Понятие динамической системы станка. Динамическое качество станка. Основные задачи динамики станков презентация
- Понятие динамической системы станка. Динамическое качество станка. Основные задачи динамики станков

Содержание
- 2. Рис. 1 Схема замкнутой динамической системы станка а) б) Рис. 2 Область неустойчивости при растачивании
- 3. Рис. 3 Колебания по нормали к поверхности резания в переходном процессе при врезании резца
- 4. Лекция № 2. Статические и динамические характеристики элементов и систем. Передаточная функция динамической системы станка. Виды
- 5. где [M], [C], [K] – матрицы масс, демпфирования и жесткости с постоянными коэффициентами {y}=[y1(t), …, yn(t)]T
- 6. Рис. 8 Амплитудно-фазовая частотная характеристика (АФЧХ) где Re(ω) – вещественная часть, а Im(ω) – мнимая часть
- 7. Рис. 9 Последовательное соединение звеньев а) б) Рис. 10 Параллельное соединение звеньев
- 8. x1(ω) = x(ω) + y2(ω) Рис. 12 Отрицательная обратная связь. Рис. 11 Положительная обратная связь.
- 9. Рис. 13 Передаточные функции динамической системы Рис. 14 Механическая система
- 10. Рис. 15 Эквивалентные упругие системы а) б)
- 11. Лекция № 3. Упругая система станка Динамическая податливость Линеаризация [мм/Н], [мкм/Н] , где eэус и kэус
- 12. , [ мм/Н] , [рад] Рис. 17 Амплитудно-фазовая частотная характеристика системы с одной степенью свободы характеристика
- 13. р=сδ m, где δ – контактное перемещение, р – давление, с и m – коэффициент и
- 14. Рис. 20 Случай работы стыка с частичным раскрыванием (δ0 , где u – безразмерная неотрицательная переменная
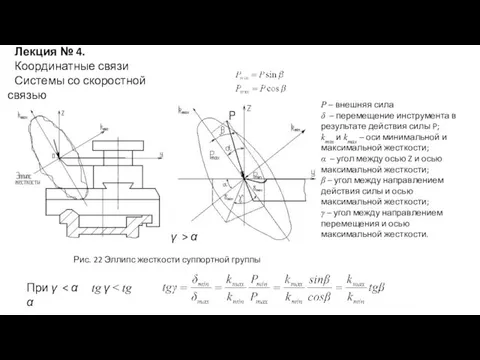
- 15. Лекция № 4. Координатные связи Системы со скоростной связью Рис. 22 Эллипс жесткости суппортной группы P
- 16. Рис. 23 Модель УС суппорта где m1 и m2 – приведенные массы системы, c1 и c2
- 17. Рис. 25 Эпюры распределения скоростей и давления в сечениях клинового зазора, заполненного маслом Рис. 24 Силы
- 18. Рис. 26 Простейшая динамическая система со скоростной связью , где ТВ = Т2ꞌ – постоянная времени
- 19. (1) (2) Рис. 28 Простейшая динамическая система с инерционной связью , где Лекция № 6. Инерционная
- 20. Процесс трения , где , где Рис. 31 Кривая Штрибека , где V >Vкр Рис. 30
- 21. , где βст Рис. 32 Геометрический смысл постоянной β Практическое воздействие на процесс трения осуществляется следующими
- 22. Процесс резания Рис. 33 Вид стружки и колебания силы резания: а) - при образовании стружки надлома;
