- Планы второго порядка. Композиционные планы Бокса-Уилсона

Содержание
- 2. Линейная математическая модель, описывающая зависимость отклика «у» от факторов xj довольно часто оказывается неадекватной эксперименту. В
- 3. Число коэффициентов l в полиноме второго порядка l = k+ 1 +k + C2k (2) ,
- 4. Если факторов всего два, т.е. две переменных на трех уровнях, то число опытов N = 32
- 5. Форма матрицы планирования ПФЭ 32
- 6. Форма матрицы планирования ПФЭ 32 приведена в таблице
- 7. Матрица ПФЭ 33 состоит из 27 опытов геометрический образ – куб; планируемые точки расположены в его
- 8. ПФЭ, начиная с k = 3 имеет избыточное количество опытов, намного превышающее число определяемых коэффициентов уже
- 9. Сократить число опытов можно, если воспользоваться так называемым композиционным или последовательным планом, предложенным Боксом и Уилсоном.
- 10. ПФЭ 2k или его полуреплика дополняются определенным числом так называемых «звездных точек», расположенных на координатных осях
- 11. Число опытов в матрице композиционного плана второго порядка при k факторах составляет NB = 2k +
- 12. Геометрический образ плана второго порядка для k = 2: Значение α выбирается определенным образом в зависимости
- 13. Матрица планирования композиционного плана второго порядка
- 14. Если k = 3, Nb = 23 +2·3 + 1 = 15 k = 4, Nb
- 15. композиционные планы второго порядка неортогональны:
- 16. Композиционные планы приводятся к ортогональному виду выбором соответствующего звездного плеча α. в зависимости от числа опытов
- 17. Значения α2 для различного числа факторов и количества опытов в центре плана * - для k
- 18. Выбрав α из таблицы и проведя следующее линейное преобразование квадратичных столбцов xj2 получим ортогональную матрицу
- 19. Построим ортогональный план второго порядка для k= 2 и n0 = 1. В отличие от ранее
- 20. Ортогональный план второго порядка для k = 2
- 21. Другой вариант построения
- 22. для трех факторов
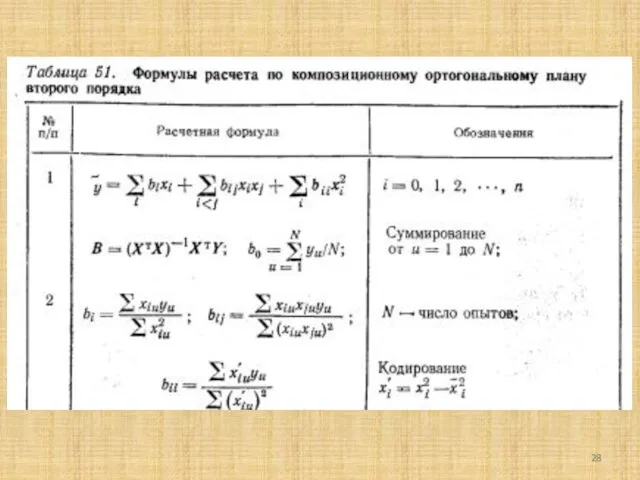
- 23. Благодаря ортогональности матрицы планирования, все коэффициенты модели определяются независимо друг от друга по формуле Дисперсии коэффициентов
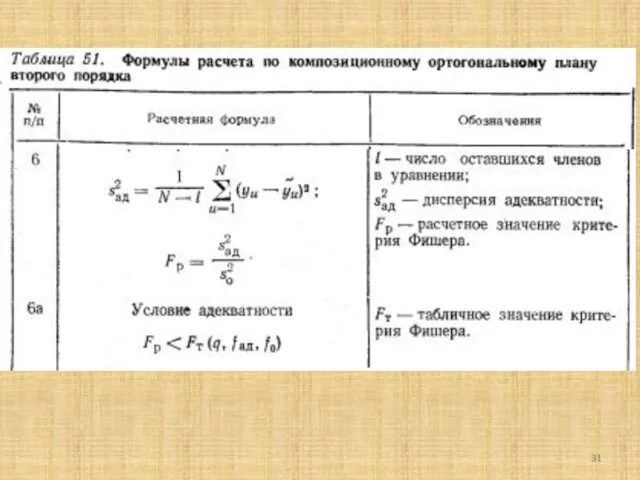
