- Основы устройства малых космических аппаратов

Содержание
- 2. План презентации Цели и задачи дисциплины Структура дисциплины Связь с другими дисциплинами специальности Земля в Солнечной
- 3. Конструктивное исполнение МКА 3 Типовой состав бортового оборудования микроспутника: Корпус Компьютер Система ориентации и стабилизации Система
- 4. Конструктивное исполнение МКА 3 Антенна Корпус Солнечная батарея Система питания Компьютер Передатчик Система ориентации Полезная нагрузка
- 5. Корпус 4 Корпус формата 1U от ISIS Корпус формата 6U от ISIS Корпус формата 8U от
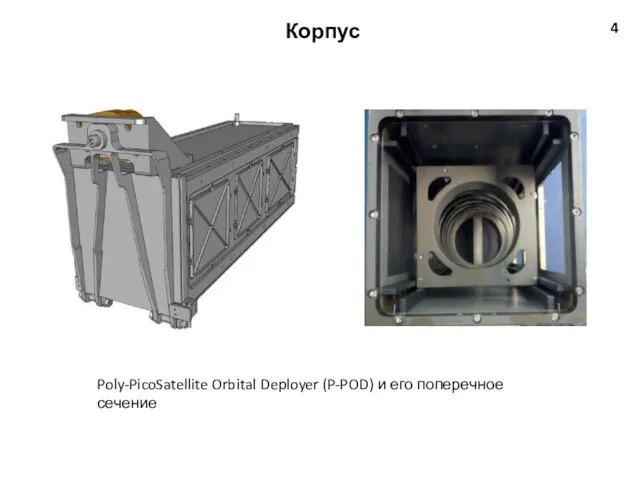
- 6. Корпус 4 Poly-PicoSatellite Orbital Deployer (P-POD) и его поперечное сечение
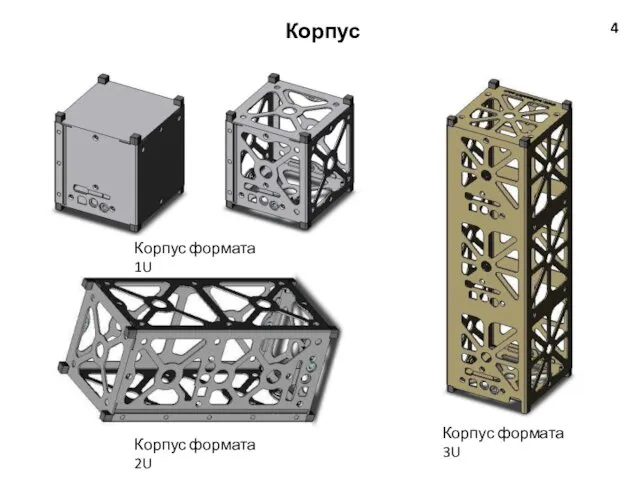
- 7. Корпус 4 Корпус формата 1U Корпус формата 2U Корпус формата 3U
- 8. Компьютер 4 Компьютер CudeSpace на базе Cortex M3 Компьютер ISIS на базе ARM9
- 9. Система ориентации и стабилизации 4 Ориентация – управление угловым движением микроспутника на участке свободного полета, другими
- 10. Системы ориентации 5 Системы ориентации Пассивные Не требуют затрат энергии. Гравитационные, инерционные, аэродинамические. Ограниченная область применения.
