- Сенсоры. Характеристики датчиков

Содержание
- 2. Характеристики датчиков Цель лекции: сформировать у слушателей более точное представление о том, что собой представляют сенсоры,
- 3. План: 1 Передаточная функция 2 Диапазон измеряемых значений (Максимальный входной сигнал) 3 Диапазон выходных значений 4
- 4. Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на датчик, превратится в выходной электрический
- 5. Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на датчик, превратится в выходной электрический
- 6. Результирующий поток фотонов детектируется и преобразуется в электрический ток. В этой главе будут рассматриваться общие характеристики
- 7. Для каждого датчика можно вывести идеальное или теоретическое соотношение, связывающее сигналы на его входе и выходе.
- 8. Это идеальное (теоретическое) выражение часто называют передаточной функцией. Передаточная функция устанавливает взаимосвязь между выходным электрическим сигналом
- 9. Одномерную линейную функцию можно представить в виде выражения: (2.1) где а — постоянная составляющая (т.е. значение
- 10. В зависимости от свойств датчика это может быть амплитуда, частота или фаза. Логарифмическая передаточная функция имеет
- 11. Однако датчик может иметь передаточную функцию, которую невозможно описать вышеприведенными аппроксимационными выражениями. В таких случаях применяются
- 12. Это называется кусочно-линейной аппроксимацией. Для того, чтобы определить, может ли данная передаточная функция быть представлена в
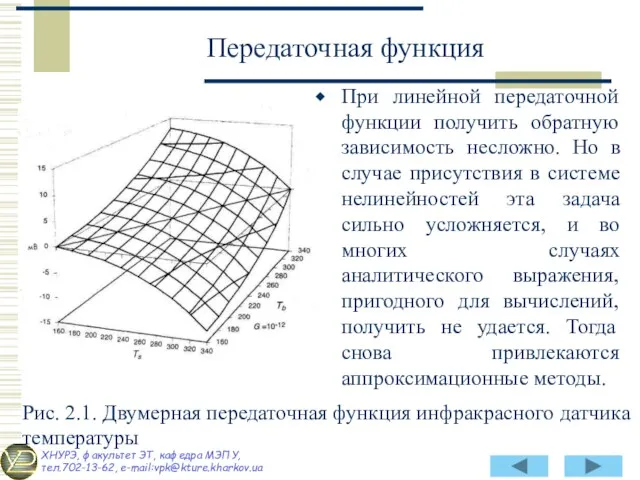
- 13. Его передаточная функция связывает две температуры (Тb — абсолютную температуру объекта измерения и Ts — абсолютную
- 14. Для определения чувствительности такого датчика по отношению к температуре объекта, надо взять частную производную от выражения
- 15. При линейной передаточной функции получить обратную зависимость несложно. Но в случае присутствия в системе нелинейностей эта
- 16. Сигналы отображенные в логарифмическом виде, имеют гораздо меньшие значения, чем исходные, что на практике в ряде
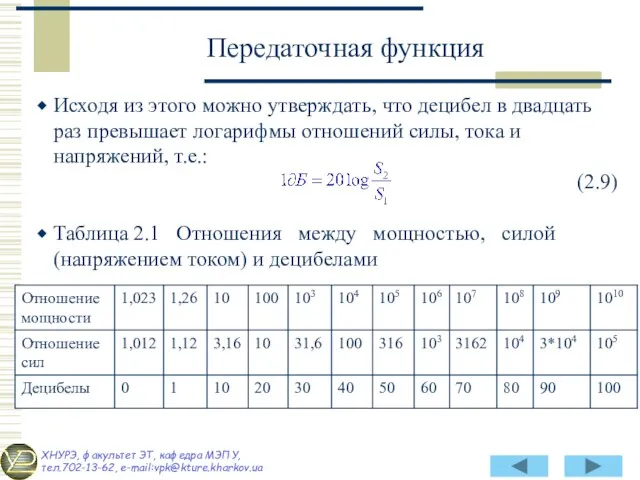
- 17. Исходя из этого можно утверждать, что децибел в двадцать раз превышает логарифмы отношений силы, тока и
- 18. Диапазон выходных значений (FSO) — алгебраическая разность между электрическими выходными сигналами, измеренными при максимальном и минимальном
- 19. Рис. 2.2.а Передаточная функция. Погрешности определены относительно входных значений. Диапазон выходных значений
- 20. Рис. 2.2.б Пределы допустимой погрешности. Погрешности определены относительно входных значений. Диапазон выходных значений
- 21. Точность — очень важная характеристика любого датчика. Правда, когда говорят о точности датчика, чаще всего подразумевают
