- Регулирование угловой скорости асинхронных двигателй

Содержание
- 2. 1) Регулирование скорости вращения АД изменением числа пар полюсов. 2) Регулирование скорости вращения АД изменением частоты
- 3. Из уравнения механической характеристики АД (1) и выражения следует, что скорость АД является функцией многих величин:
- 4. Механические характеристики АД с различным числом пар полюсов имеют вид, как показано на рис.1. (2) 1.
- 5. На статоре АД в одни и те же пазы укладываются 2-е обмотки, имеющие разное число пар
- 6. Хорошо известно и широко применяемо соединение обмотки статора в «звезду» - Y (р = 2) и
- 7. 6 Из выражения следует, что регулирование скорости двигателя обеспечивается изменением f1 без значительного изменения скольжения. В
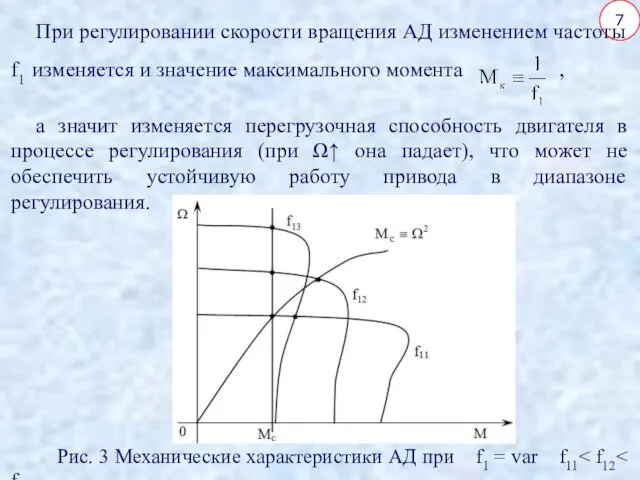
- 8. 7 При регулировании скорости вращения АД изменением частоты f1 изменяется и значение максимального момента , а
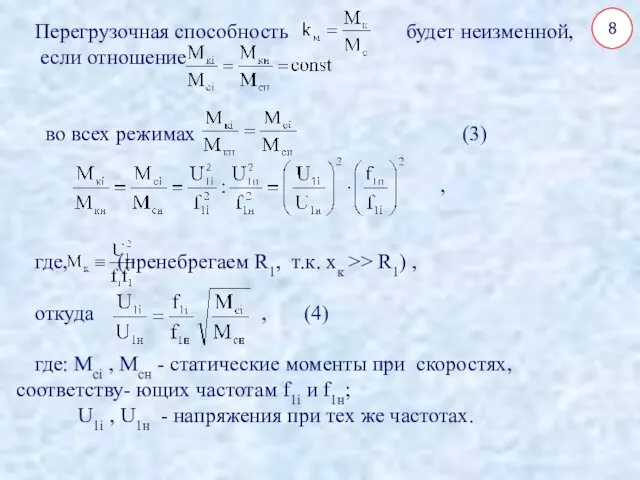
- 9. 8 Перегрузочная способность будет неизменной, если отношение во всех режимах (3) , где, (пренебрегаем R1, т.к.
