- Processes and interactions

Содержание
- 2. Processes A process is the activity of executing a program on a CPU. Conceptually… Each process
- 3. Why Processes? Hardware-independent solutions Processes cooperate and compete correctly, regardless of the number of CPUs Structuring
- 4. How to define/create Processes? Need to: Define what each process does (the program) Create the processes
- 5. Specifying precedence relations A general approach: Process flow graphs Directed acyclic graphs (DAGs) Edges = processes
- 6. Process flow graphs Example: parallel evaluation of arithmetic expression: (a + b) * (c + d)
- 7. Other examples of Precedence Relationships Operating Systems Process flow graphs
- 8. Process flow graphs (PFG) Challenge: devise programming language constructs to capture PFG Special case: Properly Nested
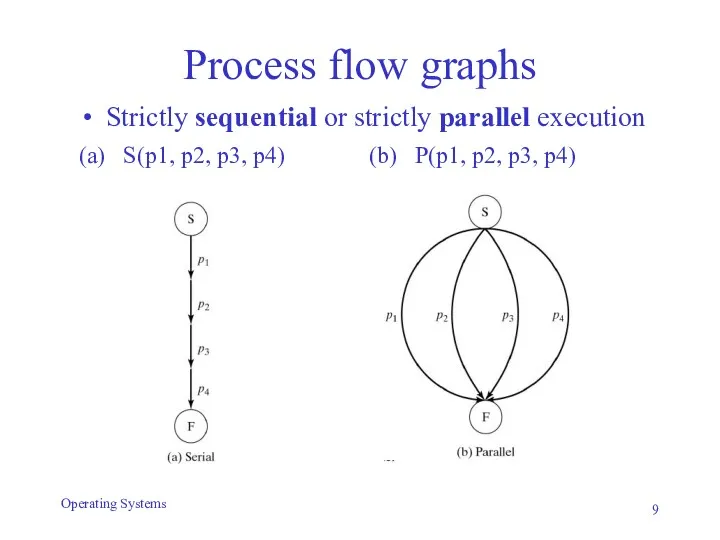
- 9. Process flow graphs Operating Systems (a) S(p1, p2, p3, p4) (b) P(p1, p2, p3, p4) Strictly
- 10. Process flow graphs (c) corresponds to the properly nested expression: S(p1, P(p2, S(p3, P(p4, p5)), p6),
- 11. Language Constructs for Process Creation to capture properly nested graphs cobegin // coend forall statement to
- 12. cobegin/coend statements syntax: cobegin C1 // C2 // … // Cn coend meaning: all Ci may
- 13. cobegin/coend example Operating Systems cobegin Time_Date // Mail // { Edit; cobegin { Compile; Load; Execute}
- 14. Data parallelism Same code is applied to different data The forall statement syntax: forall (parameters) statements
- 15. Example of forall statement Example: Matrix Multiply A=B*C forall ( i:1..n, j:1..m ) { A[i][j] =
- 16. fork/join/quit cobegin/coend limited to properly nested graphs forall limited to data parallelism fork/join/quit can express arbitrary
- 17. fork/join/quit Syntax: fork x Meaning: create new process that begins executing at label x Syntax: join
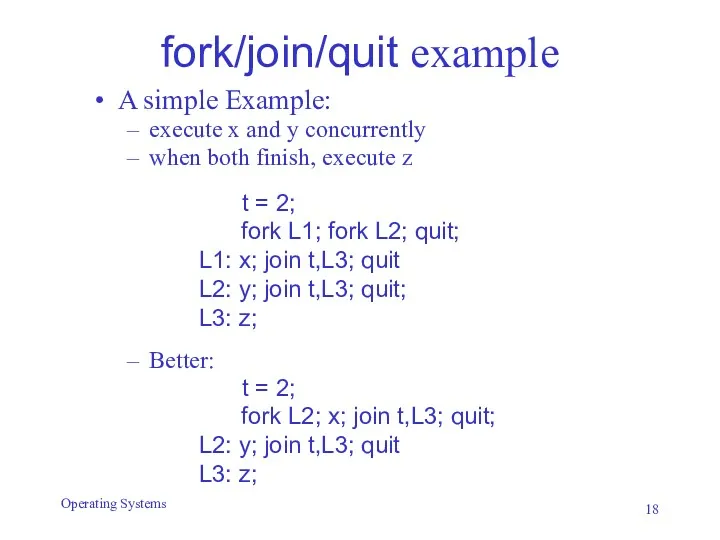
