- Основы мехатроники и робототехники

Содержание
- 2. Виды занятий 16 лекций (х 2 час) 12 практических занятий (х 2 час) 12 лаб. работ
- 3. Основная литература Подураев Ю.В. Мехатроника: основы, методы, применение. М.: Машиностроение. 2007-2008 Робототехнические мехатронные системы: учебник /
- 4. Термин «Робот» Карел Чапек «RUR» (Россумовские универсальные роботы), 1921 Аналоги: «Работа», «Раб», «Рабочий» 1890 - 1938
- 5. Термин «Робот» Карел Чапек «RUR» (Россумовские универсальные роботы), 1921 Коллективная драма в трех действиях со вступительной
- 6. ТЕРМИН «РОБОТОТЕХНИКА» (Robotics) Введен писателем - фантастом Айзеком Азимовым в 1940-х годах (рассказы «Лжец» и др.)
- 7. ТРИ ЗАКОНА РОБОТОТЕХНИКИ Закон 1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы
- 8. Международная терминология робототехники ГОСТ Р 60.0.0.4−2018/ ISO 8373:2012 (проект, окончательная редакция)
- 9. Общие термины: РОБОТ Робот (Robot): Исполнительный механизм, программируемый по двум или более степеням подвижности, обладающий определенной
- 10. Две категории роботов
- 11. Две категории роботов Назначение - промышленная автоматизация: Производство Сборка Упаковка Другое Другое назначение
- 12. Две категории роботов https://new.abb.com/products/robotics IRB 1200
- 13. Интерфейс системы управления
- 14. Общие термины: СТЕПЕНЬ ПОДВИЖНОСТИ Степень подвижности: Параметр, используемый для задания поступательного или вращательного движения робота. Axis
- 15. Робот с прямоугольной системой координат Число степеней подвижности n = ?
- 16. Робот KUKA KR 500 https://www.eurobots.ru/kuka-robots-kr-500-2-p251-en.html Число степеней подвижности n = ?
- 17. Робот KUKA KR 500 ВИДЕО (Youtube): Simulation of the KUKA KR 500 Robot Robot KUKA KR
- 18. Общие термины: МАНИПУЛЯТОР Манипулятор (manipulator): Машина, механизм которой обычно состоит из последовательности сегментов, перемещающихся вращательно или
- 19. Общие термины: РАБОЧИЙ ОРГАН Рабочий орган (end effector): Устройство, специально разработанное для закрепления на механическом интерфейсе
- 20. РТК высокоскоростной съемки Промышленный робот ABB IRB 140 Высокоскоростная камера Miro 320 Устройство синхронизации Периферийное оборудование
- 21. РАБОЧИЕ ОРГАНЫ Захватное устройство для сброса объектов Устройство высыпания мелких объектов Выливное устройство для жидкостей
- 22. Особенность РТК Возможность движения камеры с ускорением свободного падения, как по линейным, так и по сложным
- 23. Степень свободы (degree of freedom, DOF): Одна из переменных (максимальное число которых равно шести), необходимых для
- 24. Степени свободы рабочего органа робота P
- 25. Робот LBR 4+ (фирма KUKA) Видео!! n = ? Роботы с избыточными степенями подвижности
- 26. Робот LBR 4+ (фирма KUKA) n =7 степеней подвижности Роботы с избыточными степенями подвижности
- 27. Экспериментальный стенд роботической биопечати эмали in situ
- 28. Скелет и кинематическая схема руки человека
- 29. Общие термины: СИСТЕМА УПРАВЛЕНИЯ Система управления (control system): Совокупность управляющей логики и силовых функций, позволяющих контролировать
- 30. Общие термины: АВТОНОМНОСТЬ Автономность (autonomy): Способность выполнять поставленное задание без вмешательства человека с учетом своего текущего
- 31. Международная терминология робототехники ГОСТ Р 60.0.0.4−2018/ ISO 8373:2012 (проект, окончательная редакция)
- 32. Общие термины: РОБОТ Робот (Robot): Исполнительный механизм, программируемый по двум или более степеням подвижности, обладающий определенной
- 33. Общие термины: РОБОТОТЕХНИЧЕСКОЕ УСТРОЙСТВО Робототехническое устройство (robotic device): Исполнительный механизм, обладающий характеристиками промышленного робота или сервисного
- 34. Общие термины: РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС Робототехнический комплекс (robot system): Комплекс, состоящий из одного или нескольких роботов, их
- 35. Робототехнический комплекс - РТК Включает в себя сам робот (группу роботов) и другое сопряженное технологическое оборудование
- 36. Определение промышленного робота (industrial robot) Автоматически управляемый, перепрограммируемый, реконфигурируемый манипулятор, программируемый по трем или более степеням
- 37. Определение сервисного робота (service robot) Робот, который выполняет задания, полезные для человека или оборудования, за исключением
- 38. Признаки классификации промышленных роботов Грузоподъемность Возможность передвижения Тип привода Способ установки на рабочем месте Выполняемая технологическая
- 39. - сверхлегкие – номин. грузоподъемность до 1 кг. - легкие – номин. грузоподъемность от 1 до
- 40. - стационарные промышленные роботы; - подвижные промышленные роботы. Возможность передвижения промышленных роботов
- 41. Тип привода промышленных роботов ПР с электромеханическими приводами. ПР с гидравлическими приводами. ПР с пневматическими приводами.
- 42. - напольные промышленные роботы; - подвесные промышленные роботы; - встроенные промышленные роботы. Способ установки на рабочем
- 43. - универсальные промышленные роботы – роботы, осуществляющие разные технологические операции в зависимости от установленного рабочего органа;
- 44. - обрабатывающие промышленные роботы – роботы, используемые при операциях механообработки (шлифовка, удаление заусенцев и т.п.); -
- 45. промышленные роботы с ручным управлением промышленные роботы с программным управлением промышленные роботы с адаптивным управлением ----------
- 46. - промышленные роботы, программируемые обучением; - промышленные роботы программируемые аналитически (автономное программирование); - промышленные роботы, программируемые
- 47. Программирование обучением (teach programming): Программирование, осуществляемое с помощью проведения вручную рабочего органа робота, либо проведения вручную
- 48. Автономное программирование (off-line programming): Способ программирования, при котором программа выполнения задания подготавливается на устройствах, отдельных от
- 49. SprutCAM —система подготовки управляющих программ для промышленных роботов на персональных компьютерах https://www.sprut.ru/products-and-solutions/products/sprutcam/robot-promo ВИДЕО: SprutCAM_ сварка (welding).mp4
- 50. промышленные роботы с прямоугольной системой координат промышленные роботы с цилиндрической системой координат промышленные роботы со сферической
- 51. Прямоугольная система координат
- 52. Прямоугольная система координат
- 53. Цилиндрическая система координат
- 54. Цилиндрическая система координат
- 55. Сферическая система координат
- 56. Сферическая система координат
- 57. Угловая система координат
- 58. Угловая система координат (типа SCARA) ВИДЕО: SCARA_MATLAB_program_demo.mp4
- 59. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1= L2 )
- 60. Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2 ).
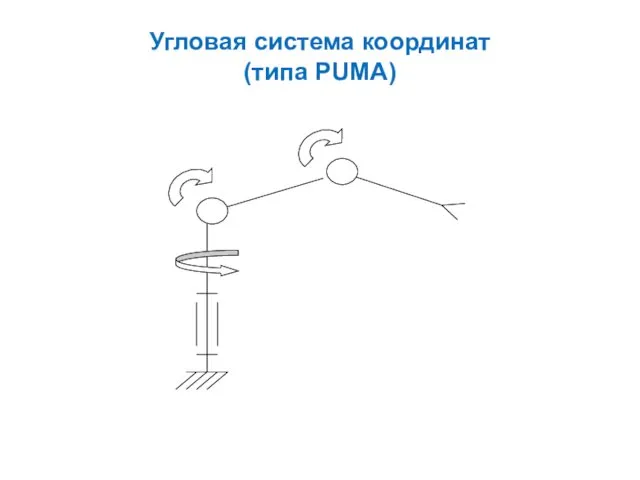
- 61. Угловая система координат (типа PUMA)
- 62. Угловая система координат (типа PUMA) ВИДЕО: Puma_Robot_560RobotPuma560207.3gp
- 63. Внедрение новых промышленных роботов (2008 – 2020) International Federation of Robotics https://ifr.org/
- 64. Общее количество внедренных ПР International Federation of Robotics https://ifr.org/
- 65. Перспективные области применения ПР International Federation of Robotics https://ifr.org/
- 66. Признаки классификации сервисных роботов Возможность передвижения - роботы мобильные - роботы стационарные Область применения - роботы
- 67. Сервисные роботы для личного и домашнего использования Роботы для домашней работы (уборка полов, стрижка газонов; чистка
- 68. Сервисные роботы для профессионального использования Медицинские роботы Роботы военного и специального назначения (воздушные - БПЛА, наземные
- 69. Состояние мирового рынка сервисной робототехники
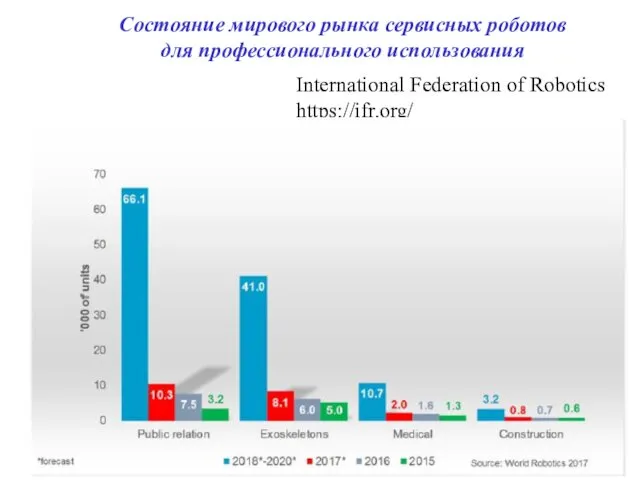
- 70. Состояние мирового рынка сервисных роботов для профессионального использования International Federation of Robotics https://ifr.org/
- 71. Состояние мирового рынка сервисных роботов для профессионального использования International Federation of Robotics https://ifr.org/
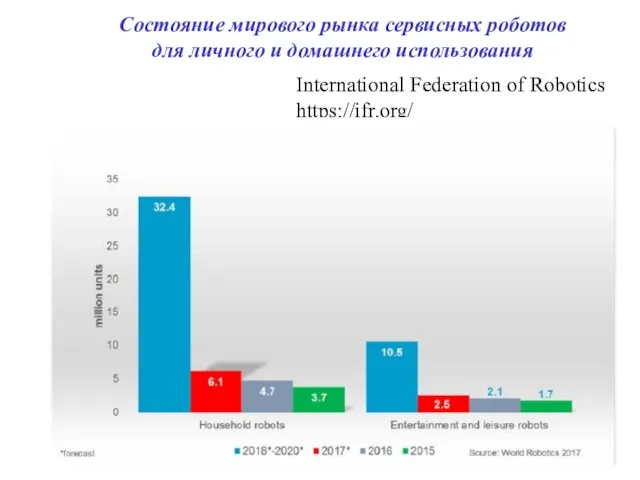
- 72. Состояние мирового рынка сервисных роботов для личного и домашнего использования International Federation of Robotics https://ifr.org/
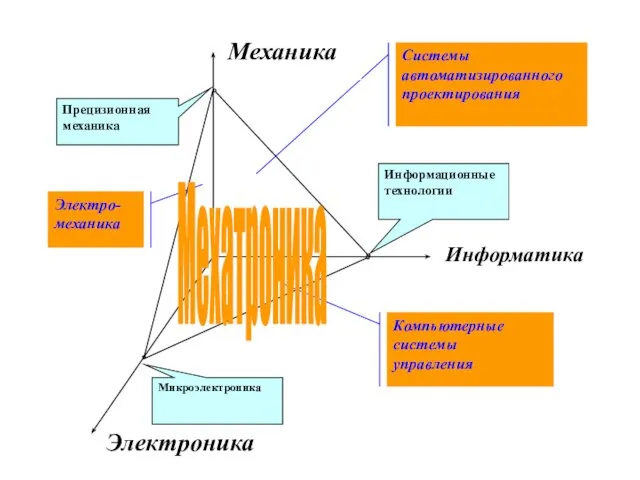
- 73. Основные определения мехатроники
- 74. "Мехатроника - это область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными
- 76. Области применения мехатронных систем станкостроение и оборудование для автоматизации технологических процессов в машиностроении промышленная и сервисная
- 77. Области применения мехатронных систем бытовая техника ( стиральные, швейные, посудомоечные машины, автономные пылесосы) микромашины ( для
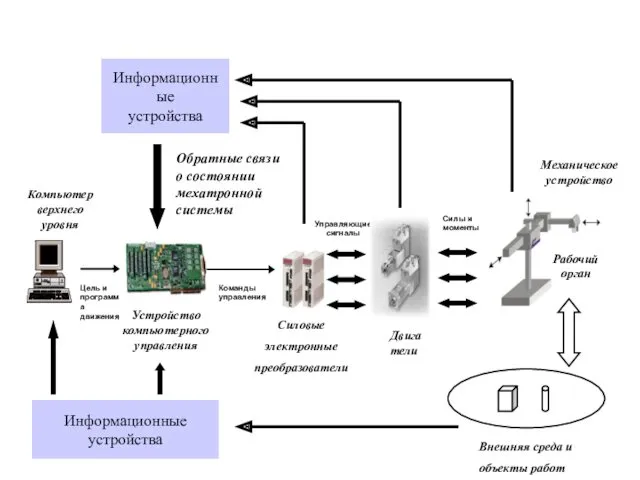
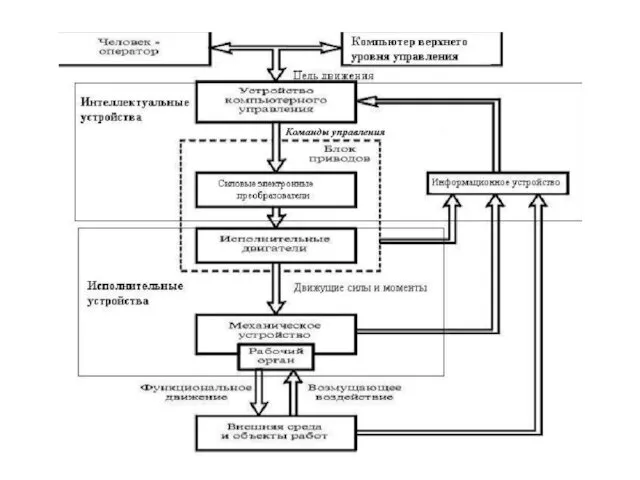
- 79. Структура роботов и мехатронных машин
- 80. Рабочий орган
- 82. Мобильные технологические роботы для инспекции и ремонта подземных трубопроводов (новые служебные функции роботов)
- 84. НАЗНАЧЕНИЕ: телеинспекция магистралей для предупреждения техногенных и экологических аварий и катастроф, контроль за состоянием действующих трубопроводов
- 85. Видео ТАРИС!
- 86. http://www.taris.ru Вариант автомобильной или переносной системы телеинспекции с кабельным барабаном (длина кабеля до 300м)
- 87. Плавающий модуль для трубопроводов http://www.taris.ru Назначение: видеодиагностика (телеинспекция) частично заполненных трубопроводов и коллекторов диаметром от 450
- 88. http://www.taris.ru Пневматический пакер для установки ремонтных бандажей
- 89. Устанавливаемый бандаж состоит из металлической обечайки и слоя ткани, пропитанной полимером. Под действием давления, подаваемого по
- 90. Стрелками на схеме обозначены: А - перемещение робота за счет колесного привода, скорость от 0 до
- 91. Военные роботы России (новые служебные функции роботов)
- 92. Видео: Уран – 9 Нерехта
- 93. Робототехнический комплекс "Уран-6" Источник: Анатолий Соколов / ИА "Оружие России" http://vpk.name/news/169680_rossiya_zadeistvuet_robotov_v_operacii_po_razminirovaniyu_aleppo.html
- 94. Мобильные роботы для работы в средах радиоактивного загрязнения (новые служебные функции роботов)
- 95. Роботы на ликвидации последствий аварии на ЧАЭС Специализированный транспортный робот (СТР-1) http://chornobyl.in.ua/robot-str.html
- 96. Роботы на ликвидации последствий аварии на ЧАЭС Специализированный транспортный робот (СТР-1) http://chornobyl.in.ua/robot-str.html
- 97. Видео ВНИИА-ИТУЦР!
- 98. Современный российский робототехнический комплекс разведки Состав РТК: Базовое транспортное средство Навесное оборудование: Манипулятор Гамма-локатор с блоком
- 99. Робототехнический комплекс разведки. Преодоление водной преграды ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный центр робототехники