- 22. В идеальном случае, если его чувствительность b равна 1 мВ/мм, при смещении объекта на 1 мм
- 23. Если при отсутствии случайных ошибок каждый раз при повторении этого эксперимента будет наблюдаться погрешность, равная 0.5
- 24. На рис. 2.2.а показана идеальная или теоретическая передаточная функция. В реальной жизни любой датчик обладает теми
- 25. Даже когда датчики изготавливаются в идентичных условиях, из-за разницы в материалах, в мастерстве работников, ошибок разработчиков,
- 26. Вместо этого по реальной функции при значении х мы попадем в точку Z, и, следовательно, получим
- 27. Из рис. 2.2 Б видно, что при более корректном проведении калибровки (например, при проведении калибровки на
- 28. Все это повышает точность измерений, однако значительно повышает стоимость, из-за чего во многих ситуациях эти методы
- 29. Например, погрешность пьезорезистивного датчика давления с диапазоном входных сигналов 100 кПа и диапазоном выходных сигналов 10
- 30. Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования сигналов) превышают требуемую точность системы,
- 31. Математическое описание передаточной функции необходимо знать до начала проведения калибровки. (2.10) Для определения констант а и
- 32. После чего надо подставить эти величины в выражение (2.10): (2.11) и найти значения констант: (2.12) Для
- 33. (2.13) В некоторых случаях одна из констант может быть заранее определена с достаточной степенью точности, тогда
- 34. Для нелинейных функций калибровку требуется проводить более чем в двух точках. Количество необходимых калибровок диктуется видом
- 35. Применение кусочно-линейной аппроксимации является другим подходом к калибровке нелинейных датчиков. Как упоминалось выше, любую кривую в
- 36. Для проведения калибровки датчиков важно иметь точные физические эталоны, позволяющие моделировать соответствующие внешние воздействия. Например, при
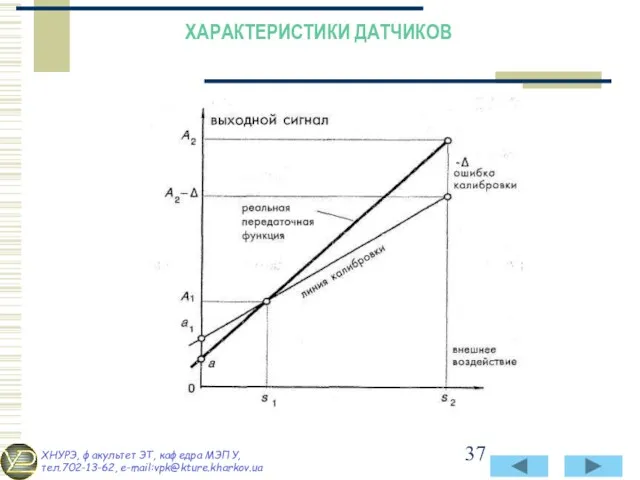
- 37. ХАРАКТЕРИСТИКИ ДАТЧИКОВ Рис. 2.3 Ошибка калибровки
- 38. Она необязательно должна быть равномерной во всем диапазоне измерений и может зависеть от типа ошибки, допущенной
- 39. Первый сигнал был измерен абсолютно точно, однако, при определении второго сигнала была допущена погрешность — А,
- 40. Гистерезис — это разность значений выходного сигнала для одного и того же входного сигнала, полученных при
- 41. Рис. 2.4 Передаточная функция с гистерезисом Гистерезис
- 42. Нелинейность определяется для датчиков, передаточную функцию которых возможно аппроксимировать прямой линией (уравнение (2.1)). Под нелинейностью понимается
- 43. В зависимости от способа проведения аппроксимирующей линии различают несколько типов линеаризации. Один из способов — проведение