- 10. Рассмотрим характер регулирования напряжения для наиболее распространённых законов изменения нагрузки. 1. Mc = const, тогда из
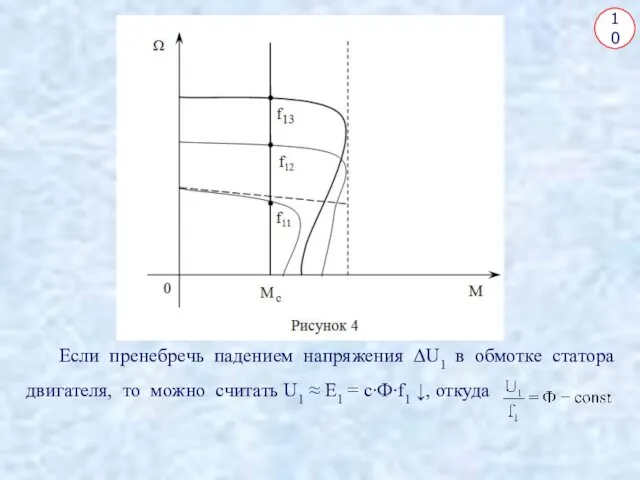
- 11. 10 Если пренебречь падением напряжения ΔU1 в обмотке статора двигателя, то можно считать U1 ≈ E1
- 12. 11 Если нарушить это условие, т.е. при U1 = const изменить только f1, то с ↓f1
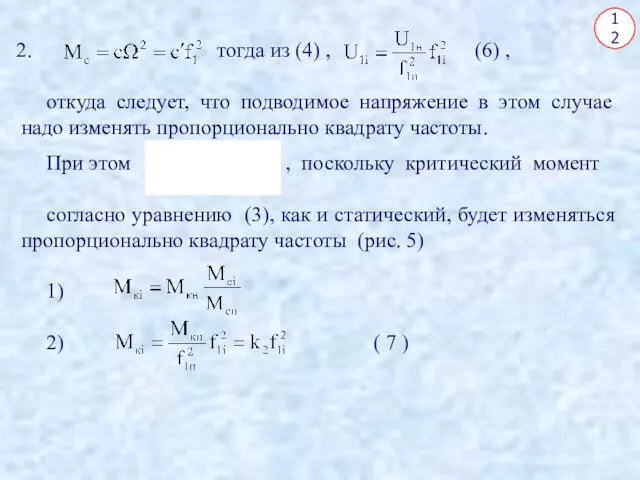
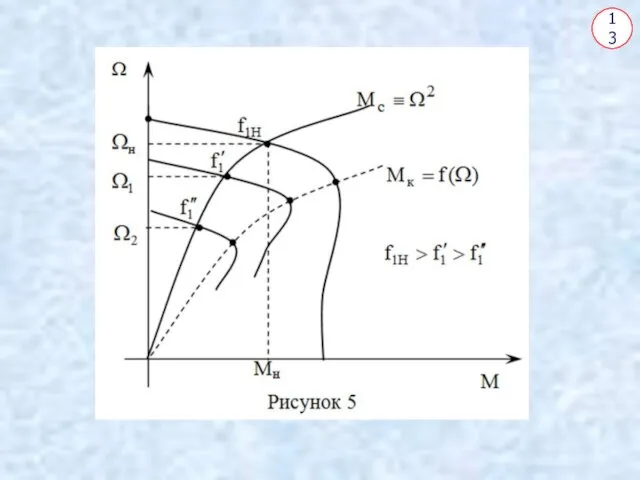
- 13. 12 тогда из (4) , (6) , откуда следует, что подводимое напряжение в этом случае надо
- 14. 13
- 15. Если регулировать напряжение, подводимое к фазам статора АД, то можно изменять Mк ≡ U12 , не
- 17. Скачать презентацию
1) Регулирование скорости вращения АД изменением числа пар полюсов.
2) Регулирование скорости
1) Регулирование скорости вращения АД изменением числа пар полюсов.
