- Особенности условий автоматического регулирования и управления ЭПС

Содержание
- 2. где А и Ам – соответственно выполненный и минимальный расход энергии; Тпз и Тп – соответственно
- 3. Комбинированный принцип оптимизации. Он заключает в совмещении нескольких принципов, отмеченных ранее. Например, принцип постоянства скорости или
- 4. 5. На некотором уровне автоматизации возможно сокращение состава локомотивной бри-гады. При сопряженном автоматическом телеуправлении поездами возможно
- 5. и текущему значению регулируемой величины, для выявления ошибки или рассогласова-ния Δ=g – z; – управляющий элемент,
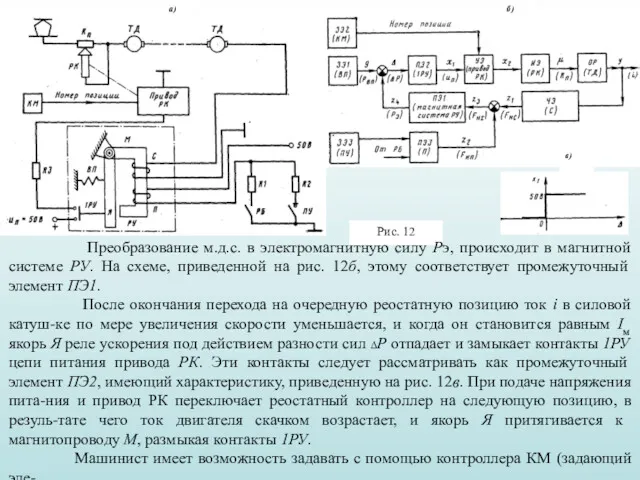
- 6. Преобразование м.д.с. в электромагнитную силу Рэ, происходит в магнитной системе РУ. На схеме, приведенной на рис.
- 7. мент ЗЭ2) позицию привода исполнительного элемента РК, на которой должен закончить-ся процесс пуска. Кроме того, машинист
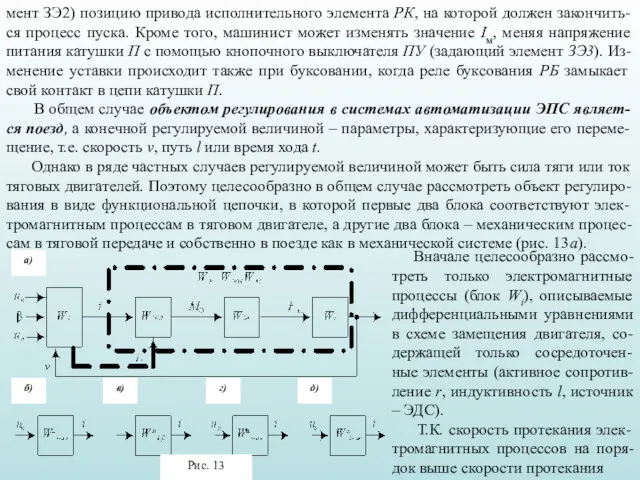
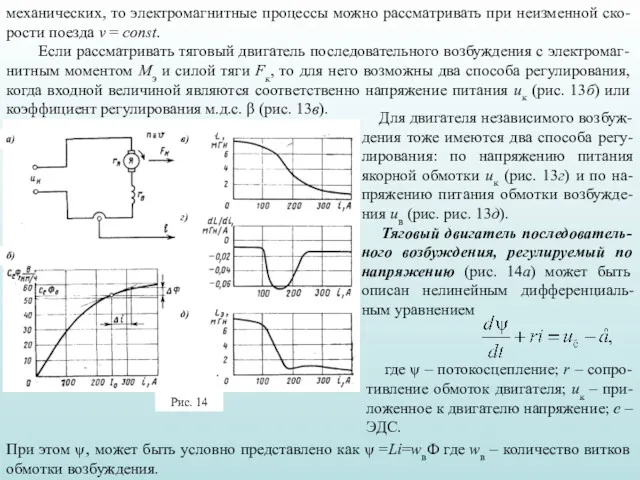
- 8. механических, то электромагнитные процессы можно рассматривать при неизменной ско-рости поезда v = const. Если рассматривать тяговый
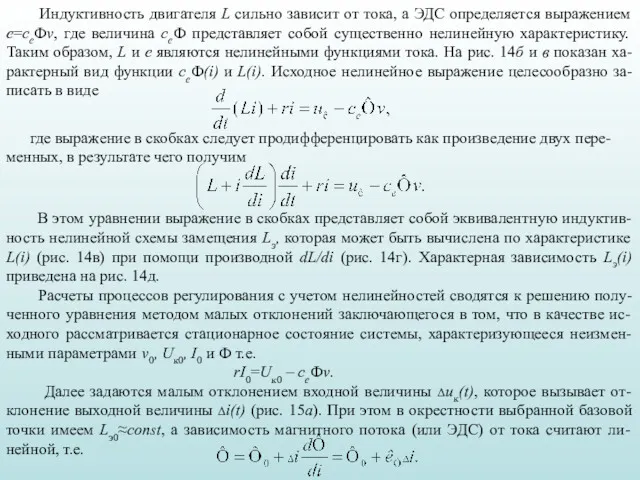
