Основы проектирования космических аппаратов (КА) с электрореактивными двигательными установками малой тяги (ЭРДУ МТ) презентация
- Основы проектирования космических аппаратов (КА) с электрореактивными двигательными установками малой тяги (ЭРДУ МТ)

Содержание
- 2. Раздел 1. Основные классы электрореактивных двигателей (ЭРД). Постановки задач проектной оптимизации КА с ЭРД. В последние
- 3. Одним из возможных путей решения этой задачи является использование для космических миссий перспективных двигательных систем, основанных
- 4. Высокая скорость истечения реактивной струи (15 – 70 км/с), характерная для этого типа двигателей (в 5
- 5. Длительные и энергетически напряженные межорбитальные перелеты КА с ЭРД требуют использования энергоустановок, обеспечивающих значительную электрическую мощность.
- 6. Принципиальное отличие электрореактивных двигателей от термохимических заключается в том, что тяга у них создается не в
- 7. Отличительными особенностями ЭРД являются их малая тяга (0.01..0.1 Н) и способность к длительному функционированию (до 10000
- 8. Двумя основными компонентами электрореактивной двигательной установки (ЭРДУ) являются энергетическая установка и устройство, создающее тягу (собственно электрореактивный
- 9. Выдающиеся ученые, внесшие вклад в разработку конструкций и способов применения ЭРДУ в космосе К.Э. Циолковский В.П.
- 10. В настоящее время в ЭРДУ используются различные принципы ускорения рабочего тела. Современные ЭРД классифицируются как по
- 11. Электрореактивные двигатели делятся на три основных класса. 1) электротермические ‑ энергия используется для нагрева рабочего тела,
- 12. Рис. 1.1. Схема электротермического (электродугового) реактивного двигателя: 1 - вводы системы охлаждения Рис. 1.2. Обобщенная схема
- 13. Рис. 1.3. Схема электродинамического ЭРД с непрерывной плазменной струей: 1 - ввод рабочего вещества и дуговой
- 14. Рис. 1.5 Общий вид ионного двигателя конструкции Г. Кауфмана Рис. 1.6 Общий вид электрореактивного двигателя СПД-100
- 15. Важнейшими техническими характеристиками ЭРД являются: электрическая мощность, потребляемая двигателем NЭРД; величина развиваемой тяги P; эффективная скорость
- 16. Основные соотношения (формула Циолковского)
- 17. Лекция 2. Области применения ЭРД в космосе. Проектный облик межорбитальных транспортных аппаратов с ЭРД Deep Space
- 19. SMART 1 На КА Европейского космического агентства SMART-1 (2003-2005) двигатель PPS-1350 был использован для полета к
- 20. BepiColombo – миссия к Меркурию BepiColombo – совместная космическая автоматическая миссия к Меркурию Европейского космического агентства
- 21. Проект универсальной космической ступени с ЭРДУ - SEPS Рис. 1.7 – Универсальная ступень SEPS: 1 –
- 22. Многоразовый межорбитальный буксир (ММБ) с электроракетной двигательной установкой и с солнечной энергоустановкой мощностью 400 кВт
- 23. Лекция 3. Проектные модели для выбора основных параметров КА с ЭРДУ Состав КА с ЭРДУ Конструкция
- 24. Укрупнённая массовая сводка КА с ЭРДУ M0 = МПН + МЭДУ + МРТ , МЭДУ ‑
- 25. Мощность энергоустановки - энергетический коэффициент полезного действия. NР - мощность реактивной струи, истекающей из двигателя. -
- 26. Критерии оптимальности в механике космического полёта с малой тягой. Задача о максимуме массы полезной нагрузки Решения
- 27. Максимум полезной массы соответствует минимуму интеграла Оптимальная мощность энергоустановки соответствует максимальной полезной нагрузке при фиксированном значении
- 28. 2. Модель ЭРД с нерегулируемой тягой Тяга ЭРД либо достигает максимального значения Pmax , либо равняется
- 29. 1. Разворот корпуса КА вместе с жестко закрепленным блоком ЭРД. Способы реализации: а) использование специальных двигателей
- 30. 3. Разворот блока ЭРД независимо от ориентации корпуса КА. Способы реализации: установка специальной штанги (цилиндрический шарнир)
- 31. MSEPS = 3757 кг, МРТ = 1500 кг, МПН = 1000 кг (ГСО), MСухКон = 1257
- 32. Проектные параметры буксира с мощностью энергоустановки 400 кВт В качестве источника энергии рассматривались СБ на основе
- 33. Технические характеристики современных тяговых модулей большой мощности
- 34. Рис. 1.9 - Баллистическая схема межорбитального перелета без возвращения (A) Рис. 1.10 - Баллистическая схема межорбитального
- 35. A. Если цель перелёта КА - доставка максимально возможной полезной нагрузки с исходной на рабочую орбиту,
- 36. В момент отлета с рабочей орбиты (t = T2): В момент окончания миссии (t = T):
- 37. Оптимизируемые параметры 1. Параметры, характеризующие баллистическую схему перелёта Здесь: b – вектор баллистических параметров, принадлежащий множеству
- 38. 2. Параметры, характеризующие проектный облик КА Здесь: - вектор основных проектных параметров, определяющих облик МТА, Р
- 39. - масса системы подачи и хранения рабочего тела; - объем рабочего тела; - количество баков РТ
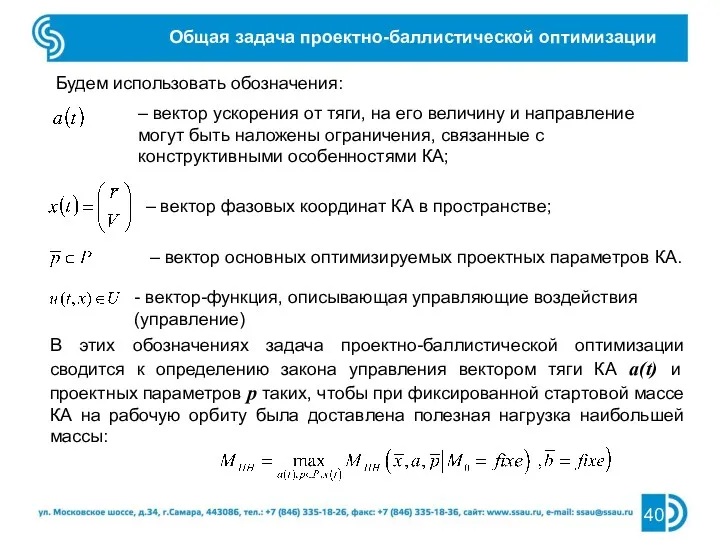
- 40. Будем использовать обозначения: – вектор ускорения от тяги, на его величину и направление могут быть наложены
- 41. Разделение общей задачи оптимизации Задача проектно-баллистической оптимизации условно разделяется на три части: динамическую, параметрическую и баллистическую.
