- Пропорционально-дифференциальное регулирование в среде LEGO Mindstorms Education EV3

Содержание
- 2. Принцип пропорционального регулирования применим во многох областях применения робота: движение по линии, движение вдоль стенки, движение
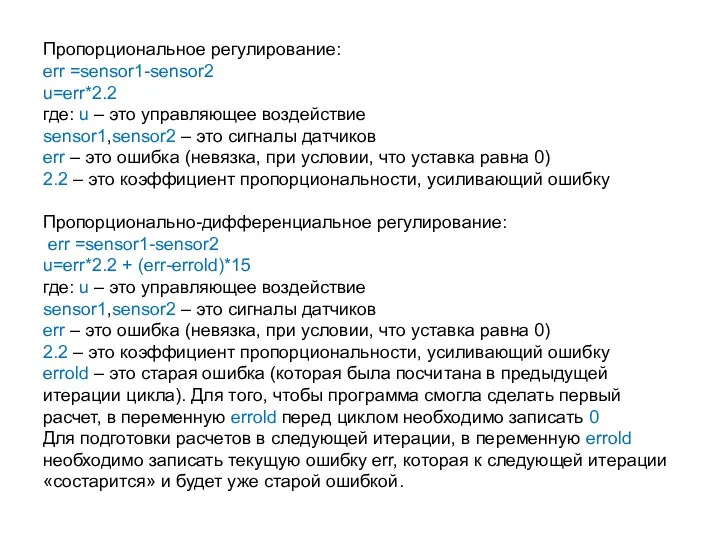
- 3. Пропорциональное регулирование: err =sensor1-sensor2 u=err*2.2 где: u – это управляющее воздействие sensor1,sensor2 – это сигналы датчиков
- 4. Lego EV3, датчики света подключены к портам 1 и 2. Модель робота – 2D модель Для
- 5. А это - блок диаграмм для робота с двумя датчиками освещенности, написанная на основе принципа пропорционального
- 6. Отладка робота в Trik Studio Для отладки робота используем виртуального робота на основе двухмоторной тележки и
- 8. Скачать презентацию
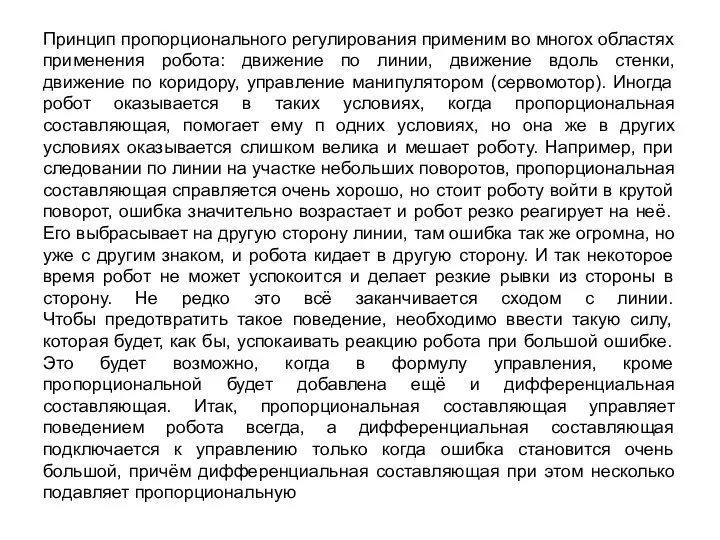
Принцип пропорционального регулирования применим во многох областях применения робота: движение по
Принцип пропорционального регулирования применим во многох областях применения робота: движение по
Пропорциональное регулирование:
err =sensor1-sensor2
u=err*2.2
где: u – это управляющее воздействие
sensor1,sensor2 – это сигналы
Пропорциональное регулирование: err =sensor1-sensor2 u=err*2.2 где: u – это управляющее воздействие sensor1,sensor2 – это сигналы
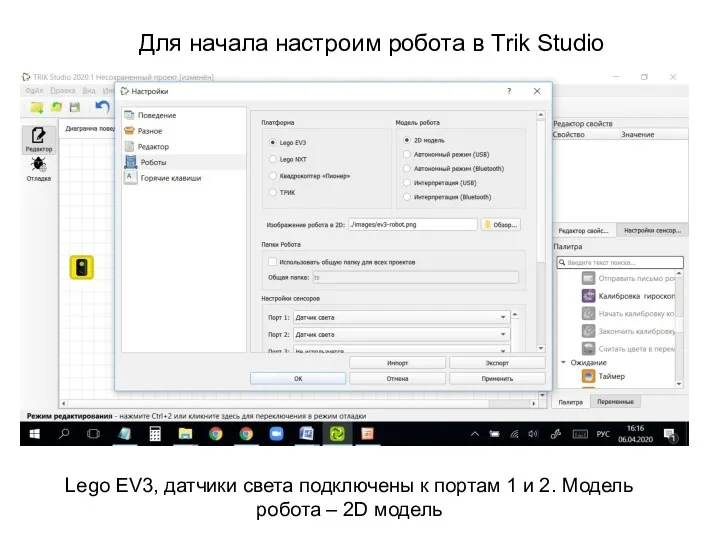
Lego EV3, датчики света подключены к портам 1 и 2. Модель
Lego EV3, датчики света подключены к портам 1 и 2. Модель
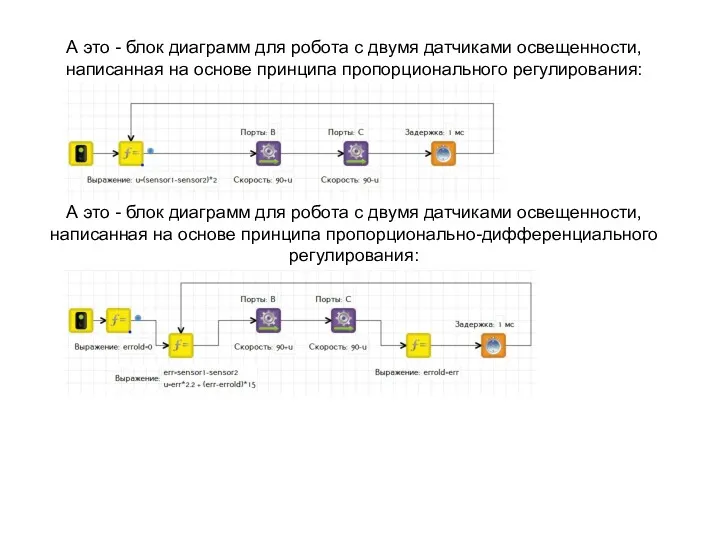
А это - блок диаграмм для робота с двумя датчиками освещенности,
А это - блок диаграмм для робота с двумя датчиками освещенности,

Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
 Особенности преподавания математики...ТОНК, ч.1
Особенности преподавания математики...ТОНК, ч.1 Corporate environmental management
Corporate environmental management Патентные базы данных компании Questel
Патентные базы данных компании Questel Криминологическая характеристика личности преступника-экстремиста
Криминологическая характеристика личности преступника-экстремиста Урок технологии на тему Каллы из ватных дисков
