- Проектирование удаленного доступа на автономных объектах

Содержание
- 2. Цель и задачи Цель: спроектировать систему удаленного доступа к видеонаблюдению на автономных подвижных объектах. Задачи проекта:
- 3. Морское автономное надводное судно (МАНС) МАНС – морское автономное надводное судно. Оно оснащается системой автоматического управления,
- 4. Внедрение системы видеонаблюдения в МАНС Данная система должна будет максимально облегчить управление судном. С помощью картинки,
- 5. Проектирование модели Размеры макета судна: длина – 210 см; ширина – 26 см высота (ходовой мостик–киль)
- 6. Проектирование модели Для создания модели были взяты следующие элементы: .
- 7. Таблица технических характеристик элементов
- 8. Электрическая схема передатчика Контроллер Arduino Uno Двухосевой джойстик (KY-023, PS2) Модуль зарядки TP4056-Protect Передатчик FS1000A
- 9. Электрическая схема приёмника Контроллер Arduino Uno Гироскоп-акселерометр GY-521 MPU-6050 Сервоприводы JX PDI-6221MG Приемник MX-RM-5V
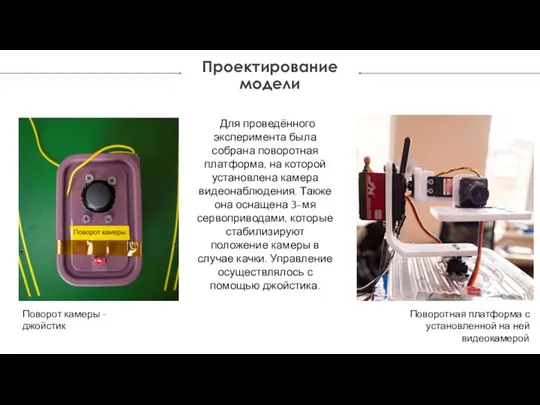
- 10. Проектирование модели Для проведённого эксперимента была собрана поворотная платформа, на которой установлена камера видеонаблюдения. Также она
- 11. Задачи: Дистанционное управление поворотной платформой с помощью джойстика. Получение видеоряда с камеры. Определение дальности передачи. Проверка
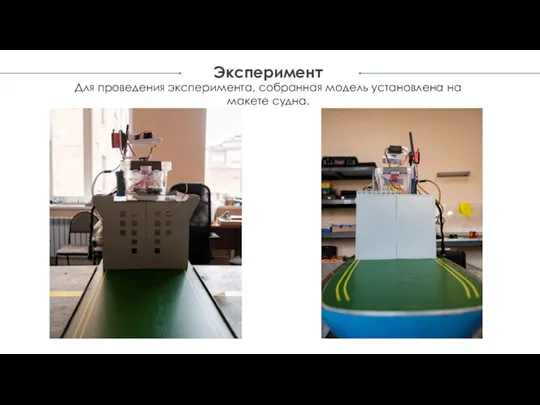
- 12. Эксперимент Для проведения эксперимента, собранная модель установлена на макете судна.
- 14. Скачать презентацию

Цель и задачи
Цель: спроектировать систему удаленного доступа к видеонаблюдению на автономных
Цель и задачи
Цель: спроектировать систему удаленного доступа к видеонаблюдению на автономных

Морское автономное
надводное судно
(МАНС)
МАНС – морское автономное надводное судно. Оно оснащается системой
Морское автономное
надводное судно
(МАНС)
МАНС – морское автономное надводное судно. Оно оснащается системой

Внедрение системы
видеонаблюдения в МАНС
Данная система должна будет максимально облегчить
Внедрение системы
видеонаблюдения в МАНС
Данная система должна будет максимально облегчить

Проектирование
модели
Размеры макета судна: длина – 210 см; ширина – 26 см
Проектирование
модели
Размеры макета судна: длина – 210 см; ширина – 26 см

Проектирование
модели
Для создания модели были взяты следующие элементы:
.
Проектирование
модели
Для создания модели были взяты следующие элементы:
.