- 9. Индуктивность двигателя L сильно зависит от тока, а ЭДС определяется выражением е=сеФv, где величина сеФ представляет
- 10. поскольку то Вычитая из этого уравнения приведенное ранее уравнение стационарного режима для базовой точки и учитывая,
- 11. Двигатель последовательного возбуждения с регулированием м.д.с. (рис. 16а) опи-сывается уравнением в отклонениях где rэ=βrв+rя – эквивалентное
- 12. Подставляя выражения для rэ и Δiв в уравнение и пренебрегая величинами второго по-рядка малости типа ΔiΔβ
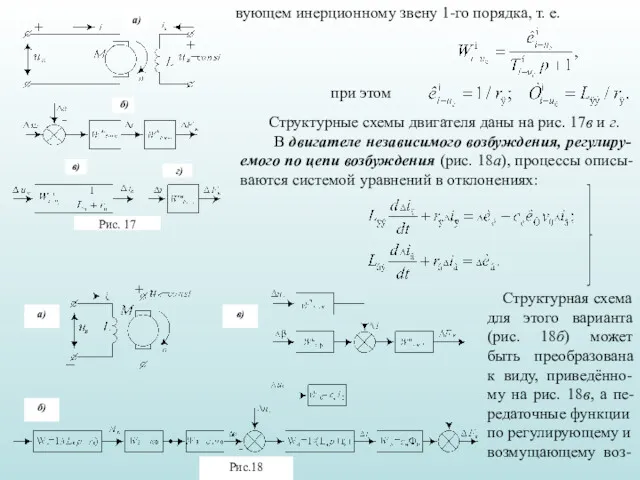
- 13. вующем инерционному звену 1-го порядка, т. е. при этом Структурные схемы двигателя даны на рис. 17в
- 14. действиям определяются выражениями: где При дальнейшем анализе структурной цепочки (см. рис. 6.2а) целесообразно объеди-нить элементы Wэм(р)
- 15. т.е. для выбранной базовой точки передаточная функция представ-ляет постоянный коэффициент (рис. 19). Для двигателя последовательного возбуждения
- 16. пряжение на обмотке возбуждения Δив (рис. 18а), преобразование ΔФ и Δi в ΔFк аналогично рассмотренному на
- 18. Скачать презентацию
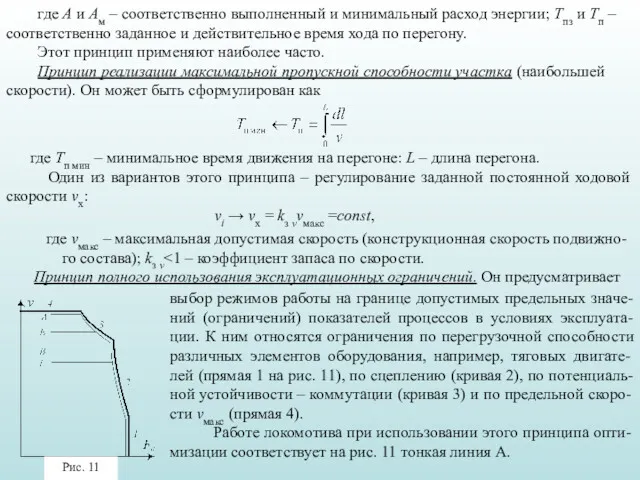
где А и Ам – соответственно выполненный и минимальный расход энергии;
