- Считывание и фильтрация данных с платы TRB3

Содержание
- 2. Введение Настоящая работа посвящена чтению и обработке данных с электронной платы TRB3, предназначенной для считывания будущего
- 3. Знакомство с программным обеспечением для сбора и обработки данных с платы TRB3, с методами обработки экспериментальных
- 4. Разработка алгоритмов фильтрации и их испытание на смоделированных методом Монте-Карло данных. Оптимизация параметров алгоритмов и выбор
- 5. Обзор возможных существующих стандартных решений Для снижения уровня шума существует большое количество фильтров. В работе были
- 6. Фильтр Калмана Фильтр Калмана - это эффективный рекурсивный фильтр. Алгоритм фильтра состоит из двух фаз: прогноз
- 7. Фильтр Винера Фильтр Винера является линейным оптимальным фильтром. На вход фильтра поступают два сигнала: x[k] и
- 8. Выбор пути решения Подходящие алгоритмы для фильтрации редких сигнальных событий при наличии шумовой составляющей в литературе
- 9. Моделирование срабатываний детектора методом Монте-Карло Моделируется массив срабатываний от сигнальных событий (коррелированы по времени) и шумовых
- 10. Алгоритм фильтрации №1 filter1(T, n, hits) T – временное окно для отбора срабатываний, n – минимальное
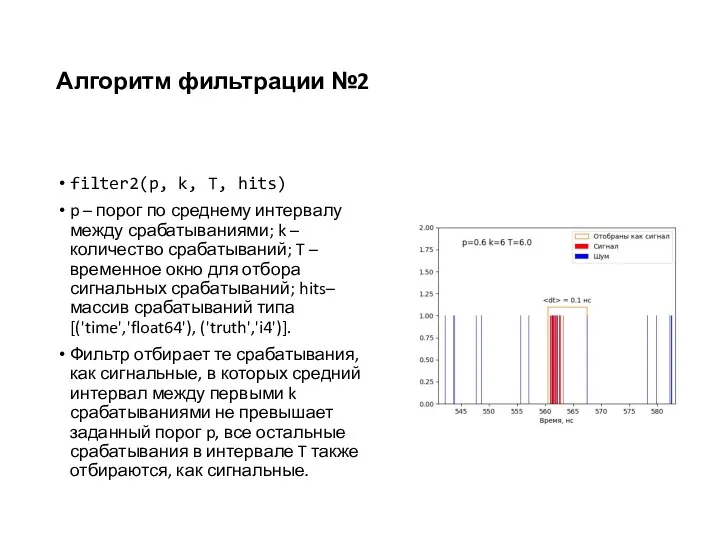
- 11. Алгоритм фильтрации №2 filter2(p, k, T, hits) p – порог по среднему интервалу между срабатываниями; k
