Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергии для материальной точки и системы презентация
- Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергии для материальной точки и системы

Содержание
- 2. Содержание Тема 9. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергии для материальной точки
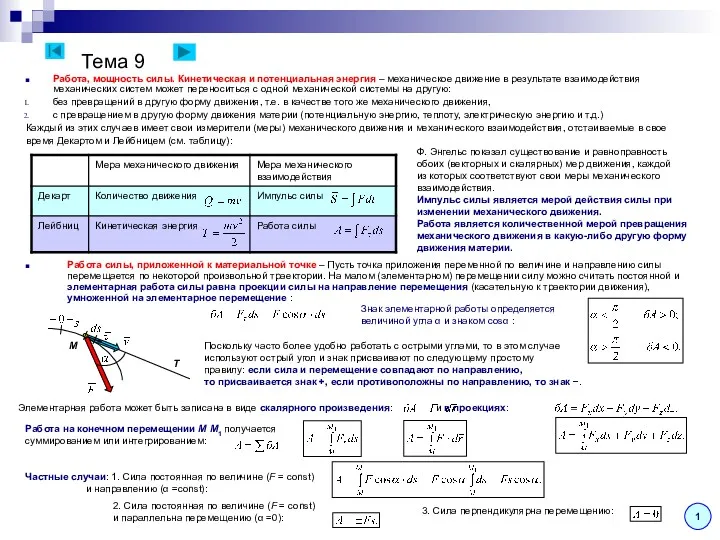
- 3. Тема 9 Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение в результате взаимодействия механических
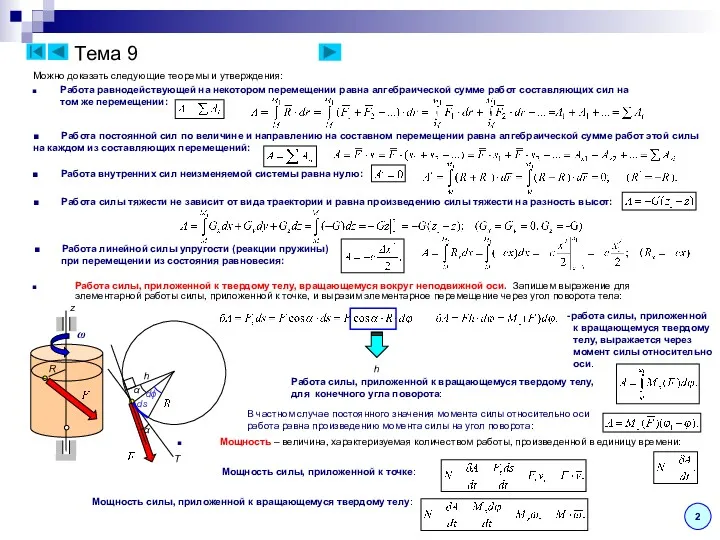
- 4. Тема 9 Можно доказать следующие теоремы и утверждения: Работа равнодействующей на некотором перемещении равна алгебраической сумме
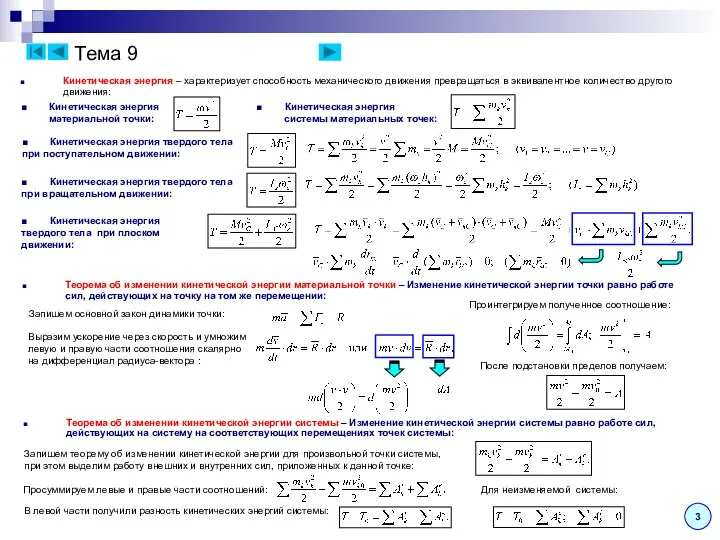
- 5. Тема 9 Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное количество другого движения: ■
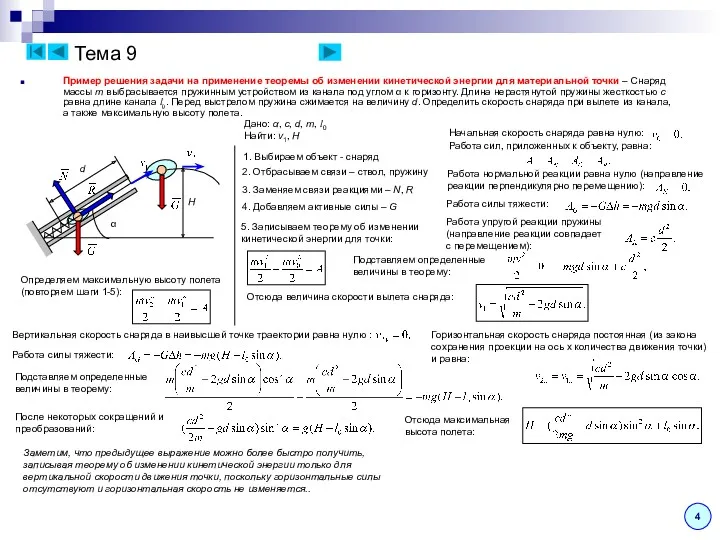
- 6. Тема 9 Пример решения задачи на применение теоремы об изменении кинетической энергии для материальной точки –
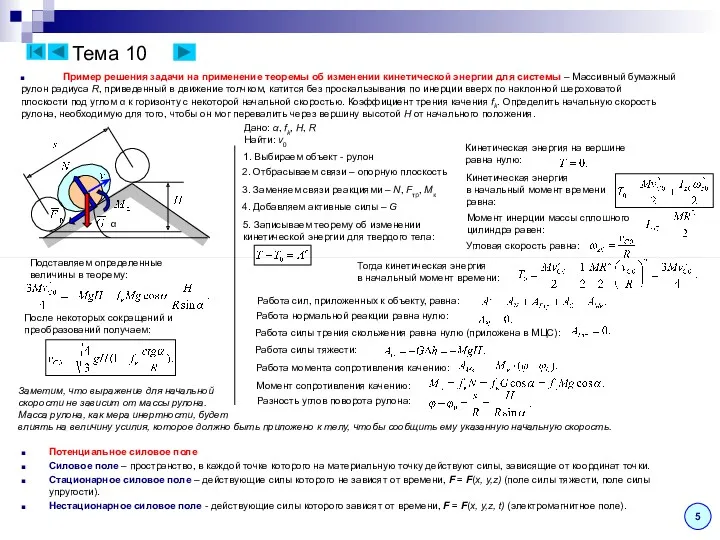
- 7. Пример решения задачи на применение теоремы об изменении кинетической энергии для системы – Массивный бумажный рулон
- 8. ■ Потенциальное силовое поле – в котором существует функция, в каждой точке пространства удовлетворяющая соотношениям: где
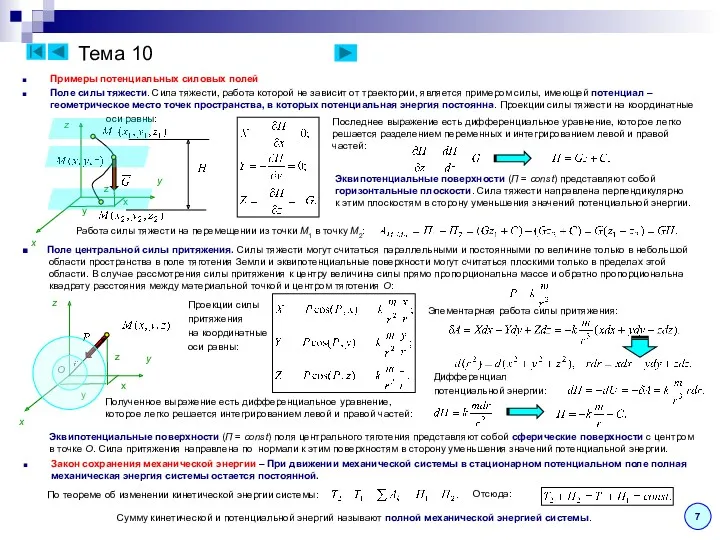
- 9. Тема 10 Примеры потенциальных силовых полей Поле силы тяжести. Сила тяжести, работа которой не зависит от
- 11. Скачать презентацию
Содержание
Тема 9. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической
Содержание
Тема 9. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической
Тема 9
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение
Тема 9
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение
Тема 9
Можно доказать следующие теоремы и утверждения:
Работа равнодействующей на некотором
Тема 9
Можно доказать следующие теоремы и утверждения:
Работа равнодействующей на некотором
Тема 9
Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное
Тема 9
Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное
Тема 9
Пример решения задачи на применение теоремы об изменении кинетической энергии
Тема 9
Пример решения задачи на применение теоремы об изменении кинетической энергии
Пример решения задачи на применение теоремы об изменении кинетической энергии для
Пример решения задачи на применение теоремы об изменении кинетической энергии для
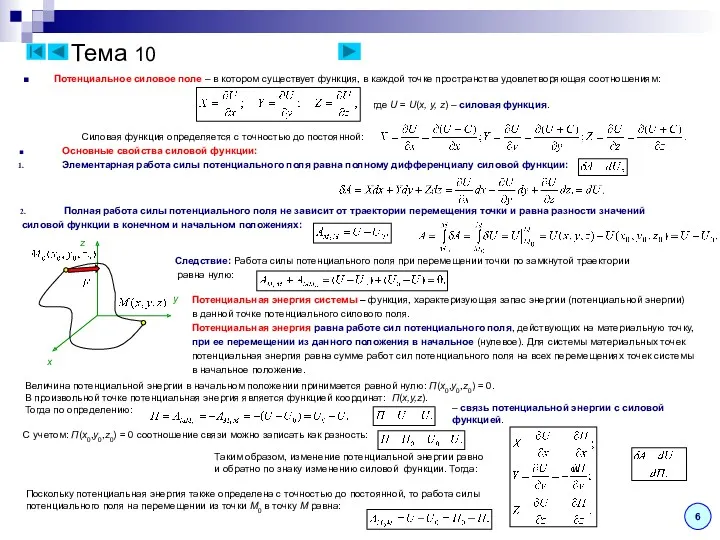
■ Потенциальное силовое поле – в котором существует функция, в каждой
■ Потенциальное силовое поле – в котором существует функция, в каждой
Тема 10
Примеры потенциальных силовых полей
Поле силы тяжести. Сила тяжести, работа которой
Тема 10
Примеры потенциальных силовых полей
Поле силы тяжести. Сила тяжести, работа которой
 Мастер-класс Пасхальное чудо-яйцо
Мастер-класс Пасхальное чудо-яйцо Познавательная область Познание
Познавательная область Познание Мастер - клаас Солнышко
Мастер - клаас Солнышко 20231016_kompleksnyy_analiz_teksta
20231016_kompleksnyy_analiz_teksta МЕТАЛЛЫ
МЕТАЛЛЫ Достопримечательности Тарусы на англ. языке
Достопримечательности Тарусы на англ. языке Элементы теории информации
Элементы теории информации Жартылай құрғақ әдіспен керамикалық кірпіш өндіру зауыты
Жартылай құрғақ әдіспен керамикалық кірпіш өндіру зауыты Философия Августина Блаженного
Философия Августина Блаженного Презентация Изотерапия и ее возможности в работе с детьми дошкольного возраста
