- Робототехника. Повороты робота на месте. Независимое управление моторами

Содержание
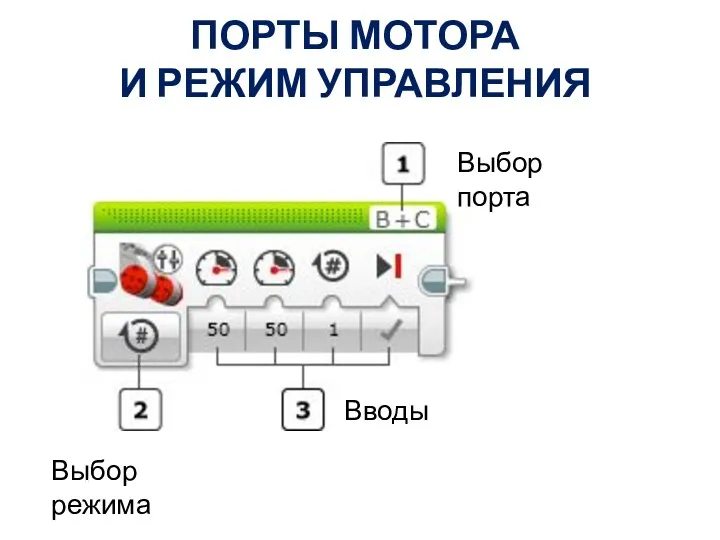
- 2. ПОРТЫ МОТОРА И РЕЖИМ УПРАВЛЕНИЯ Выбор порта Выбор режима Вводы
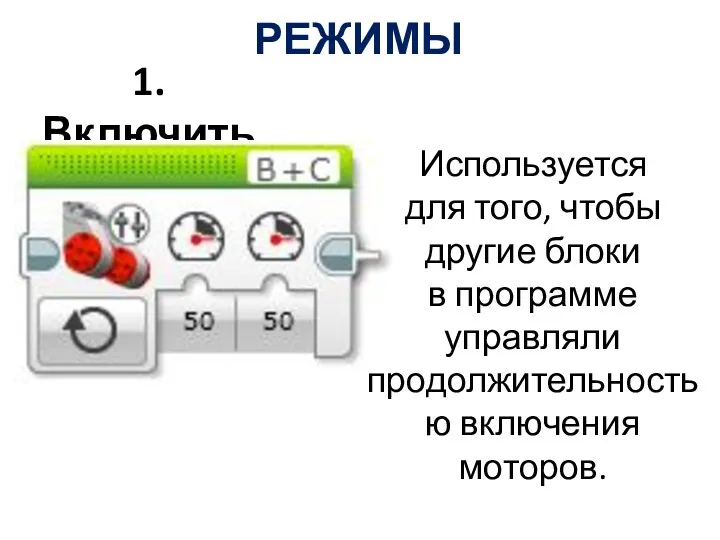
- 3. РЕЖИМЫ 1. Включить Используется для того, чтобы другие блоки в программе управляли продолжительностью включения моторов.
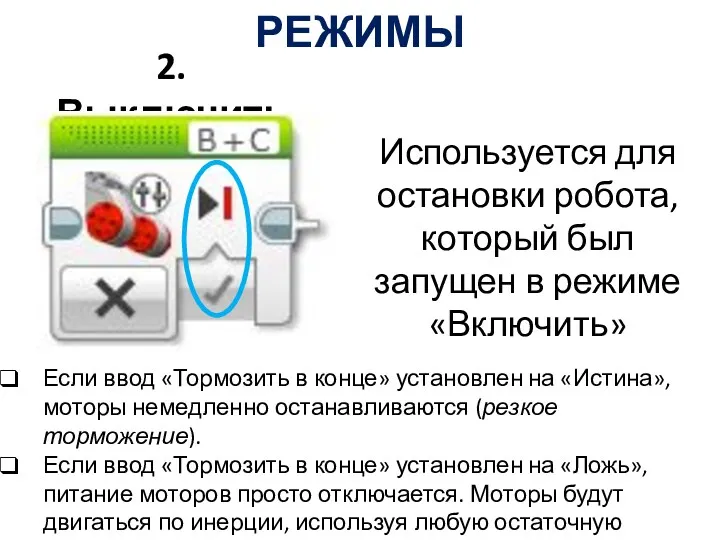
- 4. РЕЖИМЫ 2.Выключить Используется для остановки робота, который был запущен в режиме «Включить» Если ввод «Тормозить в
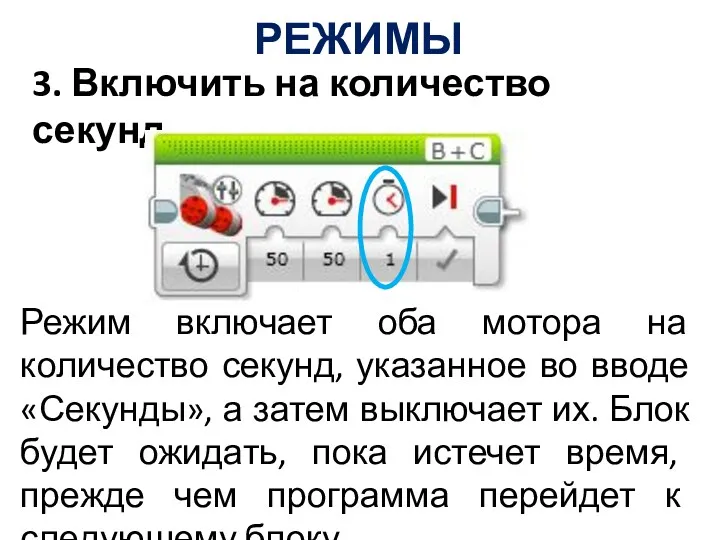
- 5. РЕЖИМЫ 3. Включить на количество секунд Режим включает оба мотора на количество секунд, указанное во вводе
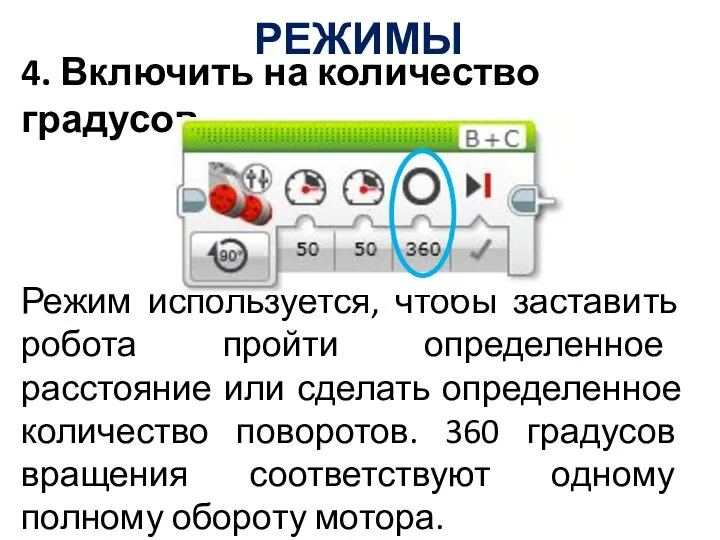
- 6. РЕЖИМЫ 4. Включить на количество градусов Режим используется, чтобы заставить робота пройти определенное расстояние или сделать
- 7. Программа заставит робота двигаться прямо вперед с мощностью 75, пока моторы не сделают поворот на 900
- 8. Программа заставит робота повернуть в арку направо, потому что значение «Мощность на левый мотор» больше значения
- 10. Скачать презентацию
ПОРТЫ МОТОРА
И РЕЖИМ УПРАВЛЕНИЯ
Выбор порта
Выбор режима
Вводы
ПОРТЫ МОТОРА
И РЕЖИМ УПРАВЛЕНИЯ
Выбор порта
Выбор режима
Вводы
РЕЖИМЫ
1. Включить
Используется
для того, чтобы другие блоки
в программе управляли продолжительностью
РЕЖИМЫ
1. Включить
Используется
для того, чтобы другие блоки
в программе управляли продолжительностью
РЕЖИМЫ
2.Выключить
