Приведение параметров обмотки ротора к обмотке статора асинхронной машины. Векторная диаграмма асинхронного двигателя презентация
- Приведение параметров обмотки ротора к обмотке статора асинхронной машины. Векторная диаграмма асинхронного двигателя

Содержание
- 2. 9.1. Приведение параметров обмотки ротора к обмотке статора асинхронной машины Чтобы векторы ЭДС, напряжений и токов
- 3. При s=1 приведенная ЭДС ротора (9.1) где — коэффициент трансформации напряжения в асинхронной машине при неподвижном
- 4. В отличие от трансформаторов в асинхронных двигателях коэффициенты трансформации напряжения и тока не равны (kе≠ki). Объясняется
- 5. Число фаз т2 и число витков w2 для короткозамкнутой обмотки ротора определяют следующим образом. Каждый стержень
- 6. Подставив в (3.12) приведенные значения параметров обмотки ротора Е′2, I′2, r′2 и х′2, получим уравнение напряжений
- 7. 9.2. Векторная диаграмма асинхронного двигателя Для асинхронного двигателя (так же как и для трансформатора) можно построить
- 8. Угол сдвига фаз между ЭДС Е′2 и током I′2 . Так как векторную диаграмму асинхронного двигателя
- 9. Рис. 9.1. Векторная диаграмма асинхронного двигателя
- 10. На рис. 9.1 представлена векторная диаграмма асинхронного двигателя. От векторной диаграммы трансформатора (см. рис. 1.8) она
- 11. Однако если падение напряжения рассматривать как напряжение на некоторой активной нагрузке , подключенной на зажимы неподвижного
- 12. Иначе говоря, асинхронный двигатель в электрическом отношении подобен трансформатору, работающему на чисто активную нагрузку. Активная мощность
- 13. 9.3. Схема замещения асинхронного двигателя Уравнениям напряжений и токов, а также векторной диаграмме асинхронного двигателя соответствует
- 14. На рис. 3.5, а представлена Т-образная схема замещения. Рис. 3.5. Схемы замещения асинхронного двигателя: а) Т-образная
- 15. Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме замещения заменена электрической связью цепей
- 16. Сопротивление — единственный переменный параметр схемы. Значение этого сопротивления определяется скольжением, а следовательно, механической нагрузкой на
- 17. Если же нагрузочный момент на валу двигателя превышает его вращающий момент, то ротор останавливается (s=1). При
- 18. Чтобы при этом намагничивающий ток I0 не изменил своего значения, в этот контур последовательно включают сопротивления
- 19. Расчет параметров рабочего контура Г-образной схемы замещения требует уточнения, что достигается введением в расчетные формулы коэффициента