- 100. Робототехнический комплекс разведки. Преодоление лестницы и дверного проема ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный
- 101. Дезактивация автотранспорта РТК МРК-27МА ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный центр робототехники
- 102. Радиационная разведка зоны инцидента гамма - локатором ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный центр
- 103. Укладка дезактивирующих захватов на просыпь ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный центр робототехники
- 104. Робот РТК-М на операции демонтажа трубопровода ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный центр робототехники
- 105. Робототехника для банковского сектора (новые служебные функции роботов) АО «Квантум Системс» www.quatumspace.ru Видео!
- 106. Машины с параллельной структурой Первый отечественный гексапод (Новосибирск, 1984)
- 107. Pentapod - Structure Highly dynamic precision with 5 rotary direct drives Minimized virbrations due to low
- 108. Технологический комплекс «HexaBend» (Институт станков и прессов IWU, Кемниц, Германия)
- 109. Машины с гибридной структурой Технологический комплекс «Dynapod» (Институт станков и прессов IWU, Кемниц, Германия)
- 110. Методы автоматического управления и Поколения роботов
- 111. Программное управление (Первое поколение) ? Позиционное управление ? Контурное управление ? Траекторное управление Роботы первого поколения
- 112. Позиционное управление Позиционное управление (pose-to-pose control, PTP control): Режим управления, при котором пользователь может устанавливать перемещения
- 113. Позиционное управление Исходное положение P0 Pm Целевое положение Промежуточные точки P1 P2 P3
- 114. Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS Robot)
- 115. Контурное управление Контурное управление (continuous path control, CP control): Режим управления, при котором пользователь может устанавливать
- 116. Контурное управление P0 Pm P0P1P2P3Pm - программная траектория P1 P2 P3
- 117. Траекторное управление Траекторное управление (trajectory control) – контурное управление с запрограммированным значением скоростей перемещения.
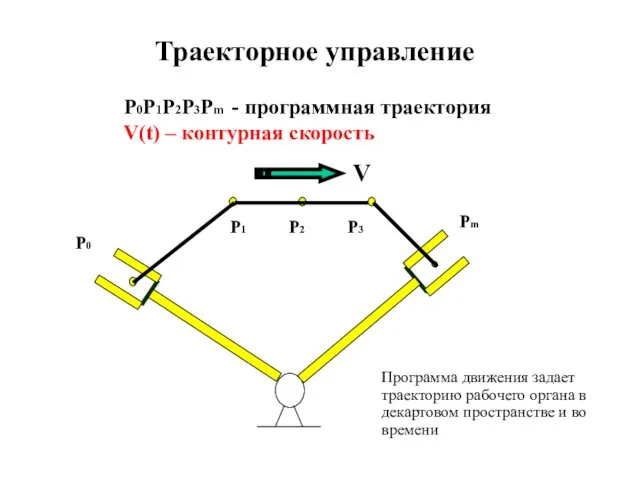
- 118. Траекторное управление P0 Pm P0P1P2P3Pm - программная траектория V(t) – контурная скорость P1 P2 P3 V
- 119. Траекторное управление : роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
- 120. Адаптивное управление Адаптивное управление (adaptive control): Режим управления, при котором параметры системы управления настраиваются в зависимости
- 121. Адаптивное управление: Робототехнологический комплекс (МГТУ Станкин - Будапештский ТУ) 1 – манипулятор PUMA-560, 2 – устройство
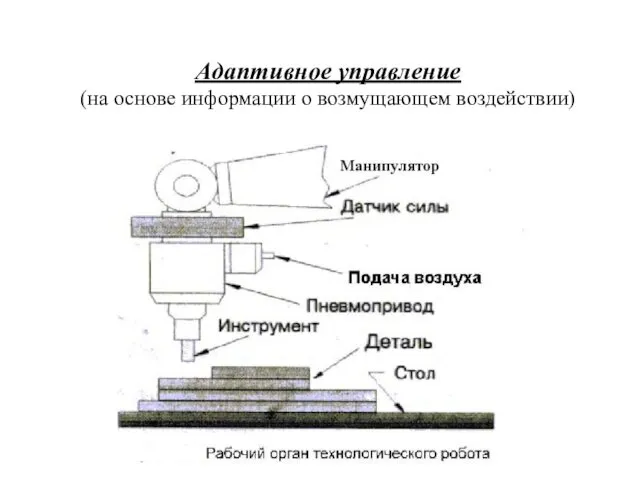
- 122. Адаптивное управление (на основе информации о возмущающем воздействии)
- 123. Конструкция силомоментного датчика С.А.Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана, 2005
- 124. Алгоритм адаптивного управления V - контурная скорость рабочего органа N - заданное значение мощности резания Fрез
- 125. Методы интеллектуального управления Нейронные сети Нечеткая логика Экспертные системы Ассоциативная память
- 126. Основные части нервной клетки (нейрона)
- 127. Нейроны головного мозга: - общее кол-во клеток: 1012 (миллион миллионов) - каждый нейрон связан от сотни
- 128. Структура нервной системы
- 129. Интеллектуальное управление на основе искусственных нейронных сетей. Математическая модель нейрона Σ w1 wn f In1 In
- 130. Структура нейронной сети ANNs are taught by system developer at concrete cases. While teaching the developer
- 131. Обучение нейронной сети
- 132. Применение нейронной сети
- 133. Пример применения нейросети в современной робототехнике «От Текстовой Команды к Движению Робота» Hyemin Ahn, Timothy Ha,
- 134. Задача нейросети
- 135. Обучение нейросети правильным позам
- 136. Программирование движений робота
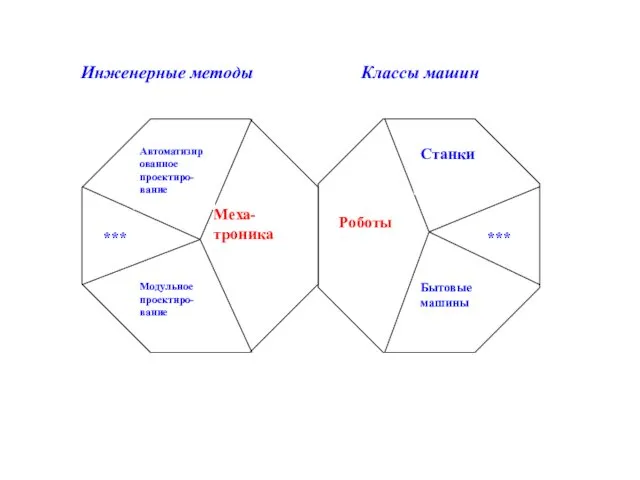
- 137. Классификация мехатронных модулей Модуль движения (МД) – конструктивно и функционально самостоятельное изделие, в котором конструктивно объединены
- 138. Классификация мехатронных модулей
- 139. Модули движения: моторы-редукторы на базе асинхронных двигателей (фирма Dunkermotoren)
- 140. Мехатронный модуль движения (фирма Maxon)
- 141. Интеллектуальный мехатронный модуль робота LWR KUKA
- 142. Сверхточные (ультрапрецизионные) движения в мехатронных системах
- 143. Традиционный привод линейных перемещений
- 144. Недостатки традиционных модулей большое количество промежуточных элементов от двигателя до конечного звена; ∙ высокая инерционность механических
- 145. Линейные двигатели (Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей. с.101-106)
- 146. Мехатронный модуль на базе линейного электродвигателя 1 – ротор линейного двигателя, 2 – статор, 3 –
- 147. К основным преимуществам мехатронных модулей на базе ЛД можно отнести: • высокие динамические характеристики: максимальные скорости
- 148. Кинематические задачи в робототехнике и мехатронике - Прямая задача о положении многозвенного механизма - Обратная задача
- 149. Прямая задача о положении многозвенного механизма Постановка задачи: Определить вектор положения концевой точки (рабочего органа) в
- 150. q1= r q2 P x y Пример
- 151. Пример: прямая задача о положении двухзвенного механизма
- 152. Обратная задача о положении многозвенного механизма Постановка задачи: Определить обобщенные координаты многозвенного механизма по заданному вектору
- 153. Пример: обратная задача о положении двухзвенного механизма
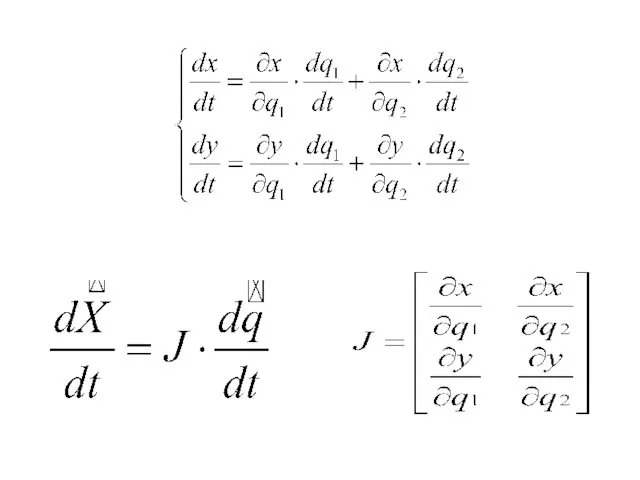
- 154. Прямая задача о скорости многозвенного механизма Постановка задачи: Определить вектор скорости концевой точки (рабочего органа) по
- 155. Прямая задача о скорости многозвенного механизма z y x P V Ω
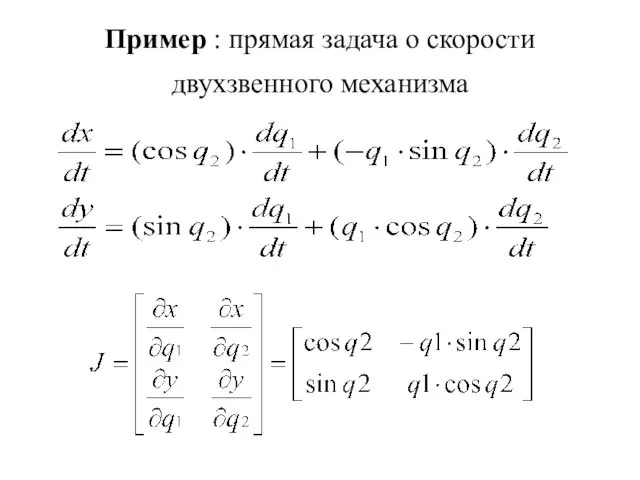
- 157. Пример : прямая задача о скорости двухзвенного механизма
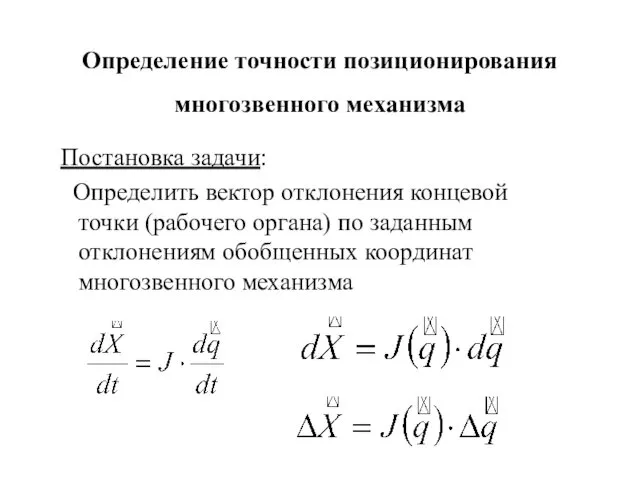
- 158. Определение точности позиционирования многозвенного механизма Постановка задачи: Определить вектор отклонения концевой точки (рабочего органа) по заданным
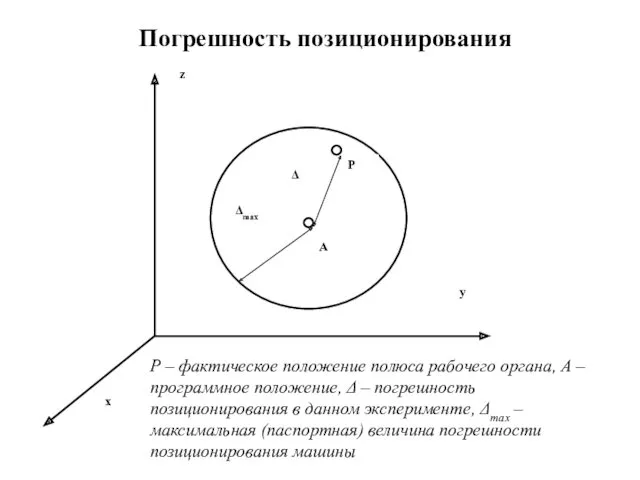
- 159. Погрешность позиционирования Р – фактическое положение полюса рабочего органа, А – программное положение, Δ – погрешность
- 160. Погрешность отработки траектории L – фактическая траектория полюса рабочего органа, G – программная траектория, δ max
- 161. Обратная задача о скорости многозвенного механизма Постановка задачи: Определить обобщенные скорости многозвенного механизма по заданному вектору
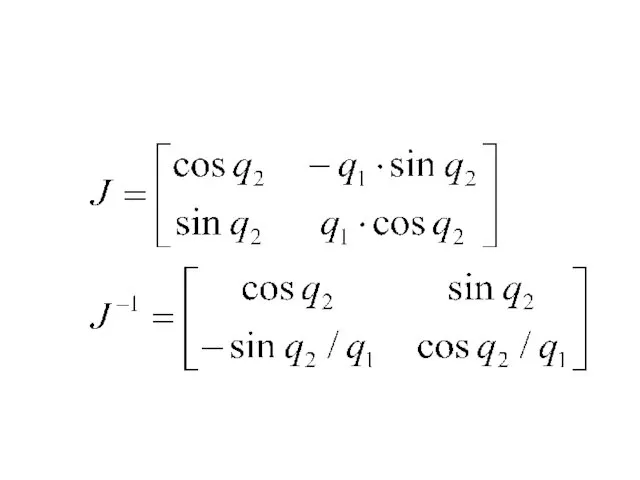
- 162. Пример : обратная задача о скорости двухзвенного механизма
- 164. Определение дистанционного управления Дистанционное управление (remote control): Управление роботом в реальном времени на расстоянии и под
- 165. Методы дистанционного управления Командное управление Копирующее управление Полуавтоматическое управление
- 166. Командное управление
- 167. Копирующее управление
- 168. Копирующее управление
- 169. Полуавтоматическое управление ? Позиционное управление ? Управление по вектору скорости ? Управление по вектору силы ?
- 170. Доп слайды
- 171. Полуавтоматическое управление
- 172. ОБЛАСТЬ ПРОФЕССИОНАЛЬНОЙ ДЕЯТЕЛЬНОСТИ ВЫПУСКНИКОВ, ОСВОИВШИХ ПРОГРАММУ БАКАЛАВРИАТА (направление 15.03.06 Мехатроника и робототехника) Проектирование, исследование, производство и
- 173. ОБЪЕКТЫ ПРОФЕССИОНАЛЬНОЙ ДЕЯТЕЛЬНОСТИ ВЫПУСКНИКОВ, ОСВОИВШИХ ПРОГРАММУ БАКАЛАВРИАТА (направление 15.03.06 Мехатроника и робототехника) Мехатронные и робототехнические системы,
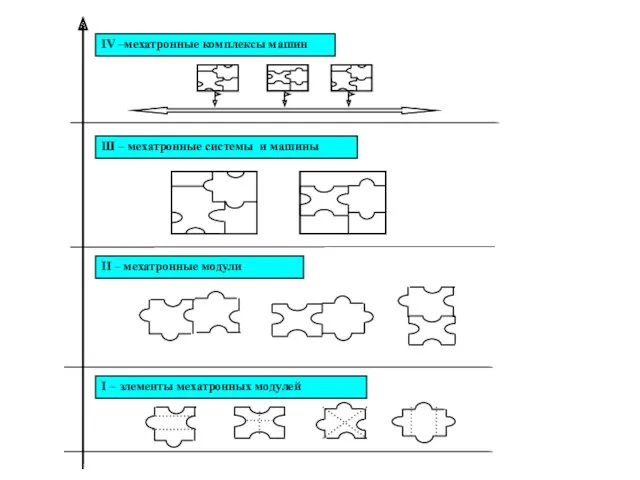
- 175. II – мехатронные модули I – элементы мехатронных модулей Ш – мехатронные системы и машины IV
- 176. Адаптивное управление Внешняя среда Управляющее устройство Объект управления Изменения: 1.Параметры регулятора (Kp , Ki , Kd
- 177. Структура нервной системы
- 178. Актуальные документы и нормативные акты по развитию отечественной робототехники 1. Стратегия научно-технологического развития Российской Федерации (утверждена
- 179. Стратегия научно-технологического развития Российской Федерации (утверждена Указом Президента Российской Федерации от 1 декабря 2016 г. №
- 180. Внести в приоритетные направления развития науки, технологий и техники в Российской Федерации, утвержденные Указом Президента Российской
- 181. Робототехника –перспективное профессия на ближайшие годы Атлас новых профессий, подготовленный экспертами Московской школы управления «Сколково»: http://www.skolkovo.ru/public/media/documents/research/sedec/SKOLKOVO_SEDeC_Atlas.pdf
- 182. Проектировщик промышленной робототехники РОБОТОТЕХНИКА. АТЛАС НОВЫХ ПРОФЕССИЙ
- 183. Оператор многофункциональных робототехнических комплексов РОБОТОТЕХНИКА. АТЛАС НОВЫХ ПРОФЕССИЙ
- 184. Проектировщик домашних роботов РОБОТОТЕХНИКА. АТЛАС НОВЫХ ПРОФЕССИЙ
- 185. Проектировщик медицинских роботов РОБОТОТЕХНИКА. АТЛАС НОВЫХ ПРОФЕССИЙ
- 186. Электромагнитная система
- 188. Скачать презентацию
Виды занятий
16 лекций (х 2 час)
12 практических занятий (х 2 час)
12
Виды занятий
16 лекций (х 2 час)
12 практических занятий (х 2 час)
12
Основная литература
Подураев Ю.В. Мехатроника: основы, методы, применение. М.: Машиностроение. 2007-2008
Робототехнические мехатронные
Основная литература
Подураев Ю.В. Мехатроника: основы, методы, применение. М.: Машиностроение. 2007-2008
Робототехнические мехатронные
Термин «Робот»
Карел Чапек «RUR» (Россумовские универсальные роботы), 1921
Аналоги: «Работа», «Раб»,
Термин «Робот»
Карел Чапек «RUR» (Россумовские универсальные роботы), 1921
Аналоги: «Работа», «Раб»,
Термин «Робот»
Карел Чапек «RUR» (Россумовские универсальные роботы), 1921
Коллективная драма в
Термин «Робот»
Карел Чапек «RUR» (Россумовские универсальные роботы), 1921
Коллективная драма в
ТЕРМИН «РОБОТОТЕХНИКА»
(Robotics)
Введен писателем - фантастом Айзеком Азимовым в 1940-х годах
ТЕРМИН «РОБОТОТЕХНИКА»
(Robotics)
Введен писателем - фантастом Айзеком Азимовым в 1940-х годах
ТРИ ЗАКОНА РОБОТОТЕХНИКИ
Закон 1. Робот не может причинить вред человеку или
ТРИ ЗАКОНА РОБОТОТЕХНИКИ
Закон 1. Робот не может причинить вред человеку или
Международная терминология робототехники
ГОСТ Р 60.0.0.4−2018/
ISO 8373:2012
(проект, окончательная редакция)
Международная терминология робототехники
ГОСТ Р 60.0.0.4−2018/
ISO 8373:2012
(проект, окончательная редакция)
Общие термины: РОБОТ
Робот (Robot): Исполнительный механизм, программируемый по двум или
Общие термины: РОБОТ
Робот (Robot): Исполнительный механизм, программируемый по двум или
Две категории роботов
Две категории роботов
Две категории роботов
Назначение - промышленная автоматизация:
Производство
Сборка
Упаковка
Другое
Другое назначение
Две категории роботов
Назначение - промышленная автоматизация:
Производство
Сборка
Упаковка
Другое
Другое назначение

