- Основы микропроцессорной техники. Лекция 1

Содержание
- 2. Базовые определения Сигнал — любая физическая величина (например, температура, давление воздуха, интенсивность света, сила тока и
- 3. Физическими аналогами цифр 0 и 1 служат сигналы способные принимать два хорошо различимых значения представленных, например,
- 4. Электронное устройство (система) Электронная система – это любой электронный узел, блок, прибор или комплекс производящий обработку
- 5. Виды цифровых сигналов Одиночные цифровые сигналы: Разрешающие/запрещающие сигналы; Сигнализирующие сигналы (флаги); Синхронизирующие сигналы (определяющие момент времени
- 6. Универсальное цифровое устройство
- 7. Основные определения используемые при описании электронной системы Задача – это набор функций, выполнение которых требуется от
- 8. Понятие схемотехники Аналоговая схемотехника – предназначена для работы с непрерывным представлением обрабатываемого сигнала. Характеризуется максимальным быстродействием,
- 9. Декомпозиция вычислительного устройства Операционный блок – совокупность электронных устройств (регистров, сумматоров и других узлов), производящих приём
- 10. Структура и архитектура вычислительных (микропроцессорных) систем
- 11. Типовая структура вычислительной системы Структура вычислительной системы – это некоторая модель, устанавливающая состав, порядок и принципы
- 12. Шина адреса – служит для определения адреса (номера устройства) с которым микропроцессор обменивается в данный момент
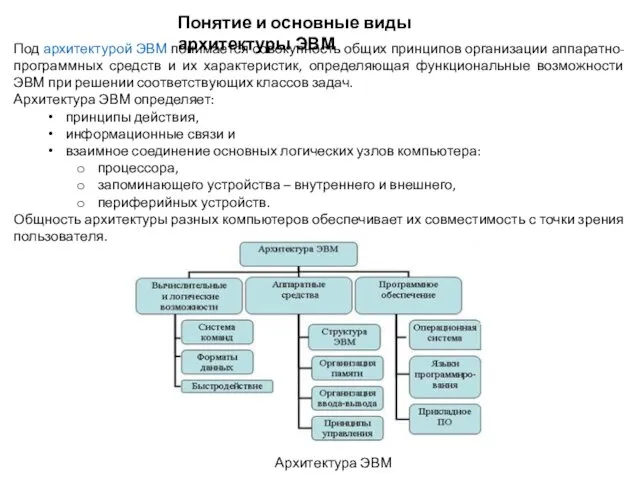
- 13. Понятие и основные виды архитектуры ЭВМ Под архитектурой ЭВМ понимается совокупность общих принципов организации аппаратно-программных средств