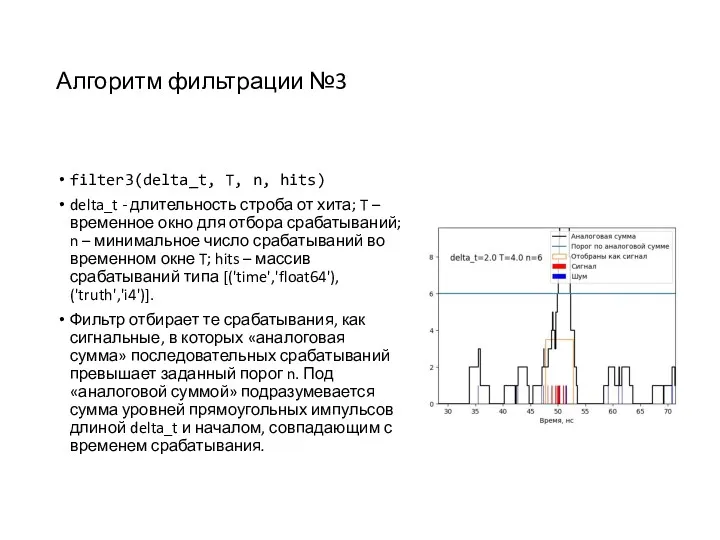
- 12. Алгоритм фильтрации №3 filter3(delta_t, T, n, hits) delta_t - длительность строба от хита; T – временное
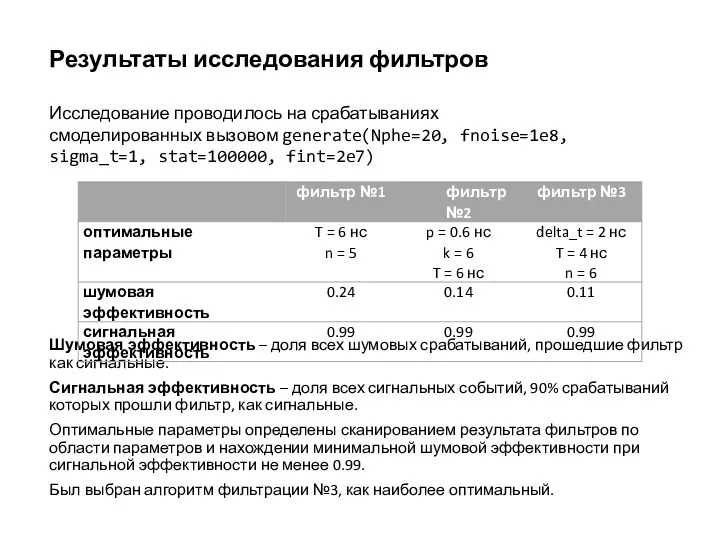
- 13. Результаты исследования фильтров Шумовая эффективность – доля всех шумовых срабатываний, прошедшие фильтр как сигнальные. Сигнальная эффективность
- 14. Экспериментальная установка с H12700 и TRB3 ФЭУ H12700 (64 канала) засвечивается с помощью лазерных импульсов. Интенсивность
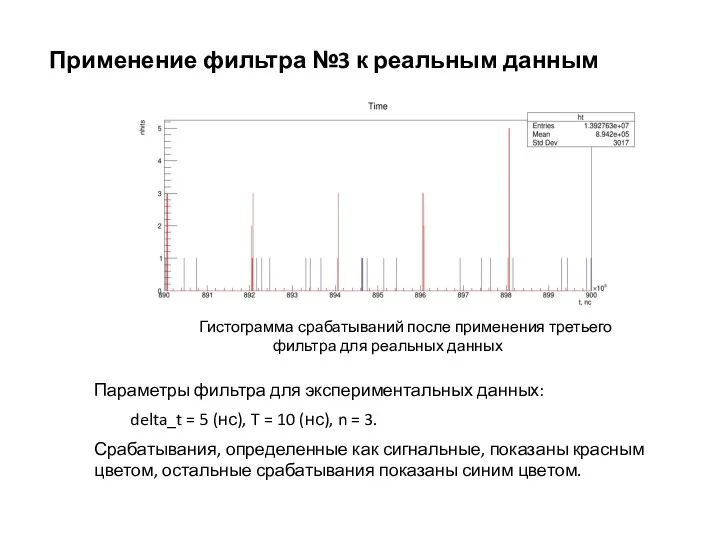
- 15. Применение фильтра №3 к реальным данным Параметры фильтра для экспериментальных данных: delta_t = 5 (нс), T
- 16. Заключение Разработаны 3 алгоритма фильтрации данных по времени и реализованы на Python. Применены к данным моделирования
- 18. Скачать презентацию
Введение
Настоящая работа посвящена чтению и обработке данных с электронной платы TRB3,
Введение
Настоящая работа посвящена чтению и обработке данных с электронной платы TRB3,

Знакомство с программным обеспечением для сбора и обработки данных с платы
Знакомство с программным обеспечением для сбора и обработки данных с платы
Разработка алгоритмов фильтрации и их испытание на смоделированных методом Монте-Карло данных.
Оптимизация
Разработка алгоритмов фильтрации и их испытание на смоделированных методом Монте-Карло данных.