- 18. fork/join/quit example A simple Example: execute x and y concurrently when both finish, execute z t
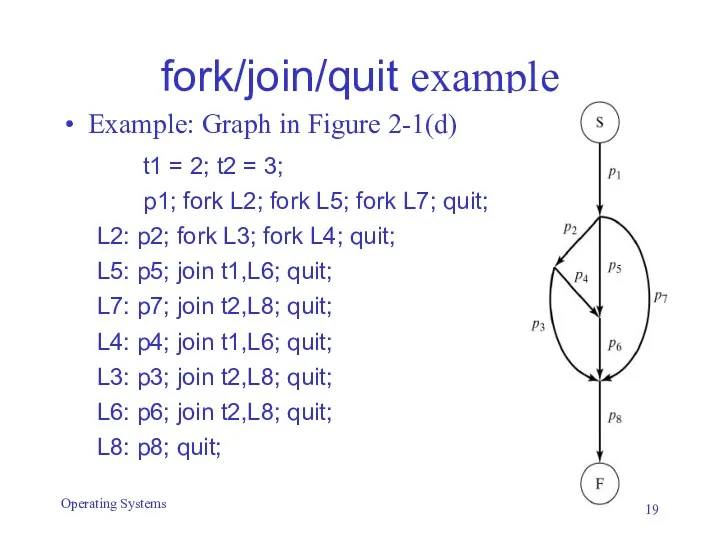
- 19. fork/join/quit example Example: Graph in Figure 2-1(d) t1 = 2; t2 = 3; p1; fork L2;
- 20. Example: the Unix fork statement procid = fork() Replicates calling process Parent and child are identical
- 21. Explicit Process Declarations Designate piece of code as a unit of execution Facilitates program structuring Instantiate:
- 22. Explicit Process Declarations process p process p1 declarations_for_p1 begin ... end process type p2 declarations_for_p2 begin
- 23. Process Interactions Competition Two processes both want to access the same resource Example: write the same
- 24. Process Interactions Competition: The Critical Section Problem x = 0; cobegin p1: … x = x
- 25. The Critical Section Problem Interleaved execution (due to parallel processing or context switching) p1: R1 =
- 26. The Critical Section Problem General problem statement: cobegin p1: while(1) {CS1; program1;} // p2: while(1) {CS2;
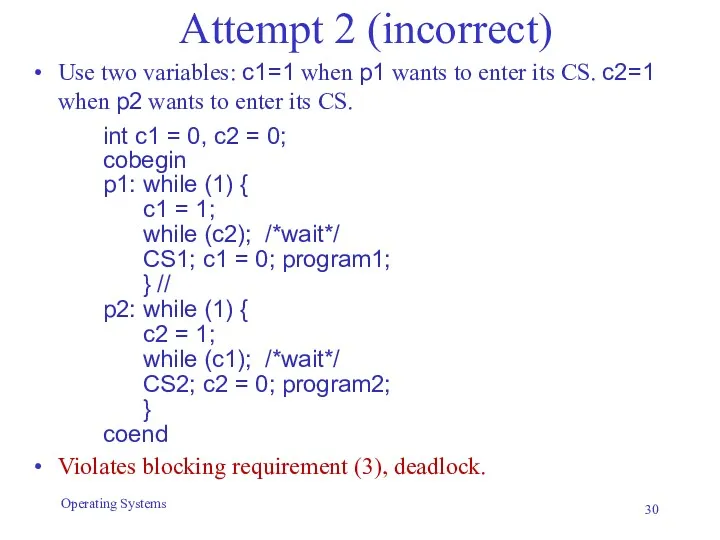
- 27. The Critical Section Problem In addition to mutual exclusion, must also prevent mutual blocking: 1. Process
- 28. The Critical Section Problem Solving the problem is subtle We will examine a few incorrect solutions
- 29. Attempt 1 (incorrect) Use a single turn variable: int turn = 1; cobegin p1: while (1)
- 30. Attempt 2 (incorrect) Use two variables: c1=1 when p1 wants to enter its CS. c2=1 when
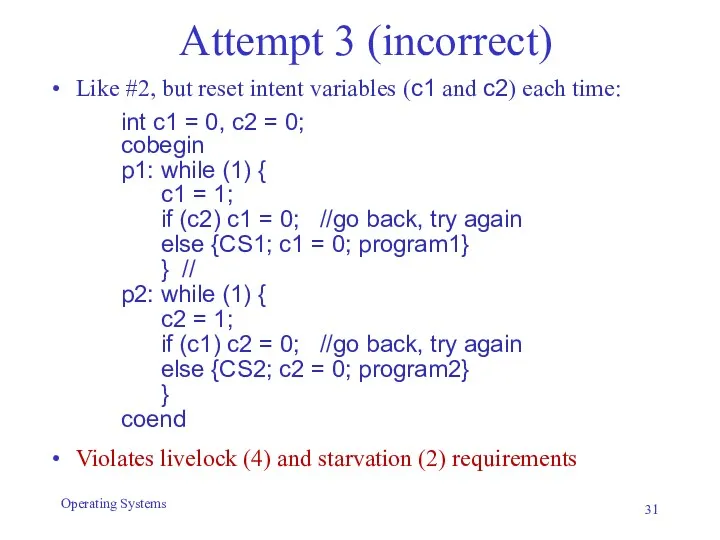
- 31. Attempt 3 (incorrect) Like #2, but reset intent variables (c1 and c2) each time: int c1
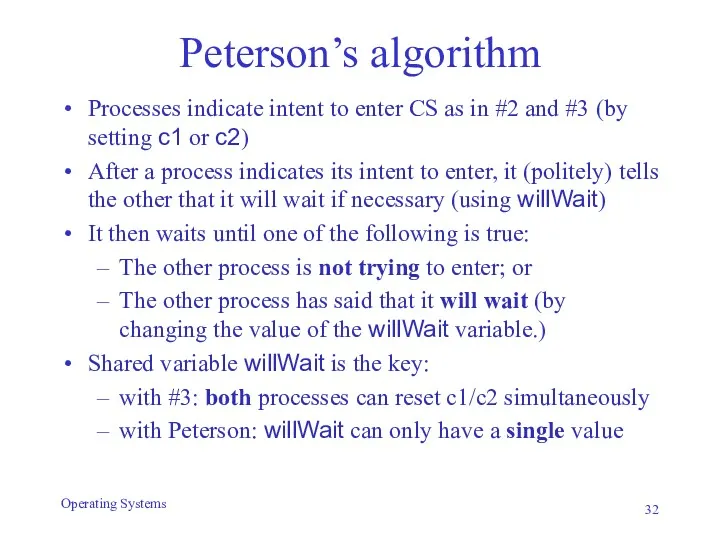
- 32. Peterson’s algorithm Processes indicate intent to enter CS as in #2 and #3 (by setting c1
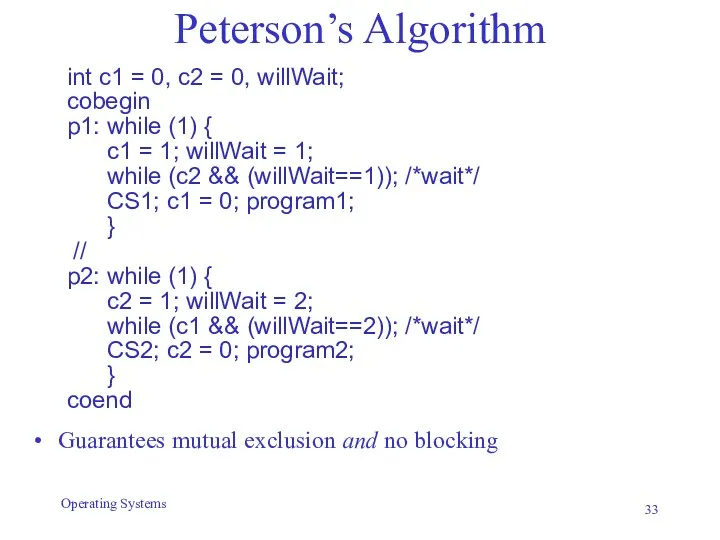
- 33. Peterson’s Algorithm int c1 = 0, c2 = 0, willWait; cobegin p1: while (1) { c1