- 14. В настоящее время наибольшее распространение в ЭВМ получили 2 типа архитектуры: – Принстонская (фон Неймана) и
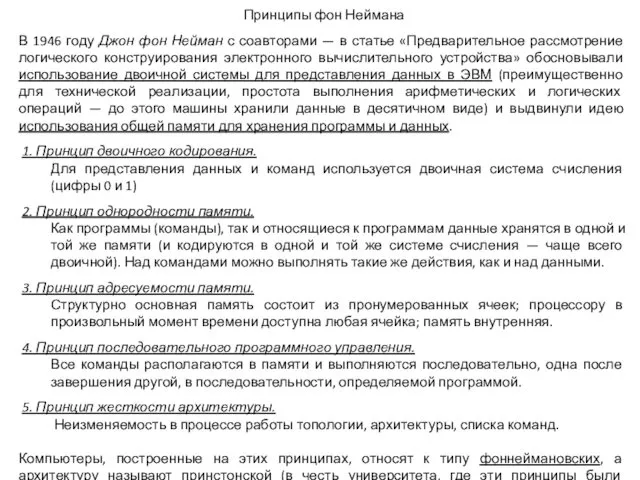
- 15. Принципы фон Неймана В 1946 году Джон фон Нейман с соавторами — в статье «Предварительное рассмотрение
- 16. Классическая принстонская архитектура Принстонская архитектура — архитектура микропроцессорной системы с единой шиной для данных и команд
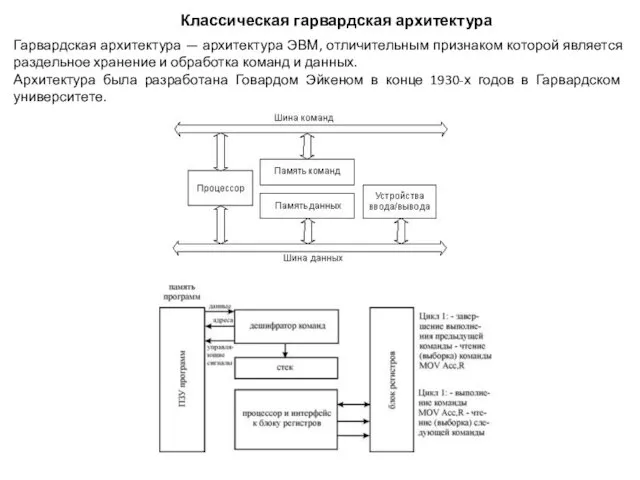
- 17. Классическая гарвардская архитектура Гарвардская архитектура — архитектура ЭВМ, отличительным признаком которой является раздельное хранение и обработка
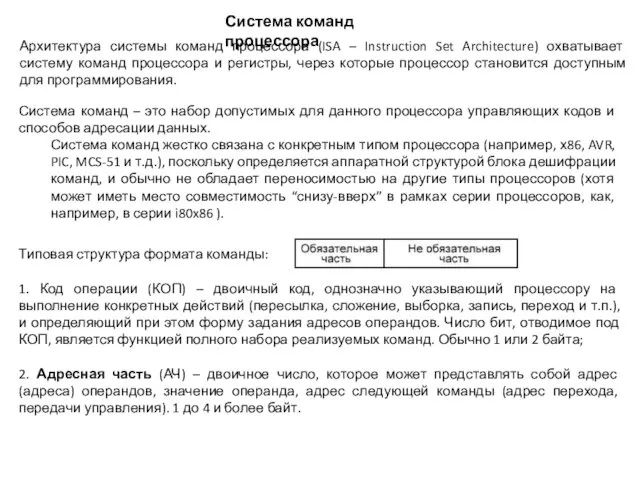
- 18. Система команд процессора Архитектура системы команд процессора (ISA – Instruction Set Architecture) охватывает систему команд процессора
- 19. Машинные команды, выполняемые процессором, обычно подразделяются следующим образом: ‒ передача данных (из регистра в регистр, из
- 20. Классификация команд микропроцессора
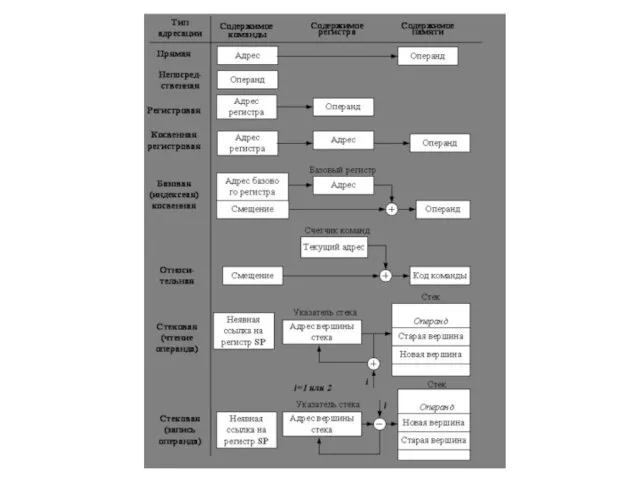
- 21. Режимы адресации Режим адресации памяти — это процедура или схема преобразования адресной информации об операнде в
- 23. В зависимости от набора и порядка выполнения команд процессоры подразделяются на два основных класса, отражающих также
- 25. Скачать презентацию
Базовые определения
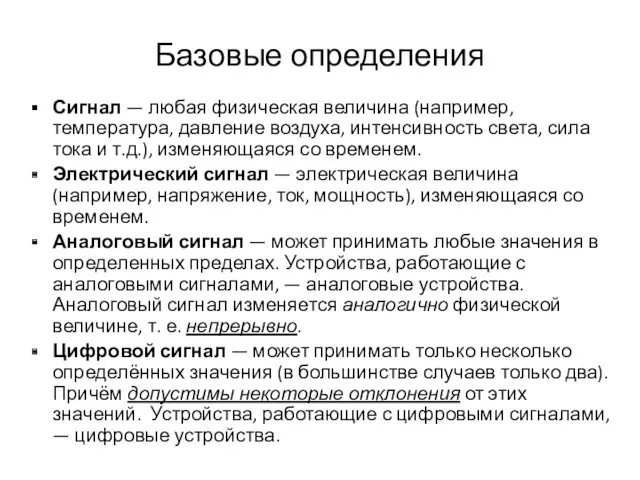
Сигнал — любая физическая величина (например, температура, давление воздуха, интенсивность
Базовые определения
Сигнал — любая физическая величина (например, температура, давление воздуха, интенсивность
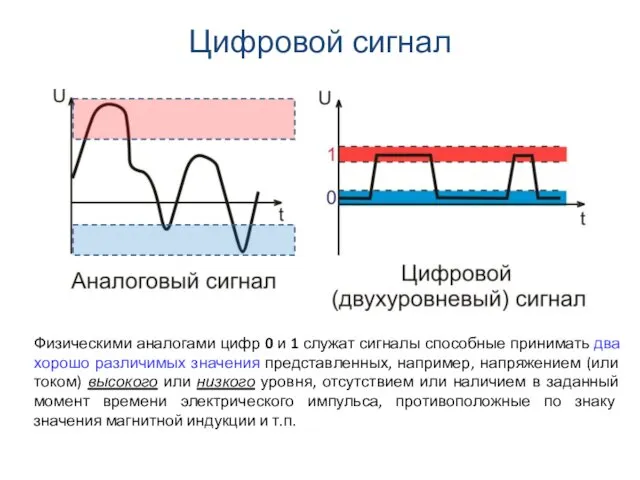
Физическими аналогами цифр 0 и 1 служат сигналы способные принимать два