Две категории роботов
https://new.abb.com/products/robotics
IRB 1200
Две категории роботов
https://new.abb.com/products/robotics
IRB 1200
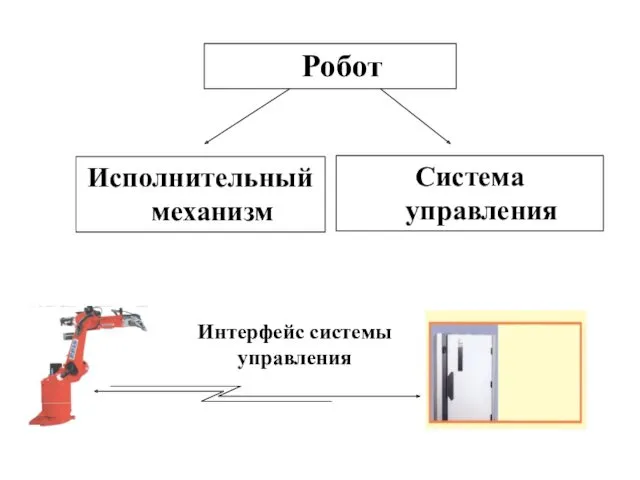
Интерфейс системы управления
Интерфейс системы управления
Общие термины: СТЕПЕНЬ ПОДВИЖНОСТИ
Степень подвижности:
Параметр, используемый для задания поступательного или
Общие термины: СТЕПЕНЬ ПОДВИЖНОСТИ
Степень подвижности:
Параметр, используемый для задания поступательного или

Робот с прямоугольной системой координат
Число степеней подвижности
n = ?
Робот с прямоугольной системой координат
Число степеней подвижности
n = ?

Робот KUKA KR 500
https://www.eurobots.ru/kuka-robots-kr-500-2-p251-en.html
Число степеней подвижности
n = ?
Робот KUKA KR 500
https://www.eurobots.ru/kuka-robots-kr-500-2-p251-en.html
Число степеней подвижности
n = ?
Робот KUKA KR 500
ВИДЕО (Youtube):
Simulation of the KUKA KR 500
Робот KUKA KR 500
ВИДЕО (Youtube):
Simulation of the KUKA KR 500
Общие термины: МАНИПУЛЯТОР
Манипулятор (manipulator): Машина, механизм которой обычно состоит из
Общие термины: МАНИПУЛЯТОР
Манипулятор (manipulator): Машина, механизм которой обычно состоит из
Общие термины:
РАБОЧИЙ ОРГАН
Рабочий орган (end effector): Устройство, специально разработанное
Общие термины:
РАБОЧИЙ ОРГАН
Рабочий орган (end effector): Устройство, специально разработанное

РТК высокоскоростной съемки
Промышленный робот ABB IRB 140
Высокоскоростная камера Miro 320
Устройство синхронизации
Периферийное
РТК высокоскоростной съемки
Промышленный робот ABB IRB 140
Высокоскоростная камера Miro 320
Устройство синхронизации
Периферийное

РАБОЧИЕ ОРГАНЫ
Захватное устройство для сброса объектов
Устройство высыпания мелких
объектов
Выливное устройство для
РАБОЧИЕ ОРГАНЫ
Захватное устройство для сброса объектов
Устройство высыпания мелких
объектов
Выливное устройство для

Особенность РТК
Возможность движения камеры с ускорением свободного падения, как по линейным,
Особенность РТК
Возможность движения камеры с ускорением свободного падения, как по линейным,
Степень свободы (degree of freedom, DOF):
Одна из переменных (максимальное
Степень свободы (degree of freedom, DOF): Одна из переменных (максимальное
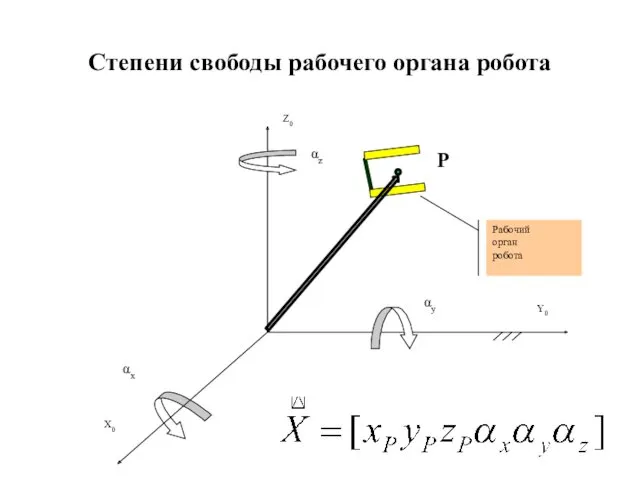
Степени свободы рабочего органа робота
P
Степени свободы рабочего органа робота
P
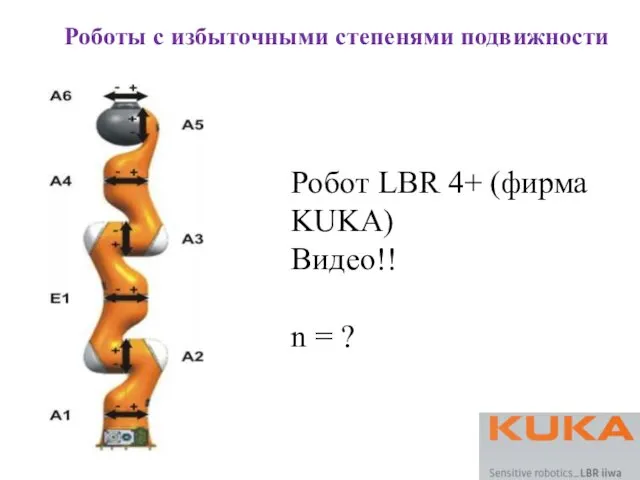
Робот LBR 4+ (фирма KUKA)
Видео!!
n = ?
Роботы с избыточными степенями подвижности
Робот LBR 4+ (фирма KUKA)
Видео!!
n = ?
Роботы с избыточными степенями подвижности

