- Радиотехнические системы (РТС)

Содержание
- 2. РЛС И ИХ КЛАССИФИКАЦИЯ Локация (location происходит от латинского locatio - размещение) — определение размещения, местоположения
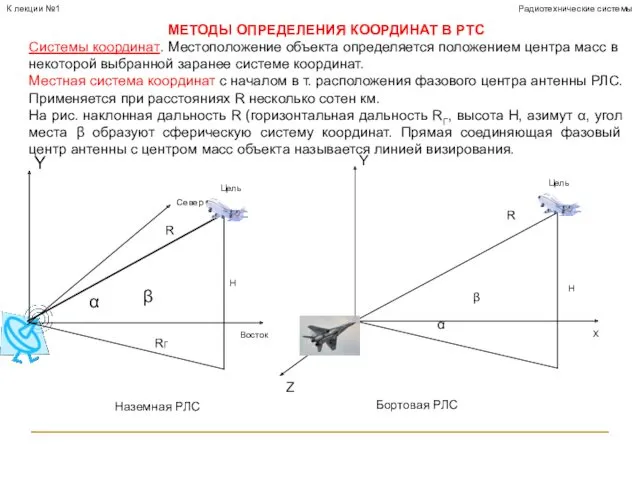
- 3. Радиотехнические системы К лекции №1 МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РТС Системы координат. Местоположение объекта определяется положением
- 4. Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ определять положение и перемещение точки
- 5. Сферическая система координат Сферическими координатами объекта наблюдения (объект находится в точке М) являются: R – радиус-вектор
- 6. РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ Они решают часть задачи местоопределения объектов, т.е. определяют наклонную дальность. Вводятся условия
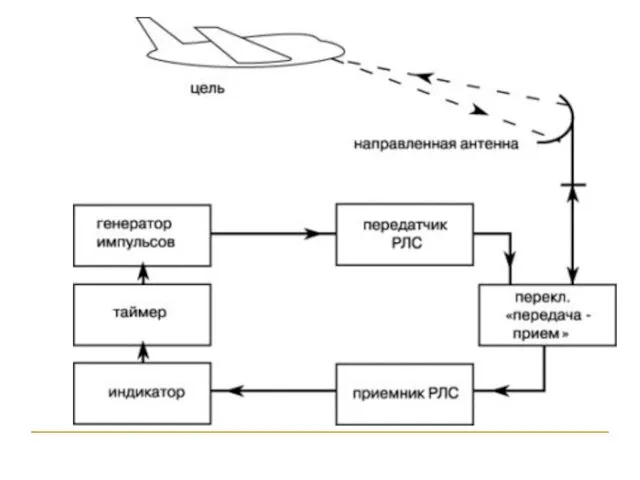
- 7. Функциональная схема импульсного измерителя дальности
- 10. - длительность зондирующего импульса, - период повторения зондирующих импульсов, - скважность последовательности зондирующих импульсов.
- 11. Достоинства импульсных дальномеров: 1. возможность построения РЛС с использованием одной антенны; 2. простота отсчета дальности; 3.