Физическими аналогами цифр 0 и 1 служат сигналы способные принимать два

Электронное устройство (система)
Электронная система – это любой электронный узел, блок, прибор
Электронное устройство (система)
Электронная система – это любой электронный узел, блок, прибор
Виды цифровых сигналов
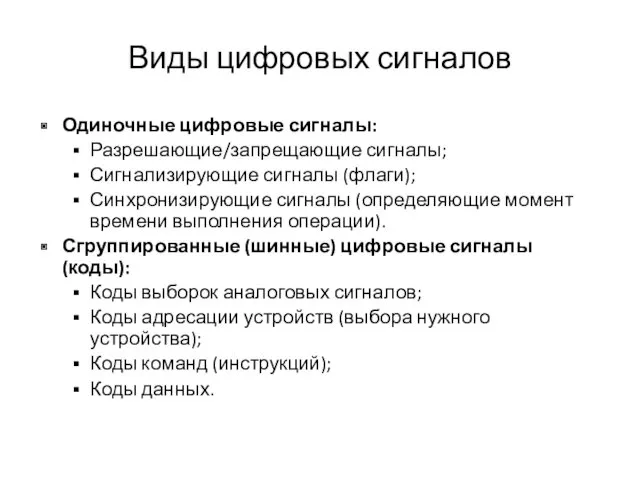
Одиночные цифровые сигналы:
Разрешающие/запрещающие сигналы;
Сигнализирующие сигналы (флаги);
Синхронизирующие сигналы (определяющие момент
Виды цифровых сигналов
Одиночные цифровые сигналы:
Разрешающие/запрещающие сигналы;
Сигнализирующие сигналы (флаги);
Синхронизирующие сигналы (определяющие момент
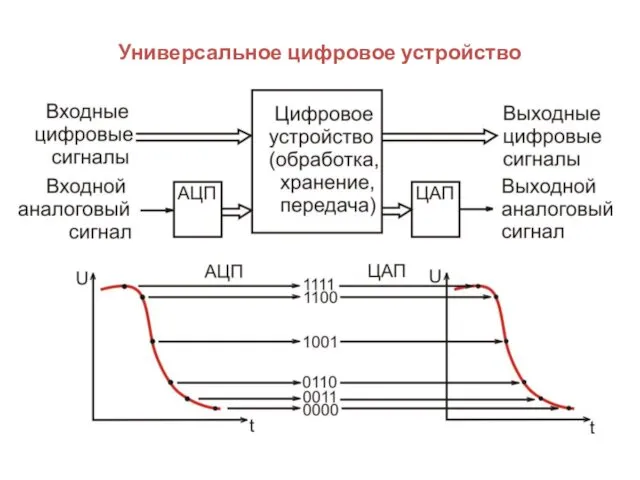
Универсальное цифровое устройство
Универсальное цифровое устройство
Основные определения используемые при описании электронной системы
Задача – это набор функций,
Основные определения используемые при описании электронной системы
Задача – это набор функций,
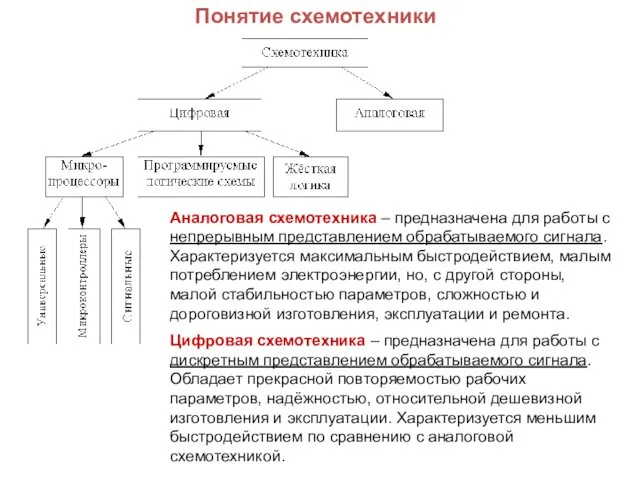
Понятие схемотехники
Аналоговая схемотехника – предназначена для работы с непрерывным представлением обрабатываемого
Понятие схемотехники
Аналоговая схемотехника – предназначена для работы с непрерывным представлением обрабатываемого
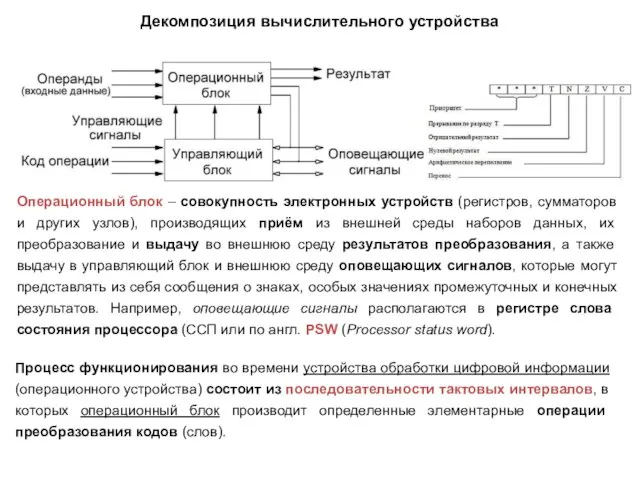
Декомпозиция вычислительного устройства
Операционный блок – совокупность электронных устройств (регистров, сумматоров и
Декомпозиция вычислительного устройства
Операционный блок – совокупность электронных устройств (регистров, сумматоров и
Структура и архитектура вычислительных (микропроцессорных) систем
Структура и архитектура вычислительных (микропроцессорных) систем