Используется для остановки робота, который был запущен в режиме «Включить»
Если
РЕЖИМЫ
2.Выключить
Используется для остановки робота, который был запущен в режиме «Включить»
Если
РЕЖИМЫ
3. Включить на количество секунд
Режим включает оба мотора на количество
РЕЖИМЫ
3. Включить на количество секунд
Режим включает оба мотора на количество
РЕЖИМЫ
4. Включить на количество градусов
Режим используется, чтобы заставить робота пройти
РЕЖИМЫ
4. Включить на количество градусов
Режим используется, чтобы заставить робота пройти

Программа заставит робота двигаться прямо вперед с мощностью 75, пока моторы
Программа заставит робота двигаться прямо вперед с мощностью 75, пока моторы
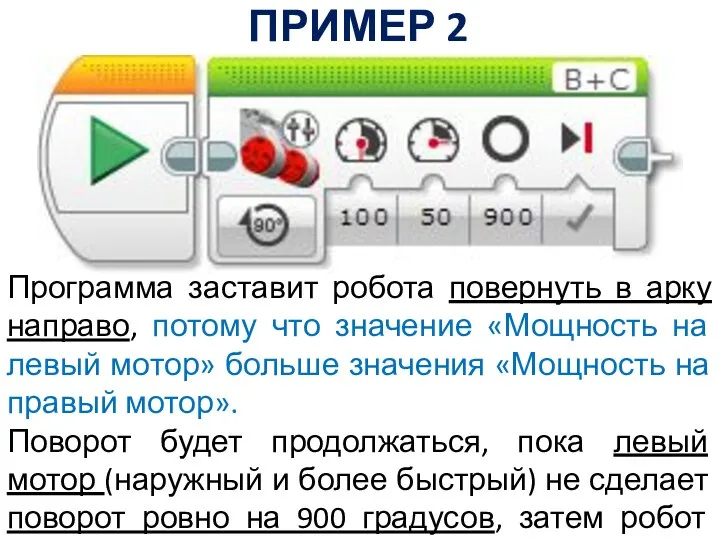
Программа заставит робота повернуть в арку направо, потому что значение «Мощность
Программа заставит робота повернуть в арку направо, потому что значение «Мощность
 Социальная сеть Facebook
Социальная сеть Facebook Гиперпластические процессы эндометрия
Гиперпластические процессы эндометрия Flash tool
Flash tool Амстердамский договор 1997 г. Ниццский договор 2001 г
Амстердамский договор 1997 г. Ниццский договор 2001 г Простые вещества-металлы. 9 класс.Презентация.
Простые вещества-металлы. 9 класс.Презентация. Модификационная изменчивость
Модификационная изменчивость Костюмы народов Саратовского Поволжья
Костюмы народов Саратовского Поволжья Викторина Зимние виды спорта
Викторина Зимние виды спорта Компания Лента
Компания Лента технология модульного обучения. презентация