Робот LBR 4+ (фирма KUKA)
n =7 степеней подвижности
Роботы с избыточными степенями
Робот LBR 4+ (фирма KUKA)
n =7 степеней подвижности
Роботы с избыточными степенями
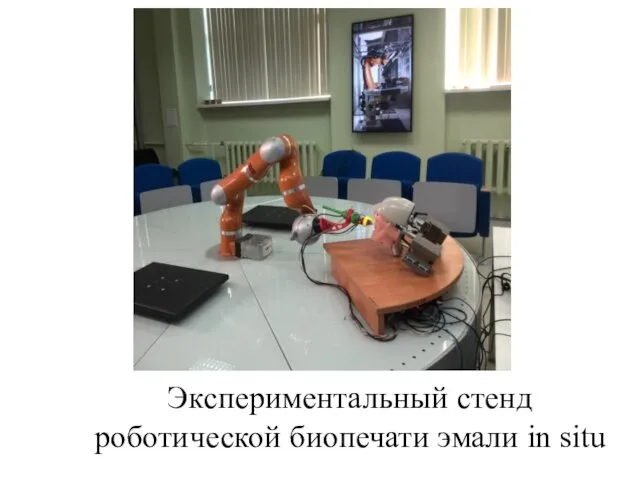
Экспериментальный стенд роботической биопечати эмали in situ
Экспериментальный стенд роботической биопечати эмали in situ
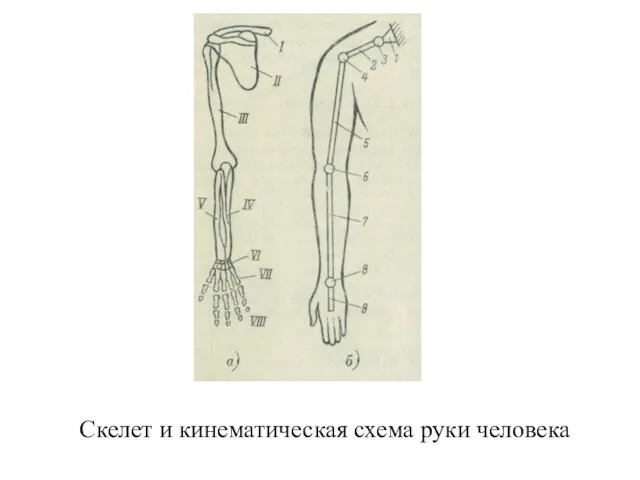
Скелет и кинематическая схема руки человека
Скелет и кинематическая схема руки человека
Общие термины: СИСТЕМА УПРАВЛЕНИЯ
Система управления (control system): Совокупность управляющей логики
Общие термины: СИСТЕМА УПРАВЛЕНИЯ
Система управления (control system): Совокупность управляющей логики
Общие термины: АВТОНОМНОСТЬ
Автономность (autonomy): Способность выполнять поставленное задание без вмешательства
Общие термины: АВТОНОМНОСТЬ
Автономность (autonomy): Способность выполнять поставленное задание без вмешательства
Международная терминология робототехники
ГОСТ Р 60.0.0.4−2018/
ISO 8373:2012
(проект, окончательная редакция)
Международная терминология робототехники
ГОСТ Р 60.0.0.4−2018/
ISO 8373:2012
(проект, окончательная редакция)
Общие термины: РОБОТ
Робот (Robot): Исполнительный механизм, программируемый по двум или
Общие термины: РОБОТ
Робот (Robot): Исполнительный механизм, программируемый по двум или
Общие термины: РОБОТОТЕХНИЧЕСКОЕ УСТРОЙСТВО
Робототехническое устройство
(robotic device): Исполнительный механизм, обладающий характеристиками
Общие термины: РОБОТОТЕХНИЧЕСКОЕ УСТРОЙСТВО
Робототехническое устройство
(robotic device): Исполнительный механизм, обладающий характеристиками
Общие термины: РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС
Робототехнический комплекс (robot system): Комплекс, состоящий из одного
Общие термины: РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС
Робототехнический комплекс (robot system): Комплекс, состоящий из одного
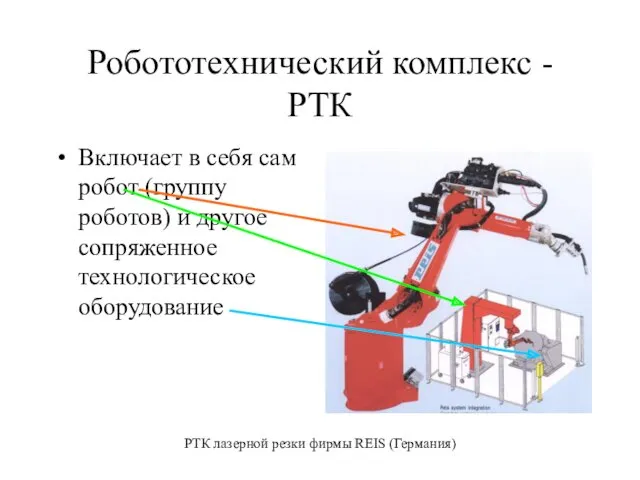
Робототехнический комплекс - РТК
Включает в себя сам робот (группу роботов) и
Робототехнический комплекс - РТК
Включает в себя сам робот (группу роботов) и
Определение промышленного робота (industrial robot)
Автоматически управляемый, перепрограммируемый, реконфигурируемый манипулятор, программируемый по
Определение промышленного робота (industrial robot)
Автоматически управляемый, перепрограммируемый, реконфигурируемый манипулятор, программируемый по
Определение сервисного робота (service robot)
Робот, который выполняет задания, полезные для человека
Определение сервисного робота (service robot)
Робот, который выполняет задания, полезные для человека
Признаки классификации промышленных роботов
Грузоподъемность
Возможность передвижения
Тип привода
Способ установки на рабочем месте
Выполняемая
Признаки классификации промышленных роботов
Грузоподъемность
Возможность передвижения
Тип привода
Способ установки на рабочем месте
Выполняемая
- сверхлегкие – номин. грузоподъемность до 1 кг.
- легкие – номин.
- сверхлегкие – номин. грузоподъемность до 1 кг.
- легкие – номин.
- стационарные промышленные роботы;
- подвижные промышленные роботы.
Возможность передвижения промышленных
- подвижные промышленные роботы.
Возможность передвижения промышленных
Тип привода промышленных роботов
ПР с электромеханическими приводами.
ПР с гидравлическими приводами.
ПР с
Тип привода промышленных роботов
ПР с электромеханическими приводами.
ПР с гидравлическими приводами.
ПР с
- напольные промышленные роботы;
- подвесные промышленные роботы;
- встроенные
- напольные промышленные роботы;
- подвесные промышленные роботы;
- встроенные
- универсальные промышленные роботы – роботы, осуществляющие разные технологические операции в
- универсальные промышленные роботы – роботы, осуществляющие разные технологические операции в
- обрабатывающие промышленные роботы – роботы, используемые при операциях механообработки (шлифовка,
промышленные роботы с ручным
управлением
промышленные роботы с программным
управлением
промышленные роботы с
промышленные роботы с ручным
управлением
промышленные роботы с программным
управлением
промышленные роботы с
- промышленные роботы, программируемые обучением;
- промышленные роботы программируемые аналитически (автономное
- промышленные роботы программируемые аналитически (автономное
Программирование обучением (teach programming):
Программирование, осуществляемое с помощью проведения вручную рабочего
Программирование обучением (teach programming):
Программирование, осуществляемое с помощью проведения вручную рабочего
Автономное программирование
(off-line programming):
Способ программирования, при котором программа выполнения задания
Автономное программирование
(off-line programming):
Способ программирования, при котором программа выполнения задания
SprutCAM —система подготовки управляющих программ для промышленных роботов на персональных компьютерах
https://www.sprut.ru/products-and-solutions/products/sprutcam/robot-promo
ВИДЕО:
SprutCAM_
SprutCAM —система подготовки управляющих программ для промышленных роботов на персональных компьютерах
https://www.sprut.ru/products-and-solutions/products/sprutcam/robot-promo
ВИДЕО:
SprutCAM_
промышленные роботы с прямоугольной системой координат
промышленные роботы с цилиндрической системой координат
промышленные
промышленные роботы с цилиндрической системой координат
промышленные

Прямоугольная система координат
Прямоугольная система координат

Прямоугольная система координат
Прямоугольная система координат

Цилиндрическая система координат
Цилиндрическая система координат

Цилиндрическая система координат
Цилиндрическая система координат

Сферическая система координат
Сферическая система координат

Сферическая система координат
Сферическая система координат

Угловая система координат
Угловая система координат

Угловая система координат
(типа SCARA)
ВИДЕО: SCARA_MATLAB_program_demo.mp4
Угловая система координат
(типа SCARA)
ВИДЕО: SCARA_MATLAB_program_demo.mp4
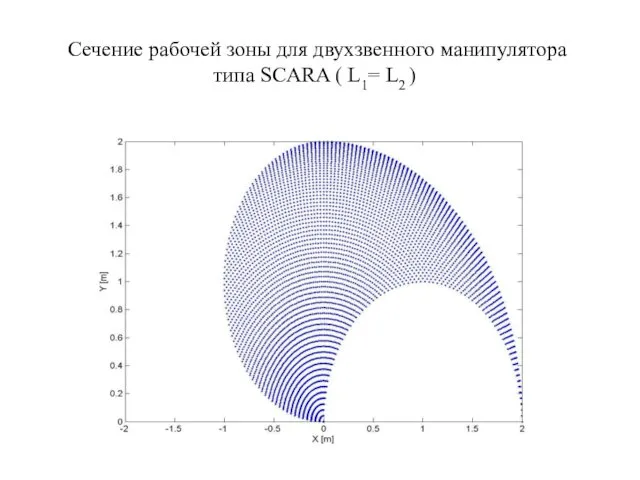
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1=
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L1=
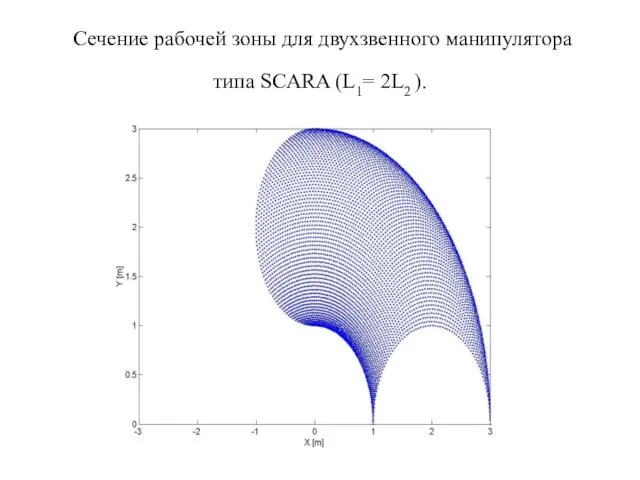
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA (L1= 2L2
Угловая система координат
(типа PUMA)
Угловая система координат
(типа PUMA)

Угловая система координат
(типа PUMA)
ВИДЕО: Puma_Robot_560RobotPuma560207.3gp
Угловая система координат
(типа PUMA)
ВИДЕО: Puma_Robot_560RobotPuma560207.3gp
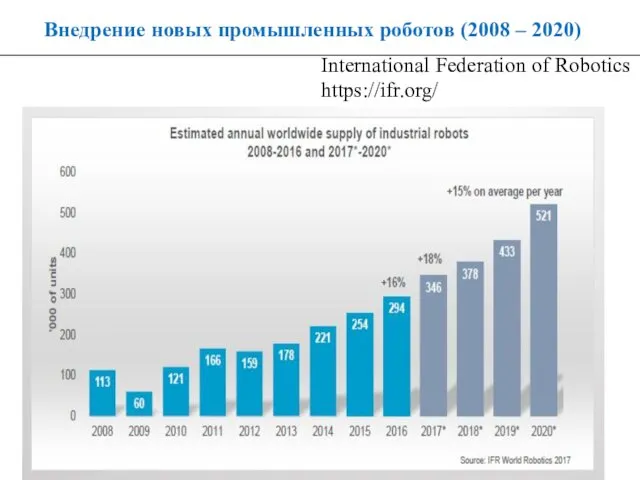
Внедрение новых промышленных роботов (2008 – 2020)
International Federation of Robotics
https://ifr.org/
Внедрение новых промышленных роботов (2008 – 2020)
International Federation of Robotics
https://ifr.org/