Типовая структура вычислительной системы
Структура вычислительной системы – это некоторая модель,
Типовая структура вычислительной системы
Структура вычислительной системы – это некоторая модель,
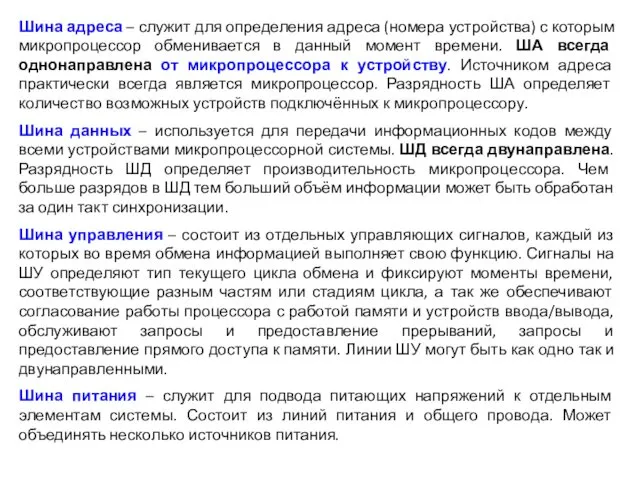
Шина адреса – служит для определения адреса (номера устройства) с которым
Шина адреса – служит для определения адреса (номера устройства) с которым
Понятие и основные виды архитектуры ЭВМ
Под архитектурой ЭВМ понимается совокупность общих
Понятие и основные виды архитектуры ЭВМ
Под архитектурой ЭВМ понимается совокупность общих
В настоящее время наибольшее распространение в ЭВМ получили 2 типа архитектуры:
В настоящее время наибольшее распространение в ЭВМ получили 2 типа архитектуры:
Принципы фон Неймана
В 1946 году Джон фон Нейман с
Принципы фон Неймана
В 1946 году Джон фон Нейман с

Классическая принстонская архитектура
Принстонская архитектура — архитектура микропроцессорной системы с единой шиной
Классическая принстонская архитектура
Принстонская архитектура — архитектура микропроцессорной системы с единой шиной
Классическая гарвардская архитектура
Гарвардская архитектура — архитектура ЭВМ, отличительным признаком которой является
Классическая гарвардская архитектура
Гарвардская архитектура — архитектура ЭВМ, отличительным признаком которой является
Система команд процессора
Архитектура системы команд процессора (ISA – Instruction Set Architecture)
Система команд процессора
Архитектура системы команд процессора (ISA – Instruction Set Architecture)
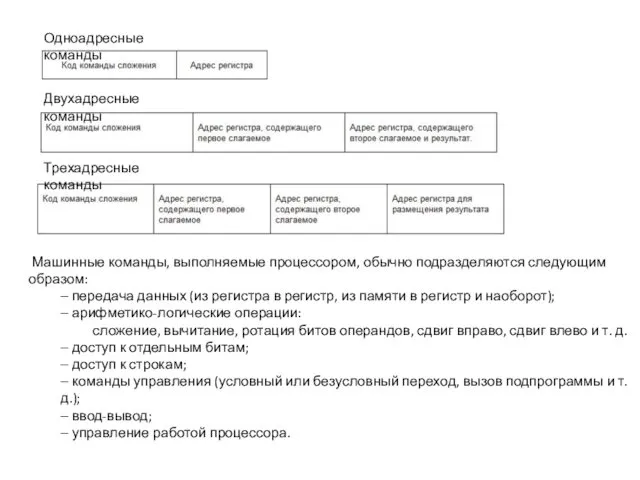
Машинные команды, выполняемые процессором, обычно подразделяются следующим образом:
‒ передача