технология модульного обучения. презентация Газеты блокадного Ленинграда
Газеты блокадного Ленинграда Роль отца в воспитании ребенка
Роль отца в воспитании ребенка Добрые слова
Добрые слова Практика по получению профессиональных умений и опыта профессиональной деятельности
Практика по получению профессиональных умений и опыта профессиональной деятельности Презентация (консультация для родителей) Развитие фонематического слуха у детей с ОНР как часть работы по профилактике дисграфии
Презентация (консультация для родителей) Развитие фонематического слуха у детей с ОНР как часть работы по профилактике дисграфии Мотив одиночества в лирике Лермонтова
Мотив одиночества в лирике Лермонтова Дед Фандей
Дед Фандей Органы и службы системы стандартизации Российской Федерации
Органы и службы системы стандартизации Российской Федерации Синустық брадикардия
Синустық брадикардия Дидактические игры Перелетные птицы
Дидактические игры Перелетные птицы Ковылин Д.И
Ковылин Д.И Классный час. Я - гражданин России
Классный час. Я - гражданин России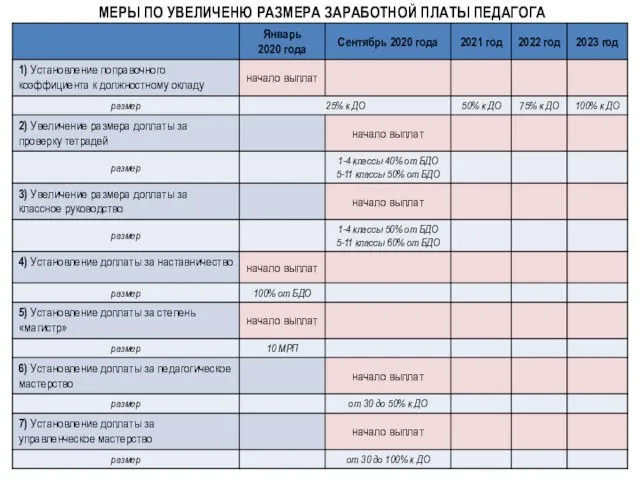 Меры по увеличению размера заработной платы педагога
Меры по увеличению размера заработной платы педагога Режим дня
Режим дня Ветер
Ветер Теоретические основы построения системы технической эксплуатации линейных сооружений связи
Теоретические основы построения системы технической эксплуатации линейных сооружений связи Почему бывает радуга
Почему бывает радуга Международная торговля и услуги
Международная торговля и услуги