- 24. В результате расчетов по матрице с преобразованными столбцами для квадратичных эффектов получим уравнение
- 25. Чтобы перейти к обычной записи, определяют b0 по формуле После замены b0' на b0 (без штриха)
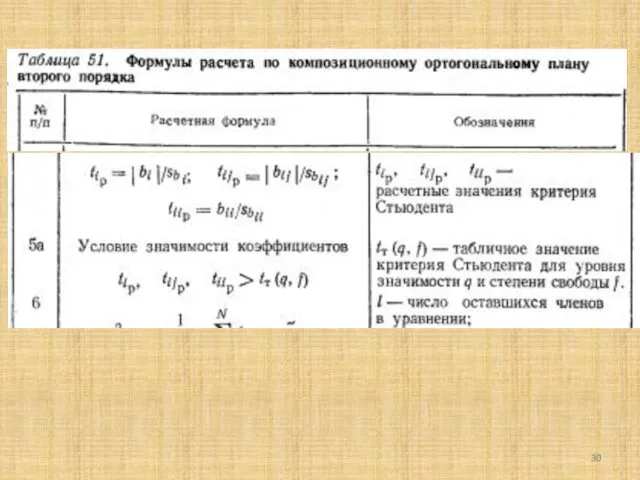
- 26. Хотя формулы для определения дисперсий коэффициентов в общем виде выглядят одинаково однако для разных столбцов матрицы
- 27. Ортогональные планы второго порядка не обладают свойством рототабельности, т.к. на равных расстояниях от центра плана дисперсия
- 32. Принятие решений по планам второго порядка Нелинейная модель адекватна. Если целью было получение интерполяционной модели (описывающей
- 34. Скачать презентацию
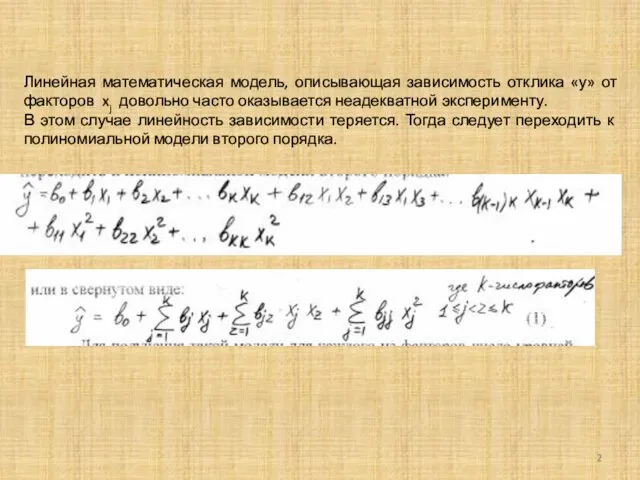
Линейная математическая модель, описывающая зависимость отклика «у» от факторов xj довольно
Линейная математическая модель, описывающая зависимость отклика «у» от факторов xj довольно
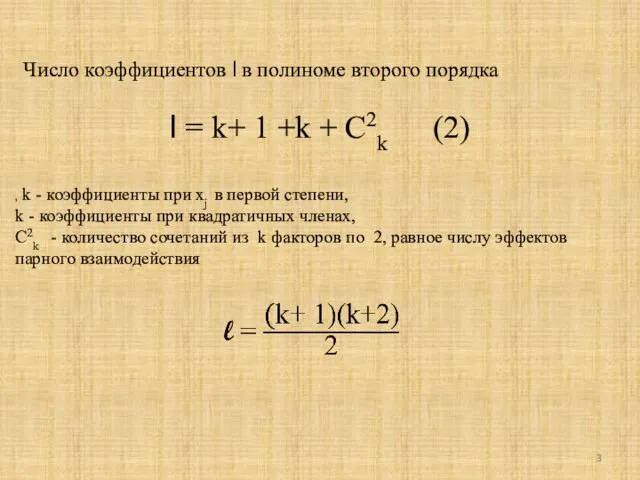
Число коэффициентов l в полиноме второго порядка
l = k+ 1
Число коэффициентов l в полиноме второго порядка
l = k+ 1
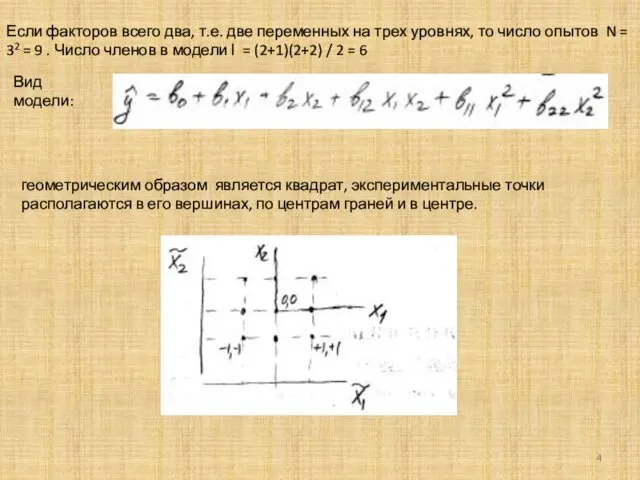