- 42. Параметрическая задача – это задача выбора оптимальных проектных параметров КА, обеспечивающих при заданной динамической характеристике перелета
- 43. Задачи проектной и баллистической оптимизации могут решаться с использованием моделей различной степени точности. Естественно чем точнее
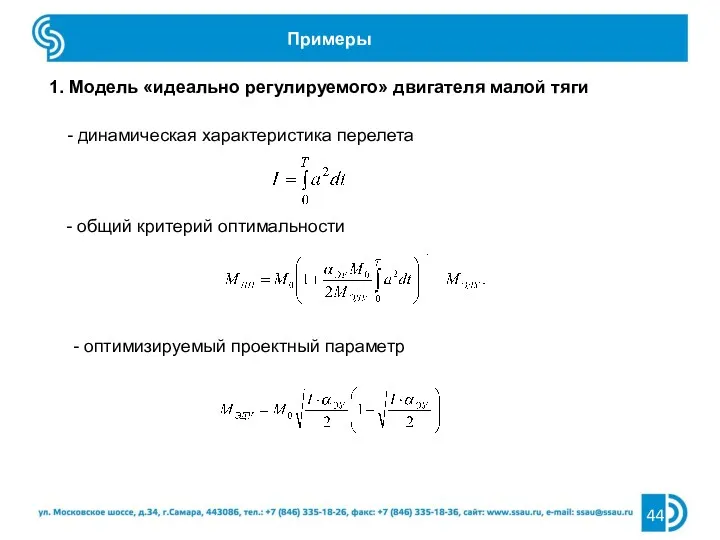
- 44. Примеры 1. Модель «идеально регулируемого» двигателя малой тяги - динамическая характеристика перелета - общий критерий оптимальности
- 45. 2. Модель ЭРД с нерегулируемой тягой - динамическая характеристика перелета Перелет между некомпланарными круговыми орбитами (r0
- 46. - общий критерий оптимальности - оптимизируемые проектные параметры P, c P - суммарная тяга ЭРД –
- 47. 1. Общей задачей совместной оптимизации будем называть задачу отыскания проектных параметров p ∈ P и совокупности
- 48. 2. Вектор параметров ∈ P будем называть универсальным для диапазона динамических маневров Z, если: • космический
- 50. Скачать презентацию
Раздел 1. Основные классы электрореактивных двигателей (ЭРД). Постановки задач проектной оптимизации
Раздел 1. Основные классы электрореактивных двигателей (ЭРД). Постановки задач проектной оптимизации
Одним из возможных путей решения этой задачи является использование для космических
Одним из возможных путей решения этой задачи является использование для космических
Высокая скорость истечения реактивной струи (15 – 70 км/с), характерная для
Высокая скорость истечения реактивной струи (15 – 70 км/с), характерная для
Длительные и энергетически напряженные межорбитальные перелеты КА с ЭРД требуют использования
Длительные и энергетически напряженные межорбитальные перелеты КА с ЭРД требуют использования
Принципиальное отличие электрореактивных двигателей от термохимических заключается в том, что тяга
Принципиальное отличие электрореактивных двигателей от термохимических заключается в том, что тяга
Отличительными особенностями ЭРД являются их малая тяга (0.01..0.1 Н) и способность к
Отличительными особенностями ЭРД являются их малая тяга (0.01..0.1 Н) и способность к
Двумя основными компонентами электрореактивной двигательной установки (ЭРДУ) являются энергетическая установка и
Двумя основными компонентами электрореактивной двигательной установки (ЭРДУ) являются энергетическая установка и
Выдающиеся ученые, внесшие вклад в разработку конструкций и способов применения ЭРДУ
Выдающиеся ученые, внесшие вклад в разработку конструкций и способов применения ЭРДУ
В настоящее время в ЭРДУ используются различные принципы ускорения рабочего тела.
В настоящее время в ЭРДУ используются различные принципы ускорения рабочего тела.
Электрореактивные двигатели делятся на три основных класса.
1) электротермические ‑ энергия используется
Электрореактивные двигатели делятся на три основных класса.
1) электротермические ‑ энергия используется
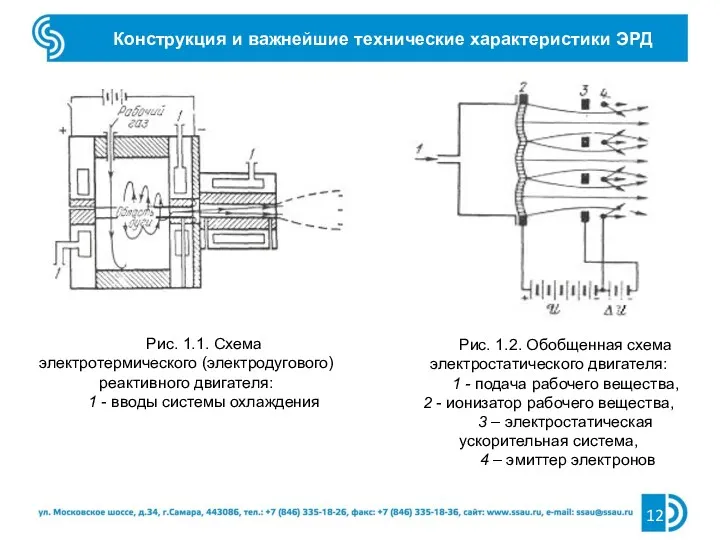
Рис. 1.1. Схема электротермического (электродугового) реактивного двигателя:
1 - вводы системы охлаждения
Рис. 1.2.
Рис. 1.1. Схема электротермического (электродугового) реактивного двигателя:
1 - вводы системы охлаждения
Рис. 1.2.