- 20. Так как в этом режиме ток холостого хода асинхронного двигателя весьма мал, то U1 оказывается лишь
- 21. Возникшие при этом неточности не превысят значений, допустимых при технических расчетах. Например, при расчете тока ротора
- 23. Скачать презентацию
9.1. Приведение параметров обмотки ротора к обмотке статора асинхронной машины
Чтобы векторы
9.1. Приведение параметров обмотки ротора к обмотке статора асинхронной машины
Чтобы векторы
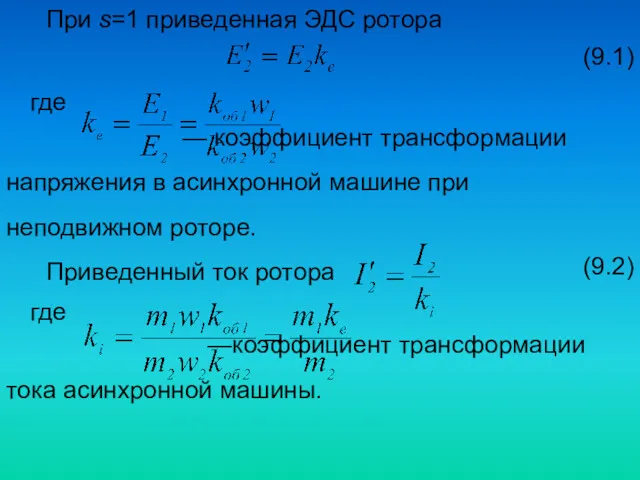
При s=1 приведенная ЭДС ротора
(9.1)
где
— коэффициент трансформации напряжения в
При s=1 приведенная ЭДС ротора
(9.1)
где
— коэффициент трансформации напряжения в
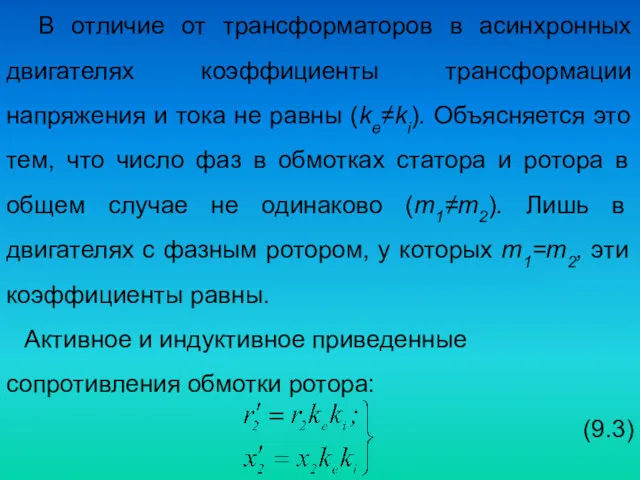
В отличие от трансформаторов в асинхронных двигателях коэффициенты трансформации напряжения и
В отличие от трансформаторов в асинхронных двигателях коэффициенты трансформации напряжения и
Число фаз т2 и число витков w2 для короткозамкнутой обмотки ротора
Число фаз т2 и число витков w2 для короткозамкнутой обмотки ротора
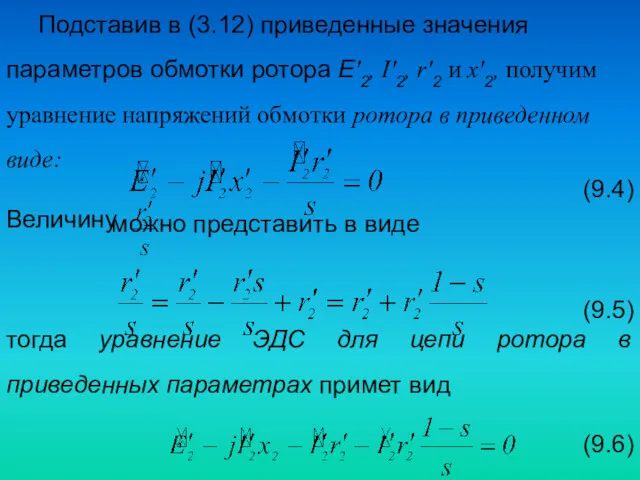
Подставив в (3.12) приведенные значения параметров обмотки ротора Е′2, I′2, r′2
Подставив в (3.12) приведенные значения параметров обмотки ротора Е′2, I′2, r′2
9.2. Векторная диаграмма асинхронного двигателя
Для асинхронного двигателя (так же как
9.2. Векторная диаграмма асинхронного двигателя
Для асинхронного двигателя (так же как
Угол сдвига фаз между ЭДС Е′2 и током I′2
.
Так как векторную
Угол сдвига фаз между ЭДС Е′2 и током I′2
.
Так как векторную
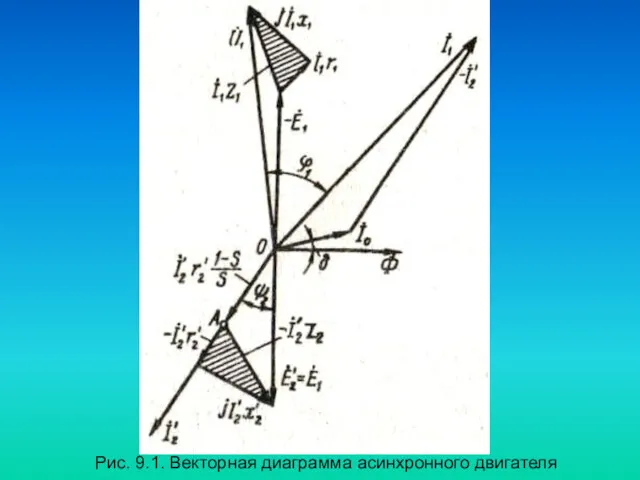
Рис. 9.1. Векторная диаграмма асинхронного двигателя
Рис. 9.1. Векторная диаграмма асинхронного двигателя
На рис. 9.1 представлена векторная диаграмма асинхронного двигателя. От векторной диаграммы
На рис. 9.1 представлена векторная диаграмма асинхронного двигателя. От векторной диаграммы
Однако если падение напряжения
рассматривать как напряжение на некоторой
Однако если падение напряжения
рассматривать как напряжение на некоторой
Иначе говоря, асинхронный двигатель в электрическом отношении подобен трансформатору, работающему на
Иначе говоря, асинхронный двигатель в электрическом отношении подобен трансформатору, работающему на
9.3. Схема замещения асинхронного двигателя
Уравнениям напряжений и токов, а также векторной
9.3. Схема замещения асинхронного двигателя
Уравнениям напряжений и токов, а также векторной
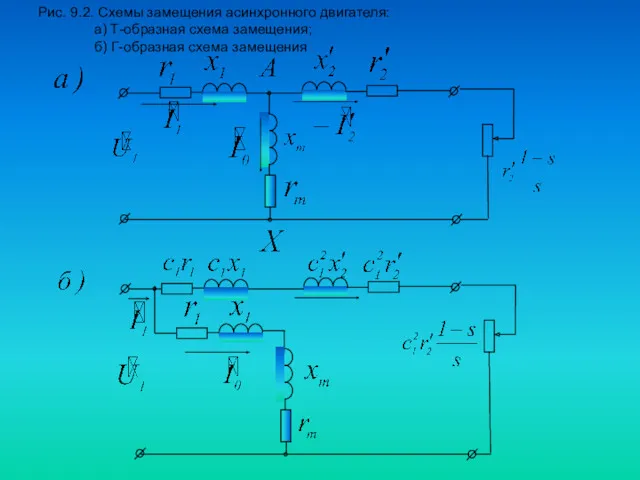
На рис. 3.5, а представлена Т-образная схема замещения.