Если факторов всего два, т.е. две переменных на трех уровнях, то
Если факторов всего два, т.е. две переменных на трех уровнях, то
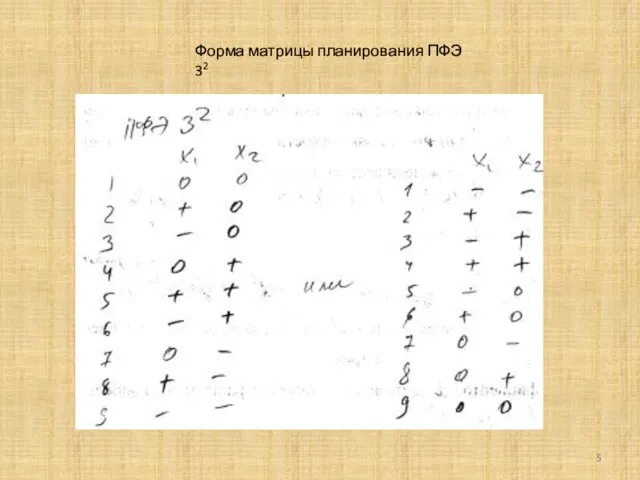
Форма матрицы планирования ПФЭ 32
Форма матрицы планирования ПФЭ 32
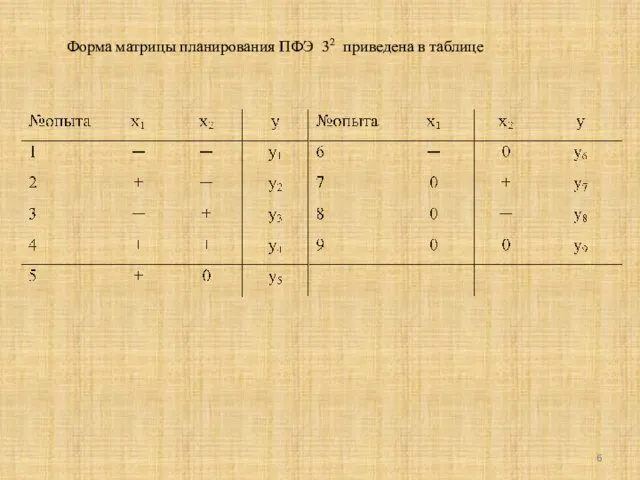
Форма матрицы планирования ПФЭ 32 приведена в таблице
Форма матрицы планирования ПФЭ 32 приведена в таблице
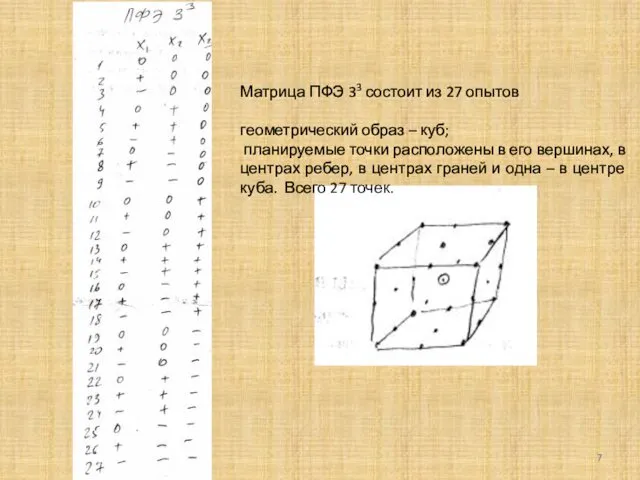
Матрица ПФЭ 33 состоит из 27 опытов
геометрический образ – куб;
планируемые
Матрица ПФЭ 33 состоит из 27 опытов
геометрический образ – куб;
планируемые
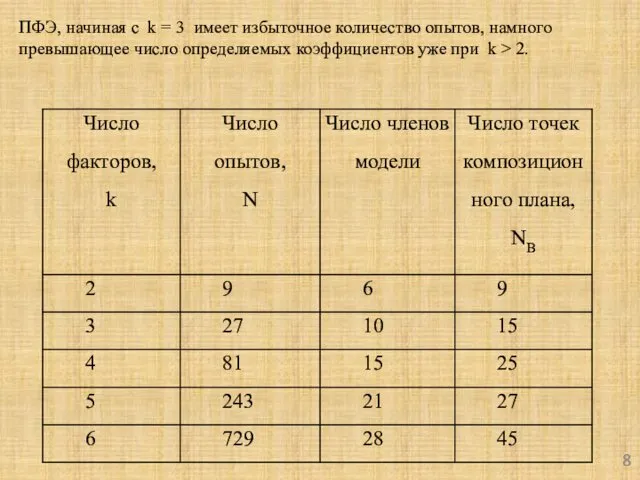
ПФЭ, начиная с k = 3 имеет избыточное количество опытов, намного
ПФЭ, начиная с k = 3 имеет избыточное количество опытов, намного
Сократить число опытов можно, если воспользоваться так называемым композиционным или последовательным
Сократить число опытов можно, если воспользоваться так называемым композиционным или последовательным
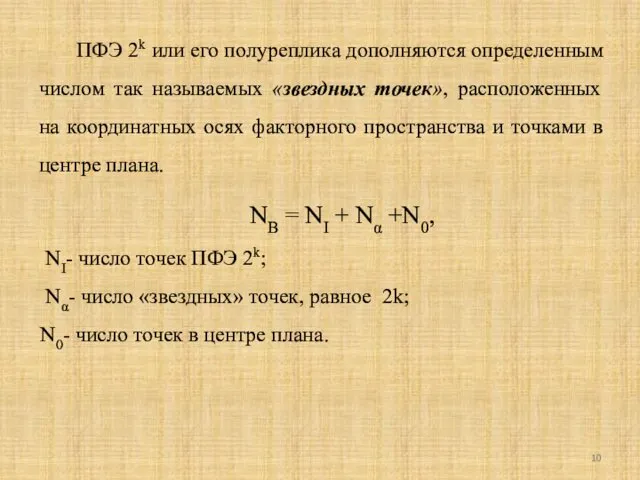
ПФЭ 2k или его полуреплика дополняются определенным числом так называемых «звездных