- 34. Another algorithm for the critical section problem: the Bakery Algorithm Based on “taking a number” as
- 35. Code for Bakery Algorithm int number[n]; //shared array. All entries initially set to 0 //Code for
- 36. Software solutions to CS problem Drawbacks Difficult to program and to verify Processes loop while waiting
- 37. Semaphores A semaphore s is a nonnegative integer Operations P and V are defined on s
- 38. Notes on semaphores Developed by Edsger Dijkstra http://en.wikipedia.org/wiki/Edsger_W._Dijkstra Etymology: P(s): “P” from “passaren” (“pass” in Dutch)
- 39. Mutual Exclusion w/ Semaphores Assume we have P/V as defined previously semaphore mutex = 1; cobegin
- 40. Cooperation Semaphores can also solve cooperation problems Example: assume that p1 must wait for a signal
- 41. Bounded Buffer Problem Classic generic scenario: Producer → Buffer → Consumer Produce and consumer run concurrently
- 42. Bounded Buffer Problem semaphore e = n, f = 0, b = 1; cobegin Producer: while
- 43. Events An event designates a change in the system state that is of interest to a
- 44. Synchronous Events Process explicitly waits for occurrence of a specific event or set of events generated
- 45. Asynchronous Events Must also be defined, posted Process does not explicitly wait Process provides event handlers
- 46. Event synchronization in UNIX Processes can signal conditions using asynchronous events: kill(pid, signal) Possible signals: SIGHUP,
- 48. Скачать презентацию
Processes
A process is the activity of executing a program on a
Processes
A process is the activity of executing a program on a
Why Processes?
Hardware-independent solutions
Processes cooperate and compete correctly, regardless of the number
Why Processes?
Hardware-independent solutions
Processes cooperate and compete correctly, regardless of the number
How to define/create Processes?
Need to:
Define what each process does (the program)
Create
How to define/create Processes?
