- Прототип робота для автономного перемещения контейнеров с сельхозпродукцией

Содержание
- 2. Цель работы Разработать прототип робота для автономного перемещения контейнеров с сельхозпродукцией. Сделать робот максимально простым в
- 3. Задачи Разработать прототип робота Разработать захватный механизм Собрать прототип Написать программу Протестировать систему Оптимизировать конструкцию
- 4. Актуальность проекта Сбор урожая – это трудоёмкий процесс, привлекающий большое количество человеко-часов. Важной задачей для сельского
- 5. Описание Основа устройства – платформа Robotino от Festo Didactic. Мобильный робот представляет собой автономную подвижную платформу
- 6. Robotino – краткое описание Система питания – два свинцовых аккумулятора на 12 В Двигательная система Измерительная
- 7. Robotino – технология привода Привод на каждой оси колеса представляет собой тахометр, ролик, двигатель, редуктор с
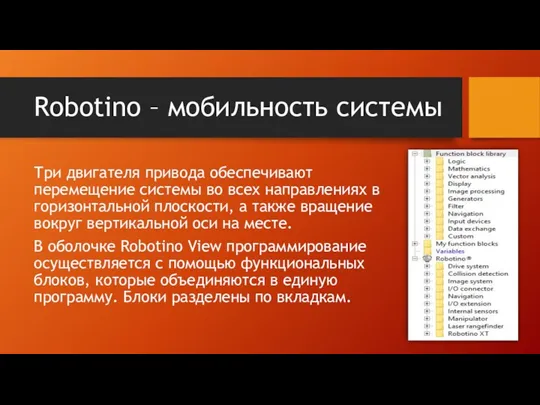
- 8. Robotino – мобильность системы Три двигателя привода обеспечивают перемещение системы во всех направлениях в горизонтальной плоскости,
- 9. Robotino – мобильность системы
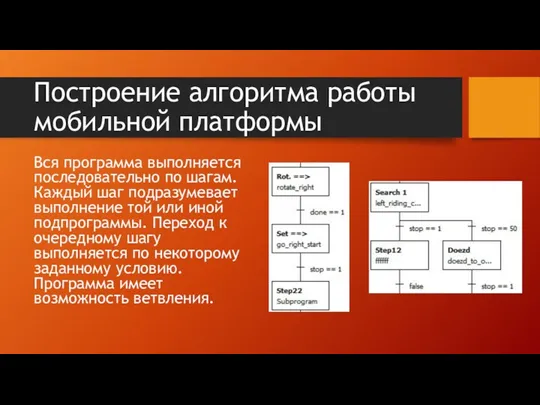
- 10. Построение алгоритма работы мобильной платформы Вся программа выполняется последовательно по шагам. Каждый шаг подразумевает выполнение той
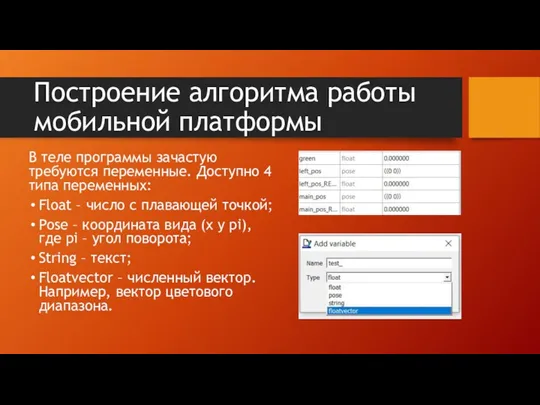
- 11. Построение алгоритма работы мобильной платформы В теле программы зачастую требуются переменные. Доступно 4 типа переменных: Float
- 12. Конструкция захватного механизма В качестве прототипа использовался двухпальцевый захват с четырёх рычажной тягой. Была разработана 3D
- 13. Привод движения захвата Для приведения в движение использовался сервопривод MG995 с надёжным мотором и продвинутой системой
- 14. Сервопривод захвата – технические характеристики
- 15. Управление сервоприводом Для управления захватом используется плата с распаянной системой защиты и стабилизации напряжения и 8-битным
- 16. Микроконтроллер ATtiny85 8-битный микроконтроллер с ARISC архитектурой (120 управляющих команд) 32 регистра общего назначения 8K для
- 17. Фрагмент кода управления сервоприводом на микроконтроллере ATtiny85 Функция InitSys () используется для настройки портов ввода-вывода и
- 18. Техническое зрение В конструкции робота используется веб-камера. Она закреплена в передней части конструкции и предназначена для
- 19. Организация кабелей При прокладке кабельных систем учитывались такие параметры, как безопасность эксплуатации, длина провода и его
- 20. Организация кабелей
- 21. Перспективы Использование 3D принтера позволяет получить элементы конструкции практически любой сложности Разработанная конструкция легко масштабируется Современная
- 22. Выводы В ходе проведённой работы была создана платформа, способная автономно и дистанционно перемещать объекты Был разработан
- 24. Скачать презентацию
Цель работы
Разработать прототип робота для автономного перемещения контейнеров с сельхозпродукцией.
Сделать робот
Цель работы
Разработать прототип робота для автономного перемещения контейнеров с сельхозпродукцией.
Сделать робот
Задачи
Разработать прототип робота
Разработать захватный механизм
Собрать прототип
Написать программу
Протестировать систему
Оптимизировать конструкцию
Задачи
Разработать прототип робота
Разработать захватный механизм
Собрать прототип
Написать программу
Протестировать систему
Оптимизировать конструкцию