- 23. Устойчивость перемещения узлов станка Пока x=0 Когда Рис. 36 Упрощенная модель движения, характеризующегося периодической сменой охватывания
- 24. Устойчивость динамической системы станка при резании. – динамическая составляющая силы резания Рис. 39 УС с двумя
- 25. Рис. 41 Построение АФЧХ эквивалентной упругой системы как суммы двух характеристик колебательных систем с одной степенью
- 26. Рис. 43 Устойчивая и неустойчивая характеристики разомкнутой системы Рис. 44 Схема, поясняющая физическую картину потери устойчивости
- 27. Влияние динамической характеристики резания на поведение системы Рис. 48 АФЧХ эквивалентной упругой системы и процесса резания
- 28. Устойчивость динамической системы станка при резании «по следу» Рис. 51 Схема эквивалентной динамической системы с резанием
- 29. Рис. 52 Построение частотной характеристики Wу(ω)
- 30. Рис. 53 Построение характеристики разомкнутой системы с запаздыванием. Если то Рис. 54 Примеры характеристик систем, устойчивых
- 31. Рис. 55 Изменение температуры в поверхностном слое стружки, примыкающем к резцу, и в зоне сдвига Рис.56
- 32. Отклонения системы при внешних воздействиях а) б) Рис. 58 Схема замкнутой эквивалентной динамической системы станка при
- 33. Статические отклонения Рис. 60 Схема обработки при врезной подаче Рис. 61 Соответствующая ей схема замкнутой системы
- 34. Рис. 62 Графическая интерпретация зависимости статической погрешности обработки от безразмерного произведения статических коэффициентов эквивалентной упругой системы
- 37. Скачать презентацию
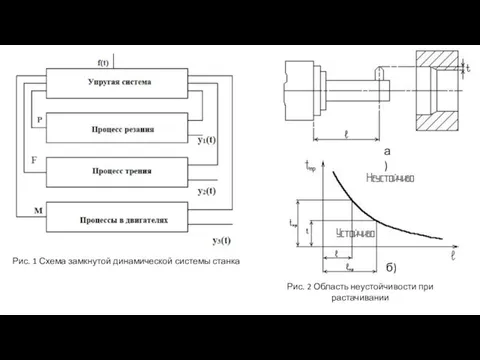
Рис. 1 Схема замкнутой динамической системы станка
а)
б)
Рис. 2 Область неустойчивости при
Рис. 1 Схема замкнутой динамической системы станка
а)
б)
Рис. 2 Область неустойчивости при
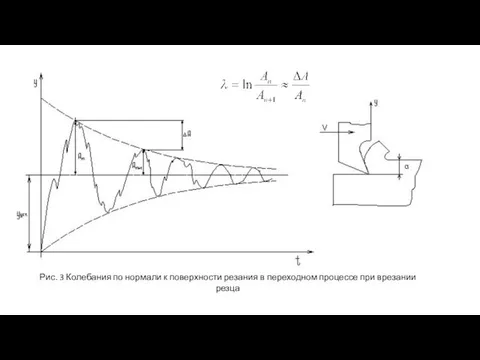
Рис. 3 Колебания по нормали к поверхности резания в переходном процессе
Рис. 3 Колебания по нормали к поверхности резания в переходном процессе
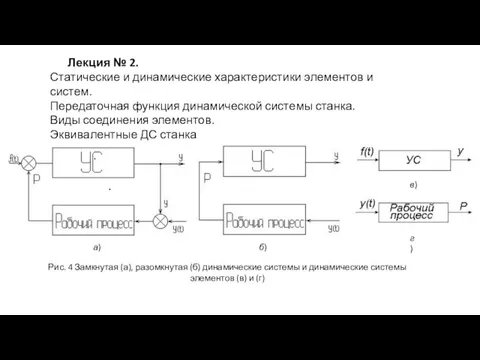
Лекция № 2.
Статические и динамические характеристики элементов и систем.
Передаточная
Лекция № 2.
Статические и динамические характеристики элементов и систем.
Передаточная
![где [M], [C], [K] – матрицы масс, демпфирования и жесткости](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/74084/slide-4.jpg)
где [M], [C], [K] – матрицы масс, демпфирования и жесткости с
где [M], [C], [K] – матрицы масс, демпфирования и жесткости с