Машинные команды, выполняемые процессором, обычно подразделяются следующим образом:
‒ передача
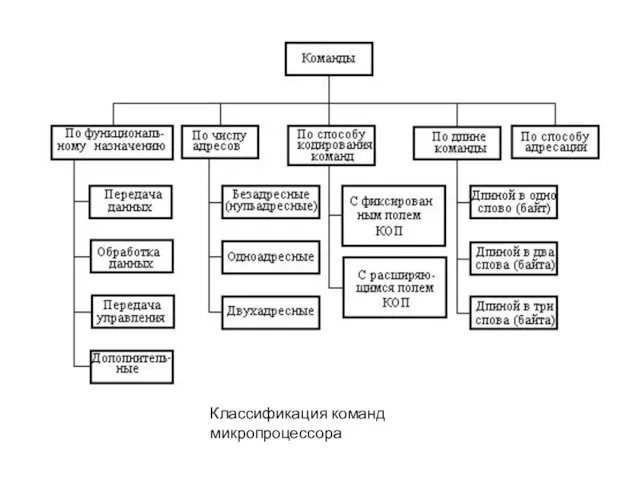
Классификация команд микропроцессора
Классификация команд микропроцессора
Режимы адресации
Режим адресации памяти — это процедура или схема преобразования адресной
Режимы адресации
Режим адресации памяти — это процедура или схема преобразования адресной
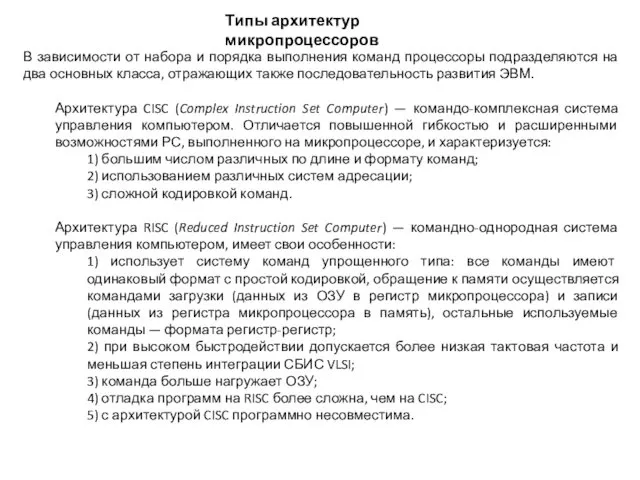
В зависимости от набора и порядка выполнения команд процессоры подразделяются на
В зависимости от набора и порядка выполнения команд процессоры подразделяются на
 Физиология высшей нервной деятельности
Физиология высшей нервной деятельности Электростатика. Постоянный ток. Лекция 4
Электростатика. Постоянный ток. Лекция 4 С днем рождения дорогая бабушка
С днем рождения дорогая бабушка Сравнение, сложение и вычитание дробей с разными знаменателями
Сравнение, сложение и вычитание дробей с разными знаменателями Презентация к классному часу 1 сентября
Презентация к классному часу 1 сентября Стандартизация и сертификация
Стандартизация и сертификация Визитка 2 класса А
Визитка 2 класса А Чрезвычайные ситуации природного и техногенного характера. Причины и возможные последствия их возникновения
Чрезвычайные ситуации природного и техногенного характера. Причины и возможные последствия их возникновения Характеристика детей с различными типами темперамента. Учет свойств темперамента в воспитательно-образовательной работе с дошкольниками как профилактика школьной дезадаптации (презентация)
Характеристика детей с различными типами темперамента. Учет свойств темперамента в воспитательно-образовательной работе с дошкольниками как профилактика школьной дезадаптации (презентация) Религиозные объединения и организации в Российской Федерации