Актуальность проекта
Сбор урожая – это трудоёмкий процесс, привлекающий большое количество человеко-часов.
Актуальность проекта
Сбор урожая – это трудоёмкий процесс, привлекающий большое количество человеко-часов.

Описание
Основа устройства – платформа Robotino от Festo Didactic.
Мобильный робот представляет собой
Описание
Основа устройства – платформа Robotino от Festo Didactic.
Мобильный робот представляет собой
Robotino – краткое описание
Система питания – два свинцовых аккумулятора на 12
Robotino – краткое описание
Система питания – два свинцовых аккумулятора на 12
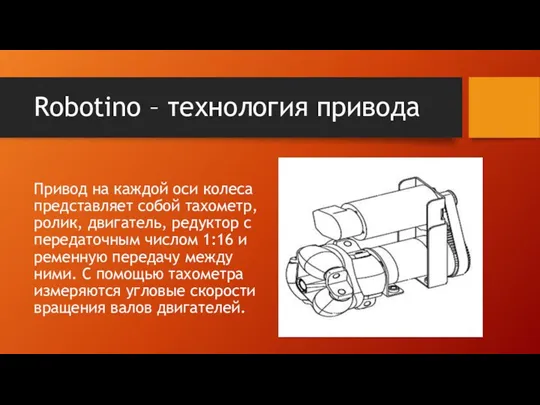
Robotino – технология привода
Привод на каждой оси колеса представляет собой тахометр,
Robotino – технология привода
Привод на каждой оси колеса представляет собой тахометр,
Robotino – мобильность системы
Три двигателя привода обеспечивают перемещение системы во всех
Robotino – мобильность системы
Три двигателя привода обеспечивают перемещение системы во всех
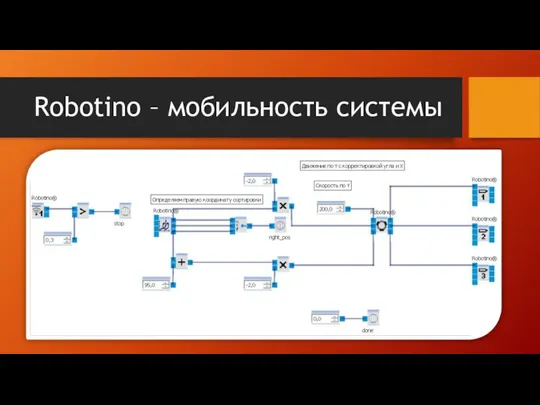
Robotino – мобильность системы
Robotino – мобильность системы
Построение алгоритма работы мобильной платформы
Вся программа выполняется последовательно по шагам. Каждый
Построение алгоритма работы мобильной платформы
Вся программа выполняется последовательно по шагам. Каждый
Построение алгоритма работы мобильной платформы
В теле программы зачастую требуются переменные. Доступно
Построение алгоритма работы мобильной платформы
В теле программы зачастую требуются переменные. Доступно
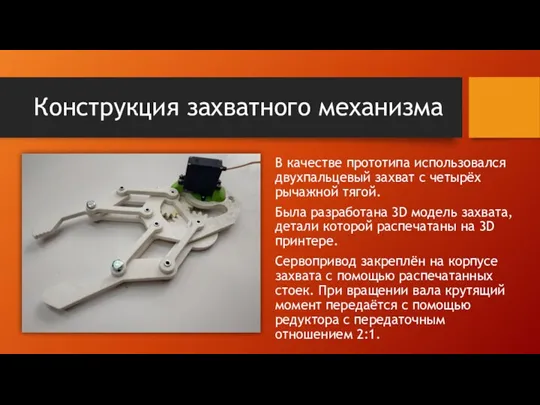
Конструкция захватного механизма
В качестве прототипа использовался двухпальцевый захват с четырёх рычажной
Конструкция захватного механизма
В качестве прототипа использовался двухпальцевый захват с четырёх рычажной
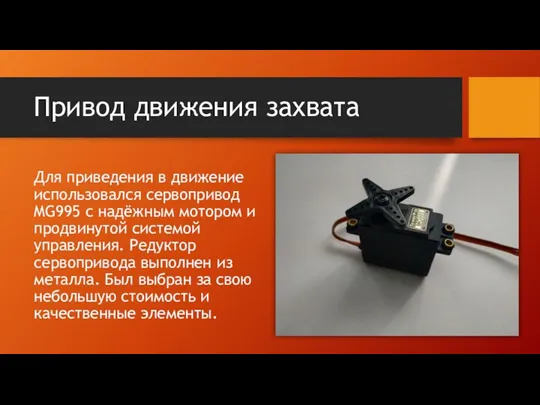
Привод движения захвата
Для приведения в движение использовался сервопривод MG995 с надёжным
Привод движения захвата
Для приведения в движение использовался сервопривод MG995 с надёжным