ПФЭ 2k или его полуреплика дополняются определенным числом так называемых «звездных
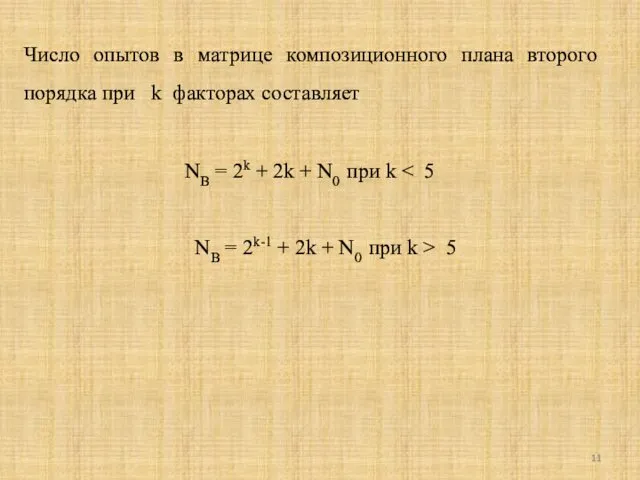
Число опытов в матрице композиционного плана второго порядка при k факторах
Число опытов в матрице композиционного плана второго порядка при k факторах
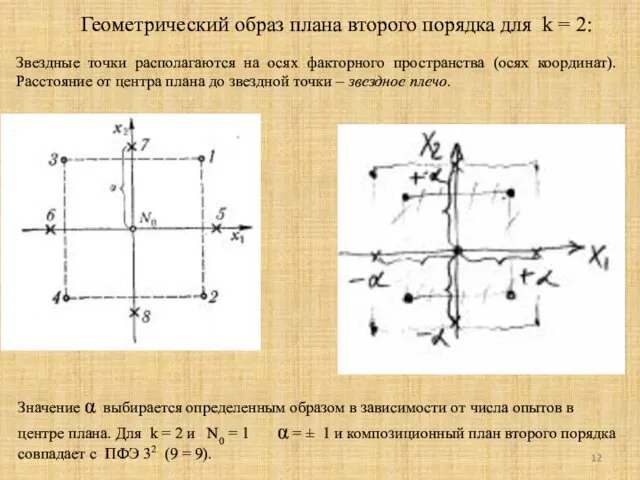
Геометрический образ плана второго порядка для k = 2:
Значение α выбирается
Геометрический образ плана второго порядка для k = 2:
Значение α выбирается

Матрица планирования композиционного плана второго порядка
Матрица планирования композиционного плана второго порядка
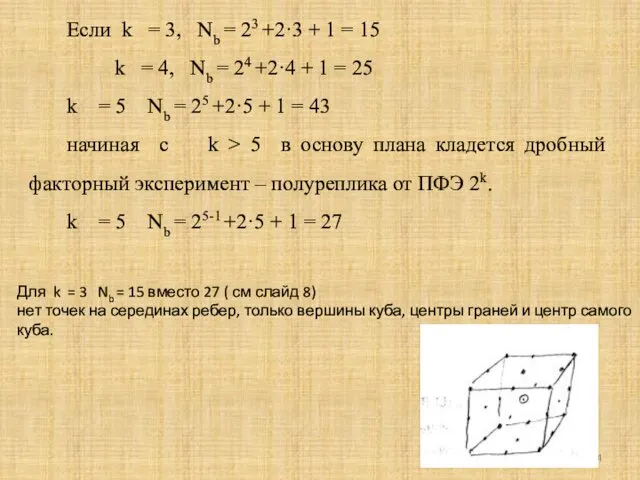
Если k = 3, Nb = 23 +2·3 + 1 =
Если k = 3, Nb = 23 +2·3 + 1 =
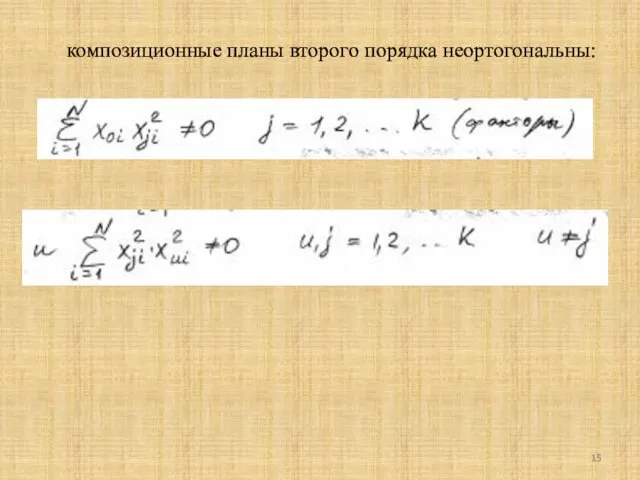
композиционные планы второго порядка неортогональны:
композиционные планы второго порядка неортогональны:
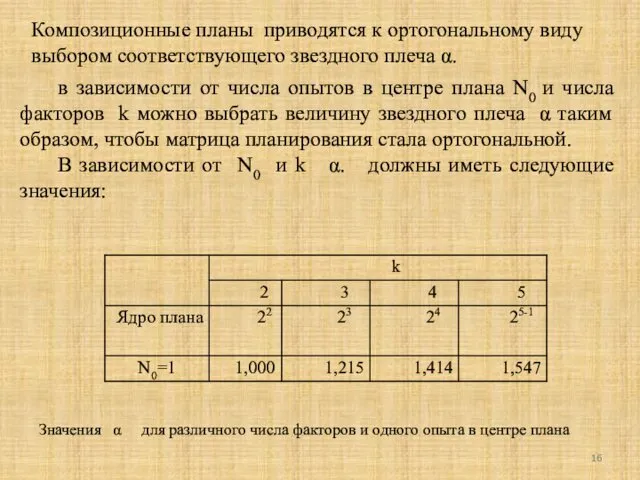
Композиционные планы приводятся к ортогональному виду выбором соответствующего звездного плеча α.
Композиционные планы приводятся к ортогональному виду выбором соответствующего звездного плеча α.