Need to:
Define what each process does (the program)
Create
Specifying precedence relations
A general approach: Process flow graphs
Directed acyclic graphs
Specifying precedence relations
A general approach: Process flow graphs
Directed acyclic graphs
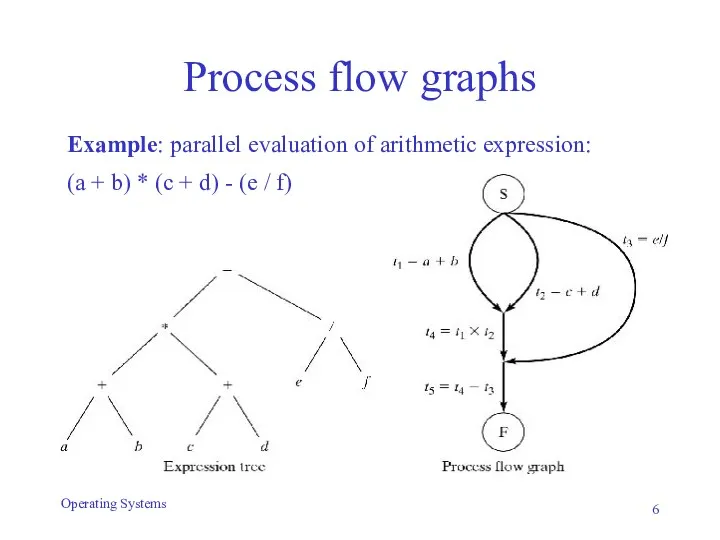
Process flow graphs
Example: parallel evaluation of arithmetic expression:
(a + b) *
Process flow graphs
Example: parallel evaluation of arithmetic expression:
(a + b) *
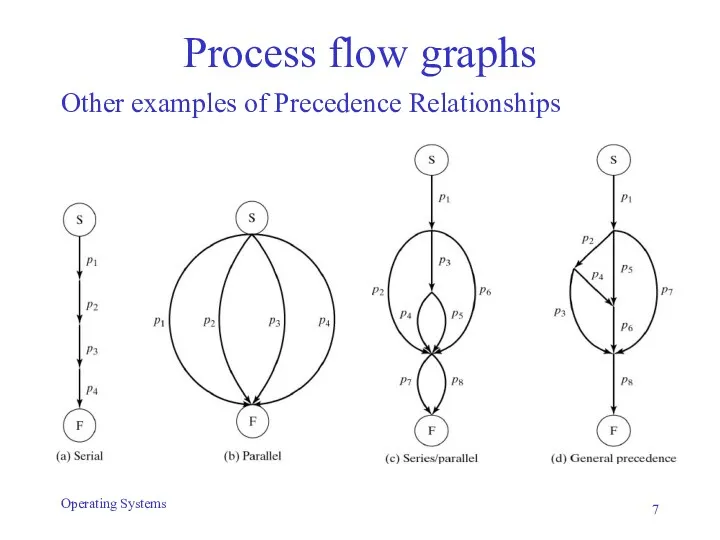
Other examples of Precedence Relationships
Operating Systems
Process flow graphs
Other examples of Precedence Relationships
Operating Systems
Process flow graphs
Process flow graphs (PFG)
Challenge: devise programming language constructs to capture PFG
Special
Process flow graphs (PFG)
Challenge: devise programming language constructs to capture PFG
Special
Process flow graphs
Operating Systems
(a) S(p1, p2, p3, p4) (b) P(p1,
Process flow graphs
Operating Systems
(a) S(p1, p2, p3, p4) (b) P(p1,
Process flow graphs
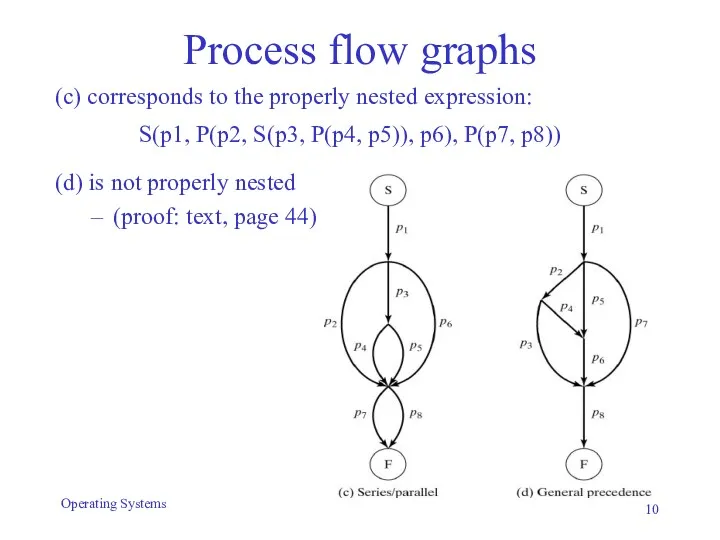
(c) corresponds to the properly nested expression:
S(p1,
Process flow graphs
(c) corresponds to the properly nested expression:
S(p1,
Language Constructs for
Process Creation
to capture properly nested graphs
cobegin // coend
Language Constructs for
Process Creation
to capture properly nested graphs
cobegin // coend
cobegin/coend statements
syntax: cobegin C1 // C2 // … // Cn coend
meaning:
cobegin/coend statements
syntax: cobegin C1 // C2 // … // Cn coend
meaning:
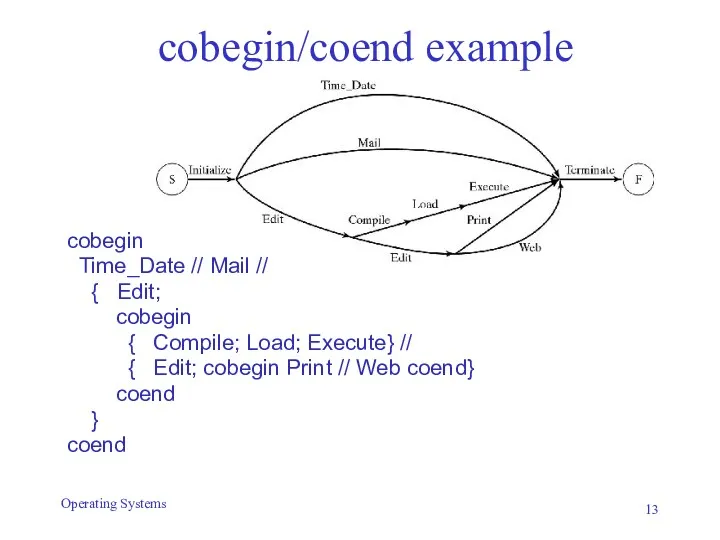
cobegin/coend example
Operating Systems
cobegin
Time_Date // Mail //
{ Edit;
cobegin
cobegin/coend example
Operating Systems
cobegin
Time_Date // Mail //
{ Edit;
cobegin
Data parallelism
Same code is applied to different data
The forall statement
syntax: forall
Data parallelism
Same code is applied to different data
The forall statement
syntax: forall
Example of forall statement
Example: Matrix Multiply A=B*C
forall ( i:1..n, j:1..m )
Example of forall statement
Example: Matrix Multiply A=B*C
forall ( i:1..n, j:1..m )
