- Reinforcement learning of fuzzy logic controllers

Содержание
- 2. What is fuzzy logic?
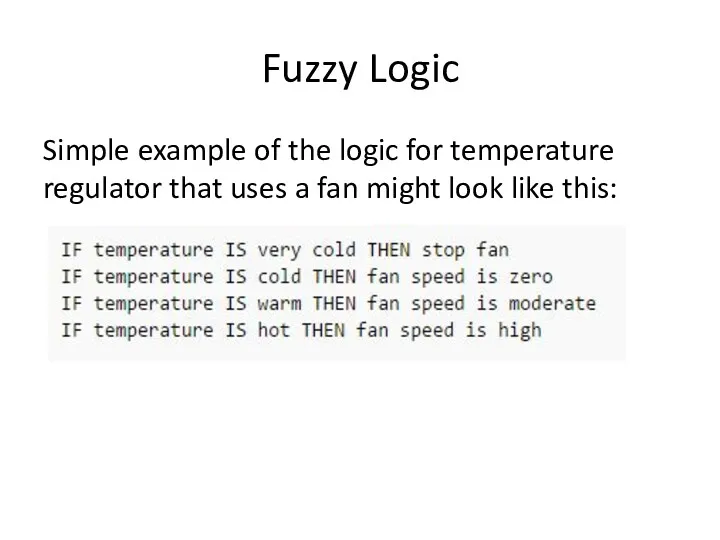
- 3. Fuzzy Logic Simple example of the logic for temperature regulator that uses a fan might look
- 5. Example of rules:
- 10. There are three types of scheme: FLC – Fuzzy Logic Controllers NN – Neural Networks RL
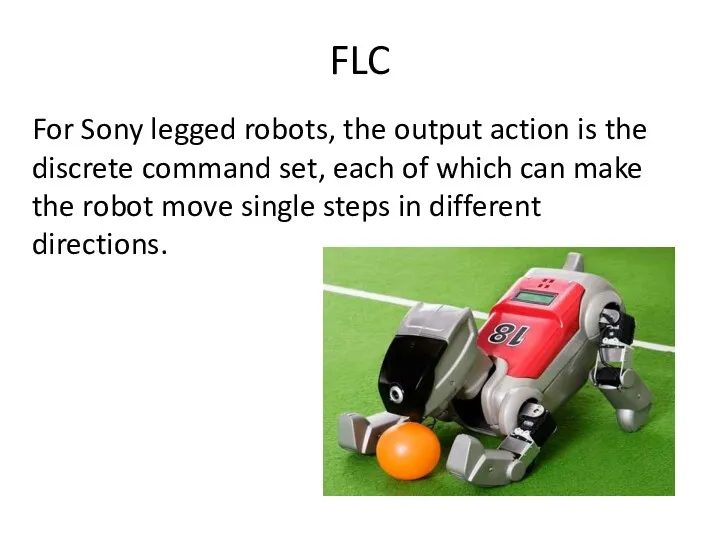
- 11. FLC For Sony legged robots, the output action is the discrete command set, each of which
- 12. A reactive control scheme is employed for Sony legged robots to approach the ball in a
- 13. The input state vector is S = [s1, s2]T = [θ, d]T. This behavior is to
- 14. We define F(j, n) as the j-th fuzzy set (j=1…ln) and ln the number of fuzzy
- 15. Experimental results The experimental results show the FLC can be learned by the proposed reinforcement learning
- 17. Скачать презентацию

What is fuzzy logic?
What is fuzzy logic?
Fuzzy Logic
Simple example of the logic for temperature regulator that uses
Fuzzy Logic
Simple example of the logic for temperature regulator that uses

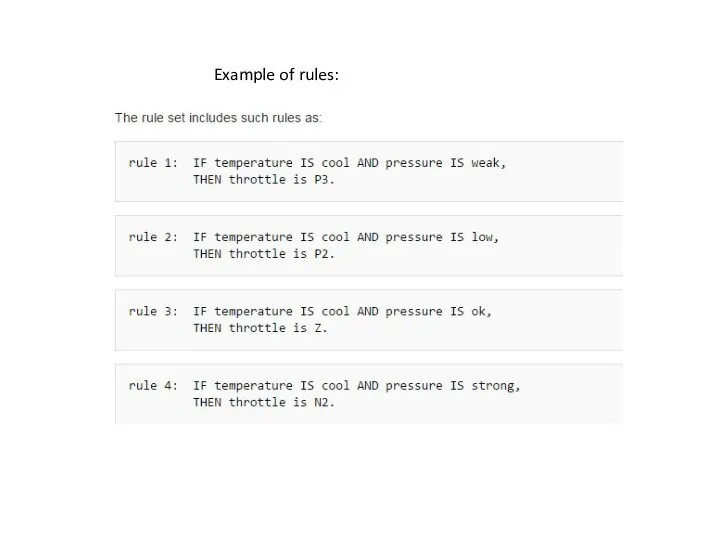
Example of rules:
Example of rules:



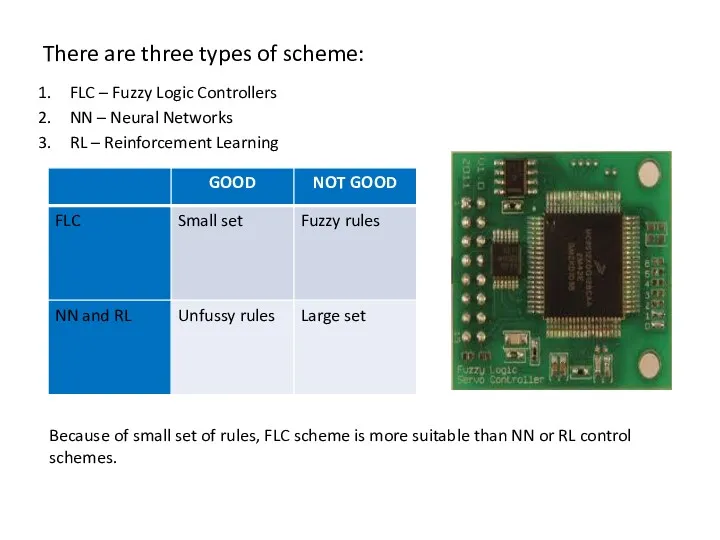
There are three types of scheme:
FLC – Fuzzy Logic Controllers
There are three types of scheme:
FLC – Fuzzy Logic Controllers
FLC
For Sony legged robots, the output action is the discrete command
FLC
For Sony legged robots, the output action is the discrete command

A reactive control scheme is employed for Sony legged robots to
A reactive control scheme is employed for Sony legged robots to
![The input state vector is S = [s1, s2]T =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/203976/slide-12.jpg)
The input state vector is S = [s1, s2]T = [θ,
The input state vector is S = [s1, s2]T = [θ,
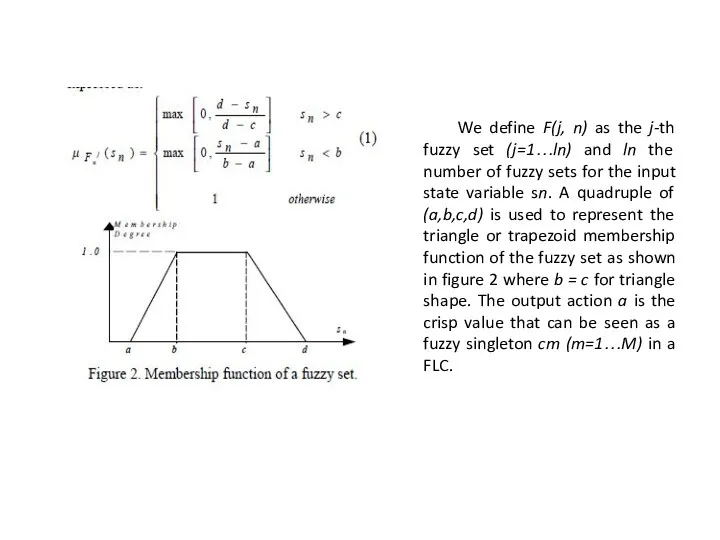
We define F(j, n) as the j-th fuzzy set (j=1…ln)
We define F(j, n) as the j-th fuzzy set (j=1…ln)

Experimental results
The experimental results show the FLC can be learned by
Experimental results
The experimental results show the FLC can be learned by
 Интернет - ресурсы в работе учителя как один из способов повышения педагогического мастерства
Интернет - ресурсы в работе учителя как один из способов повышения педагогического мастерства Информационные процессы
Информационные процессы Здравствуй солнышко!
Здравствуй солнышко! Чудо, явленное взору… подготовка к сочинению по картине Осенний день. Сокольники. И.И. Левитан
Чудо, явленное взору… подготовка к сочинению по картине Осенний день. Сокольники. И.И. Левитан Тема урока 6 класс
Тема урока 6 класс Катализ в химической технологии
Катализ в химической технологии Подпорные стены и сооружения
Подпорные стены и сооружения Исследовательская работа 1 класс
Исследовательская работа 1 класс Адаптация учащихся 1а класса
Адаптация учащихся 1а класса Артикуляционная гимнастика
Артикуляционная гимнастика Избирательная система в РФ
Избирательная система в РФ Программа: Детские классы
Программа: Детские классы Актуальные проблемы изучения математики
Актуальные проблемы изучения математики Мультимедийные технологии
Мультимедийные технологии Использование фольклорной игры в развитии речи детей среднего дошкольного возраста.
Использование фольклорной игры в развитии речи детей среднего дошкольного возраста. Ввод и вывод в MATLAB
Ввод и вывод в MATLAB Благоустройство территории района Богородское города Москвы в 2020 г
Благоустройство территории района Богородское города Москвы в 2020 г Международное антитеррористическое право
Международное антитеррористическое право Специальность 23.02.04 Техническая эксплуатация подъемно-транспортных, строительных, дорожных машин и оборудования
Специальность 23.02.04 Техническая эксплуатация подъемно-транспортных, строительных, дорожных машин и оборудования Презентация Развитие творческих способностей детей среднего дошкольного возраста средствами изобразительной деятельности и познавательно – речевого развития воспитанников
Презентация Развитие творческих способностей детей среднего дошкольного возраста средствами изобразительной деятельности и познавательно – речевого развития воспитанников 9 класс. Электив. Уравнения с модулем -3.
9 класс. Электив. Уравнения с модулем -3. Landfill. Gas collection and utilization system
Landfill. Gas collection and utilization system Приемы активного и пассивного слушания
Приемы активного и пассивного слушания Основы рационального питания. Понятие о пищевом статусе
Основы рационального питания. Понятие о пищевом статусе История компьютеров. Классификация компьютеров. Тенденции развития компьютеров
История компьютеров. Классификация компьютеров. Тенденции развития компьютеров философия
философия НАША ГРУППА
НАША ГРУППА Fruit Fiesta. Бриф на редизайн
Fruit Fiesta. Бриф на редизайн