Урок технологии на тему Каллы из ватных дисков Принцип относительности Галилея. Преобразования Галилея
Принцип относительности Галилея. Преобразования Галилея Проект История русской куклы
Проект История русской куклы Вегетативное размножение растений
Вегетативное размножение растений Деловая игра как способ совершенствования личности ребенка
Деловая игра как способ совершенствования личности ребенка Конкурс Фото-сказка Курочка Ряба
Конкурс Фото-сказка Курочка Ряба Сетевое программное обеспечение
Сетевое программное обеспечение Общие положения об испытаниях
Общие положения об испытаниях Презентация исследовательской работы по теме Слова-паразиты в речи воспитанников Детского дома, выполненния Некрасовым Никитой 5 класс
Презентация исследовательской работы по теме Слова-паразиты в речи воспитанников Детского дома, выполненния Некрасовым Никитой 5 класс презентация к литературно - музыкальной композиции Детство, опаленное войной
презентация к литературно - музыкальной композиции Детство, опаленное войной Математико-картографическое моделирование
Математико-картографическое моделирование Электрические машины постоянного тока
Электрические машины постоянного тока 20181218_urok_prava_i_obyazannosti_v_seme
20181218_urok_prava_i_obyazannosti_v_seme Народные промыслы. Городец. Работа с бумагой. Аппликационные работы. 2 класс
Народные промыслы. Городец. Работа с бумагой. Аппликационные работы. 2 класс Расчет основных показателей бизнес-плана на примере предприятия ООО Дальтранс Люкс
Расчет основных показателей бизнес-плана на примере предприятия ООО Дальтранс Люкс Вязание крючком
Вязание крючком Социальное проектирование
Социальное проектирование 04.2020-МДК 01.07 (2)
04.2020-МДК 01.07 (2) La France. Французский язык
La France. Французский язык Влажно-тепловая обработка деталей
Влажно-тепловая обработка деталей Кошки - наши друзья
Кошки - наши друзья Консультация Берегите зрение вашего ребенка
Консультация Берегите зрение вашего ребенка Мультипликация, как средство подготовки дошкольников к обучению в школе
Мультипликация, как средство подготовки дошкольников к обучению в школе Обязательственное право
Обязательственное право