Рис. 8 Амплитудно-фазовая частотная характеристика (АФЧХ)
где Re(ω) – вещественная часть, а
Рис. 8 Амплитудно-фазовая частотная характеристика (АФЧХ)
где Re(ω) – вещественная часть, а
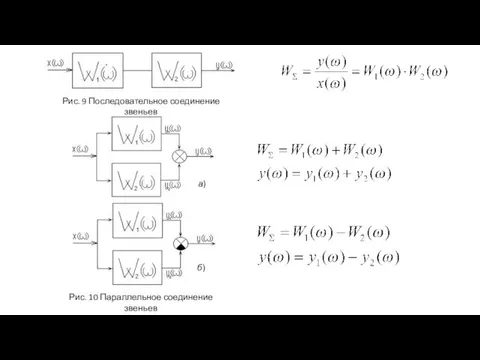
Рис. 9 Последовательное соединение звеньев
а)
б)
Рис. 10 Параллельное соединение звеньев
Рис. 9 Последовательное соединение звеньев
а)
б)
Рис. 10 Параллельное соединение звеньев

x1(ω) = x(ω) + y2(ω)
Рис. 12 Отрицательная обратная связь.
Рис. 11
x1(ω) = x(ω) + y2(ω)
Рис. 12 Отрицательная обратная связь.
Рис. 11
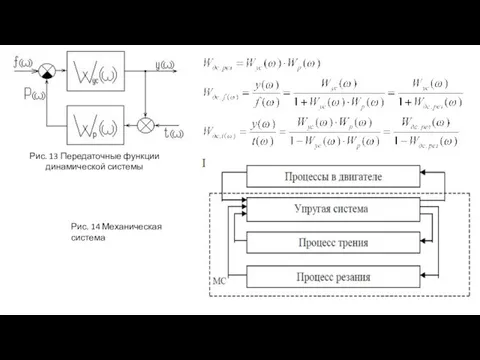
Рис. 13 Передаточные функции динамической системы
Рис. 14 Механическая система
Рис. 13 Передаточные функции динамической системы
Рис. 14 Механическая система
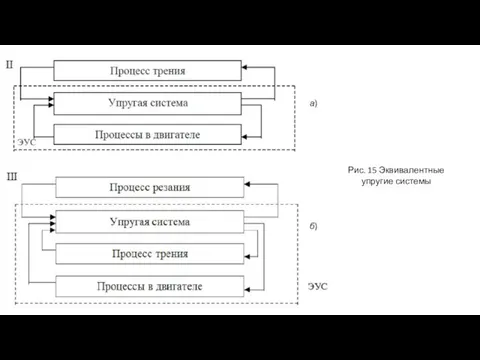
Рис. 15 Эквивалентные упругие системы
а)
б)
Рис. 15 Эквивалентные упругие системы
а)
б)
![Лекция № 3. Упругая система станка Динамическая податливость Линеаризация [мм/Н],](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/74084/slide-10.jpg)
Лекция № 3.
Упругая система станка
Динамическая податливость
Линеаризация
[мм/Н], [мкм/Н]
, где eэус и
Лекция № 3.
Упругая система станка
Динамическая податливость
Линеаризация
[мм/Н], [мкм/Н]
, где eэус и
![, [ мм/Н] , [рад] Рис. 17 Амплитудно-фазовая частотная характеристика](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/74084/slide-11.jpg)
, [ мм/Н]
, [рад]
Рис. 17 Амплитудно-фазовая частотная характеристика системы с одной
, [ мм/Н]
, [рад]
Рис. 17 Амплитудно-фазовая частотная характеристика системы с одной

р=сδ m, где δ – контактное перемещение, р – давление,
р=сδ m, где δ – контактное перемещение, р – давление,

Рис. 20 Случай работы стыка с частичным раскрыванием (δ0<|ϕL/2|)
, где u
Рис. 20 Случай работы стыка с частичным раскрыванием (δ0<|ϕL/2|)
, где u
Лекция № 4.
Координатные связи
Системы со скоростной связью
Рис. 22 Эллипс жесткости
Лекция № 4.
Координатные связи
Системы со скоростной связью
Рис. 22 Эллипс жесткости

Рис. 23 Модель УС суппорта
где m1 и m2 – приведенные массы
Рис. 23 Модель УС суппорта
где m1 и m2 – приведенные массы
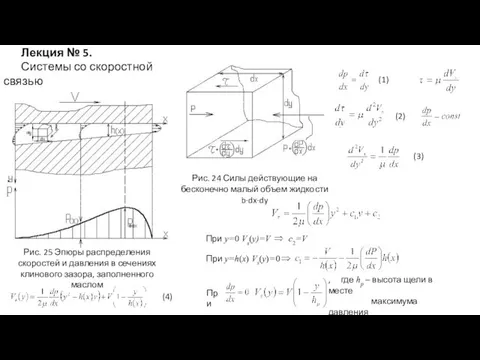
Рис. 25 Эпюры распределения скоростей и давления в сечениях клинового зазора,
Рис. 25 Эпюры распределения скоростей и давления в сечениях клинового зазора,

Рис. 26 Простейшая динамическая система со скоростной связью
, где ТВ
Рис. 26 Простейшая динамическая система со скоростной связью
, где ТВ

(1)
(2)
Рис. 28 Простейшая динамическая система с инерционной связью
, где
Лекция №
(1)
(2)
Рис. 28 Простейшая динамическая система с инерционной связью
, где
Лекция №