- 12. ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ Фазовые методы основаны на измерении разности фаз излучённых и принятых синусоидальных радиосигналов,
- 13. Достоинство фазового метода состоит в простоте структуры измерительного устройства (но при двух антеннах). Недостатки фазового метода:
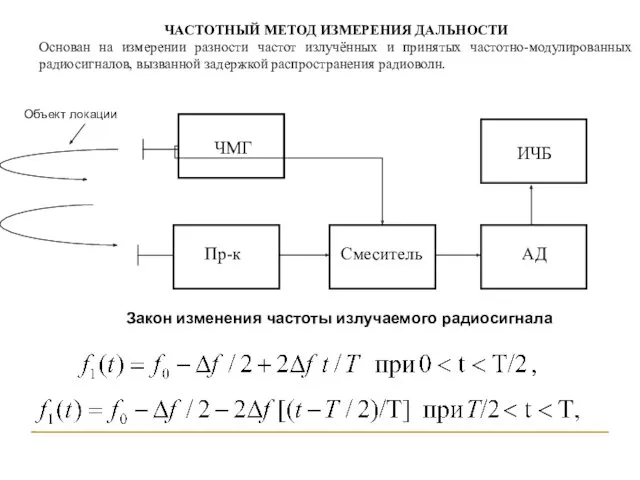
- 14. ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ Основан на измерении разности частот излучённых и принятых частотно-модулированных радиосигналов, вызванной задержкой
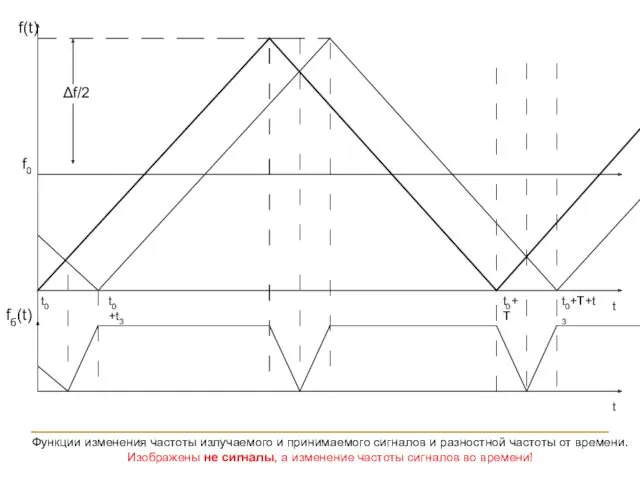
- 15. fб(t) Функции изменения частоты излучаемого и принимаемого сигналов и разностной частоты от времени. Изображены не сигналы,
- 16. Мгновенное значение частоты биений непостоянно, т.к. период модуляции Т
- 17. Измеряя частоту биений определяем дальность до цели (т.е. число биений за период модуляции). Один из способов
- 18. Спектр частоты биений дискретный и по этой причине и отсчеты частоты носят дискретный характер. Частотный метод
- 19. Методы измерения угловых координат Пеленгация (peling-угол) - определение направления на объект (определение угловых координат), отсчитываемое от
- 20. Амплитудные методы используют направленные свойства антенн Применяются методы: максимума; минимума; сравнения; равносигнальный. При пеленгации по методу