- 11. Системы ориентации 6 Датчики системы ориентации Электронно-оптические датчики. Опорный ориентир – небесное светило (Солнце, Земля, Луна).
- 12. Системы ориентации 7 Гравитационная система ориентации – пассивная система ориентации, основанное на использовании гравитационного момента, который
- 13. Системы ориентации 8 Электромагнитная система ориентации может быть либо пассивной, либо активной. Если на микроспутнике установить
- 14. Системы ориентации 9 В основе систем ориентации с помощью инерционных маховиков лежит свойство сохранения кинетического момента
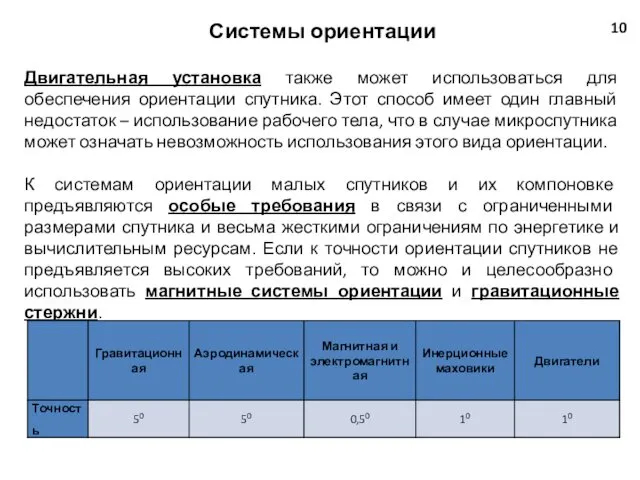
- 15. Системы ориентации 10 Двигательная установка также может использоваться для обеспечения ориентации спутника. Этот способ имеет один
- 16. Система питания 11 Структура солнечных батарей Солнечные батареи Теоретически с одного квадратного метра солнечных батарей можно
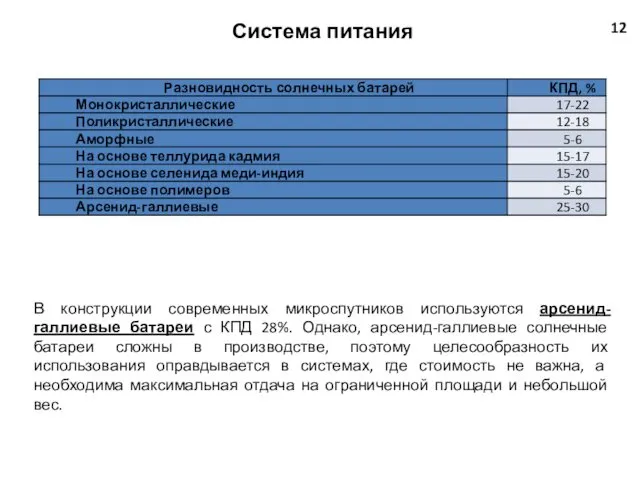
- 17. Система питания 12 В конструкции современных микроспутников используются арсенид-галлиевые батареи с КПД 28%. Однако, арсенид-галлиевые солнечные
- 18. Система питания 13 Аккумуляторные батареи
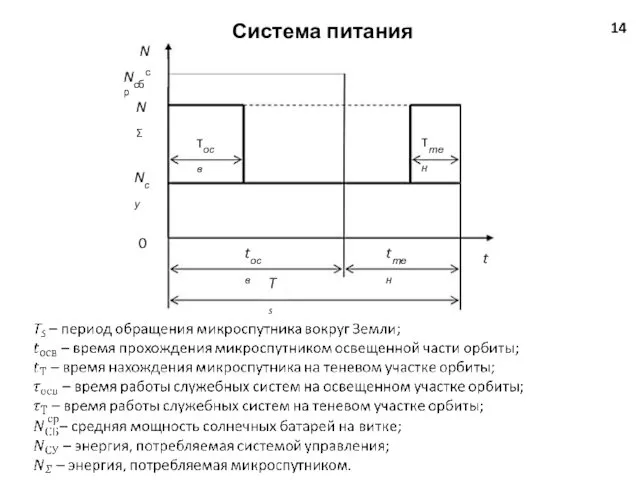
- 19. Система питания 14 Ts tосв tтен τосв τтен Nсу NΣ Nсбср N 0 t
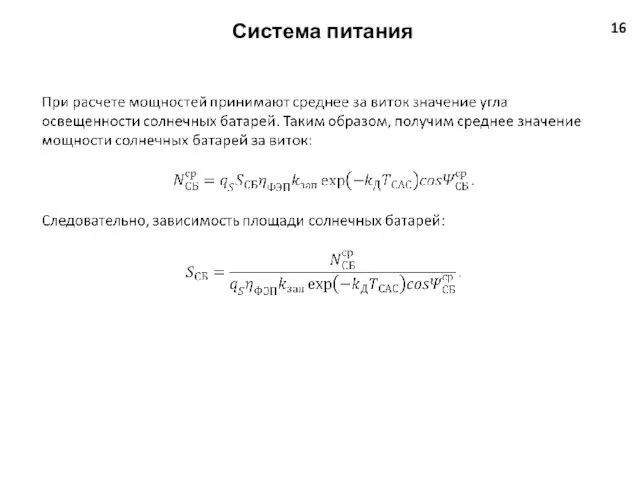
- 20. Система питания 15
