Слайд 2

Слайд 3
Робототехника – отрасль машиностроения, занимающееся разработкой, созданием, эксплуатацией машин и
устройств, запрограммированных на самостоятельное выполнение конкретных задач.
В зависимости от целей и области применения различают различные виды робототехники: космическая, бытовая, промышленная, медицинская и т.д.
Первые механические устройства создавались еще в Древнем мире (летающий деревянный голубь, жестикулирующая статуя и т.д.). Однако действительно выдающиеся достижения в робототехнике были достигнуты в 20-м веке. Первые роботы в современном понимании были созданы 1950-х годах, когда американские ученые представили первого программируемого робота, на сборочной линии в General Motors.
Сегодня понятие робототехники близко к понятиям искусственный интеллект, машинное обучение.
Термин «робототехника» впервые был упомянут американским писателем в 1941 году в рассказе. А само слово «робот» придумал чешский писатель
К. Чапек в 1920 году.
Слайд 4
КЛАССИФИКАЦИЯ
По сфере основного применения можно выделить промышленных роботов, исследовательских роботов,
роботов, используемых в обучении, специальных роботов.
Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы.
Манипуляционный робот — автоматическая машина, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций.
Мобильный робот — автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колёсными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы).
Слайд 5
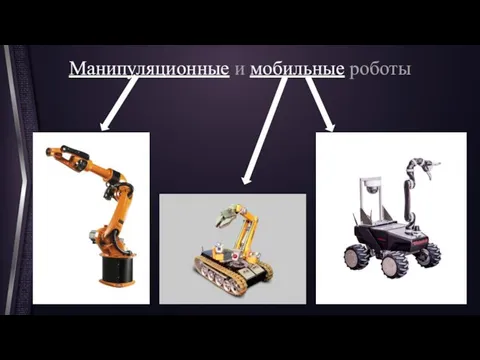
Манипуляционные и мобильные роботы
Слайд 6
Основные компоненты роботов
Приводы: это «мышцы» роботов. В настоящее время самыми
популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества, жидкости или сжатый воздух.
Двигатели постоянного тока: электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
Шаговые электродвигатели часто применяют в качестве привода для роботов, из за того, что они не требуют датчиков обратной связи для регулирования положений звеньев.
Воздушные мышцы: простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины.
Электро-активные полимеры — это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. А также датчики: касания, освещённости, датчик-гироскоп, расстояния, эхолот и многие другие.
Слайд 7

Способы перемещения
Колёсные Гусеничные Шагающие Ползающие
Слайд 8
Области применения
Авиация и роботы
Роботизированные пилоты - призваны заменить летчиков, способны управлять
любым типом летательного аппарата (авто-пилотники).
Автомобили и роботы
Роботизированные автомобили, робомобили. Автоматизированные наземные транспортные средства (Тесла).
Дезинфекция помещений и роботы
Роботы, предназначенные для автоматизации плановой или экстренной дезинфекции в помещениях, где присутствие вирусов и бактерий нежелательно.
Экстремальная робототехника
Роботы, предназначенные для работы в экстремальных условиях, например, при высоких температурах, при сверхнизких температурах или в большом температурном диапазоне.
Атомная промышленность и робототехника
Для работы на атомных электростанциях, а также на предприятиях атомной промышленности, например, на предприятиях, занятых производством урана.
Слайд 9

Слайд 10
Интересные факты о роботах
Самый маленький робот, длина которого составляет всего
1см, весом в 1,5 грамма, сконструировали в Японии в компании Seiko Epson.
Сегодня роботы способны играть в шахматы. Чемпион мира Гарри Каспаров проиграл в шахматном поединке роботу.
Существует ежегодный турнир роботов по футболу по упрощенным правилам.
На конференции в Эр-Рияде 26 октября 2017 года роботу по имени София было предоставлено гражданство этой страны.
В США ведутся серьезные исследования, связанные с глобальным риском создания искусственного сверхчеловека.
Еще Леонардо да Винчи упоминал и рисовал «механических рыцарей» по его работам в 1945 году НАСА создало робота.
Пожилой австралиец, возраст которого был за 80 лет, покончил с собой при помощи робота в 2008 году. Он сам сконструировал своего убийцу по схемам, которые взял из интернета.
Слайд 11
Заключение
Проведенный анализ современного состояния данной сферы показывает, что:
- Современные прикладные
методы и технологии искусственного интеллекта можно использовать для роботов;
- Существующие среды для моделирования устройств робототехники достаточно удобные для использования и для проведения моделирования.
И что данная область технологии только поверхностно проявила свои способности, и всё, что было спроектировано, смоделировано является лишь незначимой частью всего, чего должно ожидать человечество в ближайшие десятилетия.

 Oптимизация режима бурения
Oптимизация режима бурения Назначение, устройство и принцип действия видеокарты
Назначение, устройство и принцип действия видеокарты Волонтеры
Волонтеры Исследование упругих деформаций нежестких стенок деталей из титановых сплавов
Исследование упругих деформаций нежестких стенок деталей из титановых сплавов Результаты тестирования. Основы государственной культурной политики Российской Федерации
Результаты тестирования. Основы государственной культурной политики Российской Федерации Można tak. Ale można też tak
Można tak. Ale można też tak Обработка браузерных событий в JS
Обработка браузерных событий в JS Нужна ли математика в парикмахерской. Примеры жизненных ситуаций, в которых необходимо применение математики
Нужна ли математика в парикмахерской. Примеры жизненных ситуаций, в которых необходимо применение математики Техника безопасности на уроках физической культуры
Техника безопасности на уроках физической культуры Классификация полимеров по способу получения
Классификация полимеров по способу получения Фёдор Иванович Тютчев
Фёдор Иванович Тютчев Театрализованные игры как средство личностного развития дошкольника
Театрализованные игры как средство личностного развития дошкольника Bars-prodaction
Bars-prodaction С новым Годом, друзья!
С новым Годом, друзья! Единая Россия. Как зарегистрироваться для участия в электронном предварительном голосовании через госуслуги
Единая Россия. Как зарегистрироваться для участия в электронном предварительном голосовании через госуслуги Проект Моделирование биологических процессов в программе Excel
Проект Моделирование биологических процессов в программе Excel Бессер-Строй. Строительство коттеджей в Уфе и Республике Башкортостан
Бессер-Строй. Строительство коттеджей в Уфе и Республике Башкортостан Интерактивная игра. Технология
Интерактивная игра. Технология Робота вузлів пристрою управління каналом (ПК) (Заняття № 7.10)
Робота вузлів пристрою управління каналом (ПК) (Заняття № 7.10) Артикуляционная гимнастика для дошкольников. Мастер-класс
Артикуляционная гимнастика для дошкольников. Мастер-класс Место и роль профсоюза в системе субъектов трудового права
Место и роль профсоюза в системе субъектов трудового права Система российского права.Законотворческий процесс в РФ
Система российского права.Законотворческий процесс в РФ презентация по географии 10 класс Ватикан
презентация по географии 10 класс Ватикан Педагогический проект на тему: Формирование культурно-гигиенических навыков у детей младшего дошкольного возраста
Педагогический проект на тему: Формирование культурно-гигиенических навыков у детей младшего дошкольного возраста Решение задачи с помощью уравнения
Решение задачи с помощью уравнения Творческий коррекционно-развивающий проект Курочка Ряба и Колобок
Творческий коррекционно-развивающий проект Курочка Ряба и Колобок Введение инноваций в ДОУ на основе метода проектов.
Введение инноваций в ДОУ на основе метода проектов. 75-летие Великой Отечественной Войны
75-летие Великой Отечественной Войны