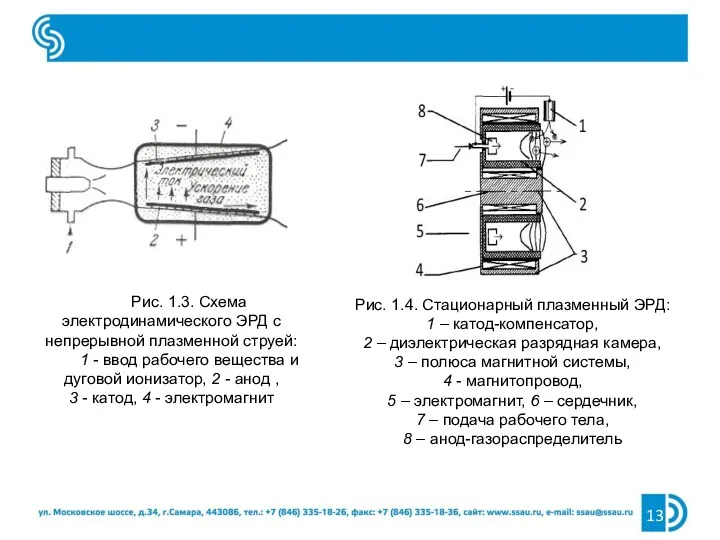
Рис. 1.3. Схема электродинамического ЭРД с непрерывной плазменной струей:
1 - ввод рабочего вещества
Рис. 1.3. Схема электродинамического ЭРД с непрерывной плазменной струей:
1 - ввод рабочего вещества
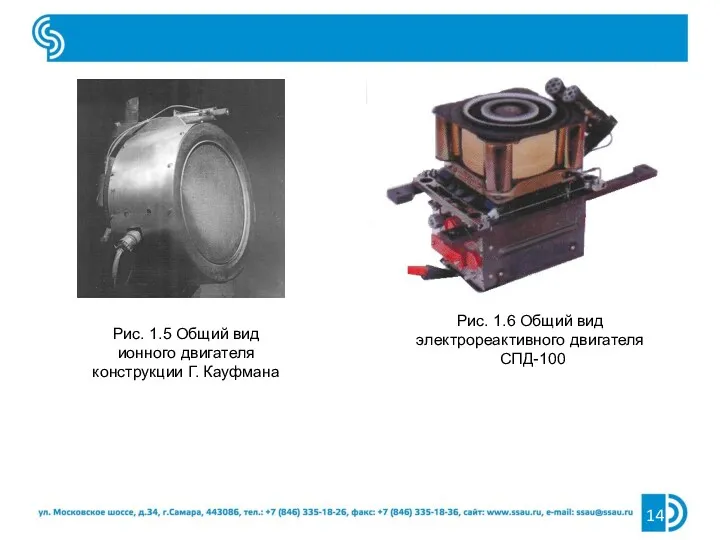
Рис. 1.5 Общий вид
ионного двигателя
конструкции Г. Кауфмана
Рис. 1.6 Общий
Рис. 1.5 Общий вид
ионного двигателя
конструкции Г. Кауфмана
Рис. 1.6 Общий
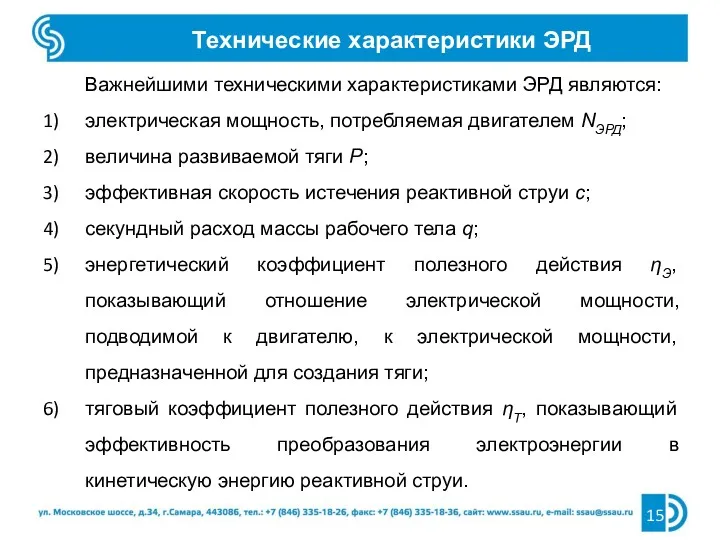
Важнейшими техническими характеристиками ЭРД являются:
электрическая мощность, потребляемая двигателем NЭРД;
величина развиваемой
Важнейшими техническими характеристиками ЭРД являются:
электрическая мощность, потребляемая двигателем NЭРД;
величина развиваемой
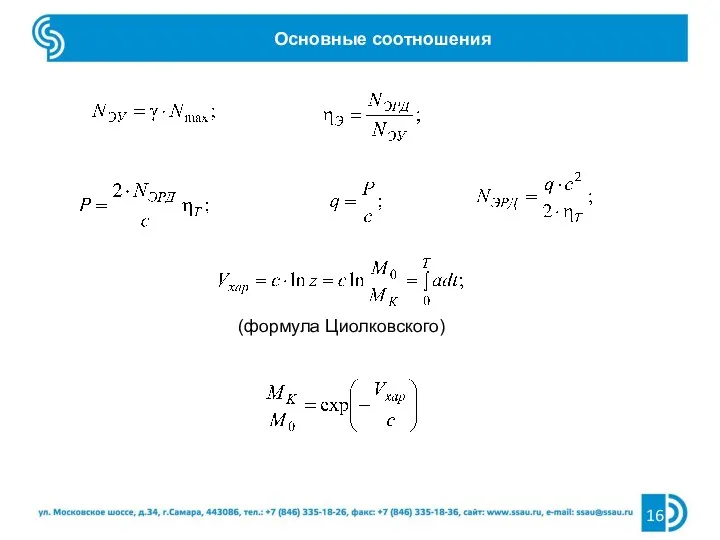
Основные соотношения
(формула Циолковского)
Основные соотношения
(формула Циолковского)
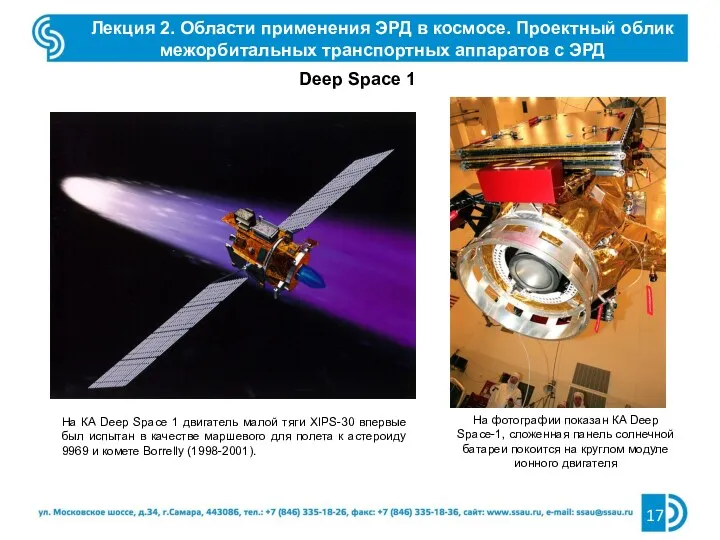
Лекция 2. Области применения ЭРД в космосе. Проектный облик межорбитальных транспортных
Лекция 2. Области применения ЭРД в космосе. Проектный облик межорбитальных транспортных
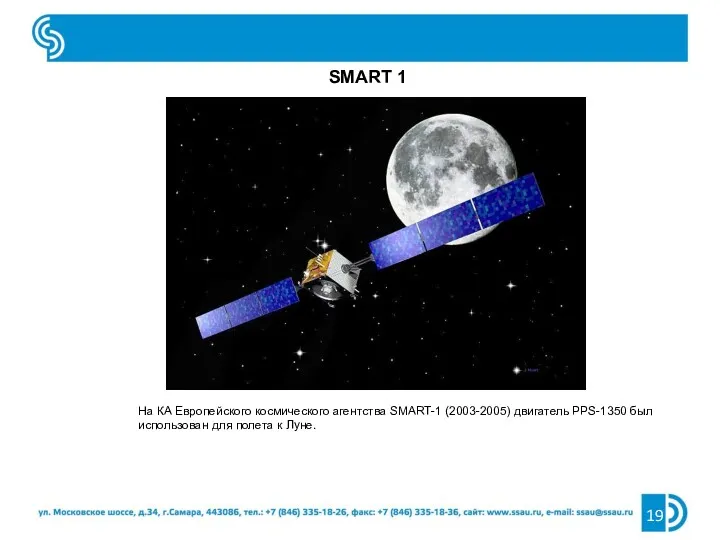
SMART 1