Презентация Изотерапия и ее возможности в работе с детьми дошкольного возраста Интенсив. Паблики
Интенсив. Паблики Функции государства. (Тема 4)
Функции государства. (Тема 4) Удосконалена електрична централізація на новій елементній базі УЕЦ-М
Удосконалена електрична централізація на новій елементній базі УЕЦ-М открытый урок по теме ЖИРЫ
открытый урок по теме ЖИРЫ Максим Горький - жизнь и творчество
Максим Горький - жизнь и творчество Роль музыкально-дидактических игр в музыкальном воспитании детей.
Роль музыкально-дидактических игр в музыкальном воспитании детей. Летний сад
Летний сад Неметаллические материалы. (Тема 16)
Неметаллические материалы. (Тема 16) Электрические цепи постоянного тока
Электрические цепи постоянного тока Остап и Андрий в повести Н.В. Гоголя Тарас Бульба
Остап и Андрий в повести Н.В. Гоголя Тарас Бульба Руководство, органы управления, силы и средства ВСМК и ФМГСО
Руководство, органы управления, силы и средства ВСМК и ФМГСО Организация работы комиссии по предупреждению и ликвидации чрезвычайных ситуаций и обеспечению пожарной безопасности
Организация работы комиссии по предупреждению и ликвидации чрезвычайных ситуаций и обеспечению пожарной безопасности Классификация программного обеспечения (ПО)
Классификация программного обеспечения (ПО) Презентация. Семинар-практикум Филимоновская игрушка
Презентация. Семинар-практикум Филимоновская игрушка Mercedes Benz Smart Key Programming
Mercedes Benz Smart Key Programming М. И. Глинка. Вокальное творчество
М. И. Глинка. Вокальное творчество Введение в педагогическую деятельность. Объем дисциплины и виды учебной работы
Введение в педагогическую деятельность. Объем дисциплины и виды учебной работы История бренда Nike
История бренда Nike