- Потери и КПД асинхронного двигателя

Содержание
- 2. СОДЕРЖАНИЕ 1. ПОТЕРИ: 1.1. ОСНОВНЫЕ: - МАГНИТНЫЕ; - ЭЛЕКТРИЧЕСКИЕ; - МЕХАНИЧЕСКИЕ. 1.2. ДОБАВОЧНЫЕ 2. КПД
- 3. ПОТЕРИ Сумма всех потерь асинхронного двигателя (Вт) (8) На рисунке 1 представлена энергетическая диаграмма асинхронного двигателя,
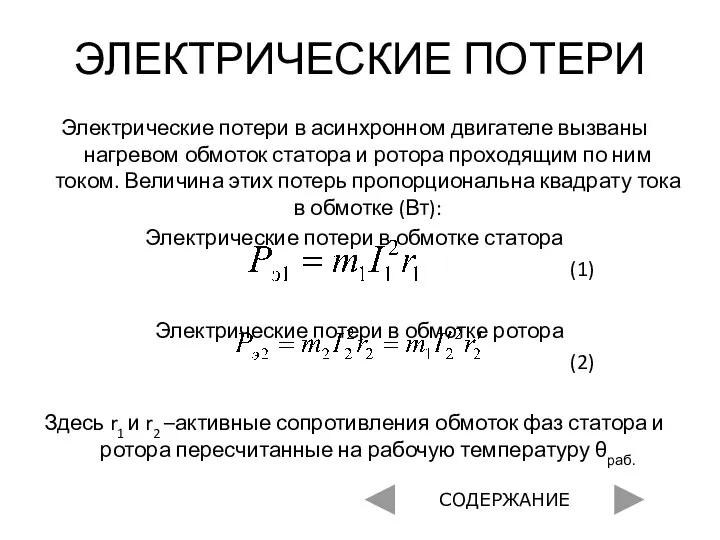
- 4. ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящим по ним
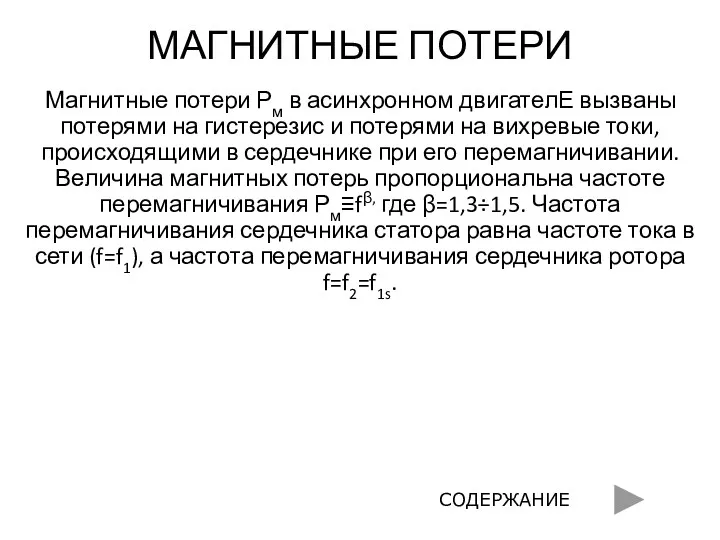
- 5. МАГНИТНЫЕ ПОТЕРИ Магнитные потери Рм в асинхронном двигателЕ вызваны потерями на гистерезис и потерями на вихревые
- 6. МАГНИТНЫЕ ПОТЕРИ При частоте тока в сети f1=50 Гц и номинальном скольжении Sном=1÷8% частота перемагничивания ротора
- 7. ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ (3) где r1.20 и r2.20 – активные сопротивления обмоток при температуре θ1=20ºС; α- температурный
- 8. МЕХАНИЧЕСКИЕ ПОТЕРИ Механические потери Рмех – это потери на трение в подшипниках и на вентиляцию. Величина
- 9. ДОБАВОЧНЫЕ ПОТЕРИ. Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС,
- 10. У асинхронного двигателя КПД (9) Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки меняет свою величину:
- 11. График зависимости КПД от нагрузки η=f(B) для асинхронных двигателей имеет вид, аналогичный представленному на рисунке 2.
- 12. КПД Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства -
- 13. Рис. 1 Энергетическая диаграмма асинхронного двигателя СОДЕРЖАНИЕ
- 15. Скачать презентацию
СОДЕРЖАНИЕ
1. ПОТЕРИ:
1.1. ОСНОВНЫЕ:
- МАГНИТНЫЕ;
- ЭЛЕКТРИЧЕСКИЕ;
- МЕХАНИЧЕСКИЕ.
1.2. ДОБАВОЧНЫЕ
2. КПД
СОДЕРЖАНИЕ
1. ПОТЕРИ:
1.1. ОСНОВНЫЕ:
- МАГНИТНЫЕ;
- ЭЛЕКТРИЧЕСКИЕ;
- МЕХАНИЧЕСКИЕ.
