- Робототехника. Следование по линии с подсчетом перекрестков

Содержание
- 2. Редко встречаются дороги, которые не пересекаются с другими дорогами. Перекресток – это одно из самых сложных
- 3. Для робота, двигающегося по линии на двух датчиках света, перекресток – это когда оба датчика находятся
- 4. Если движение по линии осуществляется на основе релейного регулятора, то в нём есть одна ветка, соответствующая
- 5. Что делать роботу, когда он обнаружил перекресток? Он может просто его посчитать в переменную и двигаться
- 6. Для того, чтобы робот, оказавшись на перекрестке, выполнил действия, не связанные с движением по линии, движение
- 7. В этой программе выполняется проезд до перекрёстка, и затем, разворот. И так бесконечно:
- 9. Скачать презентацию

Редко встречаются дороги, которые не пересекаются с другими дорогами. Перекресток –
Редко встречаются дороги, которые не пересекаются с другими дорогами. Перекресток –
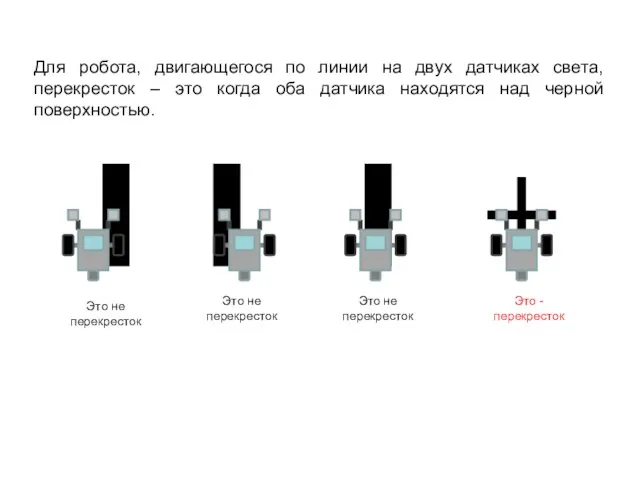
Для робота, двигающегося по линии на двух датчиках света, перекресток –
Для робота, двигающегося по линии на двух датчиках света, перекресток –

Если движение по линии осуществляется на основе релейного регулятора, то в
Если движение по линии осуществляется на основе релейного регулятора, то в

Что делать роботу, когда он обнаружил перекресток? Он может просто его
Что делать роботу, когда он обнаружил перекресток? Он может просто его
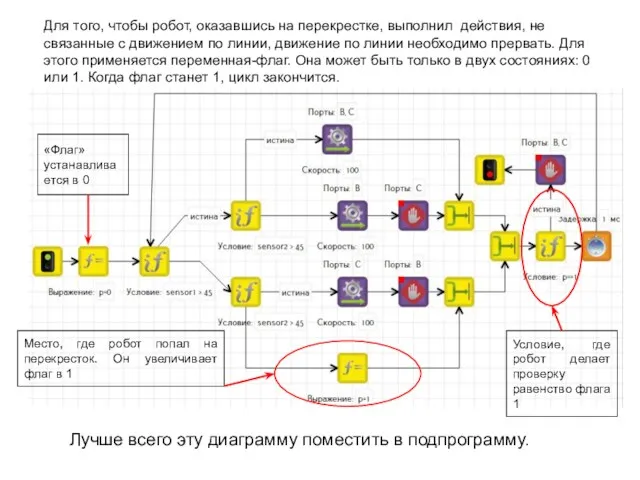
Для того, чтобы робот, оказавшись на перекрестке, выполнил действия, не связанные
Для того, чтобы робот, оказавшись на перекрестке, выполнил действия, не связанные
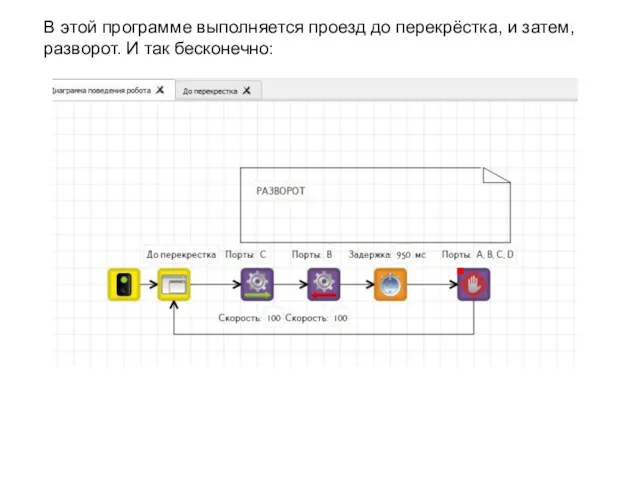
В этой программе выполняется проезд до перекрёстка, и затем, разворот. И
В этой программе выполняется проезд до перекрёстка, и затем, разворот. И
 Крокодилы
Крокодилы Конденсаторы. Обозначения и виды конденсаторов
Конденсаторы. Обозначения и виды конденсаторов Комплексная помощь детям с ОВЗ
Комплексная помощь детям с ОВЗ Анализ стихотворения Н. М. Рубцова Ласточка
Анализ стихотворения Н. М. Рубцова Ласточка Логика
Логика Богдинско-Баскунчакский заповедник
Богдинско-Баскунчакский заповедник презентация Лесные животные
презентация Лесные животные Муса Джалиль - поэт-воин, поэт-герой
Муса Джалиль - поэт-воин, поэт-герой Старший школьный (подростковый, пубертатный) период
Старший школьный (подростковый, пубертатный) период Повреждения трансформаторов
Повреждения трансформаторов Аммиак
Аммиак Виденин Иван Васильевич. Семейные реликвии
Виденин Иван Васильевич. Семейные реликвии Повышение интереса к профессии сварщик
Повышение интереса к профессии сварщик Сірке қышқылын алу технологиясы
Сірке қышқылын алу технологиясы Борис Заходер детям.
Борис Заходер детям. Полевые транзисторы
Полевые транзисторы Введение в курс Общей биологии 10 класс. 3
Введение в курс Общей биологии 10 класс. 3 Удосконалення транспортно-експедиційного обслуговування населення у місті Луцьку
Удосконалення транспортно-експедиційного обслуговування населення у місті Луцьку Шуточные загадки по химии
Шуточные загадки по химии Организация внеурочной деятельности кружка Волшебная кисточка для учеников 1-2 классов за 1 полугодие 2013-2014 уч.г.
Организация внеурочной деятельности кружка Волшебная кисточка для учеников 1-2 классов за 1 полугодие 2013-2014 уч.г. презентация по теме Гидролиз
презентация по теме Гидролиз Конструирование швейных изделий
Конструирование швейных изделий Электрохимические методы анализа: потенциометрия. Потенциометрическое титрование
Электрохимические методы анализа: потенциометрия. Потенциометрическое титрование Учитель мой
Учитель мой Фандрайзинг – привлечение средств на социальные проекты. Молодежное движение Миротворец
Фандрайзинг – привлечение средств на социальные проекты. Молодежное движение Миротворец Портальная гипертензия
Портальная гипертензия Розы из кленовых листьев
Розы из кленовых листьев Проект Белоусова
Проект Белоусова