На КА Европейского космического агентства SMART-1 (2003-2005) двигатель PPS-1350 был
SMART 1
На КА Европейского космического агентства SMART-1 (2003-2005) двигатель PPS-1350 был
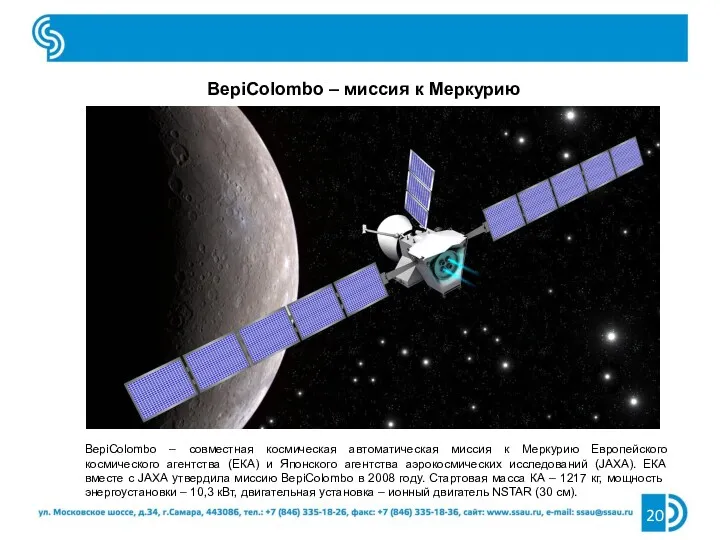
BepiColombo – миссия к Меркурию
BepiColombo – совместная космическая автоматическая миссия к
BepiColombo – миссия к Меркурию
BepiColombo – совместная космическая автоматическая миссия к

Проект универсальной космической ступени с ЭРДУ - SEPS
Рис. 1.7 – Универсальная
Проект универсальной космической ступени с ЭРДУ - SEPS
Рис. 1.7 – Универсальная
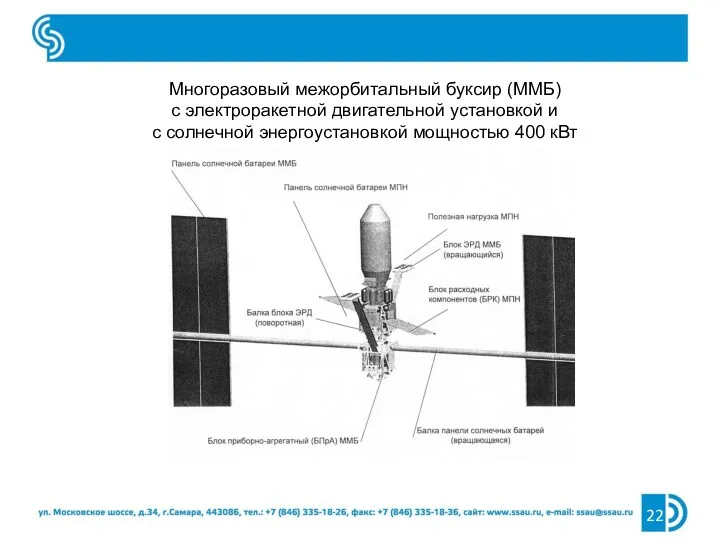
Многоразовый межорбитальный буксир (ММБ)
с электроракетной двигательной установкой и
с солнечной
Многоразовый межорбитальный буксир (ММБ)
с электроракетной двигательной установкой и
с солнечной
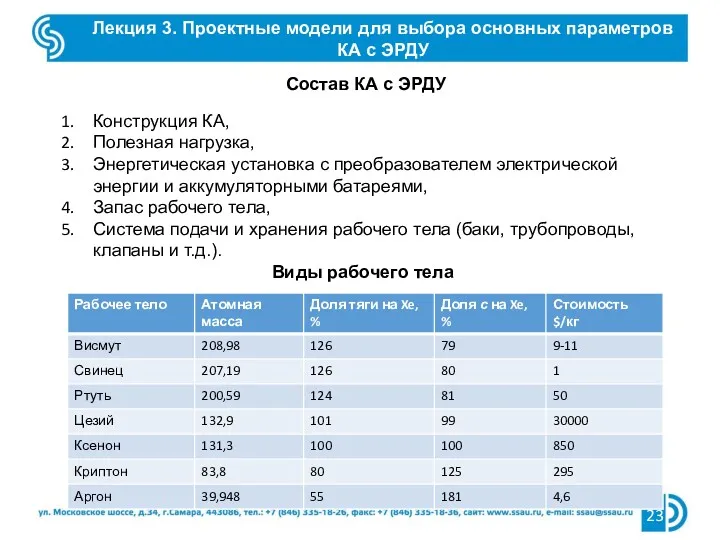
Лекция 3. Проектные модели для выбора основных параметров КА с ЭРДУ
Состав
Лекция 3. Проектные модели для выбора основных параметров КА с ЭРДУ
Состав
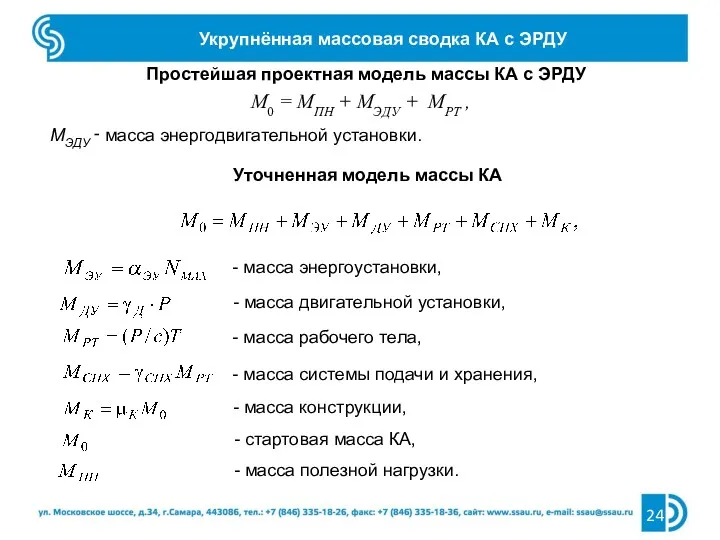
Укрупнённая массовая сводка КА с ЭРДУ
M0 = МПН + МЭДУ + МРТ ,
МЭДУ ‑ масса энергодвигательной установки.
