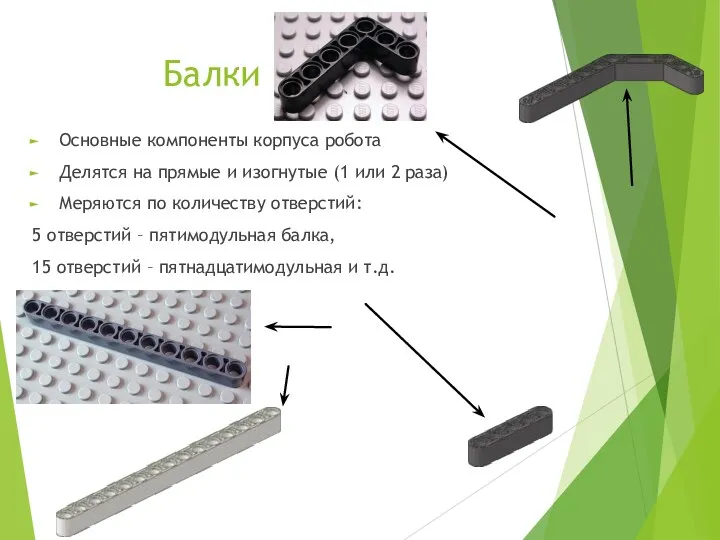
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2
Балки
Основные компоненты корпуса робота
Делятся на прямые и изогнутые (1 или 2
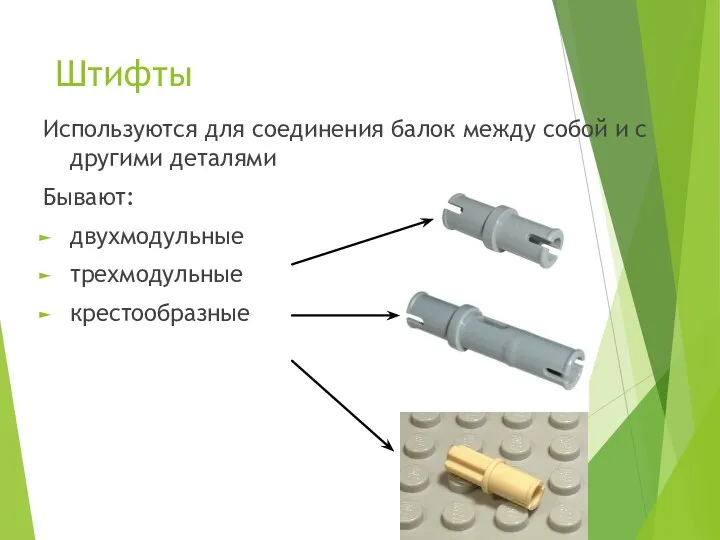
Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные
Штифты
Используются для соединения балок между собой и с другими деталями
Бывают:
двухмодульные
трехмодульные
крестообразные

Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси
Оси
Используются в основном для соединения вращающихся деталей: двигателей, шестеренок, колес
Длина оси

Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также
Шестеренки
Используются для передачи вращения с двигателя на колеса робота, а также
 Дифференциальная диагностика синдромов при патологии печени
Дифференциальная диагностика синдромов при патологии печени інформація проходження технологічної практики
інформація проходження технологічної практики Латеральное мышление (25)
Латеральное мышление (25) Панно из соломки
Панно из соломки Производство органопрепаратов из высушенных и обезжиренных органов животных, путем экстрагирования для внутреннего и инъекционного прим
Производство органопрепаратов из высушенных и обезжиренных органов животных, путем экстрагирования для внутреннего и инъекционного прим Особенности празднования Нового Года
Особенности празднования Нового Года Городской конкурс Учитель года 2014. 3 день. Разговор с учащимися.