Сервопривод захвата – технические характеристики
Сервопривод захвата – технические характеристики
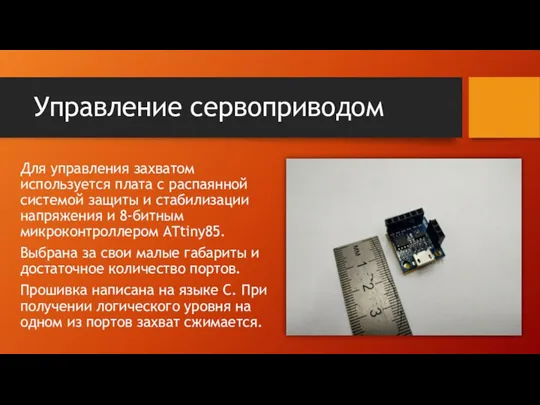
Управление сервоприводом
Для управления захватом используется плата с распаянной системой защиты и
Управление сервоприводом
Для управления захватом используется плата с распаянной системой защиты и
Микроконтроллер ATtiny85
8-битный микроконтроллер с ARISC архитектурой (120 управляющих команд)
32 регистра общего
Микроконтроллер ATtiny85
8-битный микроконтроллер с ARISC архитектурой (120 управляющих команд)
32 регистра общего

Фрагмент кода управления сервоприводом на микроконтроллере ATtiny85
Функция InitSys () используется для
Фрагмент кода управления сервоприводом на микроконтроллере ATtiny85
Функция InitSys () используется для
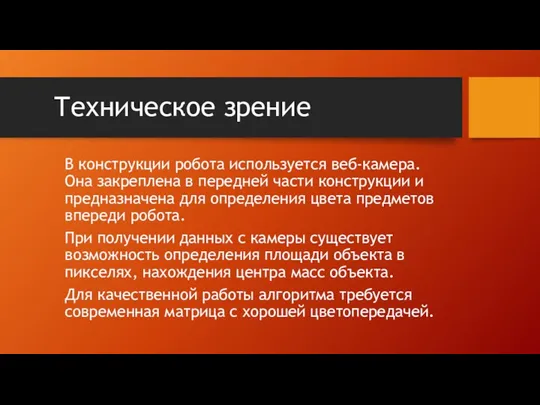
Техническое зрение
В конструкции робота используется веб-камера. Она закреплена в передней части
Техническое зрение
В конструкции робота используется веб-камера. Она закреплена в передней части