2) Регулирование скорости
Из уравнения механической характеристики АД
(1)
и выражения следует, что скорость АД
Из уравнения механической характеристики АД
(1)
и выражения следует, что скорость АД
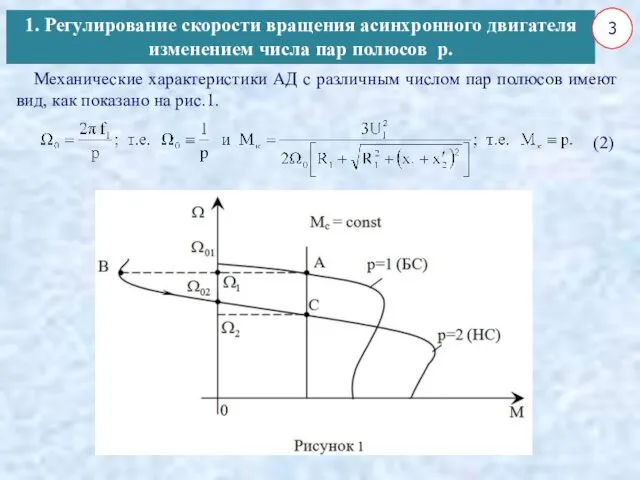
Механические характеристики АД с различным числом пар полюсов имеют вид,
Механические характеристики АД с различным числом пар полюсов имеют вид,
На статоре АД в одни и те же пазы укладываются 2-е
На статоре АД в одни и те же пазы укладываются 2-е
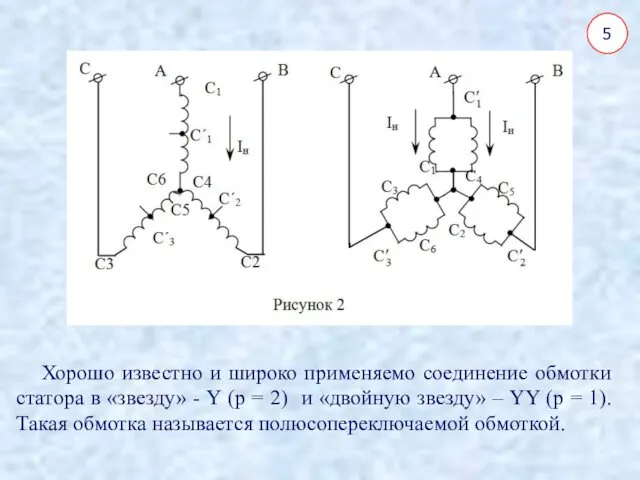
Хорошо известно и широко применяемо соединение обмотки статора в «звезду»
Хорошо известно и широко применяемо соединение обмотки статора в «звезду»
6
Из выражения следует, что регулирование скорости
двигателя обеспечивается изменением f1
6
Из выражения следует, что регулирование скорости
двигателя обеспечивается изменением f1
7
При регулировании скорости вращения АД изменением частоты f1 изменяется и
7
При регулировании скорости вращения АД изменением частоты f1 изменяется и
8
Перегрузочная способность будет неизменной,
если отношение
во всех режимах (3)
,
где, (пренебрегаем
8
Перегрузочная способность будет неизменной,
если отношение
во всех режимах (3)
,
где, (пренебрегаем
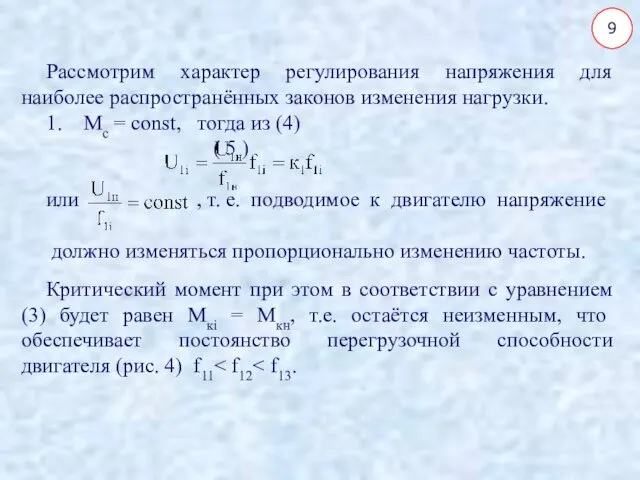
Рассмотрим характер регулирования напряжения для наиболее распространённых законов изменения нагрузки.
1. Mc
Рассмотрим характер регулирования напряжения для наиболее распространённых законов изменения нагрузки.