где А и Ам – соответственно выполненный и минимальный расход энергии;
Комбинированный принцип оптимизации. Он заключает в совмещении нескольких принципов, отмеченных
Комбинированный принцип оптимизации. Он заключает в совмещении нескольких принципов, отмеченных
5. На некотором уровне автоматизации возможно сокращение состава локомотивной бри-гады. При сопряженном
5. На некотором уровне автоматизации возможно сокращение состава локомотивной бри-гады. При сопряженном
и текущему значению регулируемой величины, для выявления ошибки или рассогласова-ния Δ=g
и текущему значению регулируемой величины, для выявления ошибки или рассогласова-ния Δ=g
Преобразование м.д.с. в электромагнитную силу Рэ, происходит в магнитной системе
Преобразование м.д.с. в электромагнитную силу Рэ, происходит в магнитной системе
мент ЗЭ2) позицию привода исполнительного элемента РК, на которой должен закончить-ся
мент ЗЭ2) позицию привода исполнительного элемента РК, на которой должен закончить-ся
механических, то электромагнитные процессы можно рассматривать при неизменной ско-рости поезда v
механических, то электромагнитные процессы можно рассматривать при неизменной ско-рости поезда v
Индуктивность двигателя L сильно зависит от тока, а ЭДС определяется
Индуктивность двигателя L сильно зависит от тока, а ЭДС определяется
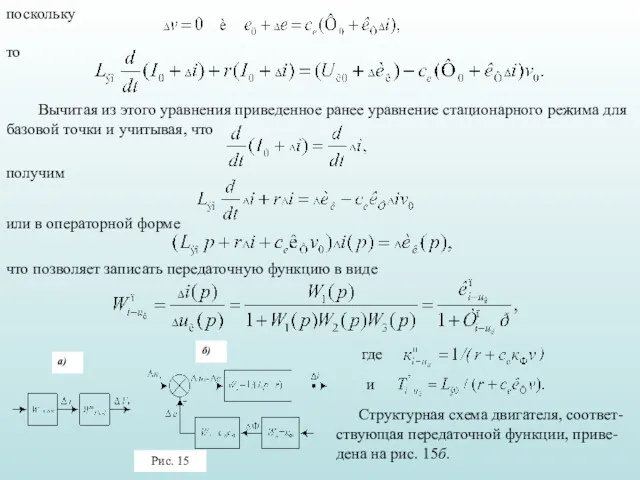
поскольку
то
Вычитая из этого уравнения приведенное ранее уравнение стационарного режима для
поскольку
то
Вычитая из этого уравнения приведенное ранее уравнение стационарного режима для
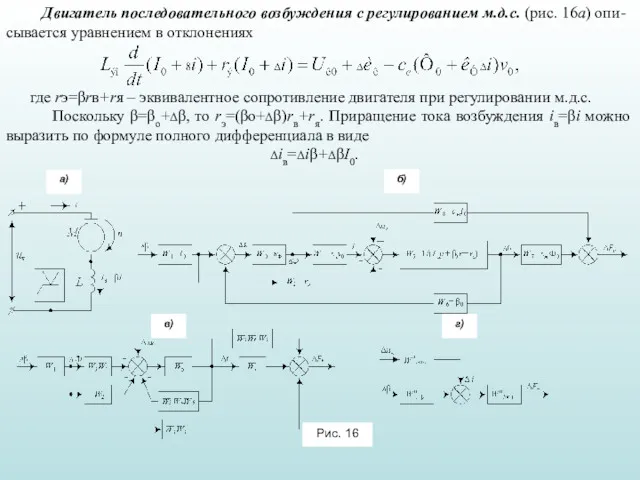
Двигатель последовательного возбуждения с регулированием м.д.с. (рис. 16а) опи-сывается уравнением
Двигатель последовательного возбуждения с регулированием м.д.с. (рис. 16а) опи-сывается уравнением
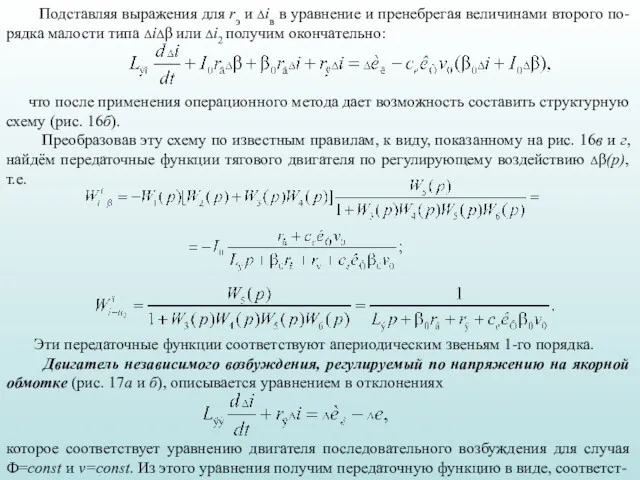
Подставляя выражения для rэ и Δiв в уравнение и пренебрегая
Подставляя выражения для rэ и Δiв в уравнение и пренебрегая
вующем инерционному звену 1-го порядка, т. е.
при этом
Структурные
вующем инерционному звену 1-го порядка, т. е.
при этом
Структурные
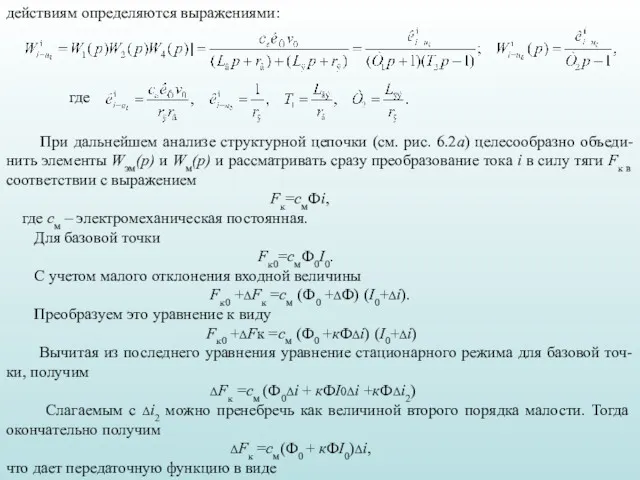
действиям определяются выражениями:
где
При дальнейшем анализе структурной цепочки (см.
действиям определяются выражениями:
где
При дальнейшем анализе структурной цепочки (см.
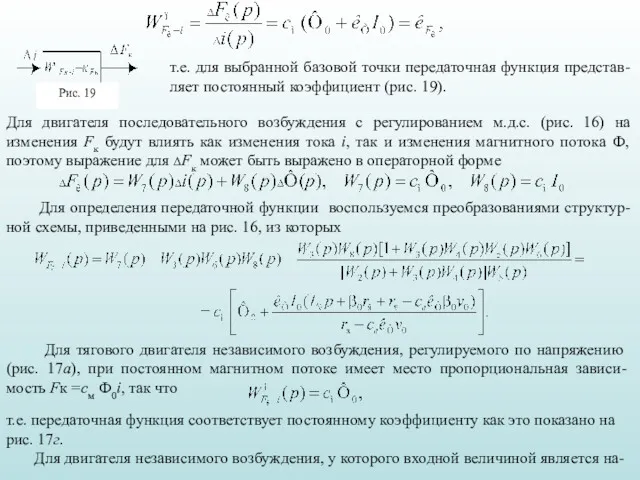
т.е. для выбранной базовой точки передаточная функция представ-ляет постоянный коэффициент (рис.