Религиозные объединения и организации в Российской Федерации Организация транспортного процесса перевозки грузов в условиях ООО РусМетСтрой г. Рязань
Организация транспортного процесса перевозки грузов в условиях ООО РусМетСтрой г. Рязань Источники права в Объединенных Арабских Эмиратах
Источники права в Объединенных Арабских Эмиратах презентация к уроку технологии 1 класс
презентация к уроку технологии 1 класс Добренко
Добренко Презентация. Правильные и неправильные дроби. Математика. 5 класс
Презентация. Правильные и неправильные дроби. Математика. 5 класс Презентация Приобщение детей к народному творчеству
Презентация Приобщение детей к народному творчеству Комплексная игровая площадка в микрорайоне Орский городок
Комплексная игровая площадка в микрорайоне Орский городок Влияние алкоголизма на организм человека
Влияние алкоголизма на организм человека Общая фармакология
Общая фармакология Обеспечение качества иммуноферментного анализа
Обеспечение качества иммуноферментного анализа Конструювання нежорсткого дорожнього одягу. Лекція №9
Конструювання нежорсткого дорожнього одягу. Лекція №9 65 лет сельской библиотеке
65 лет сельской библиотеке Многоугольники
Многоугольники B-лимфоциты
B-лимфоциты Технология производства этикеточной продукции
Технология производства этикеточной продукции Факторы производства
Факторы производства Корней Иванович Чуковский. Урок внеклассного чтения. (2 класс)
Корней Иванович Чуковский. Урок внеклассного чтения. (2 класс) Поздравление с Новым 2020 годом
Поздравление с Новым 2020 годом