- 44. Другой способ линеаризации основан на применении метода наименьших квадратов (линия 2 на рис. 2.5 А). Для
- 45. На практике, в некоторых случаях, может потребоваться большая точность линеаризации в узком диапазоне входных сигналов. Например,
- 46. В результате такой процедуры наименьшее значение нелинейности достигается в зоне калибровочной точки, а ближе к концам
- 47. Рис. 2.5 Линейная аппроксимация нелинейной передаточной функции (А) и независимая линеаризация (Б) Нелинейность
- 48. Метод независимой линеаризации часто называется «методом наилучшей прямой» (рис. 2.5 Б). Он заключается в нахождении линии,
- 49. Каждый датчик имеет свой пределы рабочих характеристик. Даже если он считается линейным, при определенном уровне внешнего
- 50. Рис. 2.6 Передаточная функция с насыщением Насыщение
- 51. Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные результаты. Воспроизводимость результатов определяется по
- 52. Рис. 2.7 А - ошибка воспроизводимости: одному и тому же выходному сигналу соответствуют разные внешние воздействия.
- 53. Мертвая зона — это нечувствительность датчика в определенном диапазоне входных сигналов (рис. 2.7Б). В пределах этой
- 54. Разрешающая способность характеризует минимальное изменение измеряемой величины, которое может почувствовать датчик. При непрерывном изменении внешнего воздействия
- 55. Особенно отчетливо это видно в потенциометрических датчиках, инфракрасных датчиках контроля территории с сетчатой маской и других
- 56. Например, для инфракрасного датчика контроля территории можно дать следующее определение разрешающей способности: «разрешающая способность — возможность
- 57. Следует отметить, что размер ступени может меняться внутри диапазона измеряемых значений, поэтому, как правило, разрешающая способность
- 59. Скачать презентацию
Характеристики датчиков
Цель лекции: сформировать у слушателей более точное представление о том,
Характеристики датчиков
Цель лекции: сформировать у слушателей более точное представление о том,
План:
1 Передаточная функция
2 Диапазон измеряемых значений (Максимальный входной сигнал)
3 Диапазон выходных
План:
1 Передаточная функция
2 Диапазон измеряемых значений (Максимальный входной сигнал)
3 Диапазон выходных
Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на
Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на
Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на
Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на
Результирующий поток фотонов детектируется и преобразуется в электрический ток. В этой
Результирующий поток фотонов детектируется и преобразуется в электрический ток. В этой