1.2. ДОБАВОЧНЫЕ
2. КПД
ПОТЕРИ
Сумма всех потерь асинхронного двигателя (Вт)
(8)
На рисунке 1 представлена энергетическая
ПОТЕРИ
Сумма всех потерь асинхронного двигателя (Вт)
(8)
На рисунке 1 представлена энергетическая
ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и
ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и
МАГНИТНЫЕ ПОТЕРИ
Магнитные потери Рм в асинхронном двигателЕ вызваны потерями на гистерезис
МАГНИТНЫЕ ПОТЕРИ
Магнитные потери Рм в асинхронном двигателЕ вызваны потерями на гистерезис
МАГНИТНЫЕ ПОТЕРИ
При частоте тока в сети f1=50 Гц и номинальном скольжении
МАГНИТНЫЕ ПОТЕРИ
При частоте тока в сети f1=50 Гц и номинальном скольжении
ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ
(3) где r1.20 и r2.20 – активные сопротивления обмоток
ЭЛЕКТРИЧЕСКИЕ ПОТЕРИ
(3) где r1.20 и r2.20 – активные сопротивления обмоток
МЕХАНИЧЕСКИЕ ПОТЕРИ
Механические потери Рмех – это потери на трение в подшипниках
МЕХАНИЧЕСКИЕ ПОТЕРИ
Механические потери Рмех – это потери на трение в подшипниках
ДОБАВОЧНЫЕ ПОТЕРИ.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных
ДОБАВОЧНЫЕ ПОТЕРИ.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных
У асинхронного двигателя КПД
(9)
Коэффициент полезного действия асинхронного двигателя с изменениями
У асинхронного двигателя КПД
(9)
Коэффициент полезного действия асинхронного двигателя с изменениями
График зависимости КПД от нагрузки η=f(B) для асинхронных двигателей имеет вид,
График зависимости КПД от нагрузки η=f(B) для асинхронных двигателей имеет вид,
КПД
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим
КПД
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим
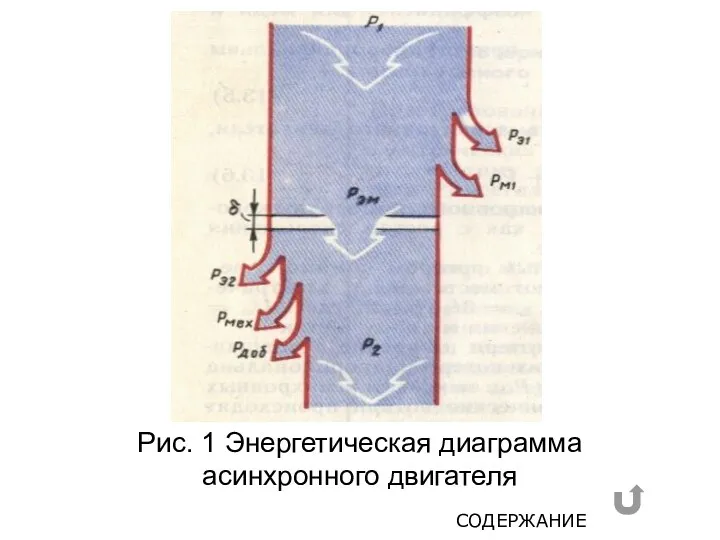
Рис. 1 Энергетическая диаграмма
асинхронного двигателя
СОДЕРЖАНИЕ
Рис. 1 Энергетическая диаграмма
асинхронного двигателя
СОДЕРЖАНИЕ
 ПРЕЗЕНТАЦИЯ ЗАКОН ОБ ОБРАЗОВАНИИ ДЛЯ РОДИТЕЛЕЙ
ПРЕЗЕНТАЦИЯ ЗАКОН ОБ ОБРАЗОВАНИИ ДЛЯ РОДИТЕЛЕЙ Composite insulators
Composite insulators Конкурсная игра Цифра семь известна всем
Конкурсная игра Цифра семь известна всем Понятие сущности морали
Понятие сущности морали Спасо-Казанский женский монастырь
Спасо-Казанский женский монастырь Упаковочные автоматы для твердых сыпучих лекарственных форм
Упаковочные автоматы для твердых сыпучих лекарственных форм Птицы города Оренбурга
Птицы города Оренбурга Конструкционные функциональные волокнистые композиты. Полимерные матричные материалы
Конструкционные функциональные волокнистые композиты. Полимерные матричные материалы Призентация Оригами
Призентация Оригами Металлы
Металлы Использование цветотерапии в коррекции эмоциональной сферы детей с ЗПР
Использование цветотерапии в коррекции эмоциональной сферы детей с ЗПР Однородные члены предложения. Пунктуация
Однородные члены предложения. Пунктуация Презентация по ПДД Дорожные знаки
Презентация по ПДД Дорожные знаки Прямой маркетинг
Прямой маркетинг Секрет происхождения арабских цифр
Секрет происхождения арабских цифр Тест-презентация по теме Электролитическая диссоциация веществ. Реакции ионного обмена. 9 кл
Тест-презентация по теме Электролитическая диссоциация веществ. Реакции ионного обмена. 9 кл Показатели, прогнозируемые в сфере Образование и культура
Показатели, прогнозируемые в сфере Образование и культура Логарифмический вычет
Логарифмический вычет Әкімшілік іс жүргізудегі хабарлама беру және жәбірленушінің ісін қарау
Әкімшілік іс жүргізудегі хабарлама беру және жәбірленушінің ісін қарау Працевлаштування випускників вузів. Гарантії держави. Пошук вакансій. Складання резюме
Працевлаштування випускників вузів. Гарантії держави. Пошук вакансій. Складання резюме Сельское хозяйство США
Сельское хозяйство США Исследования грунтов в приборах трёхосного сжатия
Исследования грунтов в приборах трёхосного сжатия Презентация к классному часу Спешите делать добро
Презентация к классному часу Спешите делать добро Интеграция ФЭМП в разных образовательных областях
Интеграция ФЭМП в разных образовательных областях Борьба России со Швецией
Борьба России со Швецией Невротические расстройства (неврозы). Общая часть
Невротические расстройства (неврозы). Общая часть ABA - терапия, метод прикладного анализа поведения
ABA - терапия, метод прикладного анализа поведения Правописание наречий. Знаки препинания при вводных словах. Знаки препинания при прямой речи
Правописание наречий. Знаки препинания при вводных словах. Знаки препинания при прямой речи