Оптимизация
Обзор возможных существующих стандартных решений
Для снижения уровня шума существует большое количество
Обзор возможных существующих стандартных решений
Для снижения уровня шума существует большое количество
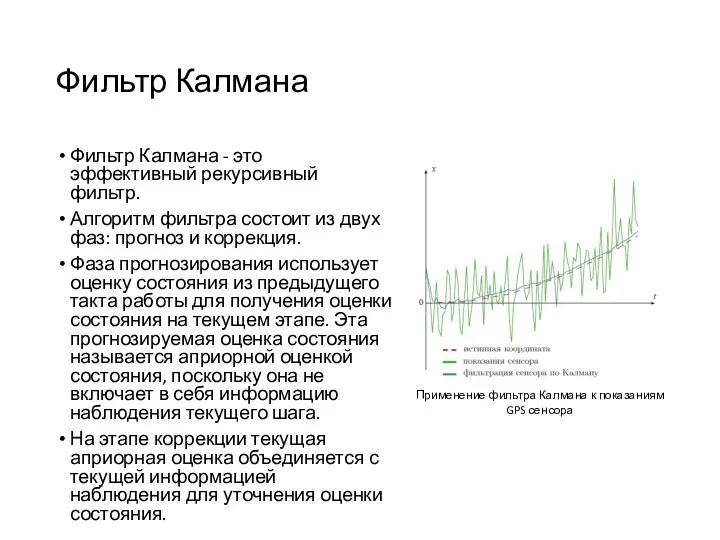
Фильтр Калмана
Фильтр Калмана - это эффективный рекурсивный фильтр.
Алгоритм фильтра состоит
Фильтр Калмана
Фильтр Калмана - это эффективный рекурсивный фильтр.
Алгоритм фильтра состоит
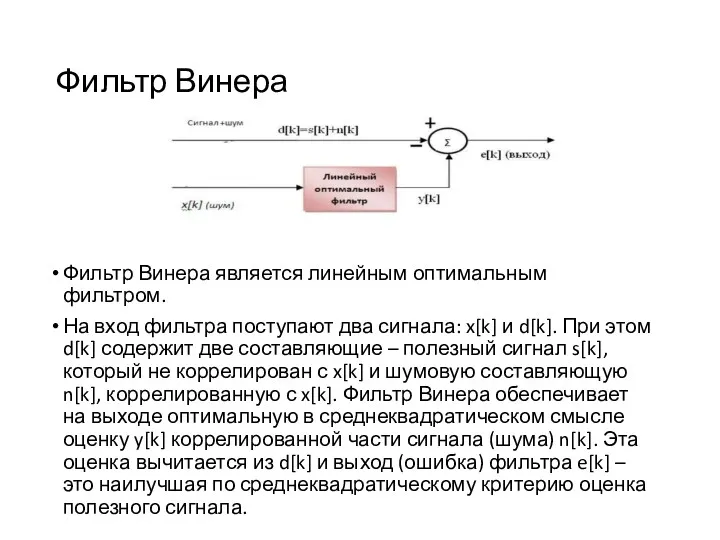
Фильтр Винера
Фильтр Винера является линейным оптимальным фильтром.
На вход фильтра поступают два
Фильтр Винера
Фильтр Винера является линейным оптимальным фильтром.
На вход фильтра поступают два
Выбор пути решения
Подходящие алгоритмы для фильтрации редких сигнальных событий при наличии
Выбор пути решения
Подходящие алгоритмы для фильтрации редких сигнальных событий при наличии
Моделирование срабатываний детектора методом Монте-Карло
Моделируется массив срабатываний от сигнальных событий (коррелированы
Моделирование срабатываний детектора методом Монте-Карло
Моделируется массив срабатываний от сигнальных событий (коррелированы
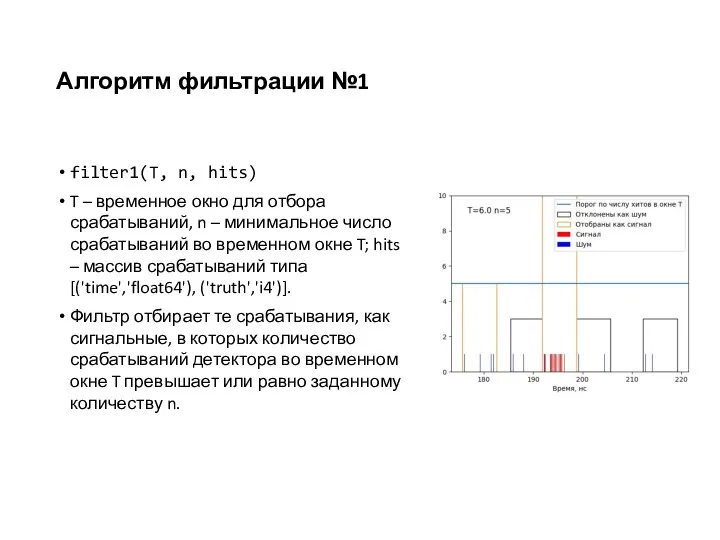
Алгоритм фильтрации №1
filter1(T, n, hits)
T – временное окно для отбора срабатываний,
Алгоритм фильтрации №1
filter1(T, n, hits)
T – временное окно для отбора срабатываний,
Алгоритм фильтрации №2
filter2(p, k, T, hits)
p – порог по среднему интервалу
Алгоритм фильтрации №2
filter2(p, k, T, hits)
p – порог по среднему интервалу
Алгоритм фильтрации №3
filter3(delta_t, T, n, hits)
delta_t - длительность строба от хита;
Алгоритм фильтрации №3
filter3(delta_t, T, n, hits)
delta_t - длительность строба от хита;
Результаты исследования фильтров
Шумовая эффективность – доля всех шумовых срабатываний, прошедшие фильтр
Результаты исследования фильтров
Шумовая эффективность – доля всех шумовых срабатываний, прошедшие фильтр

Экспериментальная установка с H12700 и TRB3
ФЭУ H12700 (64 канала) засвечивается с
Экспериментальная установка с H12700 и TRB3
ФЭУ H12700 (64 канала) засвечивается с
Применение фильтра №3 к реальным данным
Параметры фильтра для экспериментальных данных:
delta_t =
Применение фильтра №3 к реальным данным
Параметры фильтра для экспериментальных данных:
delta_t =
Заключение