Рис. 3.5. Схемы замещения
На рис. 3.5, а представлена Т-образная схема замещения.
Рис. 3.5. Схемы замещения
Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме
Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме
Сопротивление
— единственный переменный параметр схемы. Значение этого сопротивления определяется
Сопротивление
— единственный переменный параметр схемы. Значение этого сопротивления определяется
Если же нагрузочный момент на валу двигателя превышает его вращающий момент,
Если же нагрузочный момент на валу двигателя превышает его вращающий момент,
Чтобы при этом намагничивающий ток I0 не изменил своего значения, в
Чтобы при этом намагничивающий ток I0 не изменил своего значения, в
Расчет параметров рабочего контура Г-образной схемы замещения требует уточнения, что достигается
Расчет параметров рабочего контура Г-образной схемы замещения требует уточнения, что достигается
Так как в этом режиме ток холостого хода асинхронного двигателя весьма
Так как в этом режиме ток холостого хода асинхронного двигателя весьма
Возникшие при этом неточности не превысят значений, допустимых при технических расчетах.
Возникшие при этом неточности не превысят значений, допустимых при технических расчетах.
 Христианская семья
Христианская семья Инновации в мире технологий
Инновации в мире технологий Повышение эффективности технического обеспечения молочно-товарного Комплекса в СПК Гожа Гродненского района
Повышение эффективности технического обеспечения молочно-товарного Комплекса в СПК Гожа Гродненского района Аксиомы стереометрии и их следствия
Аксиомы стереометрии и их следствия Великдень. Куличи на Пасху
Великдень. Куличи на Пасху Карамель. Формування споживних властивостей карамелі. Класифікація і формування асортименту карамелі
Карамель. Формування споживних властивостей карамелі. Класифікація і формування асортименту карамелі Система менеджмента безопасности движения
Система менеджмента безопасности движения Основы VBA. Арифметические операторы VBA
Основы VBA. Арифметические операторы VBA Лидеры и элиты в политической жизни
Лидеры и элиты в политической жизни Мейоз. Механизм мейоза
Мейоз. Механизм мейоза Irregular Verbs
Irregular Verbs Правила обращения за региональной социальной доплатой к пенсии, порядок ее установления, выплаты и пересмотра ее размера
Правила обращения за региональной социальной доплатой к пенсии, порядок ее установления, выплаты и пересмотра ее размера Дробные выражения. Устный счет
Дробные выражения. Устный счет Эпидемиология и профилактика сибирской язвы
Эпидемиология и профилактика сибирской язвы Биологическое и социальное в структуре личности
Биологическое и социальное в структуре личности Ударение
Ударение Презентация по творчеству С.Есенина
Презентация по творчеству С.Есенина Презентация для детей Новокуйбышевск - мой родной город
Презентация для детей Новокуйбышевск - мой родной город Неделя профилактики употребления алкоголя. Классный час в 5-Н классе – Альтернатива вредным привычкам
Неделя профилактики употребления алкоголя. Классный час в 5-Н классе – Альтернатива вредным привычкам Охранно - пожарная сигнализация. Виды сигнализаций
Охранно - пожарная сигнализация. Виды сигнализаций Технология изготовления металлического мангала
Технология изготовления металлического мангала Ми ісіктері мен инфекциялары кезіндегі психикалық бұзылыстар
Ми ісіктері мен инфекциялары кезіндегі психикалық бұзылыстар День матери
День матери Государственная идеология как социально-политический феномен
Государственная идеология как социально-политический феномен Компьютер – помощник и друг
Компьютер – помощник и друг активированный уголь
активированный уголь Прорастание семян
Прорастание семян Приёмные антенны и их параметры. Лекция № 7. АФУ
Приёмные антенны и их параметры. Лекция № 7. АФУ