Для каждого датчика можно вывести идеальное или теоретическое соотношение, связывающее сигналы
Для каждого датчика можно вывести идеальное или теоретическое соотношение, связывающее сигналы
Это идеальное (теоретическое) выражение часто называют передаточной функцией. Передаточная функция устанавливает
Это идеальное (теоретическое) выражение часто называют передаточной функцией. Передаточная функция устанавливает
Одномерную линейную функцию можно представить в виде выражения:
(2.1)
где а —
Одномерную линейную функцию можно представить в виде выражения:
(2.1)
где а —
В зависимости от свойств датчика это может быть амплитуда, частота или
В зависимости от свойств датчика это может быть амплитуда, частота или
Однако датчик может иметь передаточную функцию, которую невозможно описать вышеприведенными аппроксимационными
Однако датчик может иметь передаточную функцию, которую невозможно описать вышеприведенными аппроксимационными
Это называется кусочно-линейной аппроксимацией. Для того, чтобы определить, может ли данная
Это называется кусочно-линейной аппроксимацией. Для того, чтобы определить, может ли данная
Его передаточная функция связывает две температуры (Тb — абсолютную температуру объекта
Его передаточная функция связывает две температуры (Тb — абсолютную температуру объекта
Для определения чувствительности такого датчика по отношению к температуре объекта, надо
Для определения чувствительности такого датчика по отношению к температуре объекта, надо
При линейной передаточной функции получить обратную зависимость несложно. Но в случае
При линейной передаточной функции получить обратную зависимость несложно. Но в случае
Сигналы отображенные в логарифмическом виде, имеют гораздо меньшие значения, чем исходные,
Сигналы отображенные в логарифмическом виде, имеют гораздо меньшие значения, чем исходные,
Исходя из этого можно утверждать, что децибел в двадцать раз превышает
Исходя из этого можно утверждать, что децибел в двадцать раз превышает
Диапазон выходных значений (FSO) — алгебраическая разность между электрическими выходными сигналами,
Диапазон выходных значений (FSO) — алгебраическая разность между электрическими выходными сигналами,
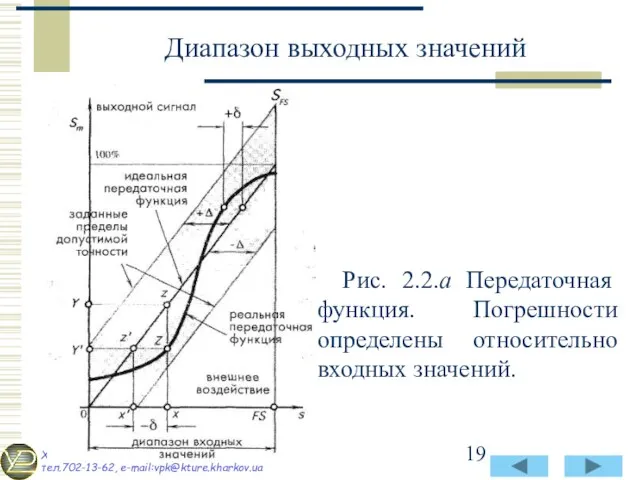
Рис. 2.2.а Передаточная функция. Погрешности определены относительно входных значений.
Диапазон выходных значений
Рис. 2.2.а Передаточная функция. Погрешности определены относительно входных значений.
Диапазон выходных значений
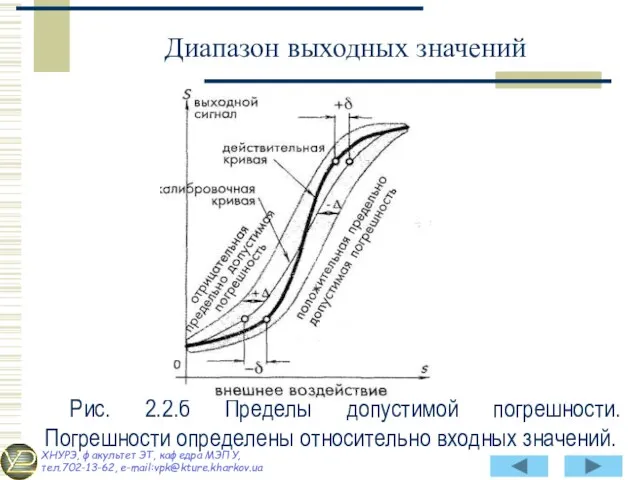
Рис. 2.2.б Пределы допустимой погрешности. Погрешности определены относительно входных значений.
Диапазон выходных
Рис. 2.2.б Пределы допустимой погрешности. Погрешности определены относительно входных значений.
