- Принцип действия и режимы работы электрических машин переменного тока

Содержание
- 3. Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося
- 4. Двигательный режим. Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает
- 5. При включении обмотки статора в сеть трех-фазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой
- 6. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и
- 7. При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен
- 8. Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением SHOM. Для асинхронных двигателей общего назначения SHOM =
- 9. Преобразовав выражение S = (n1 – n2)/ n1, получим формулу для определения асинхронной частоты вращения (об/мин):
- 10. Пример: Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает от сети с частотой тока
- 11. В генераторном режиме частота вращения ротора должна соответствовать синхронной частоте двигателя, которая выше его рабочей (асинхронной)
- 12. Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего
- 13. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент
- 14. В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную
- 15. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора,
- 16. Режим торможения противовключением. У асинхронного двигателя есть два рабочих тормозных режима: динамический, режим противовключения и режим
- 17. Асинхронный двигатель можно перевести в режим торможения противовключением двумя способами: 1. Введением реостата в цепь ротора
- 18. Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных
- 19. Ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент
- 20. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности
- 21. Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1
- 22. Характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля статора n1 и ротора n2,
- 24. Скачать презентацию
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность
Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность
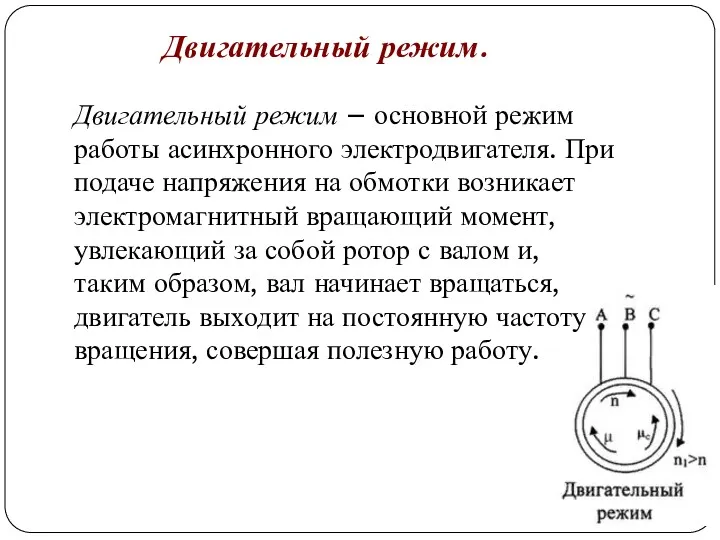
Двигательный режим.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче
Двигательный режим.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче
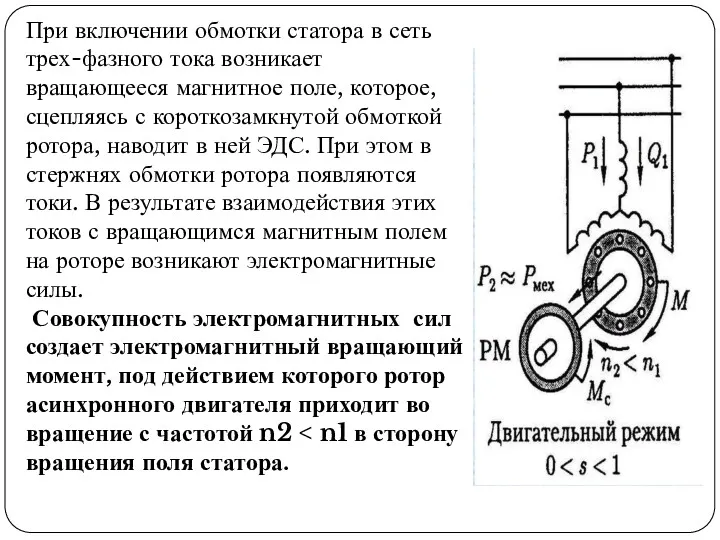
При включении обмотки статора в сеть трех-фазного тока возникает вращающееся магнитное
При включении обмотки статора в сеть трех-фазного тока возникает вращающееся магнитное
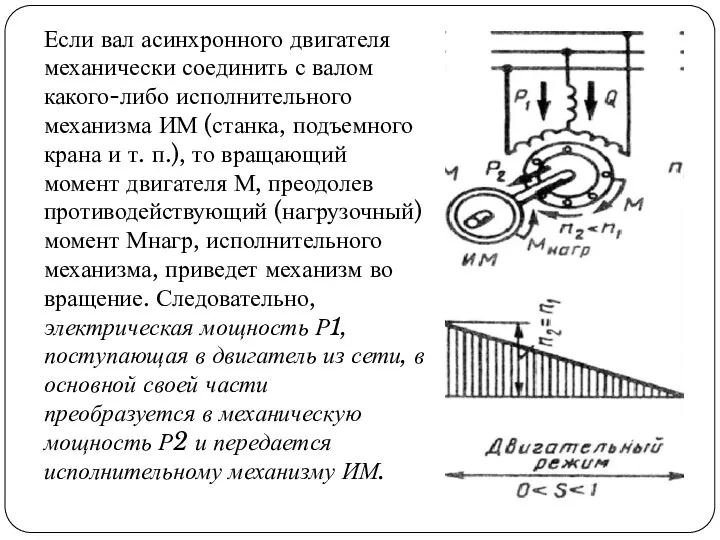
Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма
Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма
При включении асинхронного двигателя в сеть в начальный момент времени ротор
При включении асинхронного двигателя в сеть в начальный момент времени ротор
Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением SHOM.
Для асинхронных
Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением SHOM.
Для асинхронных
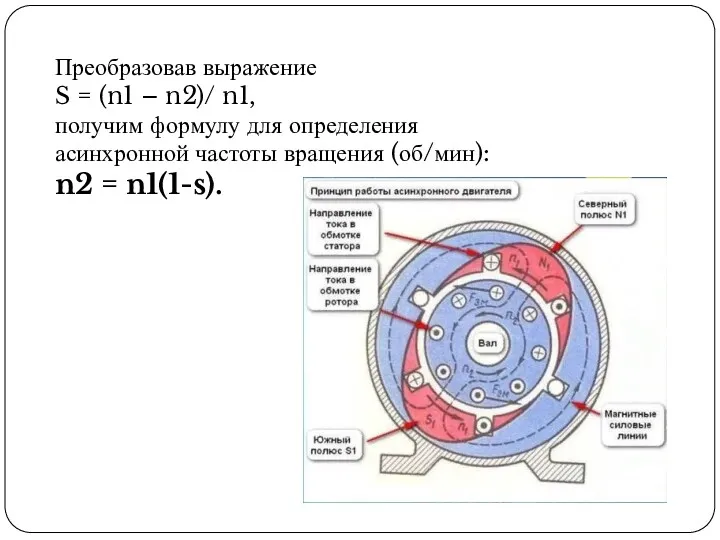
Преобразовав выражение
S = (n1 – n2)/ n1,
получим формулу для определения
Преобразовав выражение
S = (n1 – n2)/ n1,
получим формулу для определения
Пример: Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает
Пример: Трехфазный асинхронный двигатель с числом полюсов 2р = 4 работает
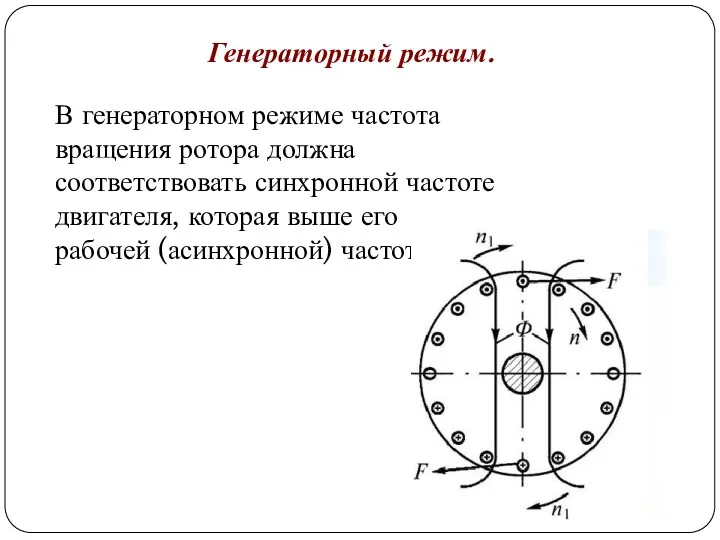
В генераторном режиме частота вращения ротора должна соответствовать синхронной частоте двигателя,
В генераторном режиме частота вращения ротора должна соответствовать синхронной частоте двигателя,
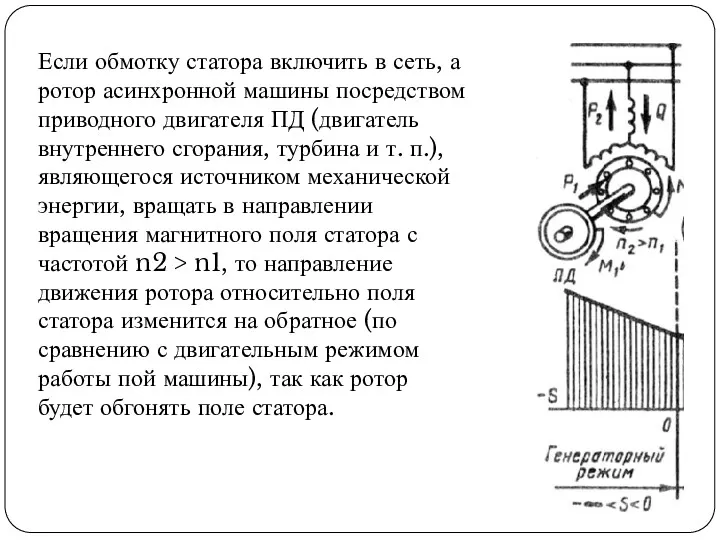
Если обмотку статора включить в сеть, а ротор асинхронной машины посредством
Если обмотку статора включить в сеть, а ротор асинхронной машины посредством