Разработаны 3 алгоритма фильтрации данных по времени и реализованы на Python.
Заключение
Разработаны 3 алгоритма фильтрации данных по времени и реализованы на Python.
 Исторический процесс
Исторический процесс Русский язык. Лексика и грамматика
Русский язык. Лексика и грамматика Герой нашего времени. Повесть Тамань
Герой нашего времени. Повесть Тамань Марина Ивановна Цветаева
Марина Ивановна Цветаева викторина От слова к слову
викторина От слова к слову Искусство Средневековья
Искусство Средневековья Грейды по уровням ответственности мануальных тестировщиков
Грейды по уровням ответственности мануальных тестировщиков Мини-проект Золотая нить времени
Мини-проект Золотая нить времени 23 февраля - День защитника Отечества
23 февраля - День защитника Отечества Оценка технических свойств древесины и материалов
Оценка технических свойств древесины и материалов Деление на однозначное число.2
Деление на однозначное число.2 Training course introduction to psr system
Training course introduction to psr system Зима. Мое любимое время года
Зима. Мое любимое время года Человек: строение, система органов
Человек: строение, система органов Лекция 1. Общая характеристика психологии как науки
Лекция 1. Общая характеристика психологии как науки Упрощенная система налогообложения
Упрощенная система налогообложения Гуляй, Масленица!
Гуляй, Масленица! Структура педагогического проекта
Структура педагогического проекта Презентация Деятельностный подход к формированию экологической культуры младших школьников
Презентация Деятельностный подход к формированию экологической культуры младших школьников Регистрация религиозных объединений
Регистрация религиозных объединений отбасым алтын ұям ІІ бөлім
отбасым алтын ұям ІІ бөлім Выбираем профессию
Выбираем профессию 1 сентября Волшебная Страна Знаний
1 сентября Волшебная Страна Знаний духовно - нравственное воспитание
духовно - нравственное воспитание Слайды
Слайды Проект рабочей программы (образовательные области: Познание, Речевое развитие) подготовительная группа
Проект рабочей программы (образовательные области: Познание, Речевое развитие) подготовительная группа Тұқы балықтары. Қазақстанда балықтардың ресурстары
Тұқы балықтары. Қазақстанда балықтардың ресурстары Синдром дефицита внимания с гиперактивностью
Синдром дефицита внимания с гиперактивностью