fork/join/quit
cobegin/coend
limited to properly nested graphs
forall
limited to data parallelism
fork/join/quit
can
fork/join/quit
cobegin/coend
limited to properly nested graphs
forall
limited to data parallelism
fork/join/quit
can
fork/join/quit
Syntax: fork x
Meaning: create new process that begins executing at label
fork/join/quit
Syntax: fork x
Meaning: create new process that begins executing at label
fork/join/quit example
A simple Example:
execute x and y concurrently
when both finish,
fork/join/quit example
A simple Example:
execute x and y concurrently
when both finish,
fork/join/quit example
Example: Graph in Figure 2-1(d)
t1 = 2; t2 =
fork/join/quit example
Example: Graph in Figure 2-1(d)
t1 = 2; t2 =
Example: the Unix fork statement
procid = fork()
Replicates calling process
Parent and child
Example: the Unix fork statement
procid = fork()
Replicates calling process
Parent and child
Explicit Process Declarations
Designate piece of code as a unit of execution
Explicit Process Declarations
Designate piece of code as a unit of execution
Explicit Process Declarations
process p
process p1
declarations_for_p1
begin ...
Explicit Process Declarations
process p
process p1
declarations_for_p1
begin ...
Process Interactions
Competition
Two processes both want to access the same resource
Example: write
Process Interactions
Competition
Two processes both want to access the same resource
Example: write
Process Interactions
Competition: The Critical Section Problem
x = 0;
cobegin
p1: …
x
Process Interactions
Competition: The Critical Section Problem
x = 0;
cobegin
p1: …
x
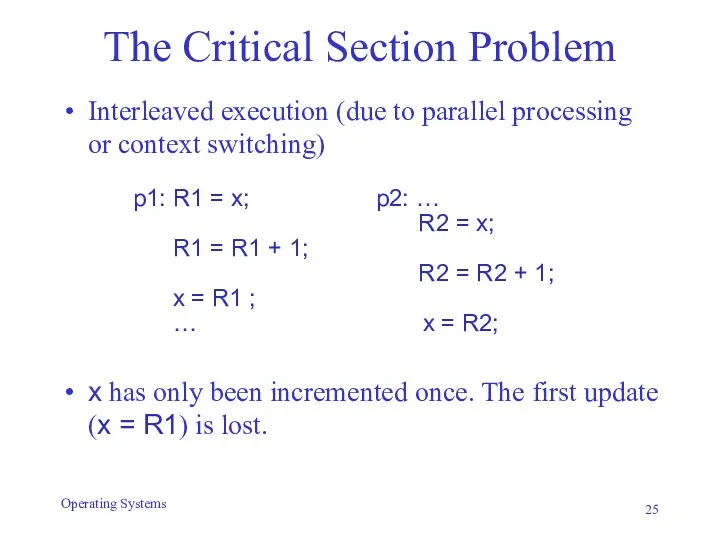
The Critical Section Problem
Interleaved execution (due to parallel processing or context
The Critical Section Problem
Interleaved execution (due to parallel processing or context
The Critical Section Problem
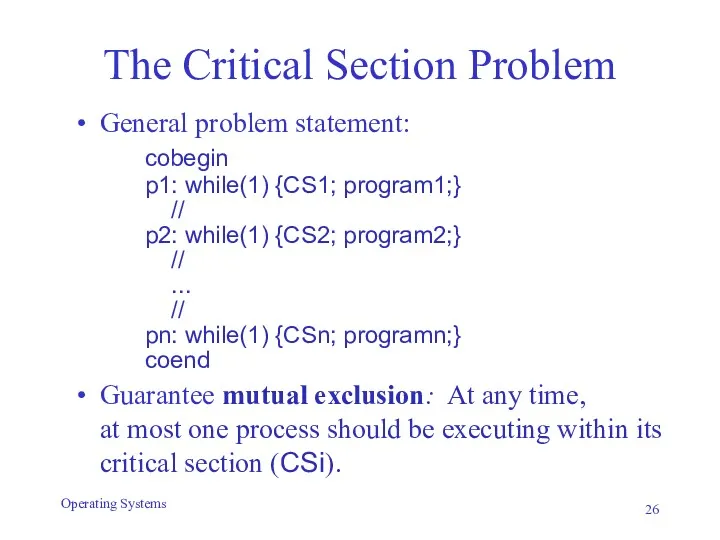
General problem statement:
cobegin
p1: while(1) {CS1; program1;}
The Critical Section Problem
General problem statement:
cobegin
p1: while(1) {CS1; program1;}
The Critical Section Problem
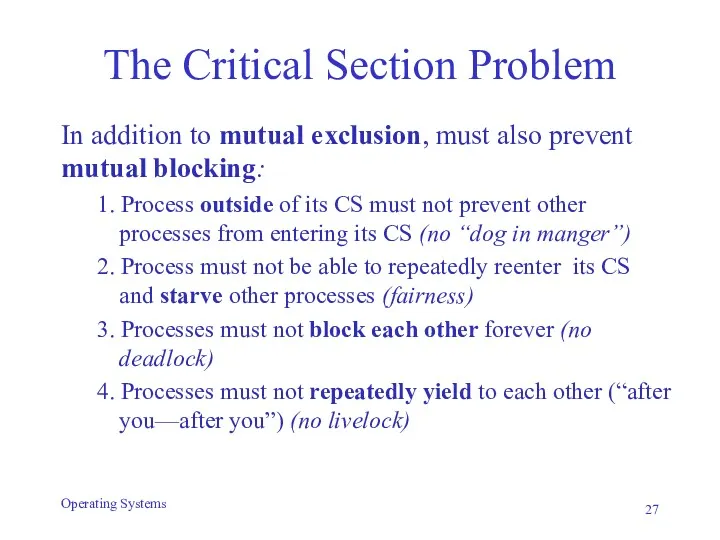