Диапазон выходных
Точность — очень важная характеристика любого датчика. Правда, когда говорят о
Точность — очень важная характеристика любого датчика. Правда, когда говорят о
В идеальном случае, если его чувствительность b равна 1 мВ/мм,
В идеальном случае, если его чувствительность b равна 1 мВ/мм,
Если при отсутствии случайных ошибок каждый раз при повторении этого эксперимента
Если при отсутствии случайных ошибок каждый раз при повторении этого эксперимента
На рис. 2.2.а показана идеальная или теоретическая передаточная функция. В реальной
На рис. 2.2.а показана идеальная или теоретическая передаточная функция. В реальной
Даже когда датчики изготавливаются в идентичных условиях, из-за разницы в материалах,
Даже когда датчики изготавливаются в идентичных условиях, из-за разницы в материалах,
Вместо этого по реальной функции при значении х мы попадем в
Вместо этого по реальной функции при значении х мы попадем в
Из рис. 2.2 Б видно, что при более корректном проведении калибровки
Из рис. 2.2 Б видно, что при более корректном проведении калибровки
Все это повышает точность измерений, однако значительно повышает стоимость, из-за чего
Все это повышает точность измерений, однако значительно повышает стоимость, из-за чего
Например, погрешность пьезорезистивного датчика давления с диапазоном входных сигналов 100 кПа
Например, погрешность пьезорезистивного датчика давления с диапазоном входных сигналов 100 кПа
Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования
Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования
Математическое описание передаточной функции необходимо знать до начала проведения калибровки.
(2.10)
Для
Математическое описание передаточной функции необходимо знать до начала проведения калибровки.
(2.10)
Для
После чего надо подставить эти величины в выражение (2.10):
(2.11)
и найти
После чего надо подставить эти величины в выражение (2.10):
(2.11)
и найти
(2.13)
В некоторых случаях одна из констант может быть заранее определена с
(2.13)
В некоторых случаях одна из констант может быть заранее определена с
Для нелинейных функций калибровку требуется проводить более чем в двух точках.
Для нелинейных функций калибровку требуется проводить более чем в двух точках.
Применение кусочно-линейной аппроксимации является другим подходом к калибровке нелинейных датчиков. Как
Применение кусочно-линейной аппроксимации является другим подходом к калибровке нелинейных датчиков. Как
Для проведения калибровки датчиков важно иметь точные физические эталоны, позволяющие моделировать
Для проведения калибровки датчиков важно иметь точные физические эталоны, позволяющие моделировать
ХАРАКТЕРИСТИКИ ДАТЧИКОВ
Рис. 2.3 Ошибка калибровки
ХАРАКТЕРИСТИКИ ДАТЧИКОВ
Рис. 2.3 Ошибка калибровки
Она необязательно должна быть равномерной во всем диапазоне измерений и может
Она необязательно должна быть равномерной во всем диапазоне измерений и может
Первый сигнал был измерен абсолютно точно, однако, при определении второго сигнала
Первый сигнал был измерен абсолютно точно, однако, при определении второго сигнала
Гистерезис — это разность значений выходного сигнала для одного и того
Гистерезис — это разность значений выходного сигнала для одного и того
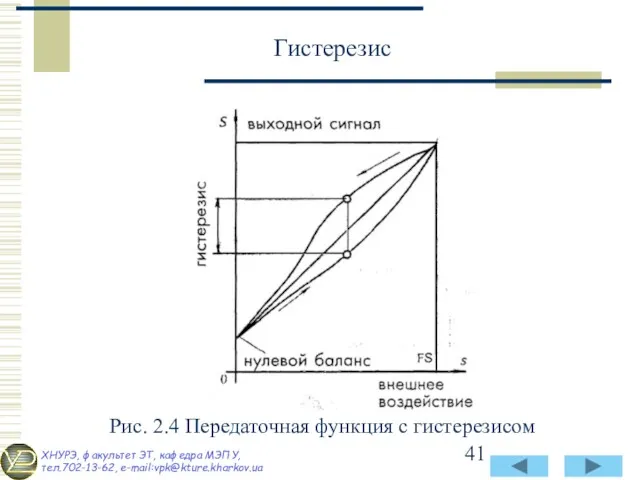
Рис. 2.4 Передаточная функция с гистерезисом
Гистерезис
Рис. 2.4 Передаточная функция с гистерезисом
Гистерезис
Нелинейность определяется для датчиков, передаточную функцию которых возможно аппроксимировать прямой линией
Нелинейность определяется для датчиков, передаточную функцию которых возможно аппроксимировать прямой линией
В зависимости от способа проведения аппроксимирующей линии различают несколько типов линеаризации.