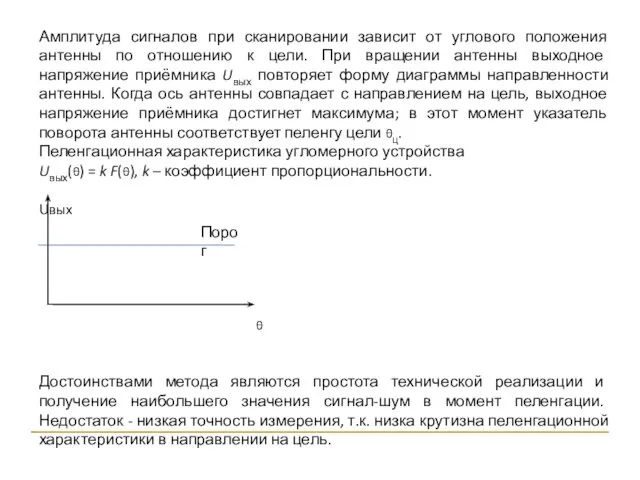
- 22. Амплитуда сигналов при сканировании зависит от углового положения антенны по отношению к цели. При вращении антенны
- 23. Пеленгация с использованием оценки производной огибающей пачки отраженных импульсов Момент совпадения максимума пачки отраженных импульсов с
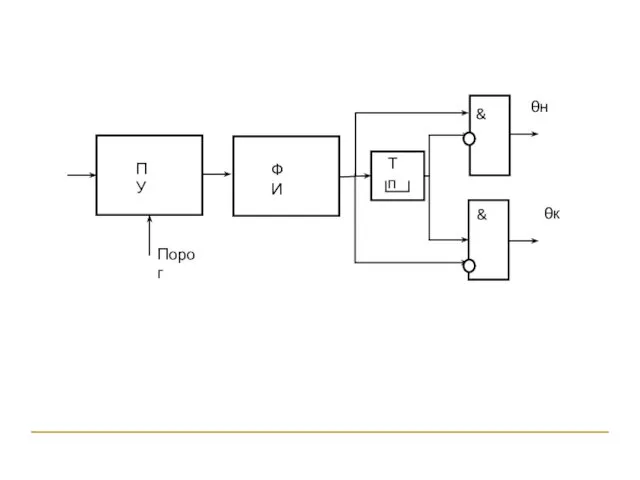
- 24. Схема пеленгатора по методу максимума с использованием производной огибающей пачки
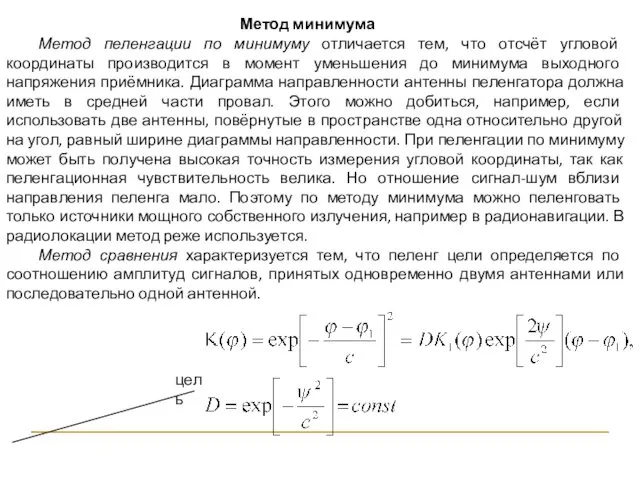
- 25. цель Метод минимума Метод пеленгации по минимуму отличается тем, что отсчёт угловой координаты производится в момент
- 26. Вариантом метода сравнения является равносигнальный метод пеленгации. Он также основан на сравнении амплитуд сигналов, принимаемых двумя
- 27. Ошибка (СКО) определения фазы где ζ – разность фаз Фазовый метод Фазовые методы основаны на измерении
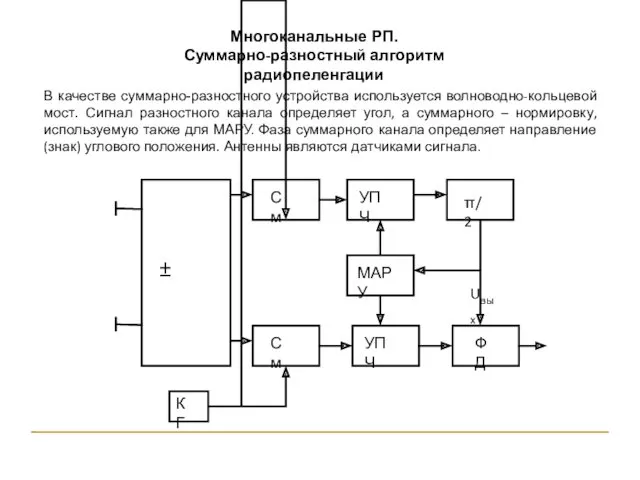
- 28. Многоканальные РП. Суммарно-разностный алгоритм радиопеленгации В качестве суммарно-разностного устройства используется волноводно-кольцевой мост. Сигнал разностного канала определяет
- 29. На большом расстоянии разность фаз Удобно использование ФАР. Точность различных методов А-А; А-Ф; Ф-Ф примерно одинакова.