Процесс трения
, где
, где
Рис. 31 Кривая Штрибека
, где V >Vкр
Рис. 30
Процесс трения
, где
, где
Рис. 31 Кривая Штрибека
, где V >Vкр
Рис. 30

, где
βст
Рис. 32 Геометрический смысл постоянной β
Практическое воздействие на процесс
, где
βст
Рис. 32 Геометрический смысл постоянной β
Практическое воздействие на процесс
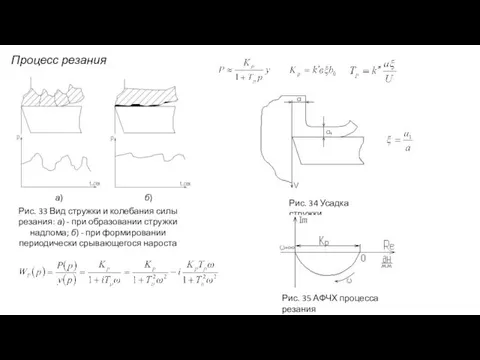
Процесс резания
Рис. 33 Вид стружки и колебания силы резания: а) -
Процесс резания
Рис. 33 Вид стружки и колебания силы резания: а) -
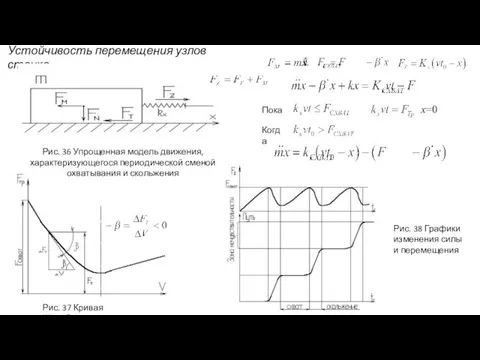
Устойчивость перемещения узлов станка
Пока x=0
Когда
Рис. 36 Упрощенная модель движения, характеризующегося периодической
Устойчивость перемещения узлов станка
Пока x=0
Когда
Рис. 36 Упрощенная модель движения, характеризующегося периодической

Устойчивость динамической системы станка при резании.
– динамическая составляющая
силы резания
Рис. 39
Устойчивость динамической системы станка при резании.
– динамическая составляющая
силы резания
Рис. 39
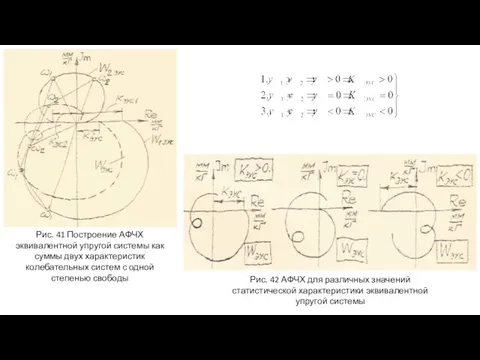
Рис. 41 Построение АФЧХ эквивалентной упругой системы как суммы двух характеристик
Рис. 41 Построение АФЧХ эквивалентной упругой системы как суммы двух характеристик
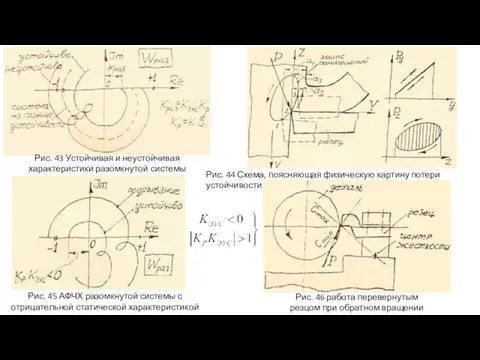
Рис. 43 Устойчивая и неустойчивая характеристики разомкнутой системы
Рис. 44 Схема, поясняющая
Рис. 43 Устойчивая и неустойчивая характеристики разомкнутой системы
Рис. 44 Схема, поясняющая