Общее количество внедренных ПР
International Federation of Robotics
https://ifr.org/
Общее количество внедренных ПР
International Federation of Robotics
https://ifr.org/
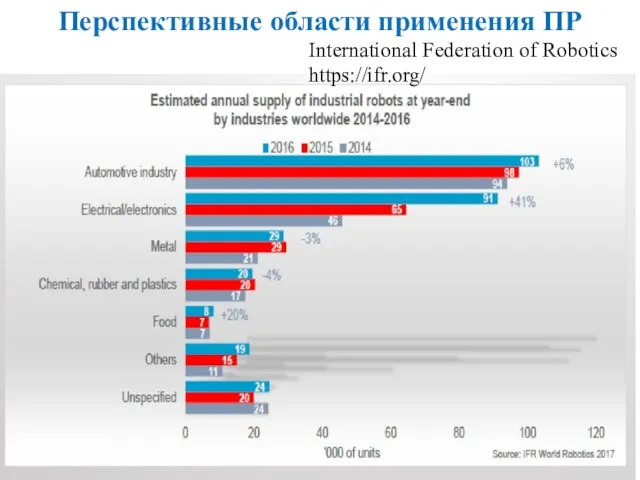
Перспективные области применения ПР
International Federation of Robotics
https://ifr.org/
Перспективные области применения ПР
International Federation of Robotics
https://ifr.org/
Признаки классификации сервисных роботов
Возможность передвижения
- роботы мобильные
- роботы
Признаки классификации сервисных роботов
Возможность передвижения
- роботы мобильные
- роботы
Сервисные роботы для личного и домашнего использования
Роботы для домашней работы (уборка
Сервисные роботы для личного и домашнего использования
Роботы для домашней работы (уборка
Сервисные роботы для профессионального использования
Медицинские роботы
Роботы военного и специального назначения
Сервисные роботы для профессионального использования
Медицинские роботы
Роботы военного и специального назначения
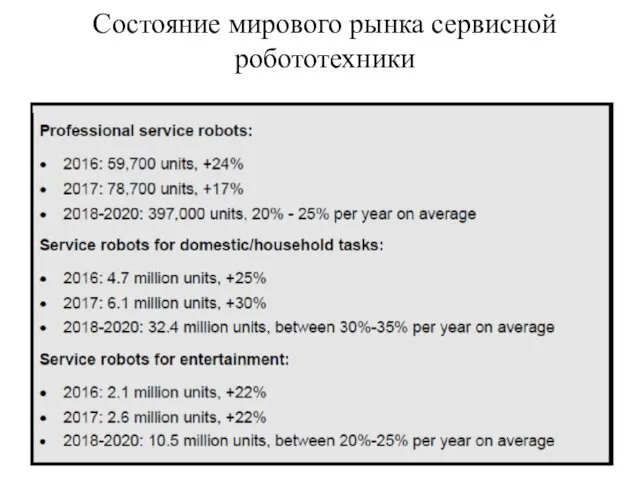
Состояние мирового рынка сервисной робототехники
Состояние мирового рынка сервисной робототехники
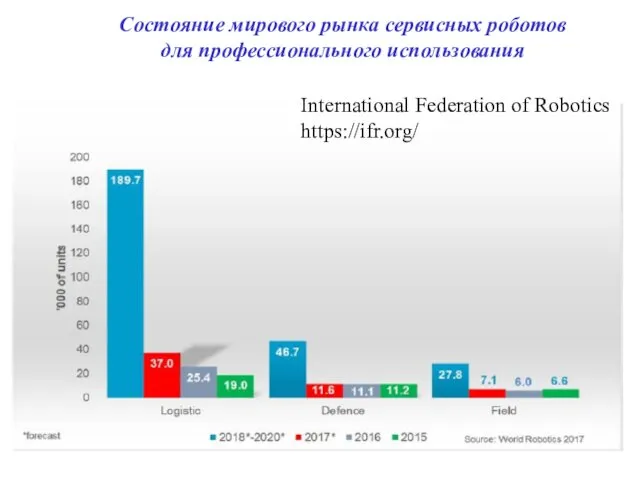
Состояние мирового рынка сервисных роботов для профессионального использования
International Federation of
Состояние мирового рынка сервисных роботов для профессионального использования
International Federation of
Состояние мирового рынка сервисных роботов для профессионального использования
International Federation of
Состояние мирового рынка сервисных роботов для профессионального использования
International Federation of
Состояние мирового рынка сервисных роботов для личного и домашнего использования
International
Состояние мирового рынка сервисных роботов для личного и домашнего использования
International
Основные определения мехатроники
Основные определения мехатроники
"Мехатроника - это область науки и техники, основанная на синергетическом объединении
"Мехатроника - это область науки и техники, основанная на синергетическом объединении
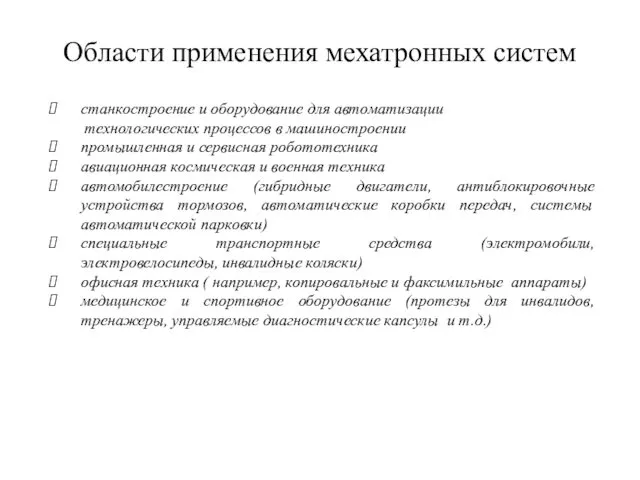
Области применения мехатронных систем
станкостроение и оборудование для автоматизации
технологических процессов
Области применения мехатронных систем
станкостроение и оборудование для автоматизации
технологических процессов
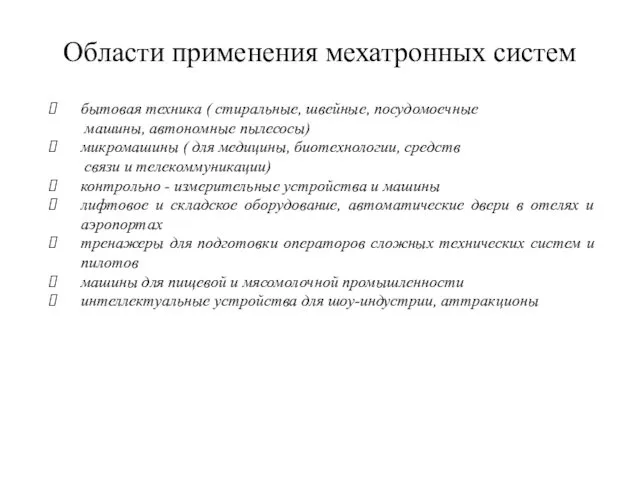
Области применения мехатронных систем
бытовая техника ( стиральные, швейные, посудомоечные
машины,
Области применения мехатронных систем
бытовая техника ( стиральные, швейные, посудомоечные
машины,
Структура
роботов и
мехатронных машин
Структура
роботов и
мехатронных машин
Рабочий орган
Рабочий орган
Мобильные технологические роботы для инспекции и ремонта подземных трубопроводов
(новые служебные
Мобильные технологические роботы для инспекции и ремонта подземных трубопроводов (новые служебные
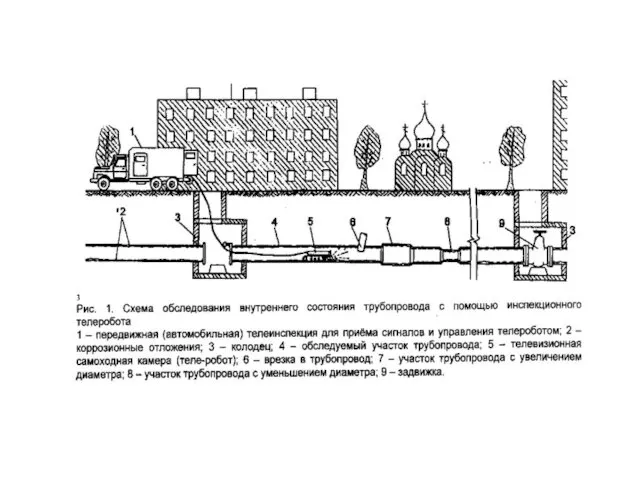
НАЗНАЧЕНИЕ:
телеинспекция магистралей для предупреждения техногенных и
экологических аварий и катастроф,
НАЗНАЧЕНИЕ:
телеинспекция магистралей для предупреждения техногенных и
экологических аварий и катастроф,
Видео ТАРИС!
Видео ТАРИС!

http://www.taris.ru
Вариант автомобильной или переносной системы телеинспекции с кабельным барабаном
(длина кабеля
http://www.taris.ru
Вариант автомобильной или переносной системы телеинспекции с кабельным барабаном
(длина кабеля

Плавающий модуль для трубопроводов
http://www.taris.ru
Назначение: видеодиагностика (телеинспекция) частично заполненных трубопроводов и коллекторов диаметром
Плавающий модуль для трубопроводов
http://www.taris.ru
Назначение: видеодиагностика (телеинспекция) частично заполненных трубопроводов и коллекторов диаметром

http://www.taris.ru
Пневматический пакер для установки
ремонтных бандажей
http://www.taris.ru
Пневматический пакер для установки
ремонтных бандажей

Устанавливаемый бандаж состоит из металлической обечайки и слоя ткани, пропитанной полимером.

Стрелками на схеме обозначены:
А - перемещение робота за счет колесного привода,
Военные роботы России
(новые служебные функции роботов)
Военные роботы России
(новые служебные функции роботов)
Видео:
Уран – 9
Нерехта
Видео:
Уран – 9
Нерехта

Робототехнический комплекс "Уран-6"
Источник: Анатолий Соколов / ИА "Оружие России"
http://vpk.name/news/169680_rossiya_zadeistvuet_robotov_v_operacii_po_razminirovaniyu_aleppo.html
Робототехнический комплекс "Уран-6"
Источник: Анатолий Соколов / ИА "Оружие России"
http://vpk.name/news/169680_rossiya_zadeistvuet_robotov_v_operacii_po_razminirovaniyu_aleppo.html
Мобильные роботы для работы в средах радиоактивного загрязнения (новые служебные функции
Мобильные роботы для работы в средах радиоактивного загрязнения (новые служебные функции

Роботы на ликвидации последствий аварии на ЧАЭС
Специализированный транспортный робот (СТР-1) http://chornobyl.in.ua/robot-str.html
Роботы на ликвидации последствий аварии на ЧАЭС
Специализированный транспортный робот (СТР-1) http://chornobyl.in.ua/robot-str.html

Роботы на ликвидации последствий аварии на ЧАЭС
Специализированный транспортный робот (СТР-1) http://chornobyl.in.ua/robot-str.html
Роботы на ликвидации последствий аварии на ЧАЭС
Специализированный транспортный робот (СТР-1) http://chornobyl.in.ua/robot-str.html
Видео ВНИИА-ИТУЦР!
Видео ВНИИА-ИТУЦР!
Современный российский робототехнический комплекс разведки
Состав РТК:
Базовое транспортное средство
Навесное оборудование:
Манипулятор
Гамма-локатор с
Современный российский робототехнический комплекс разведки
Состав РТК:
Базовое транспортное средство
Навесное оборудование:
Манипулятор
Гамма-локатор с

Робототехнический комплекс разведки.
Преодоление водной преграды
ФГУП «Аварийно-технический центр Минатома России.
Робототехнический комплекс разведки.
Преодоление водной преграды
ФГУП «Аварийно-технический центр Минатома России.

Робототехнический комплекс разведки.
Преодоление лестницы и дверного проема
ФГУП «Аварийно-технический центр Минатома
Робототехнический комплекс разведки.
Преодоление лестницы и дверного проема
ФГУП «Аварийно-технический центр Минатома

Дезактивация автотранспорта РТК МРК-27МА
ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный
Дезактивация автотранспорта РТК МРК-27МА
ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и учебный

Радиационная разведка зоны инцидента гамма - локатором
ФГУП «Аварийно-технический центр Минатома России.
Радиационная разведка зоны инцидента гамма - локатором
ФГУП «Аварийно-технический центр Минатома России.

Укладка дезактивирующих захватов на просыпь
ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и
Укладка дезактивирующих захватов на просыпь
ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический и

Робот РТК-М
на операции демонтажа трубопровода
ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический
Робот РТК-М
на операции демонтажа трубопровода
ФГУП «Аварийно-технический центр Минатома России. Инженерно-технический
Робототехника для банковского сектора
(новые служебные функции роботов)
АО «Квантум Системс»
www.quatumspace.ru
Видео!
Робототехника для банковского сектора
(новые служебные функции роботов)
АО «Квантум Системс»
www.quatumspace.ru
Видео!

Машины с параллельной структурой
Первый отечественный гексапод (Новосибирск, 1984)
Машины с параллельной структурой
Первый отечественный гексапод (Новосибирск, 1984)
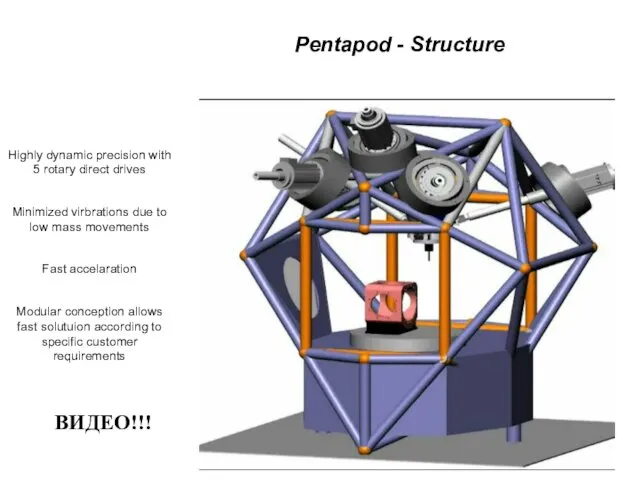
Pentapod - Structure
Highly dynamic precision with 5 rotary direct drives
Minimized virbrations
Pentapod - Structure
Highly dynamic precision with 5 rotary direct drives
Minimized virbrations

Технологический комплекс «HexaBend»
(Институт станков и прессов IWU, Кемниц, Германия)
Технологический комплекс «HexaBend»
(Институт станков и прессов IWU, Кемниц, Германия)

Машины с гибридной структурой
Технологический комплекс «Dynapod»
(Институт станков и прессов IWU,
Машины с гибридной структурой
Технологический комплекс «Dynapod»
(Институт станков и прессов IWU,
Методы автоматического управления и Поколения роботов
Методы автоматического управления и Поколения роботов
Программное управление (Первое поколение)
? Позиционное управление
? Контурное управление
? Траекторное
Программное управление (Первое поколение)
? Позиционное управление
? Контурное управление
? Траекторное
Позиционное управление
Позиционное управление (pose-to-pose control, PTP control):
Режим управления, при
Позиционное управление
Позиционное управление (pose-to-pose control, PTP control):
Режим управления, при
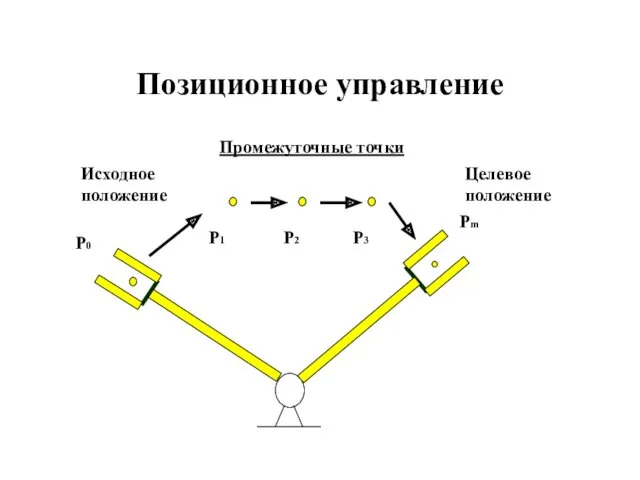
Позиционное управление
Исходное
положение
P0
Pm
Целевое положение
Промежуточные точки
P1
P2
P3
Позиционное управление
Исходное
положение
P0
Pm
Целевое положение
Промежуточные точки
P1
P2
P3