- 30. УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ Дальность действия РЛС в свободном пространстве Дальностью действия радиолокационной станции называется наибольшее
- 31. На входе приемника активной РЛС пороговая мощность сигнала при обнаружении: >qckp, Sa =S2 – активная площадь
- 33. Скачать презентацию
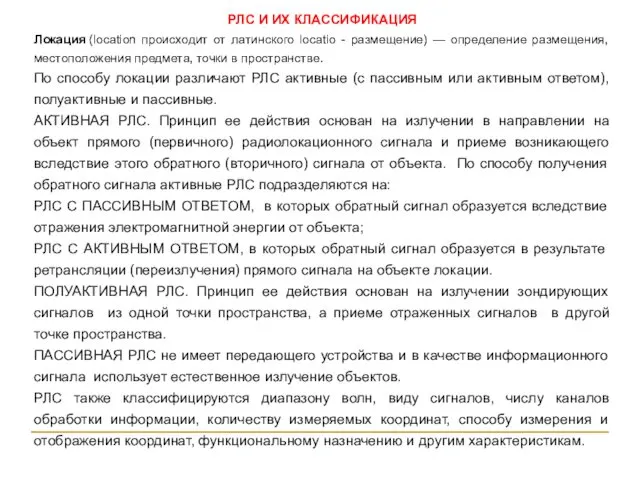
РЛС И ИХ КЛАССИФИКАЦИЯ
Локация (location происходит от латинского locatio - размещение)
РЛС И ИХ КЛАССИФИКАЦИЯ
Локация (location происходит от латинского locatio - размещение)
Радиотехнические системы
К лекции №1
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РТС
Системы координат. Местоположение объекта
Радиотехнические системы
К лекции №1
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РТС
Системы координат. Местоположение объекта
Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ
Систе́ма координа́т — комплекс определений, реализующий метод координат, то есть способ
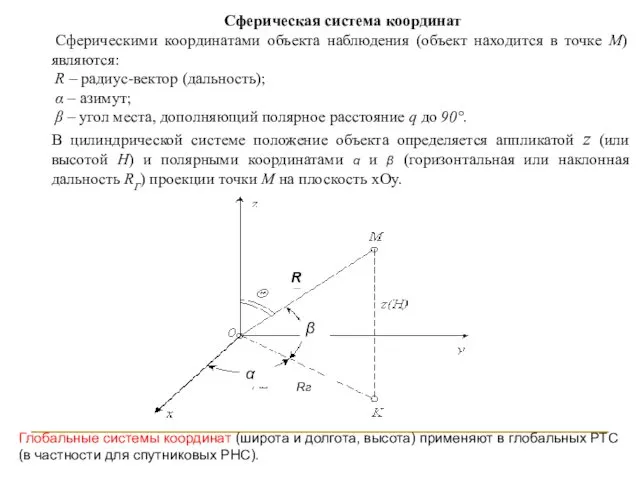
Сферическая система координат
Сферическими координатами объекта наблюдения (объект находится в точке М)
Сферическая система координат
Сферическими координатами объекта наблюдения (объект находится в точке М)
РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
Они решают часть задачи местоопределения объектов, т.е. определяют
РАДИОЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
Они решают часть задачи местоопределения объектов, т.е. определяют
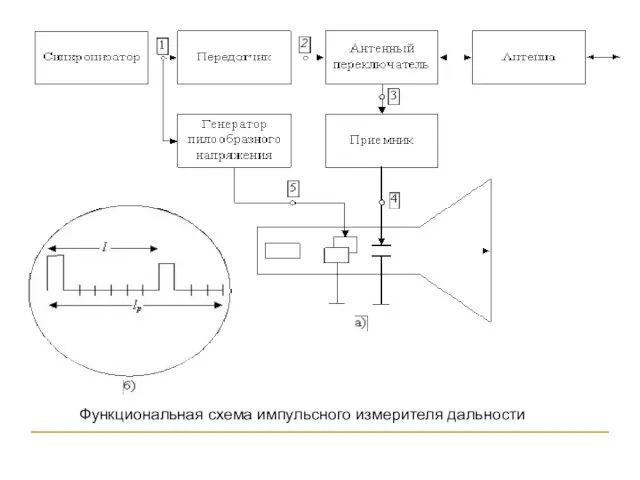
Функциональная схема импульсного измерителя дальности