-
Укрупнённая массовая сводка КА с ЭРДУ
M0 = МПН + МЭДУ + МРТ ,
МЭДУ ‑ масса энергодвигательной установки.
-
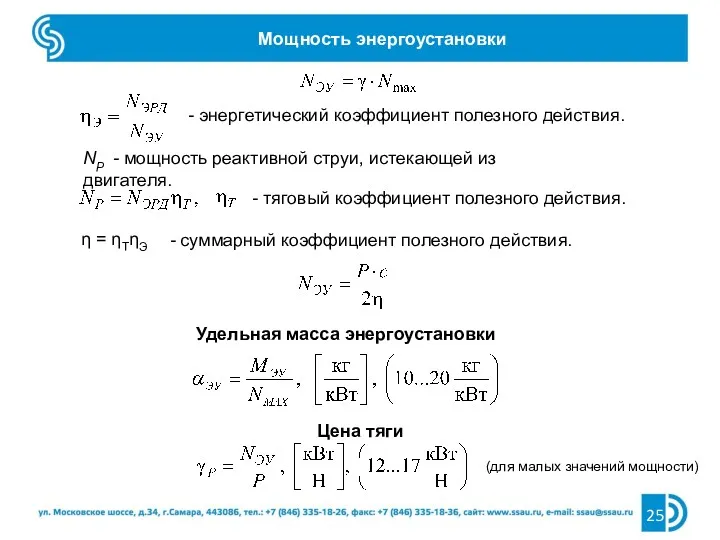
Мощность энергоустановки
- энергетический коэффициент полезного действия.
NР - мощность реактивной струи, истекающей
Мощность энергоустановки
- энергетический коэффициент полезного действия.
NР - мощность реактивной струи, истекающей
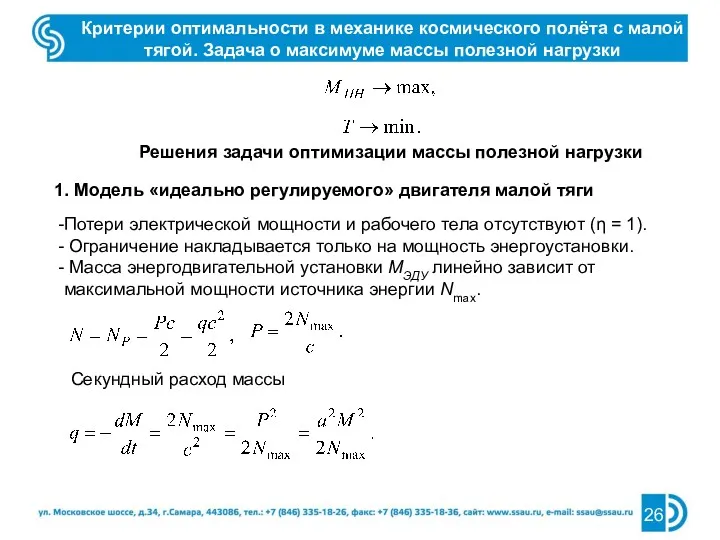
Критерии оптимальности в механике космического полёта с малой тягой. Задача о
Критерии оптимальности в механике космического полёта с малой тягой. Задача о
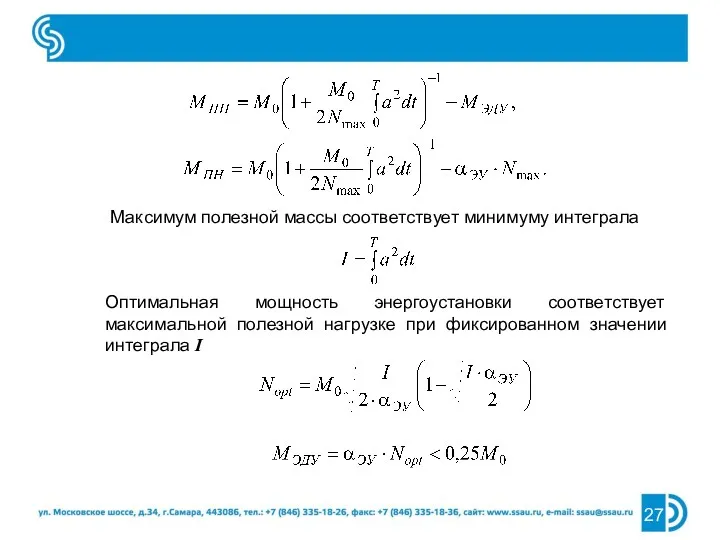
Максимум полезной массы соответствует минимуму интеграла
Оптимальная мощность энергоустановки соответствует максимальной полезной
Максимум полезной массы соответствует минимуму интеграла
Оптимальная мощность энергоустановки соответствует максимальной полезной
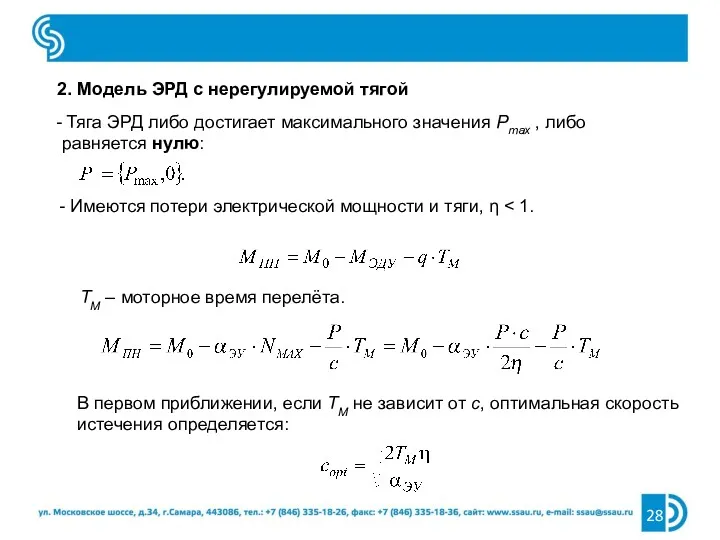
2. Модель ЭРД с нерегулируемой тягой
Тяга ЭРД либо достигает
2. Модель ЭРД с нерегулируемой тягой
Тяга ЭРД либо достигает
1. Разворот корпуса КА вместе с жестко закрепленным блоком ЭРД.
Способы реализации:
а)
1. Разворот корпуса КА вместе с жестко закрепленным блоком ЭРД.
Способы реализации:
а)
3. Разворот блока ЭРД независимо от ориентации корпуса КА.
Способы реализации:
установка специальной
3. Разворот блока ЭРД независимо от ориентации корпуса КА.