Таблица технических характеристик элементов
Таблица технических характеристик элементов

Электрическая схема передатчика
Контроллер Arduino Uno
Двухосевой джойстик (KY-023, PS2)
Модуль зарядки TP4056-Protect
Передатчик
Электрическая схема передатчика
Контроллер Arduino Uno
Двухосевой джойстик (KY-023, PS2)
Модуль зарядки TP4056-Protect
Передатчик
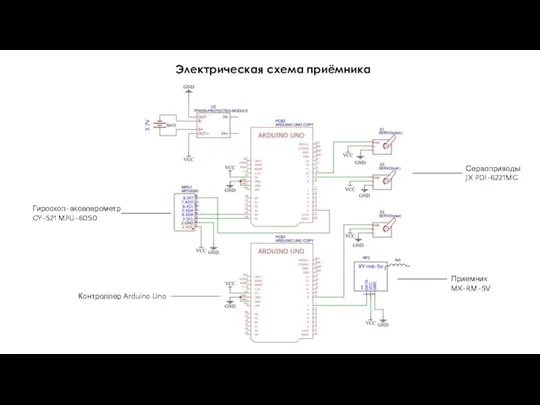
Электрическая схема приёмника
Контроллер Arduino Uno
Гироскоп-акселерометр GY-521 MPU-6050
Сервоприводы JX PDI-6221MG
Приемник MX-RM-5V
Электрическая схема приёмника
Контроллер Arduino Uno
Гироскоп-акселерометр GY-521 MPU-6050
Сервоприводы JX PDI-6221MG
Приемник MX-RM-5V
Проектирование
модели
Для проведённого эксперимента была собрана поворотная платформа, на которой установлена
Проектирование
модели
Для проведённого эксперимента была собрана поворотная платформа, на которой установлена

Задачи:
Дистанционное управление поворотной платформой с помощью джойстика.
Получение видеоряда с камеры.
Определение дальности
Задачи:
Дистанционное управление поворотной платформой с помощью джойстика.
Получение видеоряда с камеры.
Определение дальности
Эксперимент
Для проведения эксперимента, собранная модель установлена на макете судна.
Эксперимент
Для проведения эксперимента, собранная модель установлена на макете судна.
 Организация внеурочной деятельности при введении ФГОС
Организация внеурочной деятельности при введении ФГОС Физическое насилие, факторы риска, признаки
Физическое насилие, факторы риска, признаки Как стать успешной
Как стать успешной Комплекты в белом цвете: Духовые шкафы/Микроволновые печи/Вытяжки/Варочные панели
Комплекты в белом цвете: Духовые шкафы/Микроволновые печи/Вытяжки/Варочные панели Презентация Рельеф дна Мирового океана 6 класс
Презентация Рельеф дна Мирового океана 6 класс Праздники в религиях мира
Праздники в религиях мира Презентация к открытому уроку по ПМ 02 Участие в лечебно-диагностическом и реабилитационном процессах МДК 02.01 Сестринская помощь при нарушениях здоровья. Инфекционные болезни с курсом ВИЧ-инфекции и эпидемиологии Тема &quot
Презентация к открытому уроку по ПМ 02 Участие в лечебно-диагностическом и реабилитационном процессах МДК 02.01 Сестринская помощь при нарушениях здоровья. Инфекционные болезни с курсом ВИЧ-инфекции и эпидемиологии Тема &quot Формирование анализа и синтеза в игровой форме
Формирование анализа и синтеза в игровой форме Санкт-Петербург - вторая столица России
Санкт-Петербург - вторая столица России Трапеция. Свойства трапеции
Трапеция. Свойства трапеции Пирамида
Пирамида Электронная презентация Из глубины веков
Электронная презентация Из глубины веков Духовно-нравственное воспитание личности учащихся на занятиях декоративно-прикладного творчества в рамках изучения темы:Русские народные куклы
Духовно-нравственное воспитание личности учащихся на занятиях декоративно-прикладного творчества в рамках изучения темы:Русские народные куклы Библиографическое описание
Библиографическое описание Спасибо деду за Победу!!!
Спасибо деду за Победу!!! Сестринский процесс при хроническом энтероколите
Сестринский процесс при хроническом энтероколите Деятельностный подход в психологии игры.
Деятельностный подход в психологии игры. Вечный огонь
Вечный огонь Методика разработки учебных программ по математике
Методика разработки учебных программ по математике Авиационные машины постоянного тока (генераторы)
Авиационные машины постоянного тока (генераторы) Дифференциация Ж - Ш
Дифференциация Ж - Ш Международный финансовый бизнес. Сегментация мирового финансового рынка и основных инструментов для проведения валютных операций
Международный финансовый бизнес. Сегментация мирового финансового рынка и основных инструментов для проведения валютных операций Презентация 1 сентября
Презентация 1 сентября Презентация к уроку географии 8 класс Почвы России.
Презентация к уроку географии 8 класс Почвы России. Литературная викторина
Литературная викторина 20190601_temat._trening_zad.1
20190601_temat._trening_zad.1 Проект Ой вы, птицы, к нам летите, весну красную несите!
Проект Ой вы, птицы, к нам летите, весну красную несите! Презентация Упражнения на релаксацию
Презентация Упражнения на релаксацию