Функциональная схема импульсного измерителя дальности
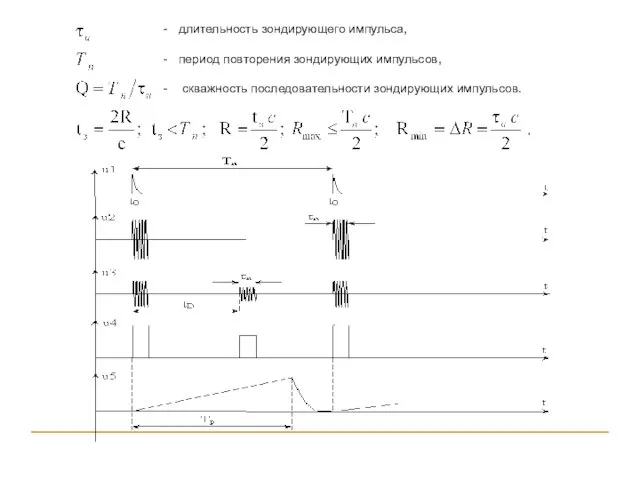
- длительность зондирующего импульса,
- период повторения зондирующих импульсов,
- скважность последовательности зондирующих
- длительность зондирующего импульса,
- период повторения зондирующих импульсов,
- скважность последовательности зондирующих
Достоинства импульсных дальномеров:
1. возможность построения РЛС с использованием одной антенны;
2. простота отсчета
Достоинства импульсных дальномеров:
1. возможность построения РЛС с использованием одной антенны;
2. простота отсчета
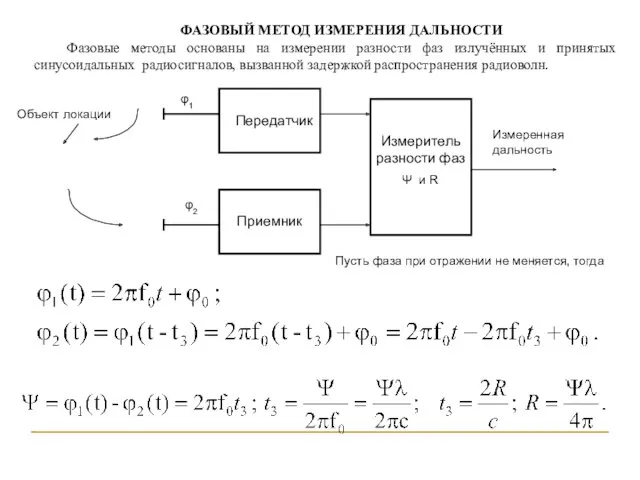
ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Фазовые методы основаны на измерении разности фаз излучённых и
ФАЗОВЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Фазовые методы основаны на измерении разности фаз излучённых и
Достоинство фазового метода состоит в простоте структуры измерительного устройства (но при
ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Основан на измерении разности частот излучённых и принятых
ЧАСТОТНЫЙ МЕТОД ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Основан на измерении разности частот излучённых и принятых
fб(t)
Функции изменения частоты излучаемого и принимаемого сигналов и разностной частоты от
fб(t)
Функции изменения частоты излучаемого и принимаемого сигналов и разностной частоты от
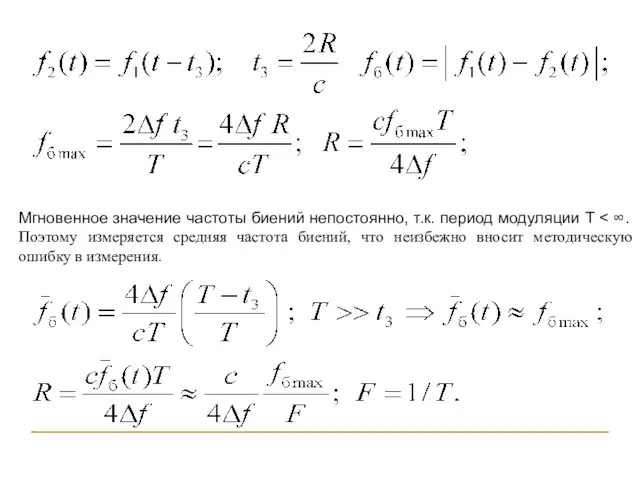
Мгновенное значение частоты биений непостоянно, т.к. период модуляции Т < ∞.
Мгновенное значение частоты биений непостоянно, т.к. период модуляции Т < ∞.