В зависимости от способа проведения аппроксимирующей линии различают несколько типов линеаризации.
Другой способ линеаризации основан на применении метода наименьших квадратов (линия 2
Другой способ линеаризации основан на применении метода наименьших квадратов (линия 2
На практике, в некоторых случаях, может потребоваться большая точность линеаризации в
На практике, в некоторых случаях, может потребоваться большая точность линеаризации в
В результате такой процедуры наименьшее значение нелинейности достигается в зоне калибровочной
В результате такой процедуры наименьшее значение нелинейности достигается в зоне калибровочной
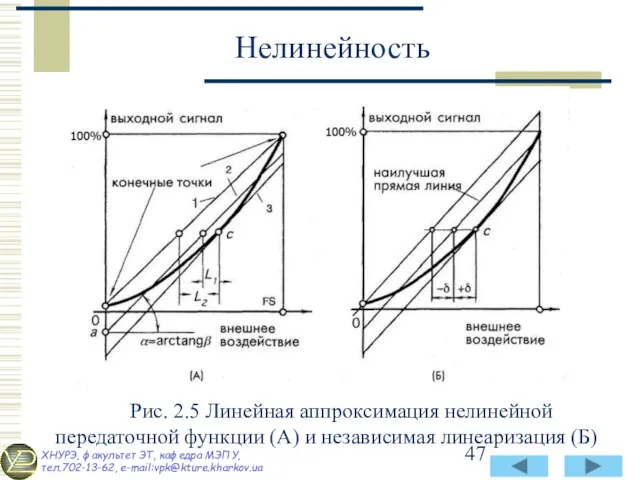
Рис. 2.5 Линейная аппроксимация нелинейной передаточной функции (А) и независимая линеаризация
Рис. 2.5 Линейная аппроксимация нелинейной передаточной функции (А) и независимая линеаризация
Метод независимой линеаризации часто называется «методом наилучшей прямой» (рис. 2.5 Б).
Метод независимой линеаризации часто называется «методом наилучшей прямой» (рис. 2.5 Б).
Каждый датчик имеет свой пределы рабочих характеристик. Даже если он считается
Каждый датчик имеет свой пределы рабочих характеристик. Даже если он считается
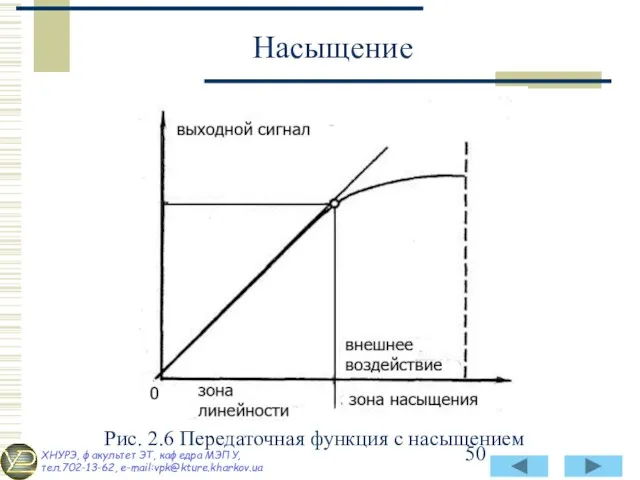
Рис. 2.6 Передаточная функция с насыщением
Насыщение
Рис. 2.6 Передаточная функция с насыщением
Насыщение
Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные
Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные
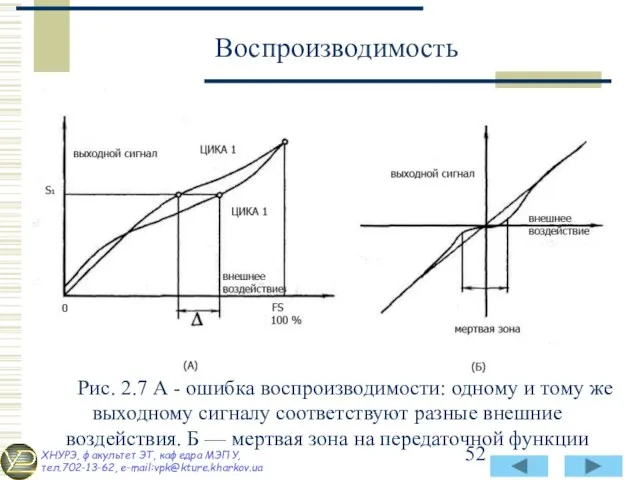
Рис. 2.7 А - ошибка воспроизводимости: одному и тому же выходному
Рис. 2.7 А - ошибка воспроизводимости: одному и тому же выходному
Мертвая зона — это нечувствительность датчика в определенном диапазоне входных сигналов
Мертвая зона — это нечувствительность датчика в определенном диапазоне входных сигналов
Разрешающая способность характеризует минимальное изменение измеряемой величины, которое может почувствовать датчик.