Влияние динамической характеристики резания на поведение системы
Рис. 48 АФЧХ эквивалентной упругой
Влияние динамической характеристики резания на поведение системы
Рис. 48 АФЧХ эквивалентной упругой
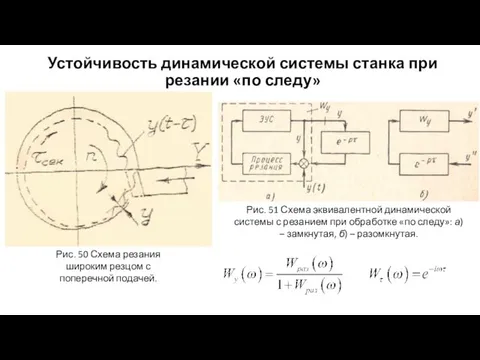
Устойчивость динамической системы станка при резании «по следу»
Рис. 51 Схема эквивалентной
Устойчивость динамической системы станка при резании «по следу»
Рис. 51 Схема эквивалентной
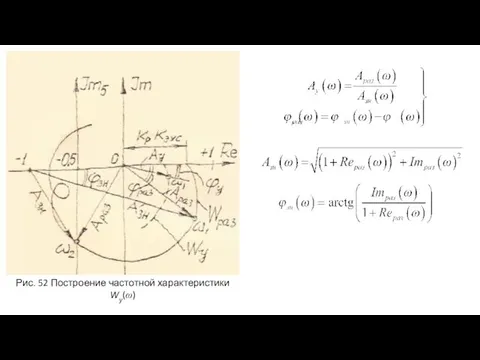
Рис. 52 Построение частотной характеристики Wу(ω)
Рис. 52 Построение частотной характеристики Wу(ω)
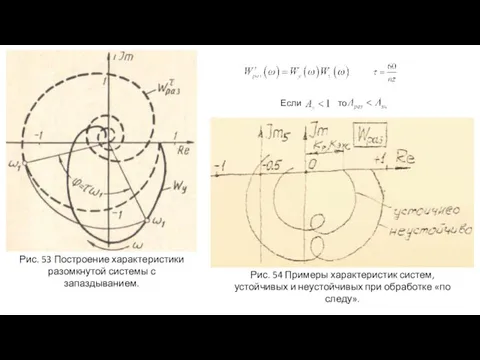
Рис. 53 Построение характеристики разомкнутой системы с запаздыванием.
Если то
Рис. 54 Примеры
Рис. 53 Построение характеристики разомкнутой системы с запаздыванием.
Если то
Рис. 54 Примеры
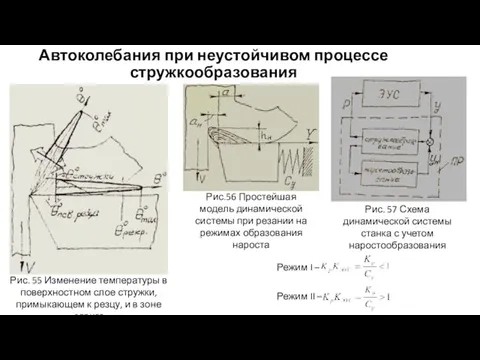
Рис. 55 Изменение температуры в поверхностном слое стружки, примыкающем к резцу,
Рис. 55 Изменение температуры в поверхностном слое стружки, примыкающем к резцу,
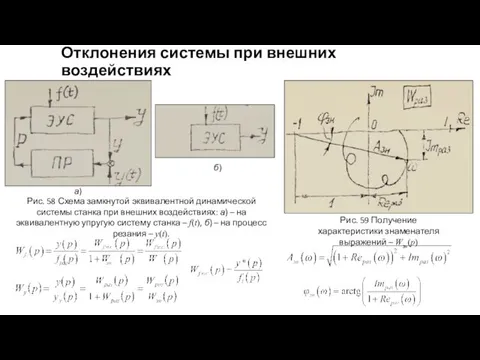
Отклонения системы при внешних воздействиях
а)
б)
Рис. 58 Схема замкнутой эквивалентной динамической системы
Отклонения системы при внешних воздействиях
а)
б)
Рис. 58 Схема замкнутой эквивалентной динамической системы
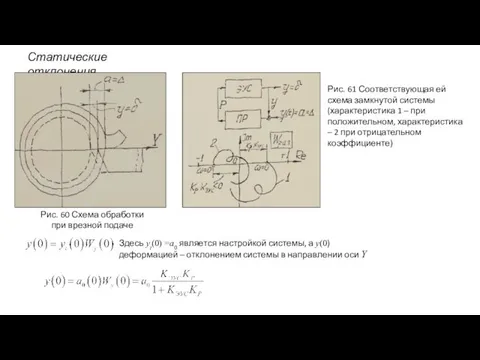
Статические отклонения
Рис. 60 Схема обработки при врезной подаче
Рис. 61 Соответствующая
Статические отклонения
Рис. 60 Схема обработки при врезной подаче
Рис. 61 Соответствующая