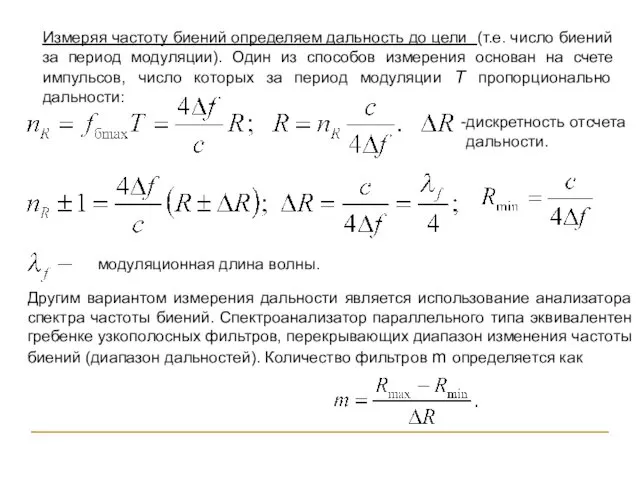
Измеряя частоту биений определяем дальность до цели (т.е. число биений за
Измеряя частоту биений определяем дальность до цели (т.е. число биений за
Спектр частоты биений дискретный и по этой причине и отсчеты частоты
Спектр частоты биений дискретный и по этой причине и отсчеты частоты
Методы измерения угловых координат
Пеленгация (peling-угол) - определение направления на объект (определение
Методы измерения угловых координат
Пеленгация (peling-угол) - определение направления на объект (определение
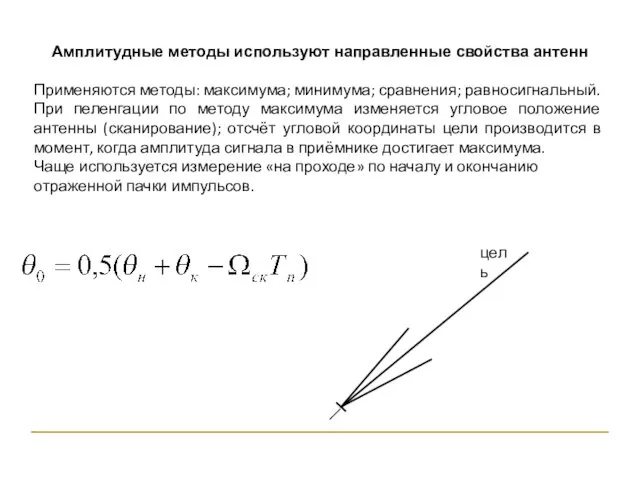
Амплитудные методы используют направленные свойства антенн
Применяются методы: максимума; минимума; сравнения; равносигнальный.
При
Амплитудные методы используют направленные свойства антенн
Применяются методы: максимума; минимума; сравнения; равносигнальный.
При
Амплитуда сигналов при сканировании зависит от углового положения антенны по отношению
Амплитуда сигналов при сканировании зависит от углового положения антенны по отношению
Пеленгация с использованием оценки производной огибающей
пачки отраженных импульсов
Момент совпадения максимума
Пеленгация с использованием оценки производной огибающей
пачки отраженных импульсов
Момент совпадения максимума
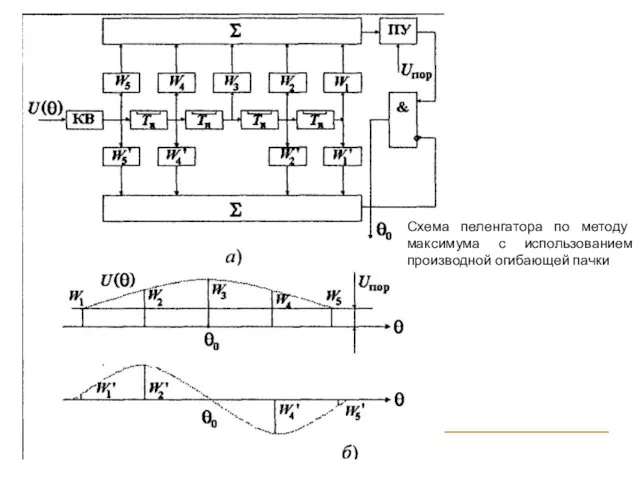
Схема пеленгатора по методу максимума с использованием производной огибающей пачки
Схема пеленгатора по методу максимума с использованием производной огибающей пачки
цель
Метод минимума
Метод пеленгации по минимуму отличается тем, что отсчёт
цель
Метод минимума
Метод пеленгации по минимуму отличается тем, что отсчёт
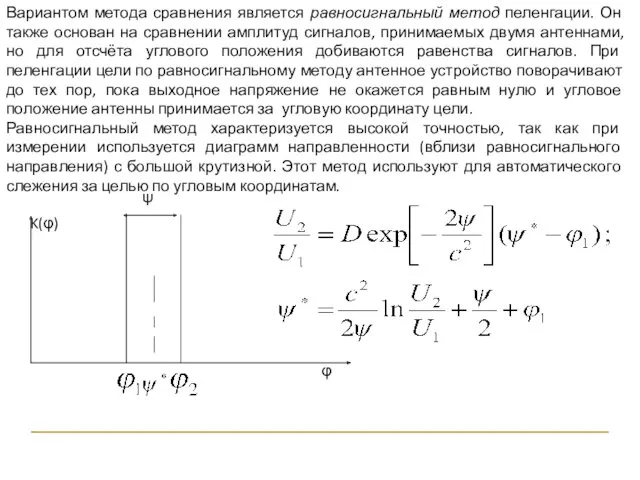
Вариантом метода сравнения является равносигнальный метод пеленгации. Он также основан на
Вариантом метода сравнения является равносигнальный метод пеленгации. Он также основан на
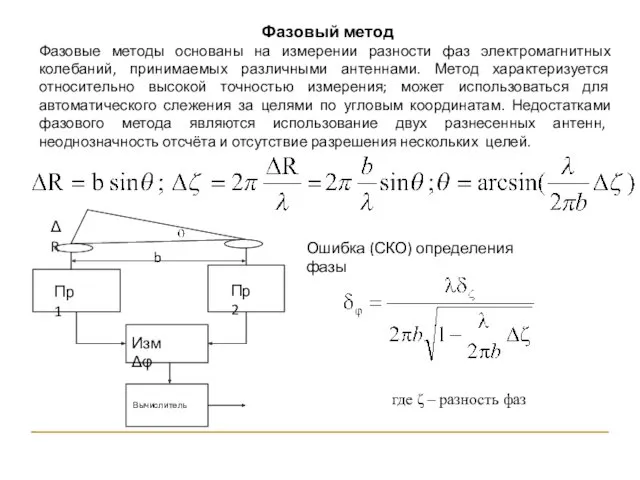
Ошибка (СКО) определения фазы
где ζ – разность фаз
Фазовый метод
Фазовые методы основаны
Ошибка (СКО) определения фазы