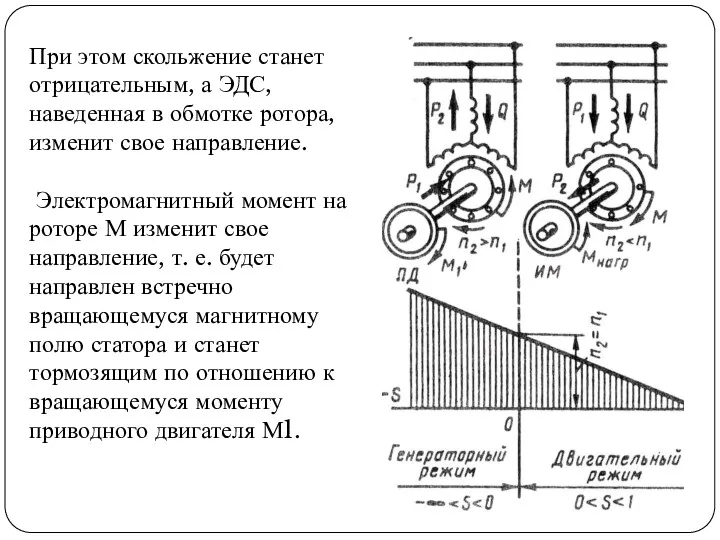
При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора,
При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора,
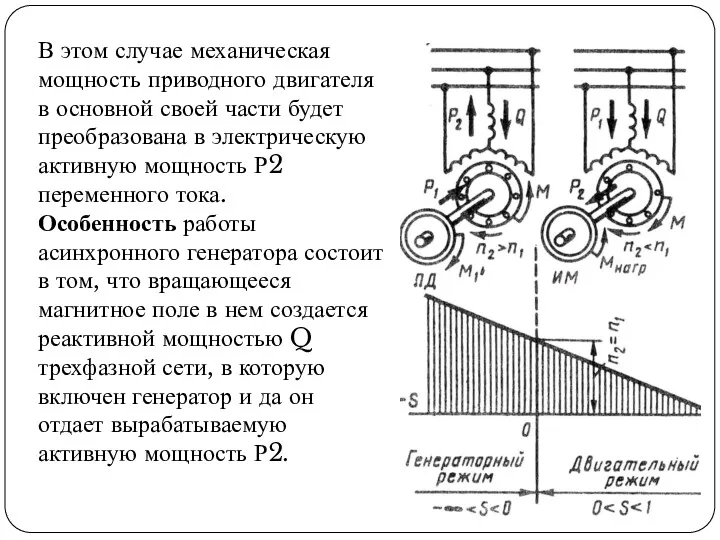
В этом случае механическая мощность приводного двигателя в основной своей части
В этом случае механическая мощность приводного двигателя в основной своей части
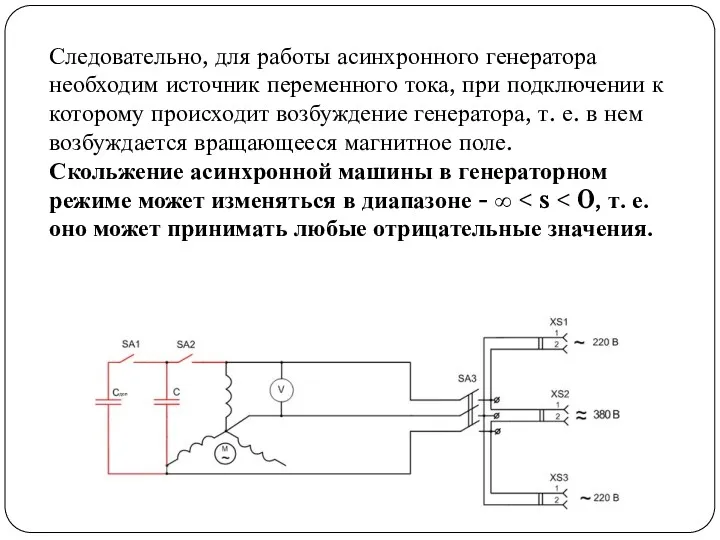
Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении
Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении
Режим торможения противовключением.
У асинхронного двигателя есть два рабочих тормозных режима: динамический,
Режим торможения противовключением.
У асинхронного двигателя есть два рабочих тормозных режима: динамический,
Асинхронный двигатель можно перевести в режим торможения противовключением двумя способами:
1. Введением
Асинхронный двигатель можно перевести в режим торможения противовключением двумя способами:
1. Введением
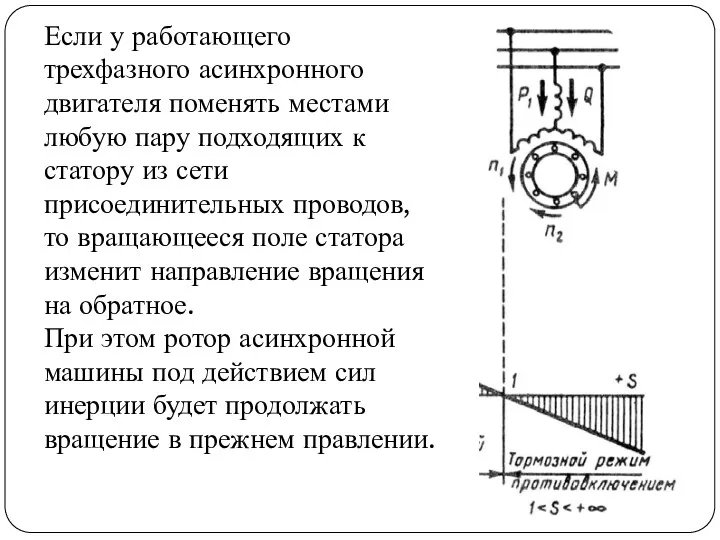
Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих
Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих
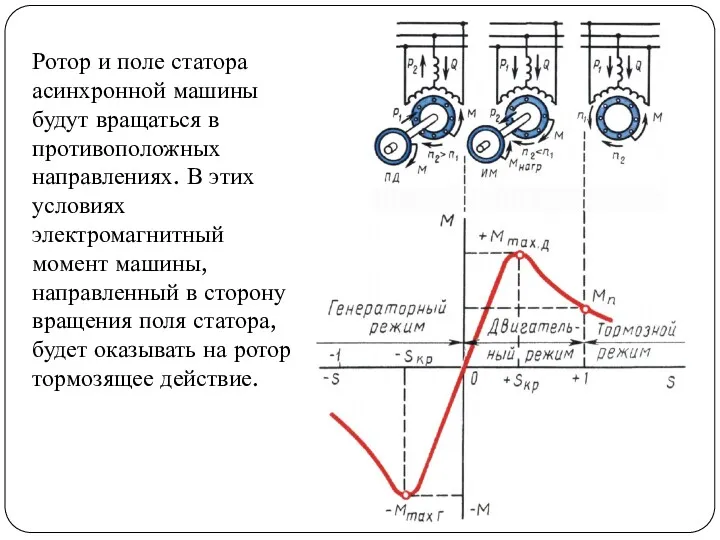
Ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях.
Ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях.
Активная мощность, поступающая из сети в машину при этом режиме, частично
Активная мощность, поступающая из сети в машину при этом режиме, частично

Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне
Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне
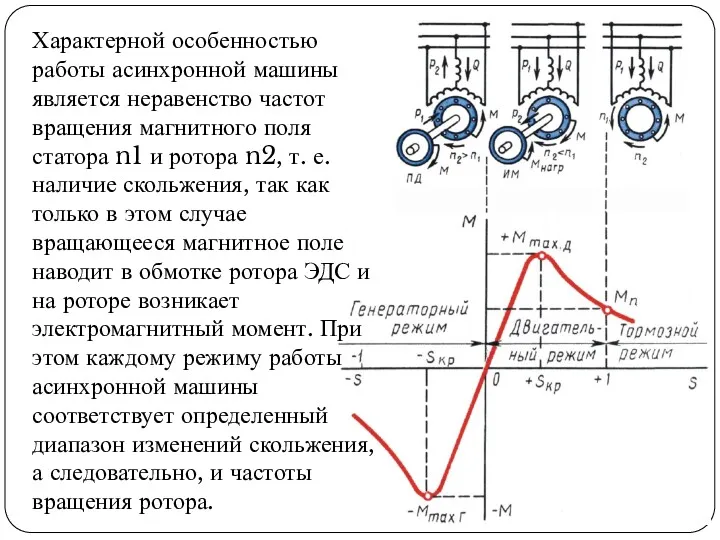
Характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля
Характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля
 Биологические науки. Интерактивный кроссворд
Биологические науки. Интерактивный кроссворд ТБ на летних каникулах
ТБ на летних каникулах Кремнийорганикалық қосылыстар
Кремнийорганикалық қосылыстар Арифметические и логические основы работы компьютера
Арифметические и логические основы работы компьютера Верховино 1917-1920
Верховино 1917-1920 Дополнительная общеобразовательная программа Малая тимирязевка
Дополнительная общеобразовательная программа Малая тимирязевка Элементы IА-группы и их соединения
Элементы IА-группы и их соединения География 6 класс Изображение на плане неровностей земной поверхности
География 6 класс Изображение на плане неровностей земной поверхности Мышечная ткань. Мышцы частей тела
Мышечная ткань. Мышцы частей тела 200 лет Царскосельскому лицею
200 лет Царскосельскому лицею Избирательная система
Избирательная система Избирательное право. Избирательные системы их виды
Избирательное право. Избирательные системы их виды Ко Дню Защитника Отечества.
Ко Дню Защитника Отечества. История медиа. Наскальные рисунки индейцев
История медиа. Наскальные рисунки индейцев Презентация Рефлексия
Презентация Рефлексия Цветная металлургия
Цветная металлургия Осложнения в процессе бурения скважин
Осложнения в процессе бурения скважин Человекообразные обезьяны
Человекообразные обезьяны Managementul integrat al pacienților cu diaree
Managementul integrat al pacienților cu diaree презентация на тему Метод проектов в ДОУ
презентация на тему Метод проектов в ДОУ Презентация конкурса Мамочка милая, мама моя!
Презентация конкурса Мамочка милая, мама моя! Презентация Пасхальная викторина
Презентация Пасхальная викторина Проект Аты-баты, шли солдаты в подготовительной к школе группе
Проект Аты-баты, шли солдаты в подготовительной к школе группе Конструкции элементов полупроводниковых ИС на МДП-транзисторах
Конструкции элементов полупроводниковых ИС на МДП-транзисторах X областной кинофестиваль для детей, юношества и семьи
X областной кинофестиваль для детей, юношества и семьи презентация по химии Техника безопасности
презентация по химии Техника безопасности Производство конструкционных материалов
Производство конструкционных материалов Меры безопасности при переходе железной дороги и автомобильных дорог
Меры безопасности при переходе железной дороги и автомобильных дорог