Рис. 62 Графическая интерпретация зависимости статической погрешности обработки от безразмерного произведения
Рис. 62 Графическая интерпретация зависимости статической погрешности обработки от безразмерного произведения

 Кровотечения. Классификация кровотечений
Кровотечения. Классификация кровотечений Управление товарно - материальными запасами
Управление товарно - материальными запасами Крыши, покрытия, кровли
Крыши, покрытия, кровли Презентация Формирование познавательных интересов у учащихся на уроках физики.
Презентация Формирование познавательных интересов у учащихся на уроках физики. Особенности организации и обеспечения деятельности органов военной прокуратуры
Особенности организации и обеспечения деятельности органов военной прокуратуры Презентация к уроку по теме Антарктида.
Презентация к уроку по теме Антарктида. Поговорил бы кто со мной...Телефон доверия.
Поговорил бы кто со мной...Телефон доверия.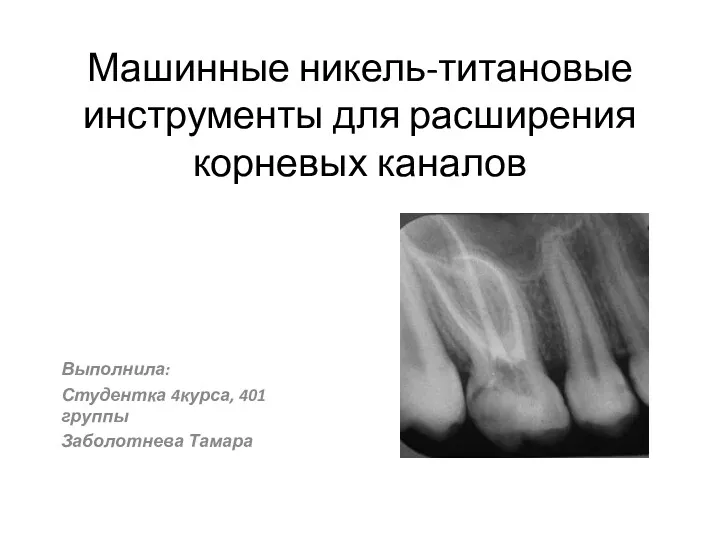 Машинные никель-титановые инструменты для расширения корневых каналов
Машинные никель-титановые инструменты для расширения корневых каналов Предметно-пространственная среда в старшей группе
Предметно-пространственная среда в старшей группе Урок технологии по модулю Практикум работы на компьютере
Урок технологии по модулю Практикум работы на компьютере Общее Равновесие в Закрытой Экономике (модель IS-LM)
Общее Равновесие в Закрытой Экономике (модель IS-LM) Каирский египетский музей
Каирский египетский музей Древняя Греция (5 класс)
Древняя Греция (5 класс) Экономические отношения и отношения собственности
Экономические отношения и отношения собственности Роговица. Свойства и функции роговицы
Роговица. Свойства и функции роговицы электронное портфолио
электронное портфолио Биотехнология продуктов из молочного белково-углеводного сырья
Биотехнология продуктов из молочного белково-углеводного сырья Коллекция автомобилей
Коллекция автомобилей горные породы слагающие земную кору.
горные породы слагающие земную кору. Промежуточные рельсовые скрепления. Основные типы
Промежуточные рельсовые скрепления. Основные типы Скотоводство и технология производства молока и говядины 2
Скотоводство и технология производства молока и говядины 2 Презентация. Гендерный подход в воспитании дошкольников.
Презентация. Гендерный подход в воспитании дошкольников. Реализация программы по духовно-нравственному развитию и воспитанию учащихся. Благотворительная акция Милосердие
Реализация программы по духовно-нравственному развитию и воспитанию учащихся. Благотворительная акция Милосердие презентация к уроку Нуклеиновые кислоты
презентация к уроку Нуклеиновые кислоты Радиолокация. Классификация и виды
Радиолокация. Классификация и виды Критерии деления кормов на диетические и повседневные
Критерии деления кормов на диетические и повседневные Функциональная анатомия органов мужской половой системы
Функциональная анатомия органов мужской половой системы Дифференциальный диагноз при мочевом синдроме
Дифференциальный диагноз при мочевом синдроме