где ζ – разность фаз
Фазовый метод
Фазовые методы основаны
Многоканальные РП.
Суммарно-разностный алгоритм радиопеленгации
В качестве суммарно-разностного устройства используется волноводно-кольцевой мост. Сигнал
Многоканальные РП.
Суммарно-разностный алгоритм радиопеленгации
В качестве суммарно-разностного устройства используется волноводно-кольцевой мост. Сигнал
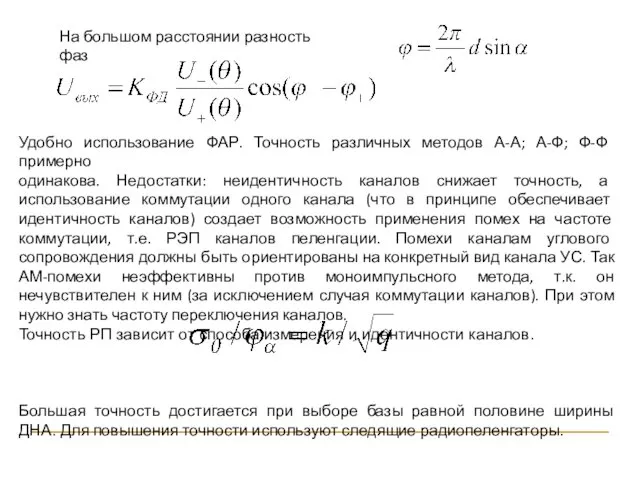
На большом расстоянии разность фаз
Удобно использование ФАР. Точность различных методов А-А;
На большом расстоянии разность фаз
Удобно использование ФАР. Точность различных методов А-А;
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ
Дальность действия РЛС в свободном пространстве
Дальностью действия радиолокационной
УРАВНЕНИЕ ДАЛЬНОСТИ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ
Дальность действия РЛС в свободном пространстве
Дальностью действия радиолокационной
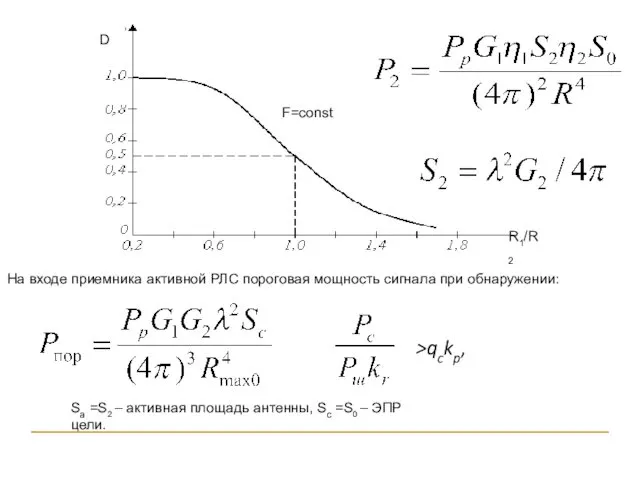
На входе приемника активной РЛС пороговая мощность сигнала при обнаружении:
>qckp,
Sa =S2
На входе приемника активной РЛС пороговая мощность сигнала при обнаружении:
>qckp,
Sa =S2
 схематичное изображение правил занятий с детьми в песочнице
схематичное изображение правил занятий с детьми в песочнице Цифровая обработка аэрокосмических изображений
Цифровая обработка аэрокосмических изображений Семиотика урологических заболеваний. Методы обследования урологических больных
Семиотика урологических заболеваний. Методы обследования урологических больных Музыкальная живопись Мусоргского
Музыкальная живопись Мусоргского Миниатюрная ведущая, способная преувеличить масштаб любого события!
Миниатюрная ведущая, способная преувеличить масштаб любого события! Презентация Особенности общения дошкольников со сверстниками
Презентация Особенности общения дошкольников со сверстниками Использование шаблона технологической карты при планировании НОД
Использование шаблона технологической карты при планировании НОД Проект по предмету Окружающий мир на тему: Разнообразие природы родного края 3 класс