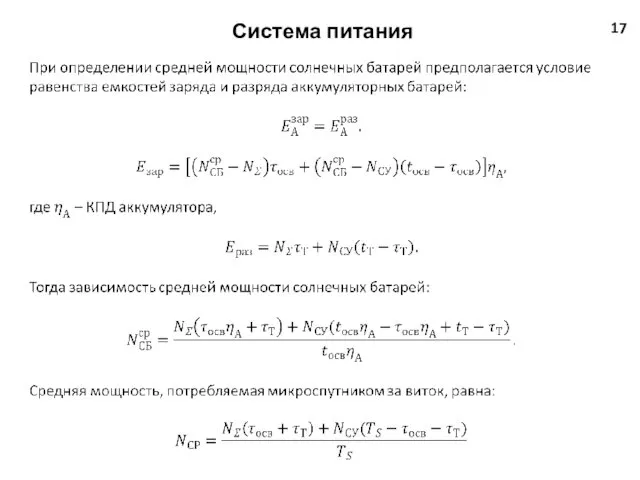
- 21. Система питания 16
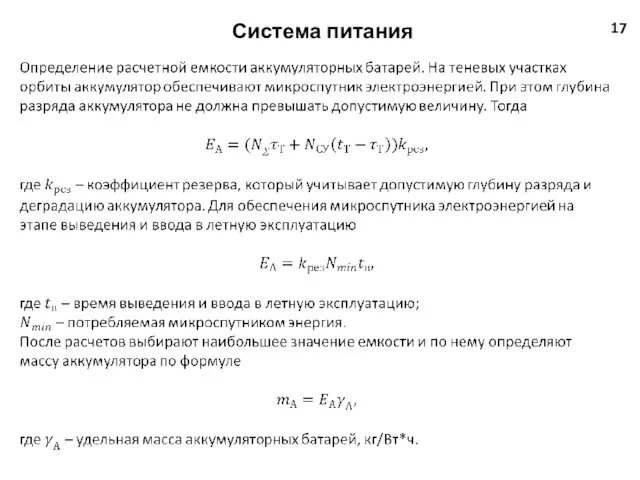
- 22. Система питания 17
- 23. Система питания 17
- 24. Система связи 17 Штыревая антенна Рабочая частота: до 500 МГц Масса: 150 г Скорость передачи данных:
- 25. Система связи 17 Антенна S-диапазона Рабочая частота: 2-2,5 ГГц Масса: 150 г Скорость передачи данных: до
- 26. Система связи 17 Антенна X-диапазона Рабочая частота: 8-8,5 ГГц Масса: 200 г Скорость передачи данных: до
- 27. Система утилизации 17 Солнечный парус
- 28. Система утилизации 17 Аэродинамический тормоз
- 30. Скачать презентацию
План презентации
Цели и задачи дисциплины
Структура дисциплины
Связь с другими дисциплинами специальности
Земля в
План презентации
Цели и задачи дисциплины
Структура дисциплины
Связь с другими дисциплинами специальности
Земля в
Конструктивное исполнение МКА
3
Типовой состав бортового оборудования микроспутника:
Корпус
Компьютер
Система ориентации и стабилизации
Система питания
Радиоприемник/передатчик
Датчики/устройства
Конструктивное исполнение МКА
3
Типовой состав бортового оборудования микроспутника:
Корпус
Компьютер
Система ориентации и стабилизации
Система питания
Радиоприемник/передатчик
Датчики/устройства