т.е. для выбранной базовой точки передаточная функция представ-ляет постоянный коэффициент (рис.
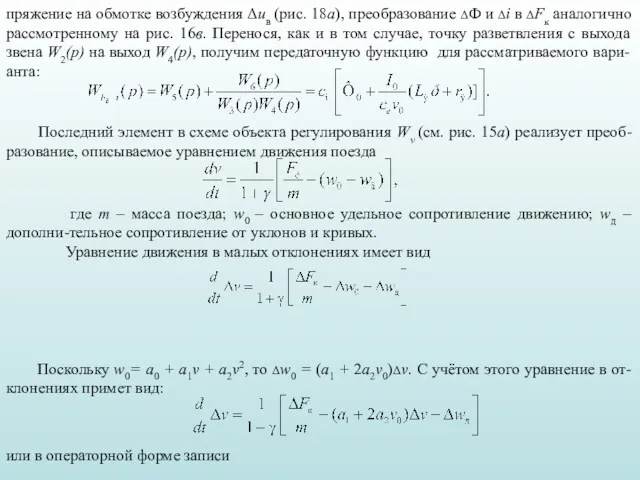
пряжение на обмотке возбуждения Δив (рис. 18а), преобразование ΔФ и Δi
пряжение на обмотке возбуждения Δив (рис. 18а), преобразование ΔФ и Δi
 Роль семьи в формировании межнациональной толерантности у детей старшего дошкольного возраста.
Роль семьи в формировании межнациональной толерантности у детей старшего дошкольного возраста. Разработка программы оптимального распределения энергии для диаграммы направленности антенной решетки
Разработка программы оптимального распределения энергии для диаграммы направленности антенной решетки А.С Пушкин Капитанская дочка
А.С Пушкин Капитанская дочка технология
технология Суточное осевое вращение Земли
Суточное осевое вращение Земли Право международной безопасности. Международное публичное право
Право международной безопасности. Международное публичное право Комплексный центр социального обслуживания населения г. Бородино. Сопровождение семей, имеющих детей-инвалидов
Комплексный центр социального обслуживания населения г. Бородино. Сопровождение семей, имеющих детей-инвалидов История адаптивного спорта для лиц с поражением слуха
История адаптивного спорта для лиц с поражением слуха Презентация игра Четвёртый лишний
Презентация игра Четвёртый лишний Профессиональный стресс. Проявление хронической усталости и психического выгорания
Профессиональный стресс. Проявление хронической усталости и психического выгорания Морская политика России
Морская политика России Презентация Наша жизнь
Презентация Наша жизнь Информационно - коммуникационные технологии в работе с детьми по экологическому воспитанию
Информационно - коммуникационные технологии в работе с детьми по экологическому воспитанию Запорная арматура. Классификация
Запорная арматура. Классификация Биологическое преобразование энергии: дыхание, фотосинтез, хемосинтез
Биологическое преобразование энергии: дыхание, фотосинтез, хемосинтез Интегральное исчисление функций нескольких переменных. Двойные интегралы
Интегральное исчисление функций нескольких переменных. Двойные интегралы подготовка_к_кр_дроби_и_смешанные_числа
подготовка_к_кр_дроби_и_смешанные_числа Фильтры грубой очистки фланцевые MVI серии FF.310. Технический паспорт
Фильтры грубой очистки фланцевые MVI серии FF.310. Технический паспорт Mark Twain
Mark Twain Мышление и культура в этнопсихологии. (Тема 4)
Мышление и культура в этнопсихологии. (Тема 4) Привычки успешных мам
Привычки успешных мам Основания. Состав оснований
Основания. Состав оснований Готовность к школьному обучению
Готовность к школьному обучению Система организации оказания медицинской помощи городскому населению
Система организации оказания медицинской помощи городскому населению ВКР: Имидж гостиничного предприятия (планирование, формирование, продвижение)
ВКР: Имидж гостиничного предприятия (планирование, формирование, продвижение) Издержки фирмы
Издержки фирмы Здравствуй, школа!
Здравствуй, школа! Диагностика острой ревматической лихорадки
Диагностика острой ревматической лихорадки