Способы реализации:
установка специальной
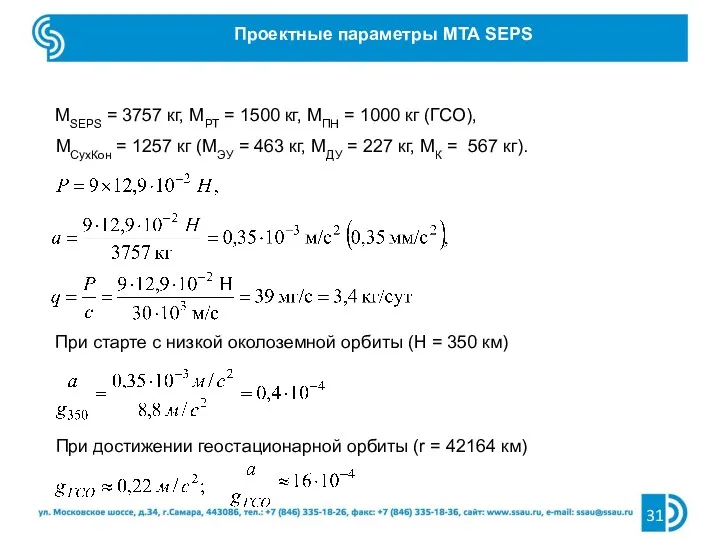
MSEPS = 3757 кг, МРТ = 1500 кг, МПН = 1000
MSEPS = 3757 кг, МРТ = 1500 кг, МПН = 1000
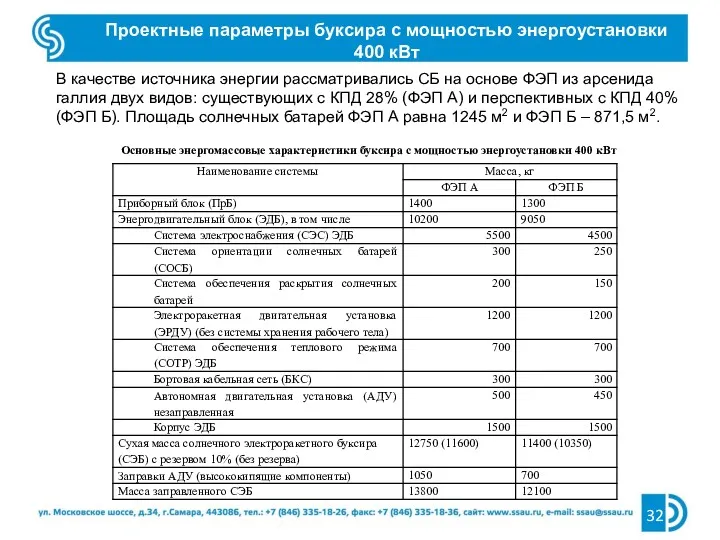
Проектные параметры буксира с мощностью энергоустановки 400 кВт
В качестве источника энергии
Проектные параметры буксира с мощностью энергоустановки 400 кВт
В качестве источника энергии
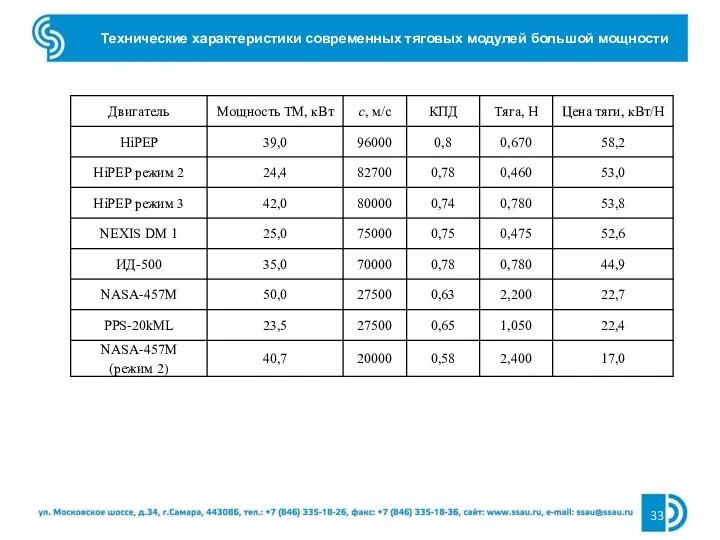
Технические характеристики современных тяговых модулей большой мощности
Технические характеристики современных тяговых модулей большой мощности
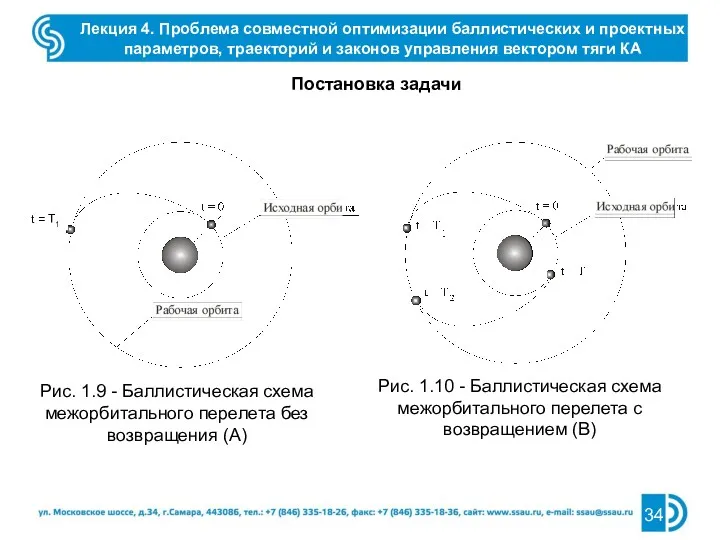
Рис. 1.9 - Баллистическая схема межорбитального перелета без возвращения (A)
Рис. 1.10
Рис. 1.9 - Баллистическая схема межорбитального перелета без возвращения (A)
Рис. 1.10
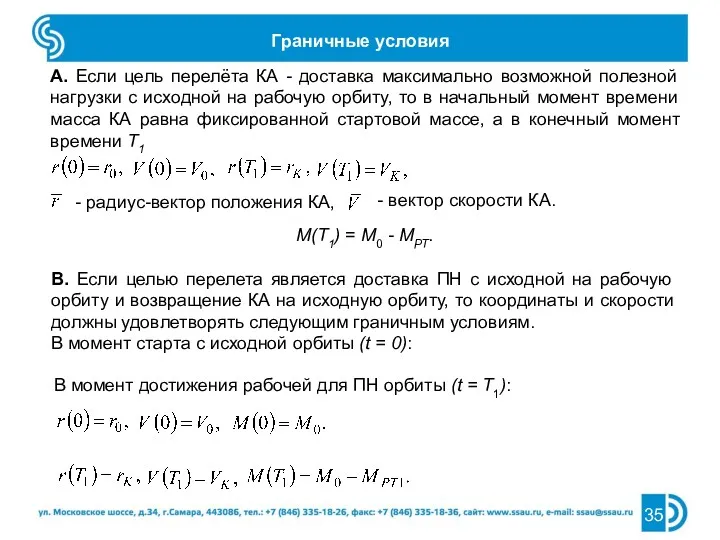
A. Если цель перелёта КА - доставка максимально возможной полезной нагрузки
A. Если цель перелёта КА - доставка максимально возможной полезной нагрузки
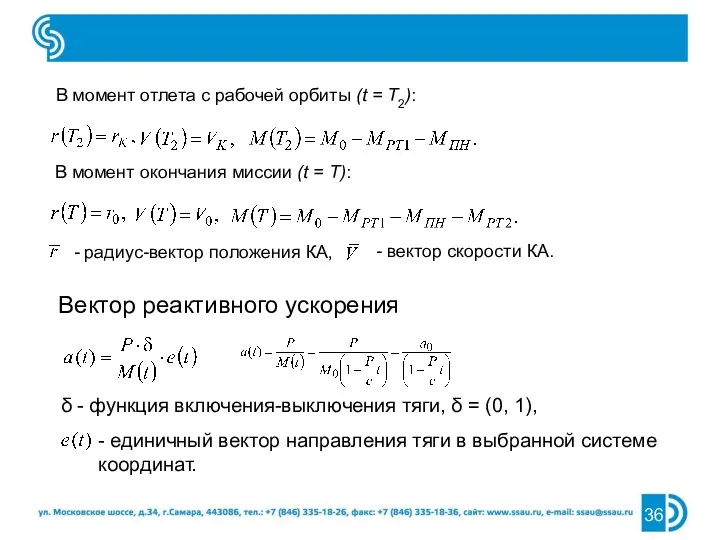
В момент отлета с рабочей орбиты (t = T2):
В момент окончания миссии (t = T):
-
В момент отлета с рабочей орбиты (t = T2):
В момент окончания миссии (t = T):
-
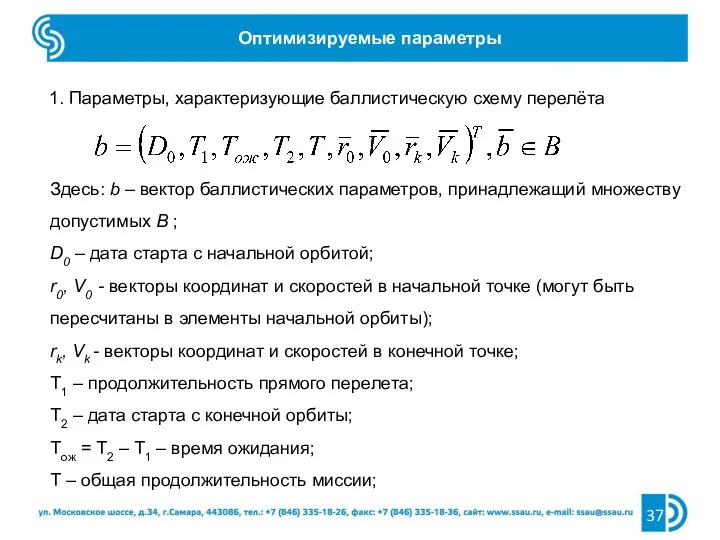
Оптимизируемые параметры
1. Параметры, характеризующие баллистическую схему перелёта
Здесь: b – вектор баллистических
Оптимизируемые параметры
1. Параметры, характеризующие баллистическую схему перелёта
Здесь: b – вектор баллистических
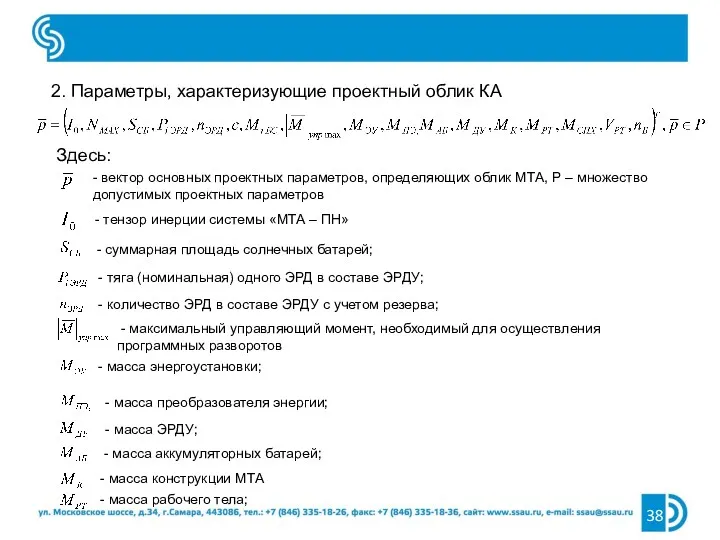
2. Параметры, характеризующие проектный облик КА
Здесь:
- вектор основных проектных параметров, определяющих
2. Параметры, характеризующие проектный облик КА
Здесь:
- вектор основных проектных параметров, определяющих
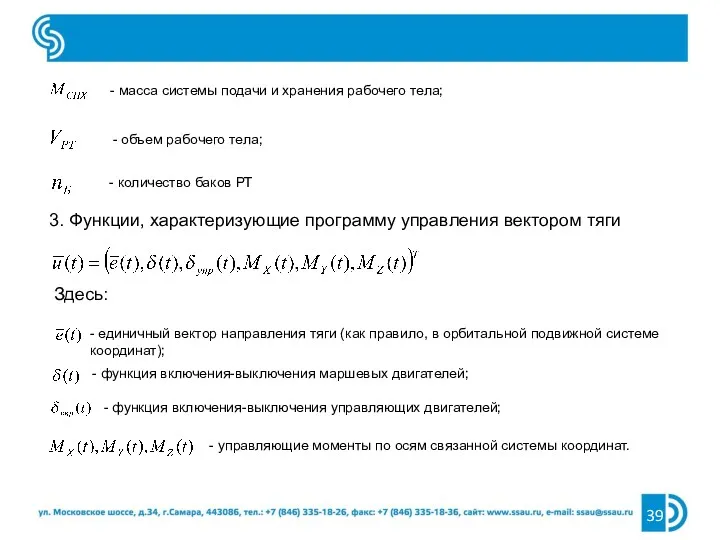
- масса системы подачи и хранения рабочего тела;
- объем рабочего тела;
-
- масса системы подачи и хранения рабочего тела;
- объем рабочего тела;
-
Будем использовать обозначения:
– вектор ускорения от тяги, на его величину и
Будем использовать обозначения:
– вектор ускорения от тяги, на его величину и
Разделение общей задачи оптимизации
Задача проектно-баллистической оптимизации условно разделяется на три части:
Разделение общей задачи оптимизации
Задача проектно-баллистической оптимизации условно разделяется на три части:
Параметрическая задача – это задача выбора оптимальных проектных параметров КА, обеспечивающих
Параметрическая задача – это задача выбора оптимальных проектных параметров КА, обеспечивающих
Задачи проектной и баллистической оптимизации могут решаться с использованием моделей различной
Задачи проектной и баллистической оптимизации могут решаться с использованием моделей различной
Примеры
1. Модель «идеально регулируемого» двигателя малой тяги
- динамическая характеристика перелета
- общий
Примеры
1. Модель «идеально регулируемого» двигателя малой тяги
- динамическая характеристика перелета
- общий
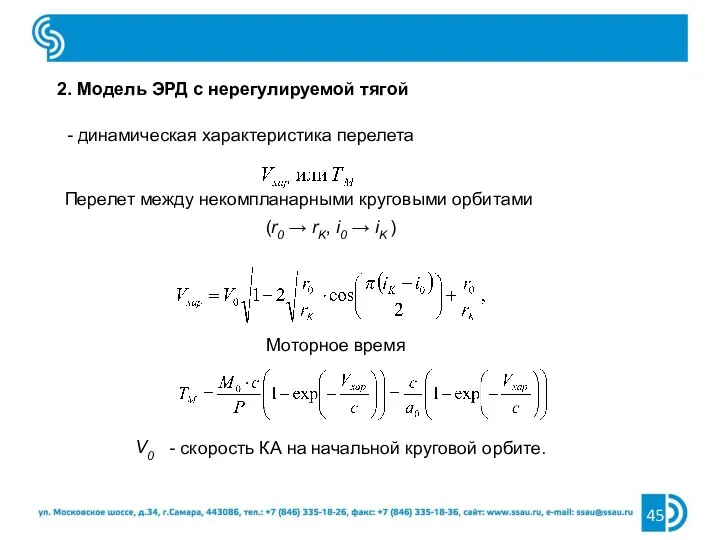
2. Модель ЭРД с нерегулируемой тягой
- динамическая характеристика перелета
Перелет между
2. Модель ЭРД с нерегулируемой тягой
- динамическая характеристика перелета
Перелет между
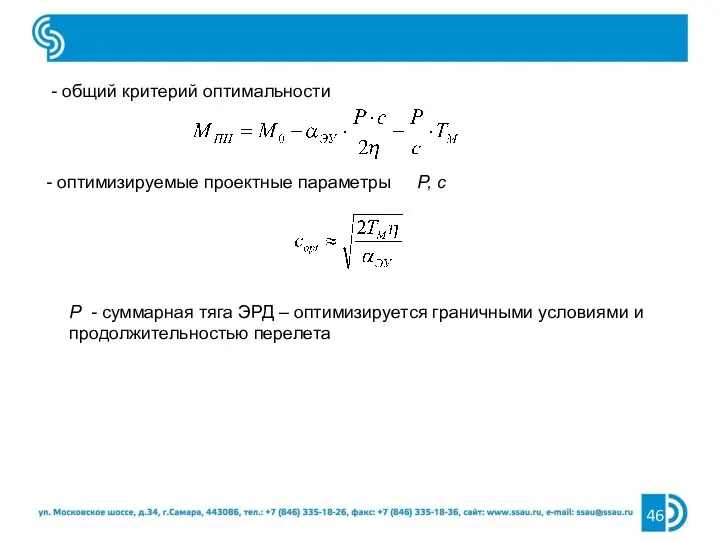
- общий критерий оптимальности
- оптимизируемые проектные параметры
P, c
P - суммарная тяга
- общий критерий оптимальности
- оптимизируемые проектные параметры
P, c
P - суммарная тяга
1. Общей задачей совместной оптимизации будем называть задачу отыскания проектных параметров
1. Общей задачей совместной оптимизации будем называть задачу отыскания проектных параметров
2. Вектор параметров ∈ P будем называть универсальным для диапазона динамических
2. Вектор параметров ∈ P будем называть универсальным для диапазона динамических
 Распорный анкерный болт
Распорный анкерный болт Разработка технологии очистки сточных вод с использованием микроводорослей
Разработка технологии очистки сточных вод с использованием микроводорослей Неофункционализм 1950-х гг
Неофункционализм 1950-х гг Органы государственной власти субъектов Российской Федерации. Конституционное право России
Органы государственной власти субъектов Российской Федерации. Конституционное право России Есеп беру. Алматытелекомнын атқаратын қызметі. Транспорттық желінің сипаттамасы
Есеп беру. Алматытелекомнын атқаратын қызметі. Транспорттық желінің сипаттамасы Сторожевая и станичная служба по реке Северский Донец
Сторожевая и станичная служба по реке Северский Донец Автоматизированные Информационные Системы для государственных, муниципальных заказчиков и бизнеса
Автоматизированные Информационные Системы для государственных, муниципальных заказчиков и бизнеса Подготовка к написанию сочинения. Определение проблемы исходного текста