In addition to mutual exclusion, must also prevent
The Critical Section Problem
In addition to mutual exclusion, must also prevent
The Critical Section Problem
Solving the problem is subtle
We will examine a
The Critical Section Problem
Solving the problem is subtle
We will examine a
Attempt 1 (incorrect)
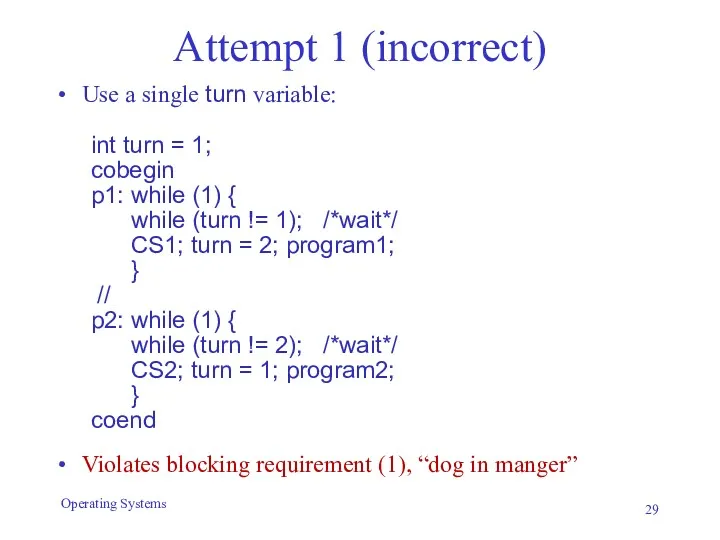
Use a single turn variable:
int turn = 1;
cobegin
p1:
Attempt 1 (incorrect)
Use a single turn variable:
int turn = 1;
cobegin
p1:
Attempt 2 (incorrect)
Use two variables: c1=1 when p1 wants to enter
Attempt 2 (incorrect)
Use two variables: c1=1 when p1 wants to enter
Attempt 3 (incorrect)
Like #2, but reset intent variables (c1 and c2)
Attempt 3 (incorrect)
Like #2, but reset intent variables (c1 and c2)
Peterson’s algorithm
Processes indicate intent to enter CS as in #2 and
Peterson’s algorithm
Processes indicate intent to enter CS as in #2 and
Peterson’s Algorithm
int c1 = 0, c2 = 0, willWait;
cobegin
p1: while (1)
Peterson’s Algorithm
int c1 = 0, c2 = 0, willWait;
cobegin
p1: while (1)
Another algorithm for the critical section problem: the Bakery Algorithm
Based on
Another algorithm for the critical section problem: the Bakery Algorithm
Based on
![Code for Bakery Algorithm int number[n]; //shared array. All entries](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/252255/slide-34.jpg)
Code for Bakery Algorithm
int number[n]; //shared array. All entries initially
Code for Bakery Algorithm
int number[n]; //shared array. All entries initially
Software solutions to CS problem
Drawbacks
Difficult to program and to verify
Processes loop
Software solutions to CS problem
Drawbacks
Difficult to program and to verify
Processes loop
Semaphores
A semaphore s is a nonnegative integer
Operations P and V
Semaphores
A semaphore s is a nonnegative integer
Operations P and V
Notes on semaphores
Developed by Edsger Dijkstra
http://en.wikipedia.org/wiki/Edsger_W._Dijkstra
Etymology:
P(s):
“P” from “passaren” (“pass” in Dutch)
Notes on semaphores
Developed by Edsger Dijkstra
http://en.wikipedia.org/wiki/Edsger_W._Dijkstra
Etymology:
P(s):
“P” from “passaren” (“pass” in Dutch)
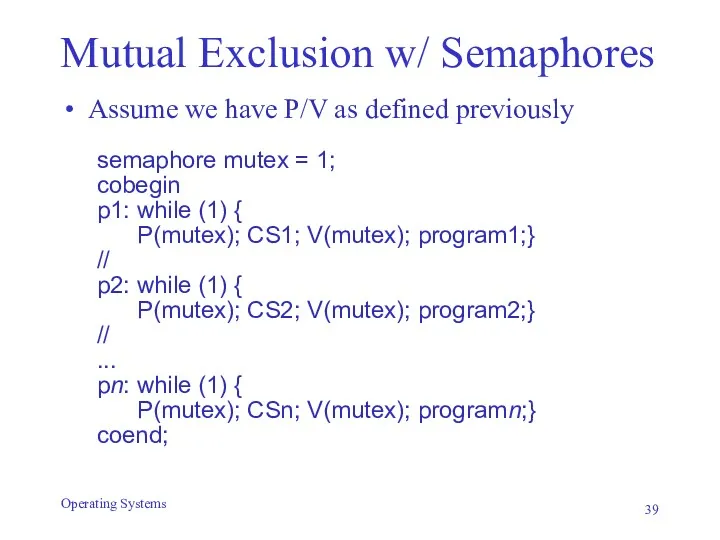
Mutual Exclusion w/ Semaphores
Assume we have P/V as defined previously
semaphore mutex
Mutual Exclusion w/ Semaphores
Assume we have P/V as defined previously
semaphore mutex
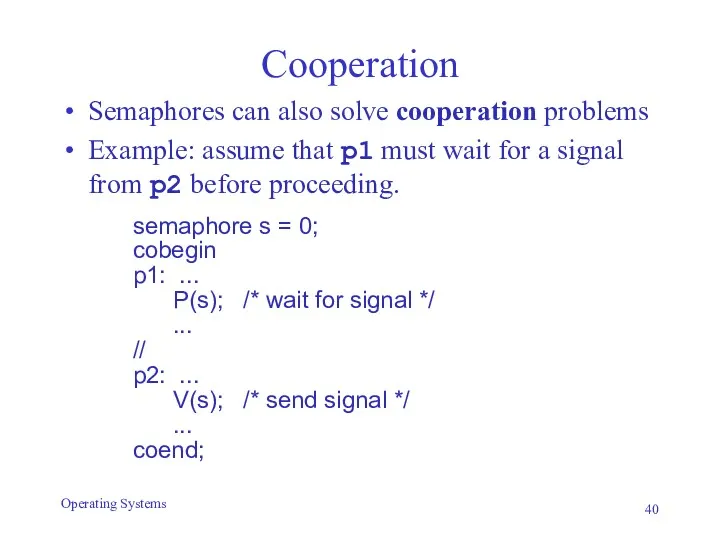
Cooperation
Semaphores can also solve cooperation problems
Example: assume that p1 must wait
Cooperation
Semaphores can also solve cooperation problems
Example: assume that p1 must wait
Bounded Buffer Problem
Classic generic scenario:
Producer → Buffer → Consumer
Bounded Buffer Problem
Classic generic scenario:
Producer → Buffer → Consumer
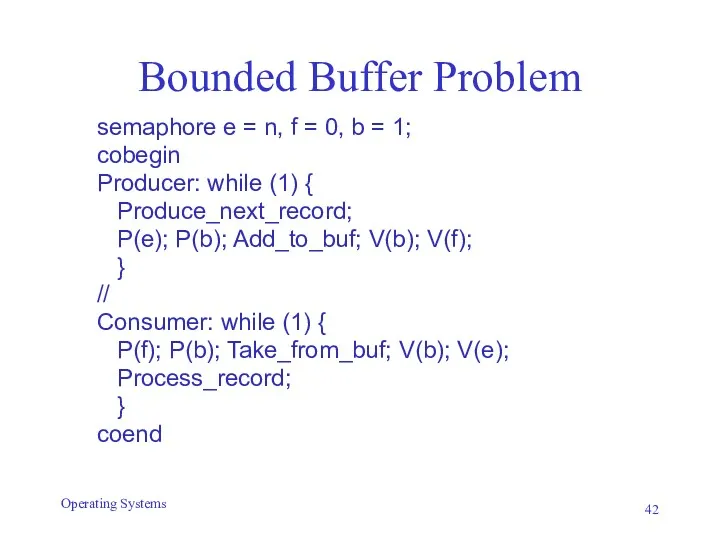
Bounded Buffer Problem
semaphore e = n, f = 0, b =
Bounded Buffer Problem
semaphore e = n, f = 0, b =
Events
An event designates a change in the system state that is
Events
An event designates a change in the system state that is
Synchronous Events
Process explicitly waits for occurrence of a specific event or
Synchronous Events
Process explicitly waits for occurrence of a specific event or
Asynchronous Events
Must also be defined, posted
Process does not explicitly wait
Process provides
Asynchronous Events
Must also be defined, posted
Process does not explicitly wait
Process provides
Event synchronization in UNIX
Processes can signal conditions using asynchronous events:
kill(pid,
Event synchronization in UNIX
Processes can signal conditions using asynchronous events:
kill(pid,
 Презентация Имя Д.И.Менделеева в геграфических названиях
Презентация Имя Д.И.Менделеева в геграфических названиях Мамин праздник
Мамин праздник Проектно-исследовательская работа Этапы битвы за Сталинград
Проектно-исследовательская работа Этапы битвы за Сталинград Краудфандинг
Краудфандинг Опытная эксплуатация смешанной топливной загрузки активной зоны ТВСА совместно с ТВС-WR на ЮУ АЭС
Опытная эксплуатация смешанной топливной загрузки активной зоны ТВСА совместно с ТВС-WR на ЮУ АЭС Invata sa te comporti civilizat
Invata sa te comporti civilizat First Conditional. Условное предложение 1 типа. Тест