Позиционное управление:
роботизированная точечная сварка (COMAU Robot)
загрузка технологического оборудования (REIS
Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS
Контурное управление
Контурное управление (continuous path control, CP control):
Режим управления, при
Контурное управление
Контурное управление (continuous path control, CP control):
Режим управления, при
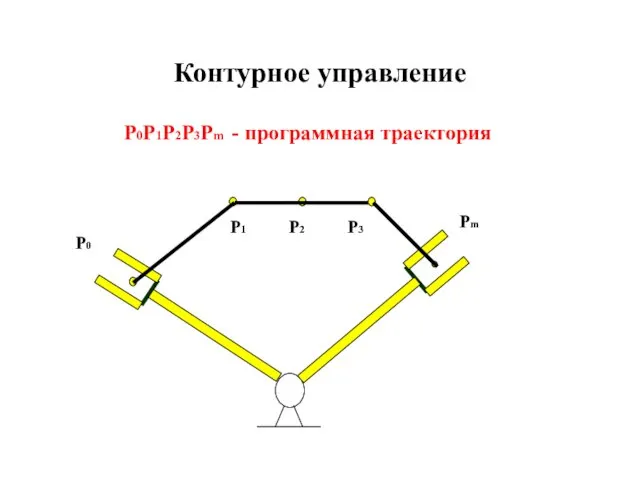
Контурное управление
P0
Pm
P0P1P2P3Pm - программная траектория
P1
P2
P3
Контурное управление
P0
Pm
P0P1P2P3Pm - программная траектория
P1
P2
P3
Траекторное управление
Траекторное управление (trajectory control) –
контурное управление с запрограммированным значением
Траекторное управление
Траекторное управление (trajectory control) –
контурное управление с запрограммированным значением
Траекторное управление
P0
Pm
P0P1P2P3Pm - программная траектория
V(t) – контурная скорость
P1
P2
P3
V
Программа движения задает
Траекторное управление
P0
Pm
P0P1P2P3Pm - программная траектория
V(t) – контурная скорость
P1
P2
P3
V
Программа движения задает

Траекторное управление :
роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
Траекторное управление :
роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
Адаптивное управление
Адаптивное управление (adaptive control):
Режим управления, при котором параметры системы
Адаптивное управление
Адаптивное управление (adaptive control):
Режим управления, при котором параметры системы

Адаптивное управление: Робототехнологический комплекс
(МГТУ Станкин - Будапештский ТУ)
1 – манипулятор PUMA-560,
Адаптивное управление: Робототехнологический комплекс
(МГТУ Станкин - Будапештский ТУ)
1 – манипулятор PUMA-560,
Адаптивное управление
(на основе информации о возмущающем воздействии)
Адаптивное управление
(на основе информации о возмущающем воздействии)
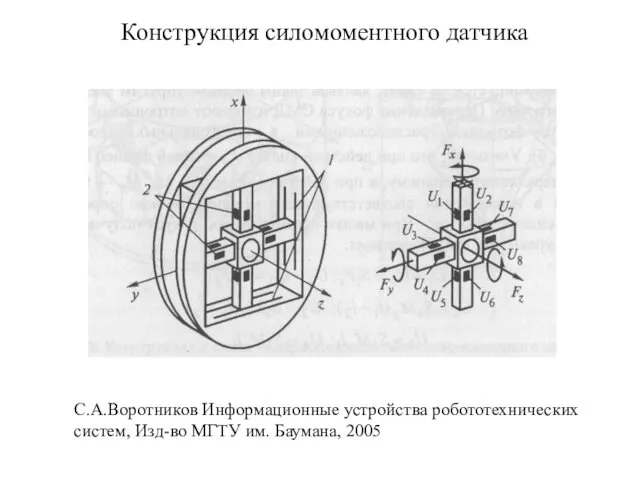
Конструкция силомоментного датчика
С.А.Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана,
Конструкция силомоментного датчика
С.А.Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана,
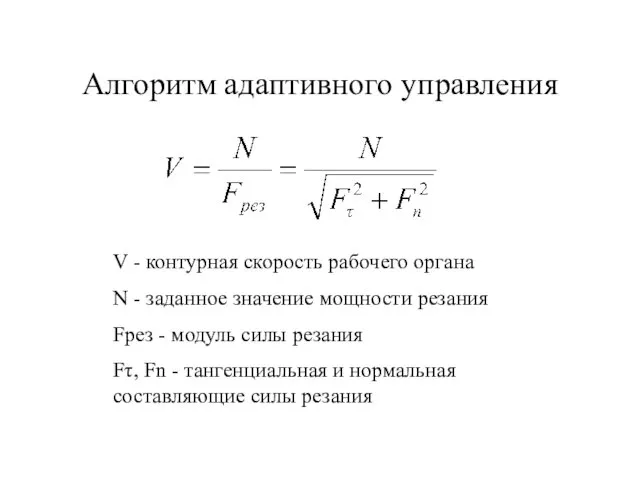
Алгоритм адаптивного управления
V - контурная скорость рабочего органа
N - заданное значение
Алгоритм адаптивного управления
V - контурная скорость рабочего органа
N - заданное значение
Методы интеллектуального управления
Нейронные сети
Нечеткая логика
Экспертные системы
Ассоциативная память
Методы интеллектуального управления
Нейронные сети
Нечеткая логика
Экспертные системы
Ассоциативная память
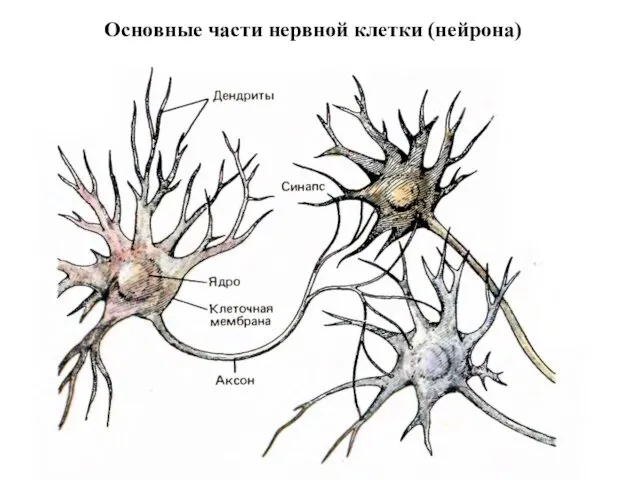
Основные части нервной клетки (нейрона)
Основные части нервной клетки (нейрона)
Нейроны головного мозга:
- общее кол-во клеток: 1012 (миллион миллионов)
- каждый нейрон
Нейроны головного мозга: - общее кол-во клеток: 1012 (миллион миллионов) - каждый нейрон
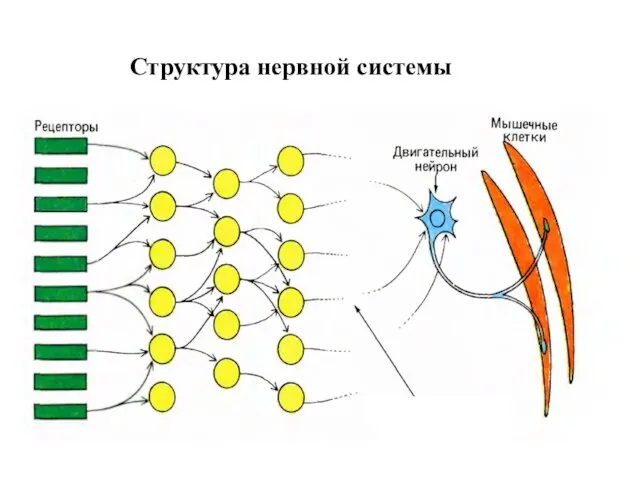
Структура нервной системы
Структура нервной системы

Интеллектуальное управление на основе искусственных нейронных сетей. Математическая модель нейрона
Σ
w1
wn
f
In1
In
Интеллектуальное управление на основе искусственных нейронных сетей. Математическая модель нейрона
Σ
w1
wn
f
In1
In
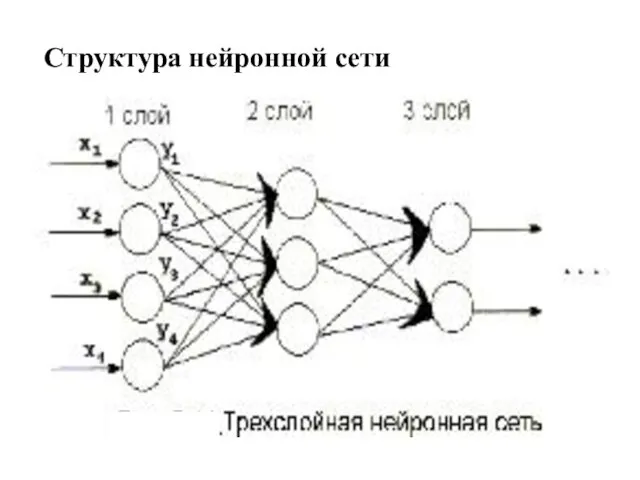
Структура нейронной сети
ANNs are taught by system developer at concrete cases.
Структура нейронной сети
ANNs are taught by system developer at concrete cases.
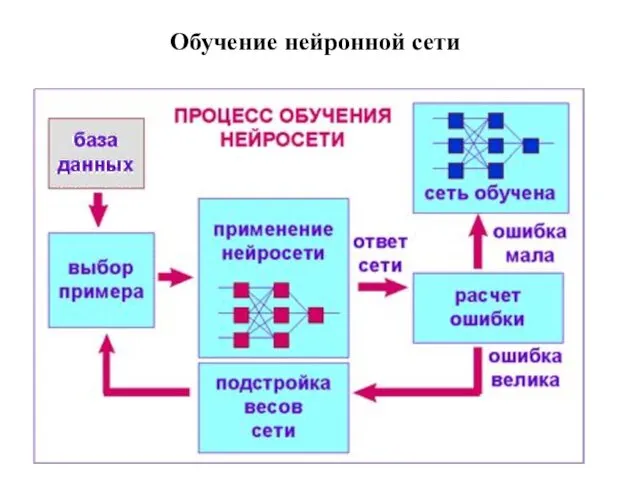
Обучение нейронной сети
Обучение нейронной сети
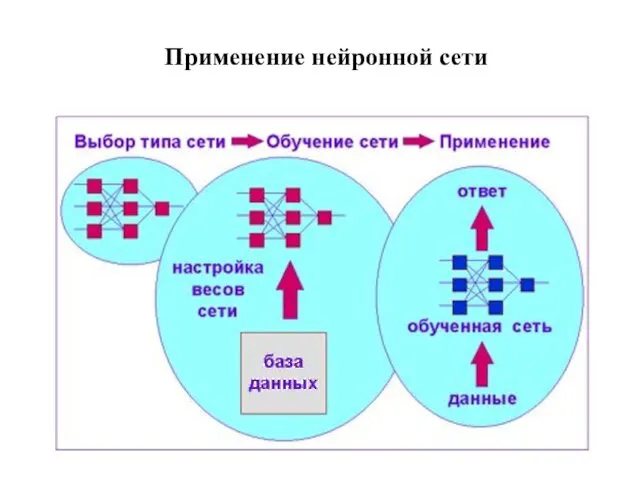
Применение нейронной сети
Применение нейронной сети
Пример применения нейросети в современной робототехнике
«От Текстовой Команды к Движению
Пример применения нейросети в современной робототехнике «От Текстовой Команды к Движению
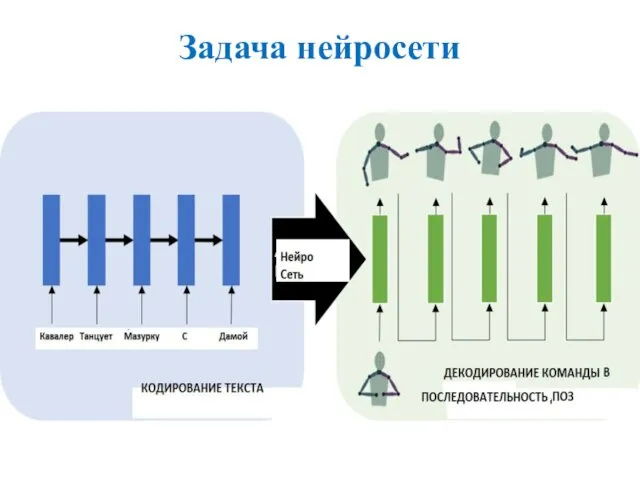
Задача нейросети
Задача нейросети
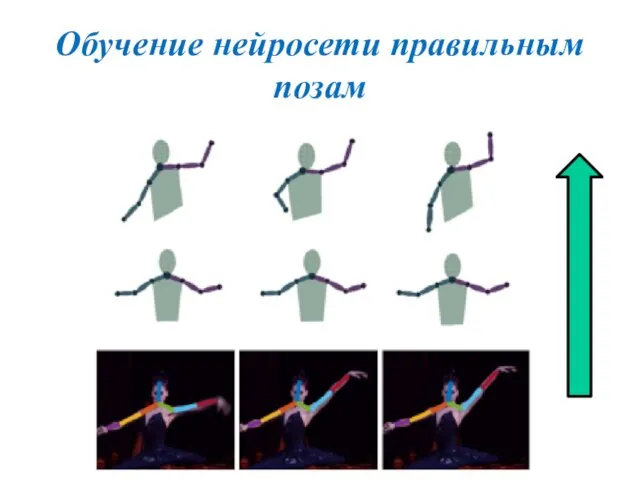
Обучение нейросети правильным позам
Обучение нейросети правильным позам
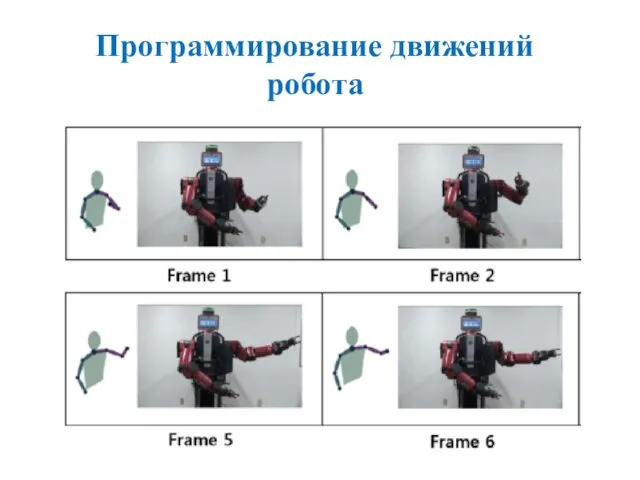
Программирование движений робота
Программирование движений робота
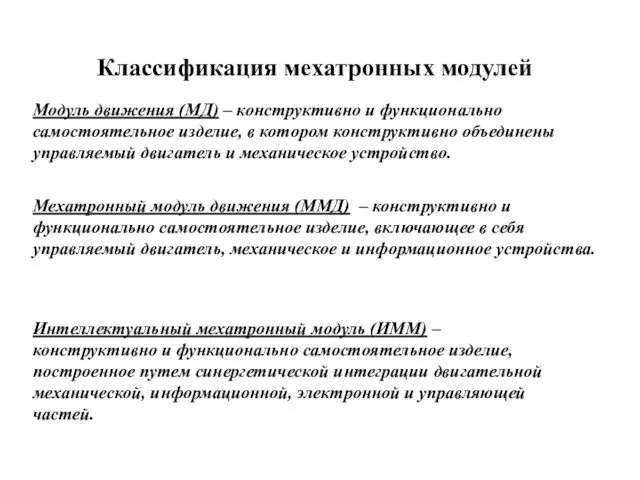
Классификация мехатронных модулей
Модуль движения (МД) – конструктивно и функционально самостоятельное изделие,
Классификация мехатронных модулей
Модуль движения (МД) – конструктивно и функционально самостоятельное изделие,