Проект по предмету Окружающий мир на тему: Разнообразие природы родного края 3 класс Матрица карьерного роста 1 линия
Матрица карьерного роста 1 линия Вольфрам W
Вольфрам W Информация о нашем классе.
Информация о нашем классе. мастер-класс по созданию интерактивной презентации
мастер-класс по созданию интерактивной презентации Электропитание и электроснабжение нетяговых потребителей
Электропитание и электроснабжение нетяговых потребителей Десмургия.Таңудың түрлері. Жарақат. Жаралану процесі,алғашқы көмек көрсету
Десмургия.Таңудың түрлері. Жарақат. Жаралану процесі,алғашқы көмек көрсету Insertable Dust Collection Filters
Insertable Dust Collection Filters Анализ собственного капитала организации
Анализ собственного капитала организации Четыре модели арктической экономики
Четыре модели арктической экономики Презентация Эффективное сотрудничество учителя - логопеда с родителями. Обобщение опыта работы.
Презентация Эффективное сотрудничество учителя - логопеда с родителями. Обобщение опыта работы. Как написать пресс-релиз
Как написать пресс-релиз Анализ безопасности грузовых операций на судне типа Речной-25
Анализ безопасности грузовых операций на судне типа Речной-25 Совместная деятельность ДОУ и школы по работе ранней профориентации дошкольников и младших школьников
Совместная деятельность ДОУ и школы по работе ранней профориентации дошкольников и младших школьников 20231016_prezentatsiya_microsoft_office_powerpoint
20231016_prezentatsiya_microsoft_office_powerpoint Parts of the body
Parts of the body URSA – крупная европейская компания
URSA – крупная европейская компания Методология и методы научного исследования
Методология и методы научного исследования Статистические испытания РЭА
Статистические испытания РЭА Протезирование дефектов зубов искусственными керамическими коронками
Протезирование дефектов зубов искусственными керамическими коронками Колокола. Колокольные звоны
Колокола. Колокольные звоны