Подготовка к написанию сочинения. Определение проблемы исходного текста Diplom1
Diplom1 Мероприятия по энергосбережению в ограждающих конструкциях зданий
Мероприятия по энергосбережению в ограждающих конструкциях зданий Анализ конъюнктуры рынка угля
Анализ конъюнктуры рынка угля Компьютерные вирусы и антивирусные программы
Компьютерные вирусы и антивирусные программы Выполнение работ по одной или нескольким профессиям рабочих, должностям служащих. Отчет по производственной практике
Выполнение работ по одной или нескольким профессиям рабочих, должностям служащих. Отчет по производственной практике Межвидовые отношения организмов в экосистеме. 9 класс
Межвидовые отношения организмов в экосистеме. 9 класс Маркетинговые исследования в сети аптек
Маркетинговые исследования в сети аптек Центр речевой активности в группе ДОУ
Центр речевой активности в группе ДОУ Резистор (ағыл. resіstor, лат. resіsto - қарсыласамын) - электр тізбегінің әртүрлі тармақтарындағы ток күшін, не кернеуді
Резистор (ағыл. resіstor, лат. resіsto - қарсыласамын) - электр тізбегінің әртүрлі тармақтарындағы ток күшін, не кернеуді Факторы эволюции. Приспособленности
Факторы эволюции. Приспособленности Умножение и деление. Устный счет. 3 класс
Умножение и деление. Устный счет. 3 класс Основные задачи при физическом воспитании
Основные задачи при физическом воспитании Сфера маркетинга социальных услуг
Сфера маркетинга социальных услуг Автоматизация звука Щ в словах, словосочетаниях.
Автоматизация звука Щ в словах, словосочетаниях. Презентация кандидата на позицию
Презентация кандидата на позицию Обеспечение предприятий автосервиса материально-техническими ресурсами. Материальные ресурсы. (Тема 9.15)
Обеспечение предприятий автосервиса материально-техническими ресурсами. Материальные ресурсы. (Тема 9.15) Организация внимания
Организация внимания Формирование количественных представлений, представлений о составе числа, числовой прямой у детей с речевыми нарушениями посредством использования дидактических игр в образовательной области Познание.
Формирование количественных представлений, представлений о составе числа, числовой прямой у детей с речевыми нарушениями посредством использования дидактических игр в образовательной области Познание. ПРЕЗЕНТАЦИЯ д/о ТРАКТОРИСТ
ПРЕЗЕНТАЦИЯ д/о ТРАКТОРИСТ Циклоалканы
Циклоалканы