First Conditional. Условное предложение 1 типа. Тест Стресс в профессиональной деятельности: причины и методы преодоления
Стресс в профессиональной деятельности: причины и методы преодоления Мұнай бергіштікті арттыру үшін қабатқа ыстық бу айдау
Мұнай бергіштікті арттыру үшін қабатқа ыстық бу айдау Презентация к устному журналу Это страшное слово - БЛОКАДА
Презентация к устному журналу Это страшное слово - БЛОКАДА Традиции, обряды, нормы буддизма
Традиции, обряды, нормы буддизма Пермский край-лесной край.
Пермский край-лесной край. 9 класс. Западно-Сибирский район
9 класс. Западно-Сибирский район Материалы и оборудование для капиллярного контроля сварных соединений. Капиллярный метод неразрушающего контроля
Материалы и оборудование для капиллярного контроля сварных соединений. Капиллярный метод неразрушающего контроля Предметно-развивающая среда ДОУ Особенности организации предметно-развивающей среды в разных возрастных группах
Предметно-развивающая среда ДОУ Особенности организации предметно-развивающей среды в разных возрастных группах Фермы. Классификация
Фермы. Классификация Государственный строй и устройство стран мира.
Государственный строй и устройство стран мира. урок технологии Лесные жители
урок технологии Лесные жители SecurityBand Kvirin KPDA
SecurityBand Kvirin KPDA Chiny – najludniejszy kraj świata
Chiny – najludniejszy kraj świata Общие сведения о каналах утечки информации, обрабатываемой ТСПИ, через ПЭМИН
Общие сведения о каналах утечки информации, обрабатываемой ТСПИ, через ПЭМИН Праздничные концерты для любимых женщин. Фотоальбом
Праздничные концерты для любимых женщин. Фотоальбом По пути Христа
По пути Христа ПРЕЗЕНТАЦИЯ Самообразование педагогов в ДОУ
ПРЕЗЕНТАЦИЯ Самообразование педагогов в ДОУ Оценка и аттестация персонала. Высвобождение персонала. Тема 5
Оценка и аттестация персонала. Высвобождение персонала. Тема 5 20231227_apk
20231227_apk Развитие коммуникативных умений и навыков у учащихся
Развитие коммуникативных умений и навыков у учащихся Процессы и аппараты процессов нефтегазопереработки и нефтехимии
Процессы и аппараты процессов нефтегазопереработки и нефтехимии