Классификация мехатронных модулей
Классификация мехатронных модулей

Модули движения: моторы-редукторы на базе асинхронных двигателей
(фирма Dunkermotoren)
Модули движения: моторы-редукторы на базе асинхронных двигателей
(фирма Dunkermotoren)
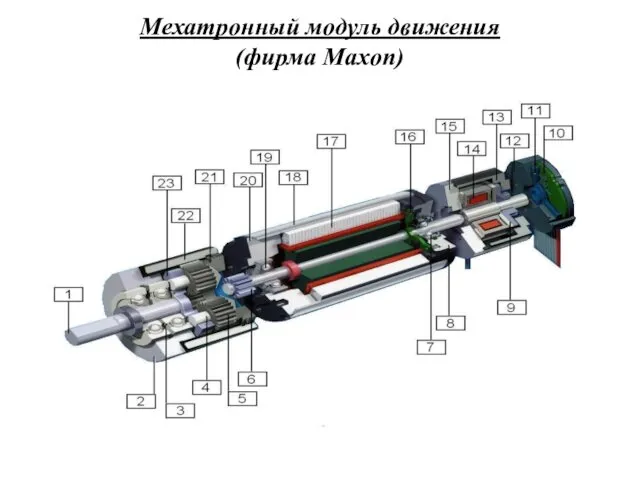
Мехатронный модуль движения
(фирма Maxon)
Мехатронный модуль движения
(фирма Maxon)

Интеллектуальный мехатронный модуль робота LWR KUKA
Интеллектуальный мехатронный модуль робота LWR KUKA
Сверхточные (ультрапрецизионные) движения в мехатронных системах
Сверхточные (ультрапрецизионные) движения в мехатронных системах
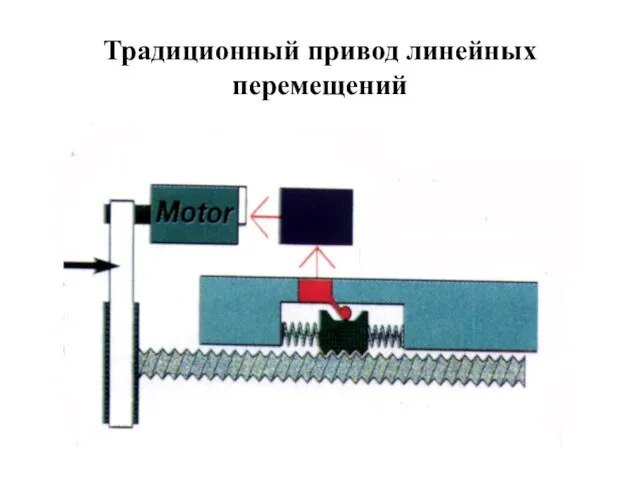
Традиционный привод линейных перемещений
Традиционный привод линейных перемещений
Недостатки традиционных модулей
большое количество промежуточных элементов от двигателя до конечного звена;
Недостатки традиционных модулей
большое количество промежуточных элементов от двигателя до конечного звена;

Линейные двигатели
(Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей.
с.101-106)
Линейные двигатели
(Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей.
с.101-106)
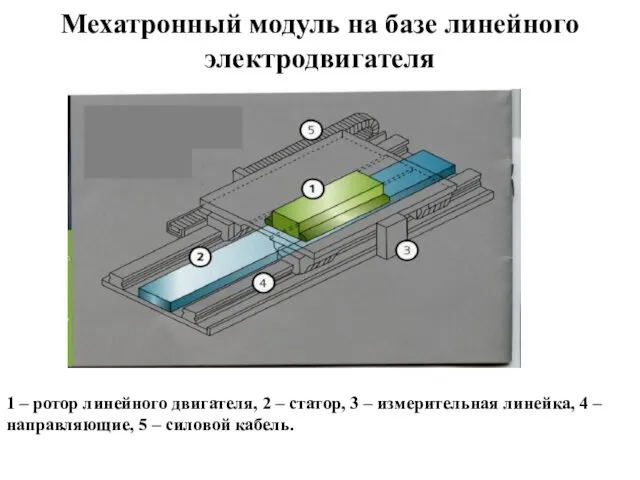
Мехатронный модуль на базе линейного электродвигателя
1 – ротор линейного двигателя, 2
Мехатронный модуль на базе линейного электродвигателя
1 – ротор линейного двигателя, 2
К основным преимуществам мехатронных модулей на базе ЛД можно отнести:
• высокие
К основным преимуществам мехатронных модулей на базе ЛД можно отнести:
• высокие
Кинематические задачи в робототехнике и мехатронике
- Прямая задача о положении многозвенного
Кинематические задачи в робототехнике и мехатронике - Прямая задача о положении многозвенного
Прямая задача о положении многозвенного механизма
Постановка задачи:
Определить
Прямая задача о положении многозвенного механизма
Постановка задачи:
Определить
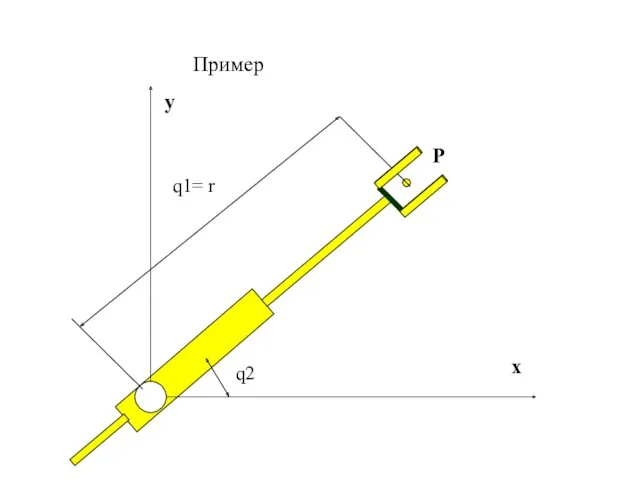
q1= r
q2
P
x
y
Пример
q1= r
q2
P
x
y
Пример
Пример: прямая задача о положении двухзвенного механизма
Пример: прямая задача о положении двухзвенного механизма
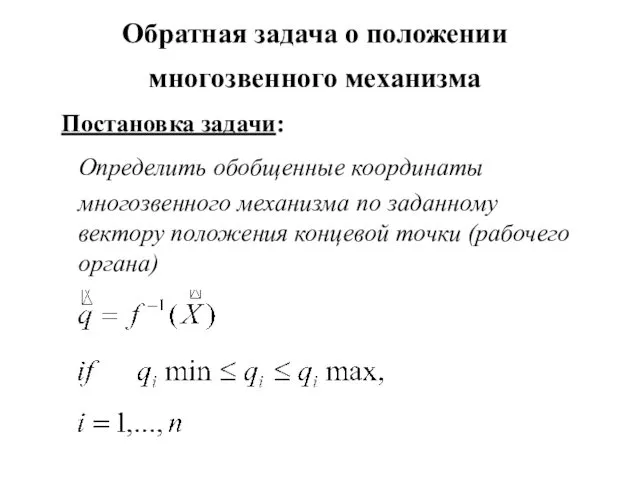
Обратная задача о положении многозвенного механизма
Постановка задачи:
Определить
Обратная задача о положении многозвенного механизма
Постановка задачи:
Определить
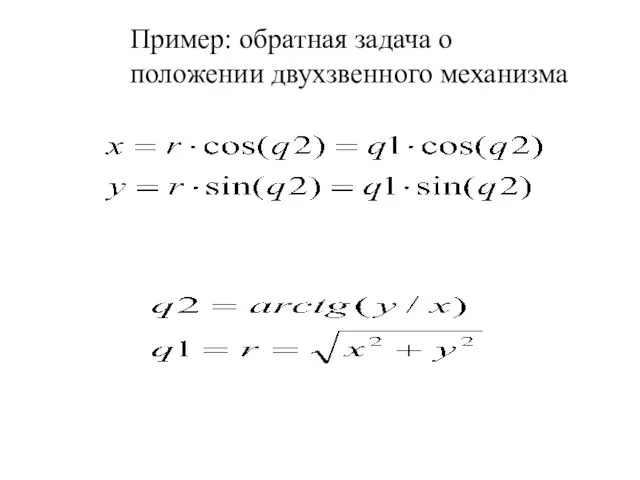
Пример: обратная задача о положении двухзвенного механизма
Пример: обратная задача о положении двухзвенного механизма
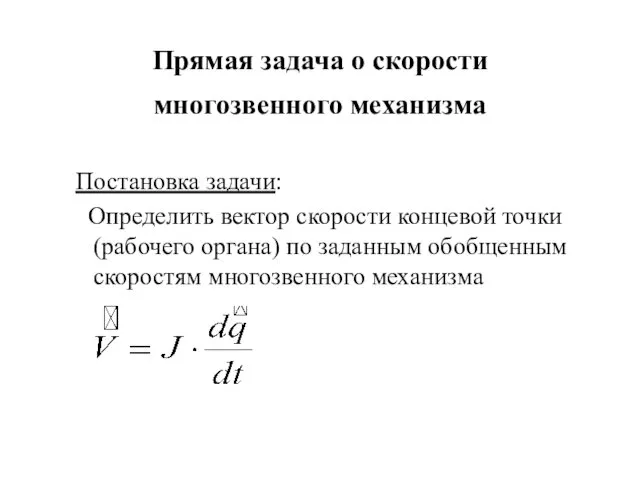
Прямая задача о скорости многозвенного механизма
Постановка задачи:
Определить
Прямая задача о скорости многозвенного механизма
Постановка задачи:
Определить
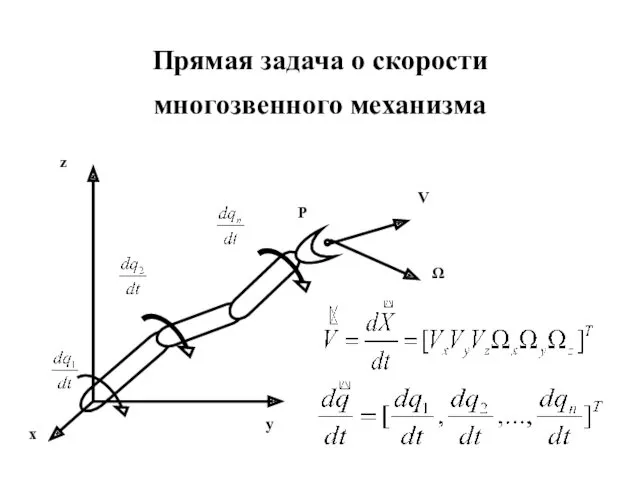
Прямая задача о скорости многозвенного механизма
z
y
x
P
V
Ω
Прямая задача о скорости многозвенного механизма
z
y
x
P
V
Ω
Пример : прямая задача о скорости двухзвенного механизма
Пример : прямая задача о скорости двухзвенного механизма
Определение точности позиционирования многозвенного механизма
Постановка задачи:
Определить вектор
Определение точности позиционирования многозвенного механизма
Постановка задачи:
Определить вектор
Погрешность позиционирования
Р – фактическое положение полюса рабочего органа, А – программное
Погрешность позиционирования
Р – фактическое положение полюса рабочего органа, А – программное
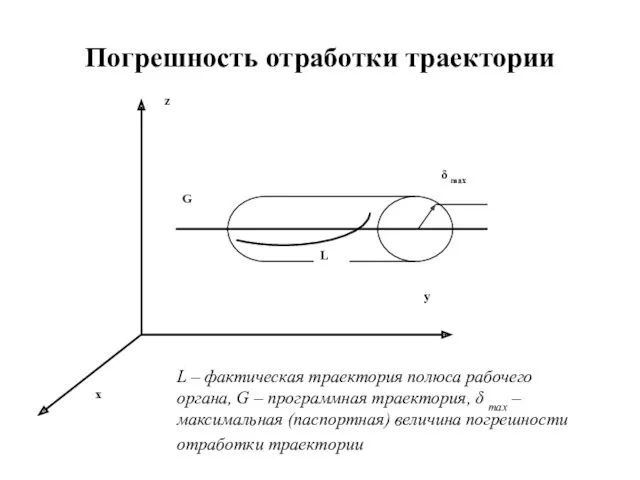
Погрешность отработки траектории
L – фактическая траектория полюса рабочего органа, G –
Погрешность отработки траектории
L – фактическая траектория полюса рабочего органа, G –
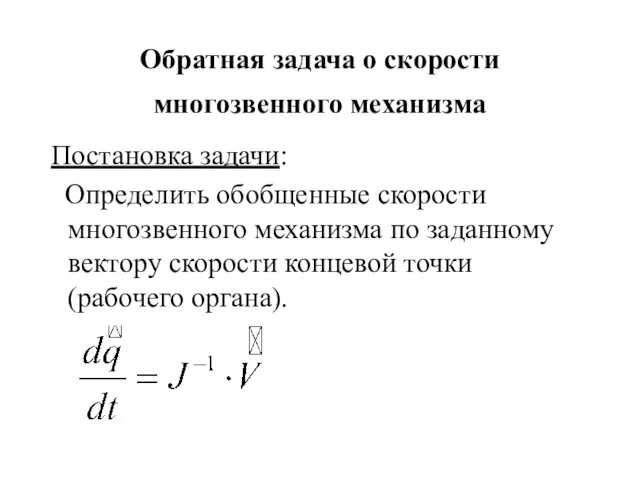
Обратная задача о скорости многозвенного механизма
Постановка задачи:
Определить
Обратная задача о скорости многозвенного механизма
Постановка задачи:
Определить
Пример : обратная задача о скорости двухзвенного механизма
Пример : обратная задача о скорости двухзвенного механизма
Определение дистанционного управления
Дистанционное управление
(remote control):
Управление роботом
Определение дистанционного управления
Дистанционное управление
(remote control):
Управление роботом
Методы дистанционного управления
Командное управление
Копирующее управление
Полуавтоматическое управление
Методы дистанционного управления
Командное управление
Копирующее управление
Полуавтоматическое управление
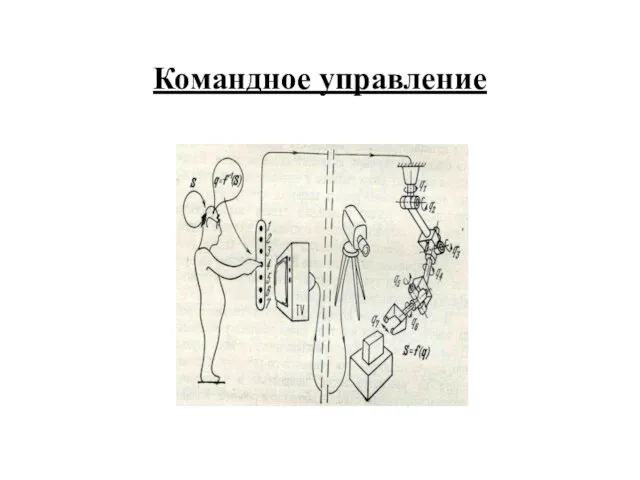
Командное управление
Командное управление
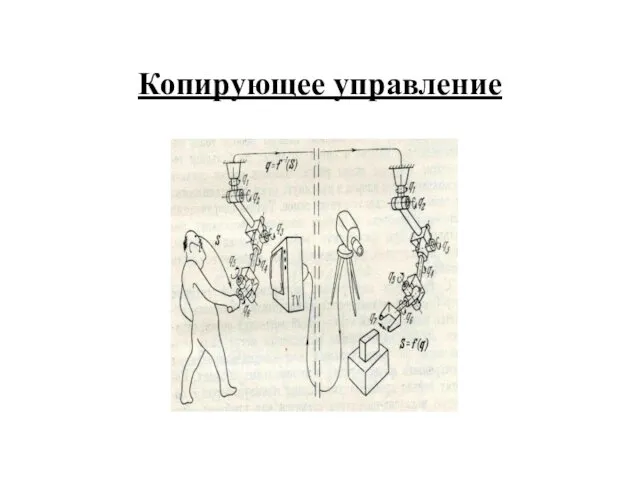
Копирующее управление
Копирующее управление
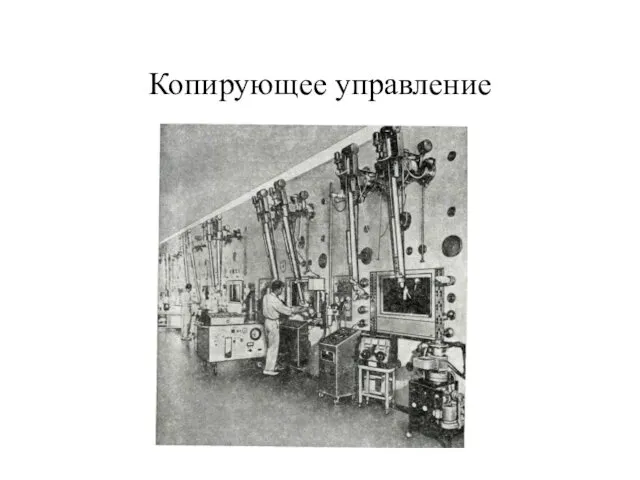
Копирующее управление
Копирующее управление
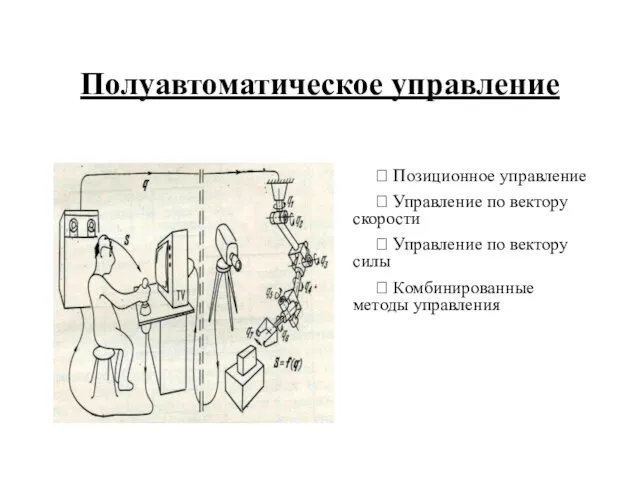
Полуавтоматическое управление
? Позиционное управление
? Управление по вектору скорости
?
Полуавтоматическое управление
? Позиционное управление
? Управление по вектору скорости
?
Доп слайды
Доп слайды
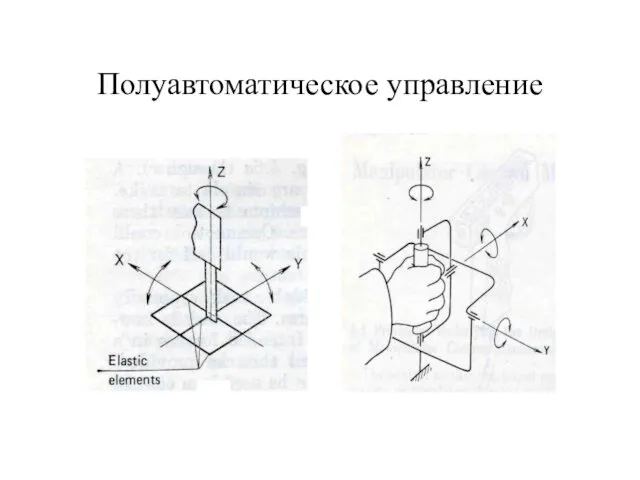
Полуавтоматическое управление
Полуавтоматическое управление
ОБЛАСТЬ ПРОФЕССИОНАЛЬНОЙ ДЕЯТЕЛЬНОСТИ ВЫПУСКНИКОВ, ОСВОИВШИХ ПРОГРАММУ БАКАЛАВРИАТА
(направление 15.03.06 Мехатроника и
ОБЛАСТЬ ПРОФЕССИОНАЛЬНОЙ ДЕЯТЕЛЬНОСТИ ВЫПУСКНИКОВ, ОСВОИВШИХ ПРОГРАММУ БАКАЛАВРИАТА
(направление 15.03.06 Мехатроника и
ОБЪЕКТЫ ПРОФЕССИОНАЛЬНОЙ ДЕЯТЕЛЬНОСТИ ВЫПУСКНИКОВ, ОСВОИВШИХ ПРОГРАММУ БАКАЛАВРИАТА
(направление 15.03.06 Мехатроника и
ОБЪЕКТЫ ПРОФЕССИОНАЛЬНОЙ ДЕЯТЕЛЬНОСТИ ВЫПУСКНИКОВ, ОСВОИВШИХ ПРОГРАММУ БАКАЛАВРИАТА
(направление 15.03.06 Мехатроника и
II – мехатронные модули
I – элементы мехатронных модулей
Ш – мехатронные
II – мехатронные модули
I – элементы мехатронных модулей
Ш – мехатронные