Городской конкурс Учитель года 2014. 3 день. Разговор с учащимися. РАЗВИВАЮЩАЯ СРЕДА В 1 МЛАДШЕЙ ГРУППЕ
РАЗВИВАЮЩАЯ СРЕДА В 1 МЛАДШЕЙ ГРУППЕ Ребенок, как самоценность и его позиция в образовательном процессе. (Тема 8)
Ребенок, как самоценность и его позиция в образовательном процессе. (Тема 8) Nanotechnology. Nanofactors
Nanotechnology. Nanofactors Терроризм - угроза обществу
Терроризм - угроза обществу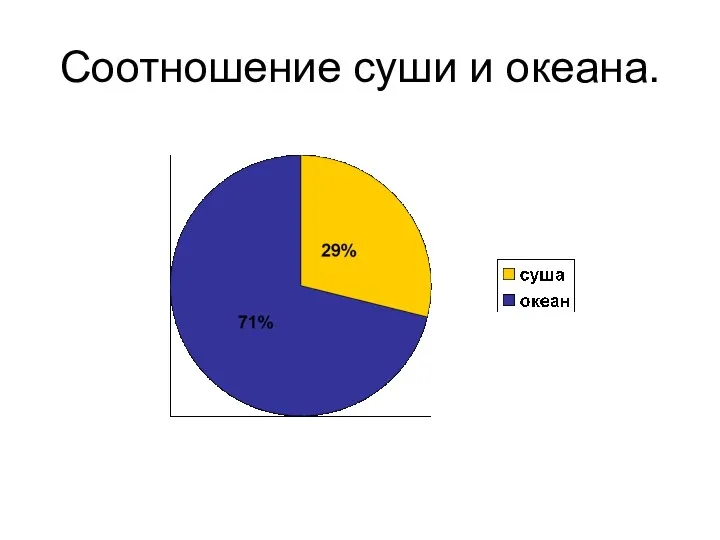 Гидросфера
Гидросфера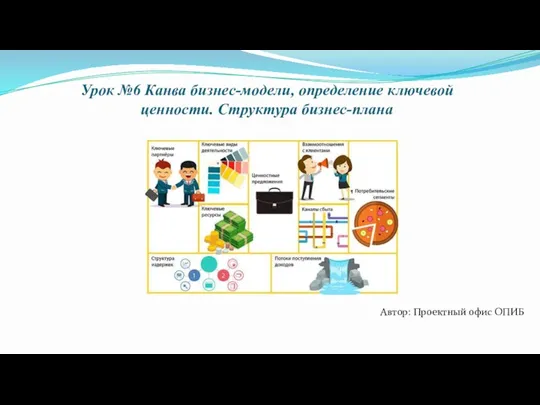 Канва бизнес-модели, определение ключевой ценности. Структура бизнес-плана
Канва бизнес-модели, определение ключевой ценности. Структура бизнес-плана Теоретические основы инновации
Теоретические основы инновации Портфолио
Портфолио Что такое Конституция?
Что такое Конституция? Основные климатические факторы и их воздействия на здания
Основные климатические факторы и их воздействия на здания Абдулла Алиш
Абдулла Алиш Аварии с выбором (угрозой выброса) радиоактивных веществ
Аварии с выбором (угрозой выброса) радиоактивных веществ Приоритетный проект Формирование современной городской среды на территории Новокузнецкого городского округа на 2017 год
Приоритетный проект Формирование современной городской среды на территории Новокузнецкого городского округа на 2017 год Технологическая база современной электроэнергетики
Технологическая база современной электроэнергетики Виробництво, його сутність та роль у житті суспільства. Тема 2
Виробництво, його сутність та роль у житті суспільства. Тема 2 Мастер отделочных строительных работ штукатур-маляр (строительный)
Мастер отделочных строительных работ штукатур-маляр (строительный)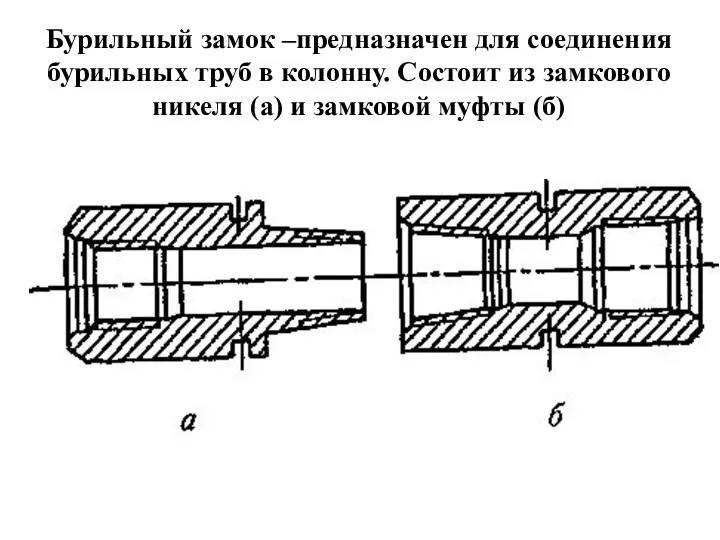 Оснастка бурильной колонны
Оснастка бурильной колонны Презентация Обогащение и активизация словаря детей 2-3 лет
Презентация Обогащение и активизация словаря детей 2-3 лет Эвенки
Эвенки Презентация Польша,11 класс
Презентация Польша,11 класс Оборотные средства предприятитя
Оборотные средства предприятитя