Конструктивное исполнение МКА
3
Антенна
Корпус
Солнечная батарея
Система питания
Компьютер
Передатчик
Система ориентации
Полезная нагрузка
Конструктивное исполнение МКА
3
Антенна
Корпус
Солнечная батарея
Система питания
Компьютер
Передатчик
Система ориентации
Полезная нагрузка

Корпус
4
Корпус формата 1U от ISIS
Корпус формата 6U от ISIS
Корпус формата 8U
Корпус
4
Корпус формата 1U от ISIS
Корпус формата 6U от ISIS
Корпус формата 8U
Корпус
4
Poly-PicoSatellite Orbital Deployer (P-POD) и его поперечное сечение
Корпус
4
Poly-PicoSatellite Orbital Deployer (P-POD) и его поперечное сечение
Корпус
4
Корпус формата 1U
Корпус формата 2U
Корпус формата 3U
Корпус
4
Корпус формата 1U
Корпус формата 2U
Корпус формата 3U
Компьютер
4
Компьютер CudeSpace на базе Cortex M3
Компьютер ISIS на базе ARM9
Компьютер
4
Компьютер CudeSpace на базе Cortex M3
Компьютер ISIS на базе ARM9
Система ориентации и стабилизации
4
Ориентация – управление угловым движением микроспутника на участке
Система ориентации и стабилизации
4
Ориентация – управление угловым движением микроспутника на участке

Системы ориентации
5
Системы ориентации
Пассивные
Не требуют затрат энергии. Гравитационные, инерционные, аэродинамические. Ограниченная область
Системы ориентации
5
Системы ориентации
Пассивные
Не требуют затрат энергии. Гравитационные, инерционные, аэродинамические. Ограниченная область
Системы ориентации
6
Датчики системы ориентации
Электронно-оптические датчики. Опорный ориентир – небесное светило (Солнце,
Системы ориентации
6
Датчики системы ориентации
Электронно-оптические датчики. Опорный ориентир – небесное светило (Солнце,

Системы ориентации
7
Гравитационная система ориентации – пассивная система ориентации, основанное на использовании
Системы ориентации
7
Гравитационная система ориентации – пассивная система ориентации, основанное на использовании
Системы ориентации
8
Электромагнитная система ориентации может быть либо пассивной, либо активной. Если
Системы ориентации
8
Электромагнитная система ориентации может быть либо пассивной, либо активной. Если

Системы ориентации
9
В основе систем ориентации с помощью инерционных маховиков лежит свойство
Системы ориентации
9
В основе систем ориентации с помощью инерционных маховиков лежит свойство
Системы ориентации
10
Двигательная установка также может использоваться для обеспечения ориентации спутника. Этот
Системы ориентации
10
Двигательная установка также может использоваться для обеспечения ориентации спутника. Этот

Система питания
11
Структура солнечных батарей
Солнечные батареи
Теоретически с одного квадратного метра солнечных батарей
Система питания
11
Структура солнечных батарей
Солнечные батареи
Теоретически с одного квадратного метра солнечных батарей
Система питания
12
В конструкции современных микроспутников используются арсенид-галлиевые батареи с КПД 28%.
Система питания
12
В конструкции современных микроспутников используются арсенид-галлиевые батареи с КПД 28%.

Система питания
13
Аккумуляторные батареи
Система питания
13
Аккумуляторные батареи
Система питания
14
Ts
tосв
tтен
τосв
τтен
Nсу
NΣ
Nсбср
N
0
t
Система питания
14
Ts
tосв
tтен
τосв
τтен
Nсу
NΣ
Nсбср
N
0
t
Система питания
15
Система питания
15
Система питания
16
Система питания
16
Система питания
17
Система питания
17
Система питания
17
Система питания
17
Система связи
17
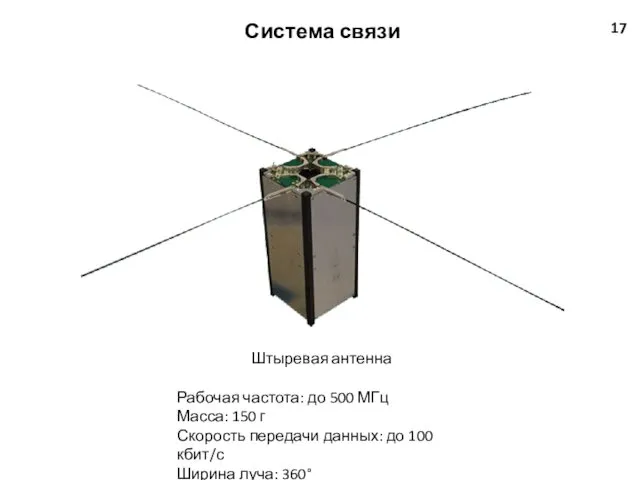
Штыревая антенна
Рабочая частота: до 500 МГц
Масса: 150 г
Скорость передачи данных:
Система связи
17
Штыревая антенна
Рабочая частота: до 500 МГц
Масса: 150 г
Скорость передачи данных:

Система связи
17
Антенна S-диапазона
Рабочая частота: 2-2,5 ГГц
Масса: 150 г
Скорость передачи данных: до
Система связи
17
Антенна S-диапазона
Рабочая частота: 2-2,5 ГГц
Масса: 150 г
Скорость передачи данных: до

Система связи
17
Антенна X-диапазона
Рабочая частота: 8-8,5 ГГц
Масса: 200 г
Скорость передачи данных: до
Система связи
17
Антенна X-диапазона
Рабочая частота: 8-8,5 ГГц
Масса: 200 г
Скорость передачи данных: до

Система утилизации
17
Солнечный парус
Система утилизации
17
Солнечный парус
Система утилизации
17
Аэродинамический тормоз
Система утилизации
17
Аэродинамический тормоз
 Техническая акустика и защита от шума. Лекция №5
Техническая акустика и защита от шума. Лекция №5 Технологии индустриального производства
Технологии индустриального производства Гражданское общество и правовое государство
Гражданское общество и правовое государство LCD или жидкокристаллический дисплей
LCD или жидкокристаллический дисплей Выставка поделок ко Дню Победы
Выставка поделок ко Дню Победы Реальная математика. Практические расчеты по формулам
Реальная математика. Практические расчеты по формулам Формирование коммуникативных способностей у старших дошкольников
Формирование коммуникативных способностей у старших дошкольников Электрические машины
Электрические машины Потребности в перемещении людей и товаров,
Потребности в перемещении людей и товаров, Генеральный план. Бакунинская ул.,д. 60, стр 4, 60/1, ЦАО Бесманный
Генеральный план. Бакунинская ул.,д. 60, стр 4, 60/1, ЦАО Бесманный Әсіпорынның архитектуралық құрылыс
Әсіпорынның архитектуралық құрылыс Дети и митинги
Дети и митинги Призентация программы Доброморье
Призентация программы Доброморье Katolicka nauka społeczna
Katolicka nauka społeczna Концепция глубокоэшелонированной защиты
Концепция глубокоэшелонированной защиты Базовые теории воспитания и развития личностин
Базовые теории воспитания и развития личностин Уроки настоящего Сириус в школе
Уроки настоящего Сириус в школе Событие как формат оценки успешности освоения и применения учащимися Универсальных Учебных Действий
Событие как формат оценки успешности освоения и применения учащимися Универсальных Учебных Действий Практическая работа по теме Вашингтон
Практическая работа по теме Вашингтон Ремонт (1 этаж)
Ремонт (1 этаж) Известные личности зарубежной литературы
Известные личности зарубежной литературы Путешествие на Чёрное и Азовское море
Путешествие на Чёрное и Азовское море Печатные формы глубокой печати
Печатные формы глубокой печати Comme Des Garcons. История создания и имидж бренда
Comme Des Garcons. История создания и имидж бренда Стекло. История стекла. Свойства стекла
Стекло. История стекла. Свойства стекла презентация Изготовление шипа с полупотёмком
презентация Изготовление шипа с полупотёмком Презентация к празднику посвященному Дню защитника Отечества Мой папа-самый, самый!
Презентация к празднику посвященному Дню защитника Отечества Мой папа-самый, самый! Регуляция клеточной активности. Роль регуляторных механизмов для жизнедеятельности клетки
Регуляция клеточной активности. Роль регуляторных механизмов для жизнедеятельности клетки