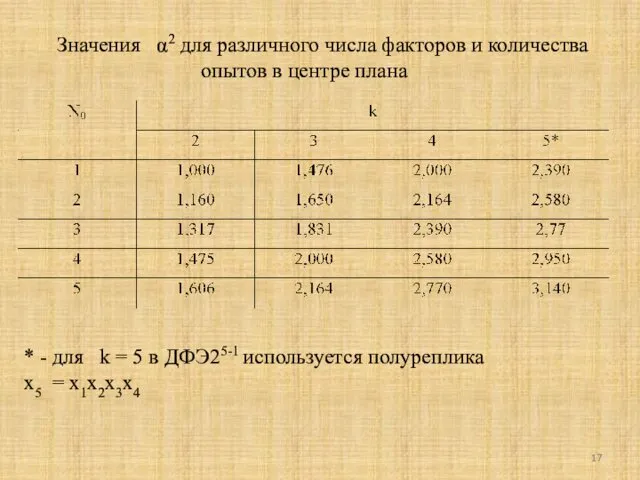
Значения α2 для различного числа факторов и количества опытов в центре
Значения α2 для различного числа факторов и количества опытов в центре
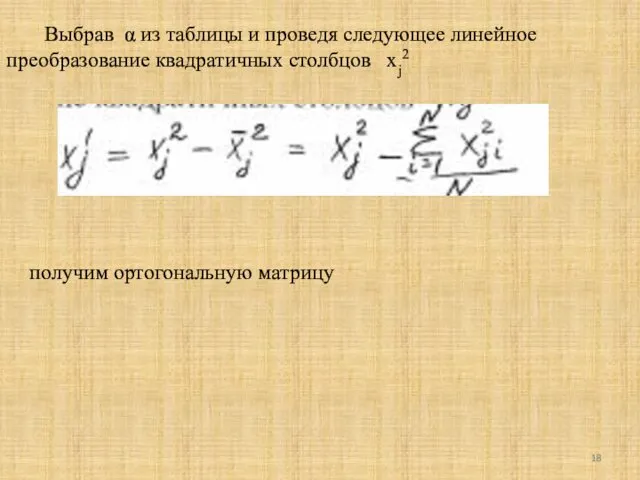
Выбрав α из таблицы и проведя следующее линейное преобразование квадратичных столбцов
Выбрав α из таблицы и проведя следующее линейное преобразование квадратичных столбцов
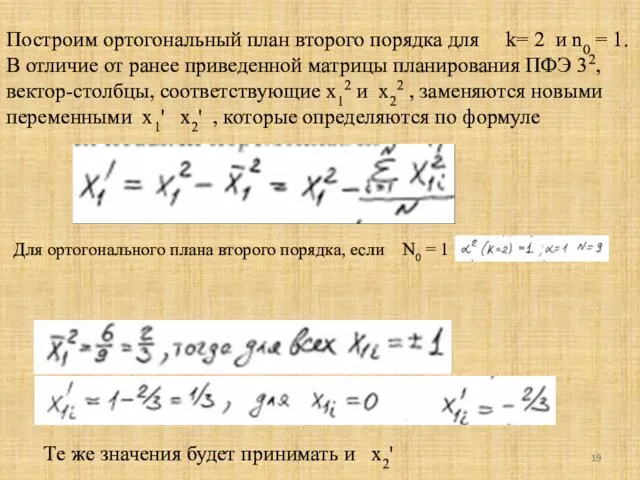
Построим ортогональный план второго порядка для k= 2 и n0 =
Построим ортогональный план второго порядка для k= 2 и n0 =
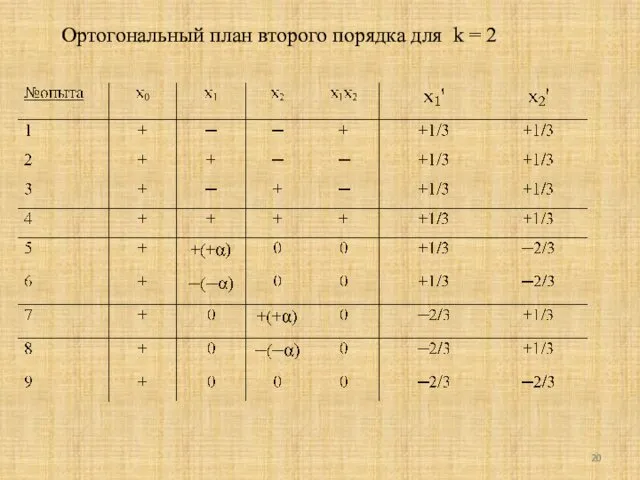
Ортогональный план второго порядка для k = 2
Ортогональный план второго порядка для k = 2
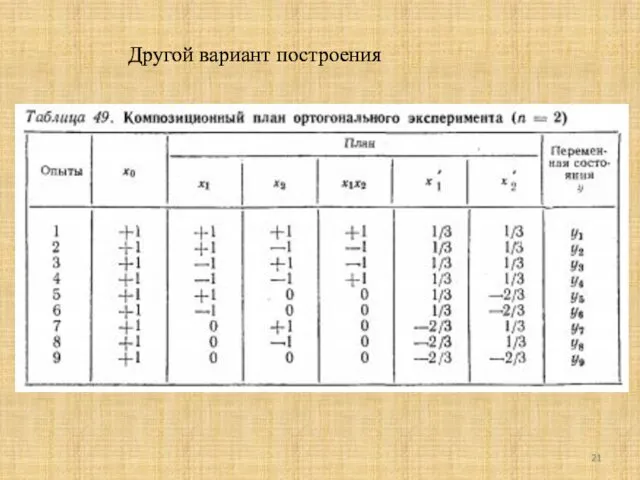
Другой вариант построения
Другой вариант построения
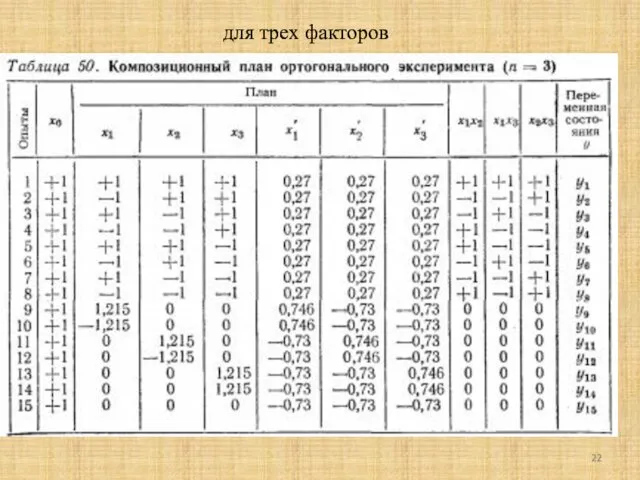
для трех факторов
для трех факторов
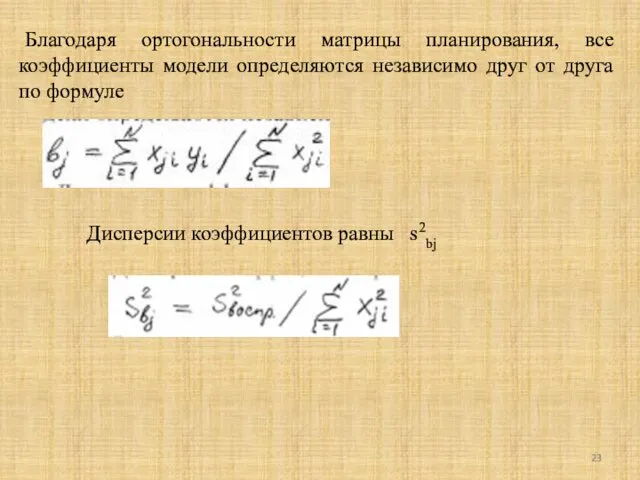
Благодаря ортогональности матрицы планирования, все коэффициенты модели определяются независимо друг от
Благодаря ортогональности матрицы планирования, все коэффициенты модели определяются независимо друг от
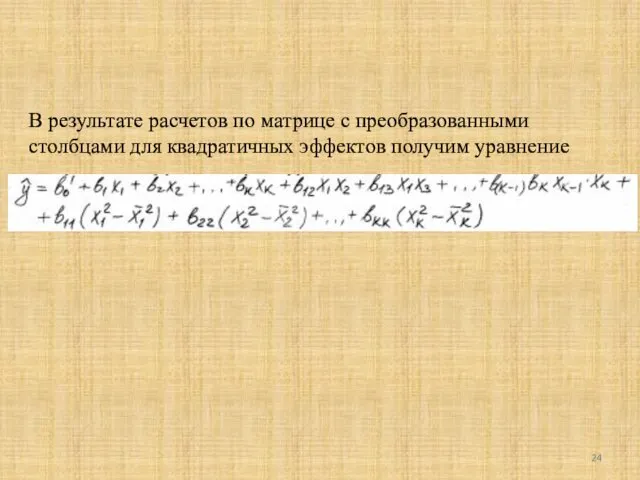
В результате расчетов по матрице с преобразованными столбцами для квадратичных эффектов
В результате расчетов по матрице с преобразованными столбцами для квадратичных эффектов
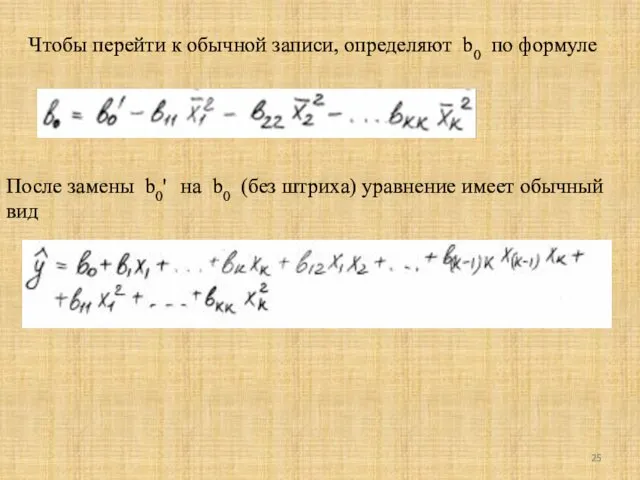
Чтобы перейти к обычной записи, определяют b0 по формуле
После замены b0'
Чтобы перейти к обычной записи, определяют b0 по формуле
После замены b0'