Адаптивное управление
Внешняя
среда
Управляющее
устройство
Объект
управления
Изменения:
1.Параметры
регулятора
(Kp , Ki , Kd
Адаптивное управление
Внешняя
среда
Управляющее
устройство
Объект
управления
Изменения:
1.Параметры
регулятора
(Kp , Ki , Kd
Структура нервной системы
Структура нервной системы
Актуальные документы и нормативные акты по развитию отечественной робототехники
1. Стратегия научно-технологического
Актуальные документы и нормативные акты по развитию отечественной робототехники
1. Стратегия научно-технологического
Стратегия научно-технологического развития Российской Федерации
(утверждена Указом Президента Российской Федерации от 1
Стратегия научно-технологического развития Российской Федерации
(утверждена Указом Президента Российской Федерации от 1
Внести в приоритетные направления развития науки, технологий и техники в Российской
Внести в приоритетные направления развития науки, технологий и техники в Российской
Робототехника –перспективное профессия на ближайшие годы
Атлас новых профессий, подготовленный экспертами Московской
Робототехника –перспективное профессия на ближайшие годы
Атлас новых профессий, подготовленный экспертами Московской
Проектировщик промышленной
робототехники
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
робототехники
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
Оператор многофункциональных робототехнических комплексов
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
Проектировщик домашних роботов
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
Проектировщик медицинских роботов
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
РОБОТОТЕХНИКА.
АТЛАС НОВЫХ ПРОФЕССИЙ
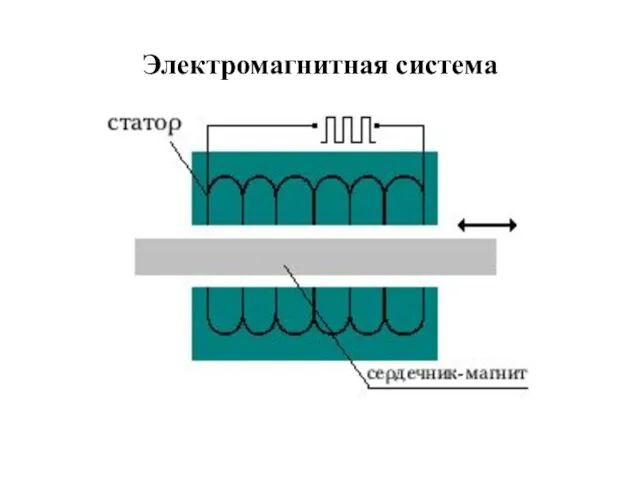
Электромагнитная система
Электромагнитная система
 Портфолио. Шавлак Виктория Александровна. Дизайнер, швея
Портфолио. Шавлак Виктория Александровна. Дизайнер, швея Симплексний метод розв'язання задач лінійного програмування. Транспортна задача. Лек. 4
Симплексний метод розв'язання задач лінійного програмування. Транспортна задача. Лек. 4 Свойства радиоактивных веществ и ионизирующих излучений
Свойства радиоактивных веществ и ионизирующих излучений Способы получения металлов
Способы получения металлов Возвещаем о спасении через веру во Христа и готовим Его учеников на личных встречах
Возвещаем о спасении через веру во Христа и готовим Его учеников на личных встречах Презентация родительское собрание Моя первая оценка
Презентация родительское собрание Моя первая оценка Өзараауысымдылық және тегіс цилиндрлік біріктірулерді бақылау
Өзараауысымдылық және тегіс цилиндрлік біріктірулерді бақылау Методическая разработка по теме Уроки дорожного движения для малышей
Методическая разработка по теме Уроки дорожного движения для малышей Презентация по органической химии Алкины
Презентация по органической химии Алкины Способы эксплуатации нефтяных и газовых скважин
Способы эксплуатации нефтяных и газовых скважин Завершальний етап ліквідації поліомієліту. Перехід до бОПВ
Завершальний етап ліквідації поліомієліту. Перехід до бОПВ Сепсис. Септический шок
Сепсис. Септический шок С праздником 8 марта
С праздником 8 марта Философия нового времени. Лекция 6
Философия нового времени. Лекция 6 New Geant4 based simulation tools for space radiation shielding and effects analysis
New Geant4 based simulation tools for space radiation shielding and effects analysis Динамические характеристики и особенности управления. Автоматизированное управление ХТС. Лекция 7
Динамические характеристики и особенности управления. Автоматизированное управление ХТС. Лекция 7 Внешность и характер
Внешность и характер 20230918_prezentatsiya_smyslovoe_chtenie
20230918_prezentatsiya_smyslovoe_chtenie презентация к классному часу Край мой родной, Забайкалье!
презентация к классному часу Край мой родной, Забайкалье! Как делают муку
Как делают муку Презентация для детей дошкольного возраста на тему: Генеологическое древо
Презентация для детей дошкольного возраста на тему: Генеологическое древо Портфолио заместителя директора по УВР
Портфолио заместителя директора по УВР Кристаллы вокруг нас
Кристаллы вокруг нас Внеклассное чтение для детей 7 - 10 лет
Внеклассное чтение для детей 7 - 10 лет Принцип работы профилемеров
Принцип работы профилемеров Анализ аптечного ассортимента лекарственного растительного сырья, содержащего эфирные масла и препаратов из него
Анализ аптечного ассортимента лекарственного растительного сырья, содержащего эфирные масла и препаратов из него My favourite food
My favourite food Функциональная структура психики
Функциональная структура психики