Организация кабелей
При прокладке кабельных систем учитывались такие параметры, как безопасность эксплуатации,
Организация кабелей
При прокладке кабельных систем учитывались такие параметры, как безопасность эксплуатации,

Организация кабелей
Организация кабелей

Перспективы
Использование 3D принтера позволяет получить элементы конструкции практически любой сложности
Разработанная конструкция
Перспективы
Использование 3D принтера позволяет получить элементы конструкции практически любой сложности
Разработанная конструкция
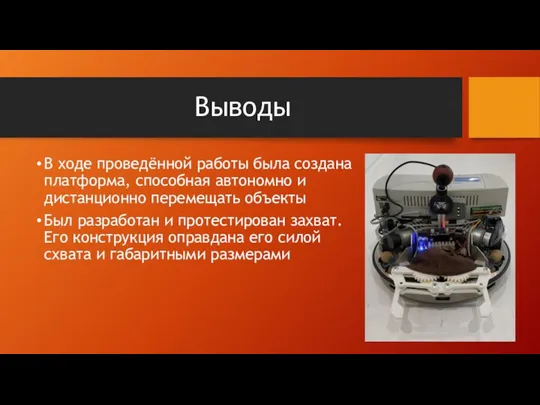
Выводы
В ходе проведённой работы была создана платформа, способная автономно и дистанционно
Выводы
В ходе проведённой работы была создана платформа, способная автономно и дистанционно
 презентация работа с родителями по фгос
презентация работа с родителями по фгос Дискриминация и права человека. Лекция 2
Дискриминация и права человека. Лекция 2 Общие вопросы ВИЧ\СПИД
Общие вопросы ВИЧ\СПИД Питательные среды. Методы культивирования микробов и аппаратура. Учет результатов анализа воздуха
Питательные среды. Методы культивирования микробов и аппаратура. Учет результатов анализа воздуха Благоустройство набережной р. Охты (Муниципальный округ Малая Охта)
Благоустройство набережной р. Охты (Муниципальный округ Малая Охта) Балаларда ерін аурулары
Балаларда ерін аурулары Порядок оборудования и содержания мостовой переправы зимой (для подразделений инженерных войск)
Порядок оборудования и содержания мостовой переправы зимой (для подразделений инженерных войск) Открытое занятие для детей подготовительной группы Дружба начинается с улыбки.
Открытое занятие для детей подготовительной группы Дружба начинается с улыбки. Теория государства и права
Теория государства и права Япония (1)
Япония (1) Внеурочное занятие по курсу Уроки нравственности по теме Золотое правило нравственности
Внеурочное занятие по курсу Уроки нравственности по теме Золотое правило нравственности Технология устройства кровельных покрытий
Технология устройства кровельных покрытий Загадки по правилам дорожного движения для 1 класса
Загадки по правилам дорожного движения для 1 класса М.И. Глинка. Опера Руслан и Людмила
М.И. Глинка. Опера Руслан и Людмила Права ребенка
Права ребенка Сүйек. Эктопиялық дамуы
Сүйек. Эктопиялық дамуы Первая помощь при повреждении грудной клетки и живота
Первая помощь при повреждении грудной клетки и живота Эксплуатация трансформаторов
Эксплуатация трансформаторов Многоуровневые подвесные потолки
Многоуровневые подвесные потолки Модернизированная переносная станция наземной разведки ПСНР-8М
Модернизированная переносная станция наземной разведки ПСНР-8М ковид
ковид Somebody That I Used To Know
Somebody That I Used To Know Международный день коренных народов мира
Международный день коренных народов мира Башкортостан - жемчужина Урала
Башкортостан - жемчужина Урала Укусы ядовитых змей и насекомых
Укусы ядовитых змей и насекомых Напряженность электростатического поля
Напряженность электростатического поля Специальное образование в меняющемся мире. Россия
Специальное образование в меняющемся мире. Россия Как мы весело живем!
Как мы весело живем!