Разрешающая способность характеризует минимальное изменение измеряемой величины, которое может почувствовать датчик.
Особенно отчетливо это видно в потенциометрических датчиках, инфракрасных датчиках контроля территории
Особенно отчетливо это видно в потенциометрических датчиках, инфракрасных датчиках контроля территории
Например, для инфракрасного датчика контроля территории можно дать следующее определение разрешающей
Например, для инфракрасного датчика контроля территории можно дать следующее определение разрешающей
Следует отметить, что размер ступени может меняться внутри диапазона измеряемых значений,
Следует отметить, что размер ступени может меняться внутри диапазона измеряемых значений,
 Занятие кружка внеурочной деятельности Я - гражданин России . Тема занятия Школа вчера, сегодня, завтра
Занятие кружка внеурочной деятельности Я - гражданин России . Тема занятия Школа вчера, сегодня, завтра Терминальные состояния. Основы современной реанимации
Терминальные состояния. Основы современной реанимации Австралия, очертания берегов, климат, реки, озёра.
Австралия, очертания берегов, климат, реки, озёра. Утилизация ПЭТ - бутылок
Утилизация ПЭТ - бутылок Distance learning
Distance learning Филиал Удмуртский ПАО Т Плюс
Филиал Удмуртский ПАО Т Плюс treniruem_pamjat_nachalnye_klassy
treniruem_pamjat_nachalnye_klassy Финальные штришки оформления
Финальные штришки оформления Распределительный закон умножения
Распределительный закон умножения Рак кожи и меланома
Рак кожи и меланома Трудовые ресурсы. Занятость. Тема 3
Трудовые ресурсы. Занятость. Тема 3 Мастер обработки цифровой информации
Мастер обработки цифровой информации Какие вклады являются застрахованными
Какие вклады являются застрахованными “Астана Опера”. Мемлекеттік опера және балет театры
“Астана Опера”. Мемлекеттік опера және балет театры Характеристика нейтронов
Характеристика нейтронов Шәүкәт Галиев
Шәүкәт Галиев Селекция микроорганизмов
Селекция микроорганизмов Путешествия развивают ум. Книжно-виртуальное путешествие
Путешествия развивают ум. Книжно-виртуальное путешествие Общая правила по технике безопасности в лабораториях экспресс диагностики острых отравлений живых людей
Общая правила по технике безопасности в лабораториях экспресс диагностики острых отравлений живых людей Ет консервілері
Ет консервілері PML30_SummerPractice2022_Presentation_Pattern
PML30_SummerPractice2022_Presentation_Pattern Правила поведения на дороге.
Правила поведения на дороге. презентация ГИМНАСТИКА МОЗГА
презентация ГИМНАСТИКА МОЗГА Учение об инфекции
Учение об инфекции Закрытие олимпиады Сочи 2014
Закрытие олимпиады Сочи 2014 Человек и его здоровье. Витамины в пище
Человек и его здоровье. Витамины в пище Родительское собрание Как привить любовь к чтению
Родительское собрание Как привить любовь к чтению Тема Отмена крепостного права.
Тема Отмена крепостного права.