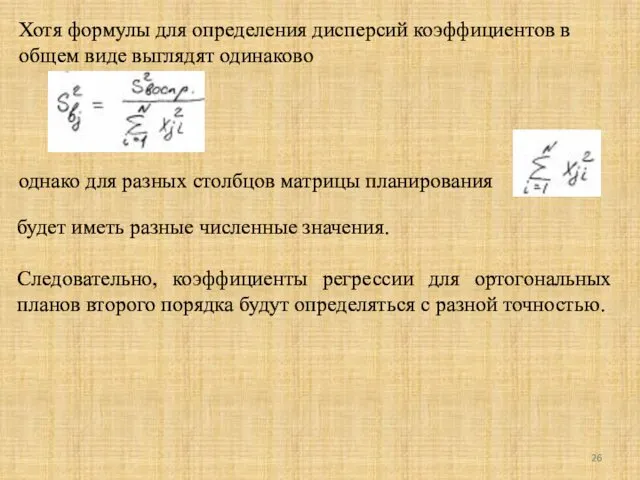
Хотя формулы для определения дисперсий коэффициентов в общем виде выглядят одинаково
однако
Хотя формулы для определения дисперсий коэффициентов в общем виде выглядят одинаково
однако
Ортогональные планы второго порядка не обладают свойством рототабельности, т.к. на равных
Ортогональные планы второго порядка не обладают свойством рототабельности, т.к. на равных

Принятие решений по планам второго порядка
Нелинейная модель адекватна. Если целью было
Принятие решений по планам второго порядка
Нелинейная модель адекватна. Если целью было
 Организация хирургической стоматологической помощи населению
Организация хирургической стоматологической помощи населению Общие сведения о самолёте МиГ-29 и его силовой установке
Общие сведения о самолёте МиГ-29 и его силовой установке Неблагоприятные факторы, влияющие на численность животных
Неблагоприятные факторы, влияющие на численность животных Презентация Влияние толерантности и правовой культуры на нравственное воспитание дошкольников
Презентация Влияние толерантности и правовой культуры на нравственное воспитание дошкольников 20231010_prezentatsiya_k_uroku
20231010_prezentatsiya_k_uroku Дорожные знаки для пешеходов
Дорожные знаки для пешеходов Города на старых водных торговых путях
Города на старых водных торговых путях Главные праздники в различных религиях
Главные праздники в различных религиях Текстура деформации
Текстура деформации Синхронные машины. Лекция №10
Синхронные машины. Лекция №10 Сервисные комплексы