1. Mc
10
Если пренебречь падением напряжения ΔU1 в обмотке статора двигателя, то
10
Если пренебречь падением напряжения ΔU1 в обмотке статора двигателя, то
11
Если нарушить это условие, т.е. при U1 = const изменить только
11
Если нарушить это условие, т.е. при U1 = const изменить только
12
тогда из (4) , (6) ,
откуда следует, что подводимое напряжение
12
тогда из (4) , (6) ,
откуда следует, что подводимое напряжение
13
13
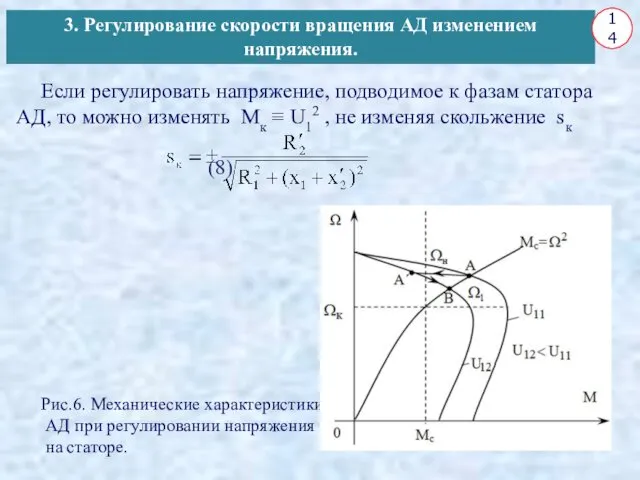
Если регулировать напряжение, подводимое к фазам статора АД, то можно
Если регулировать напряжение, подводимое к фазам статора АД, то можно
 Определенный интеграл. Основные свойства и теоремы. Формула Ньютона-Лейбница. (Семинар 17)
Определенный интеграл. Основные свойства и теоремы. Формула Ньютона-Лейбница. (Семинар 17) Технология производства жидкого дыма
Технология производства жидкого дыма Базовые логические элементы ЭВМ
Базовые логические элементы ЭВМ Презентация Театральный центр
Презентация Театральный центр P770 disassembly guide
P770 disassembly guide Bilingualismus
Bilingualismus Сахарный диабет. Неврологические осложнения
Сахарный диабет. Неврологические осложнения Расчет больших заказов. Как не попасть с хорошим заказом
Расчет больших заказов. Как не попасть с хорошим заказом Планы второго порядка. Композиционные планы Бокса-Уилсона
Планы второго порядка. Композиционные планы Бокса-Уилсона 20230923_protsessy_odnokletochnyh
20230923_protsessy_odnokletochnyh Как сделать Вазу с цветами
Как сделать Вазу с цветами Сценарий внеклассного мероприятия посвященного Дню Матери.
Сценарий внеклассного мероприятия посвященного Дню Матери. Костюм эпохи Возрождения
Костюм эпохи Возрождения Презентация Все профессии нужны, все профессии важны!
Презентация Все профессии нужны, все профессии важны! Проект Здоровей-ка (Фрагменты)
Проект Здоровей-ка (Фрагменты) Животные Красной книги Нижегородской области
Животные Красной книги Нижегородской области Схема оценки нервно-психического развития ребенка до 1 года
Схема оценки нервно-психического развития ребенка до 1 года Конституция РФ
Конституция РФ Виды сталей и их термическая обработка для изготовления изделий
Виды сталей и их термическая обработка для изготовления изделий Генетическая связь классов соединений
Генетическая связь классов соединений Ива́н Константи́нович Айвазо́вский
Ива́н Константи́нович Айвазо́вский класс. Сфера духовной культуры
класс. Сфера духовной культуры Кровотечение и методы его остановки
Кровотечение и методы его остановки презентацияАзбука нравственности
презентацияАзбука нравственности Презентация .Школа гражданского мужества гимназистов СЛАВИЯ
Презентация .Школа гражданского мужества гимназистов СЛАВИЯ Фотоальбом
Фотоальбом Проектная деятельность. Подготовка проекта
Проектная деятельность. Подготовка проекта Развитие технических и художественных навыков на начальном этапе обучения в классе баяна
Развитие технических и художественных навыков на начальном этапе обучения в классе баяна