Сервисные комплексы Подборка и анализ поселков численностью 2000 человек
Подборка и анализ поселков численностью 2000 человек Семинар Талант и гениальность
Семинар Талант и гениальность Человек и Бог в православии
Человек и Бог в православии Урок логопеда для учащихся 3 класса по теме Звуки З и С
Урок логопеда для учащихся 3 класса по теме Звуки З и С Цель и задачи пропедевтики внутренних болезней. Лекция №1
Цель и задачи пропедевтики внутренних болезней. Лекция №1 Архитектурное проектирование общественных зданий. Лекция 6
Архитектурное проектирование общественных зданий. Лекция 6 Маркетинговые возможности спортивных сооружений
Маркетинговые возможности спортивных сооружений Масленица
Масленица Шаблоны презентаций - 14
Шаблоны презентаций - 14 Урок по географии Реки России
Урок по географии Реки России ЭЛОУ-АТ-6 (блок ЭЛОУ). Электродегидратор
ЭЛОУ-АТ-6 (блок ЭЛОУ). Электродегидратор Ознакомительный тест Углеводы. Моносахариды
Ознакомительный тест Углеводы. Моносахариды Общие положения о договоре
Общие положения о договоре Презентация к уроку технология 4 класс с творческими проектами детей. Тема Дизайн календаря
Презентация к уроку технология 4 класс с творческими проектами детей. Тема Дизайн календаря Основные нормы ПС
Основные нормы ПС Инженерный анализ методом конечных элементов. Работа со сборками. Задание контактов
Инженерный анализ методом конечных элементов. Работа со сборками. Задание контактов Природа человека. Цель и смысл жизни человека
Природа человека. Цель и смысл жизни человека