- Симплекс-метод решения задач линейного программирования

Содержание
- 2. АЛГОРИТМ СИМПЛЕКС-МЕТОДА Содержание Определение К-матрицы в КЗЛП Переход от одной К-матрицы КЗЛП к другой К-матрице Симплекс-разность
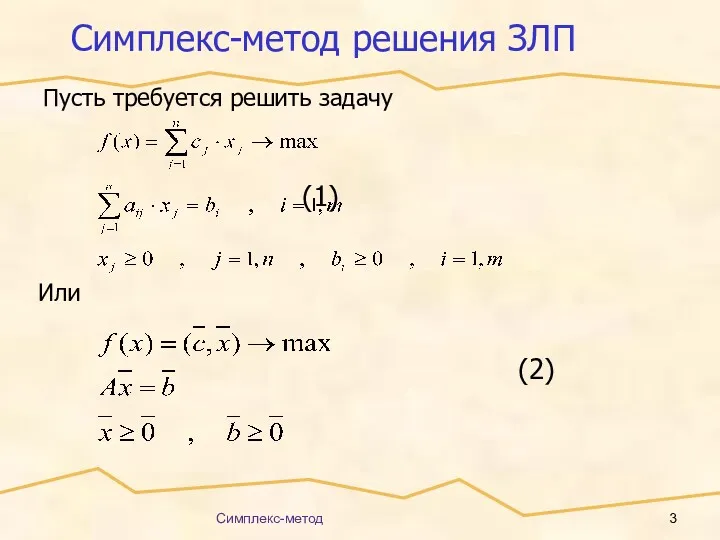
- 3. Симплекс-метод Пусть требуется решить задачу (1) Или (2) Симплекс-метод решения ЗЛП
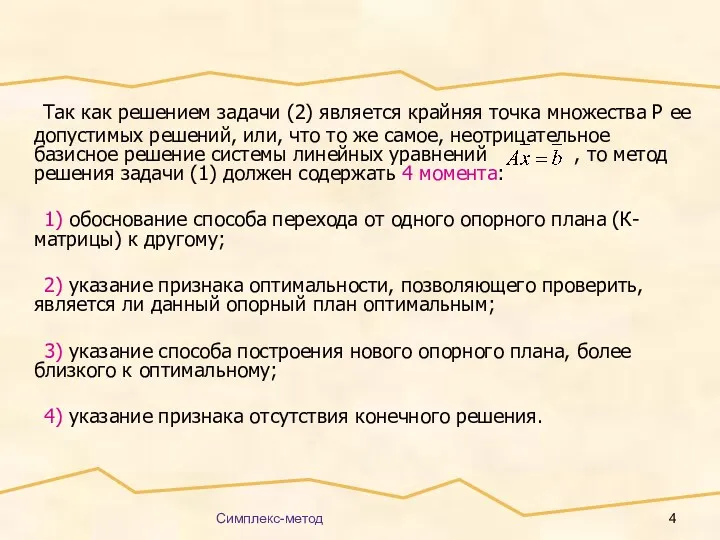
- 4. Симплекс-метод Так как решением задачи (2) является крайняя точка множества Р ее допустимых решений, или, что
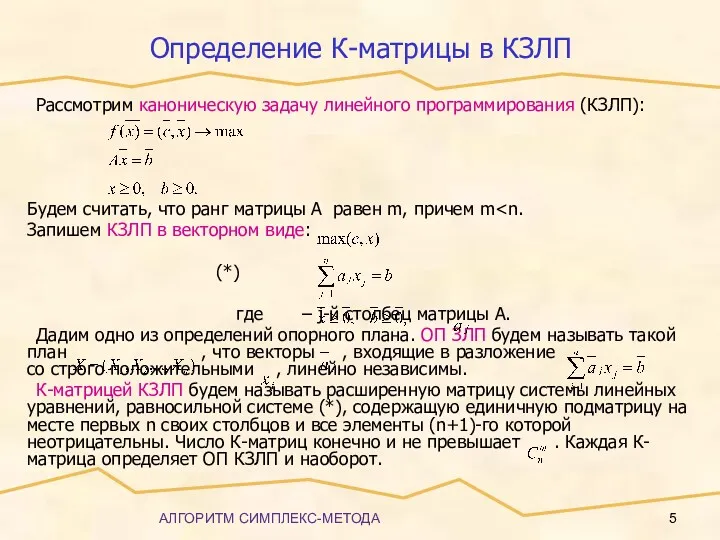
- 5. АЛГОРИТМ СИМПЛЕКС-МЕТОДА Определение К-матрицы в КЗЛП Рассмотрим каноническую задачу линейного программирования (КЗЛП): Будем считать, что ранг
- 6. Переход от одной К-матрицы ЗЛП к другой Переход от одной К-матрицы ЗЛП к другой К-матрице. Пусть
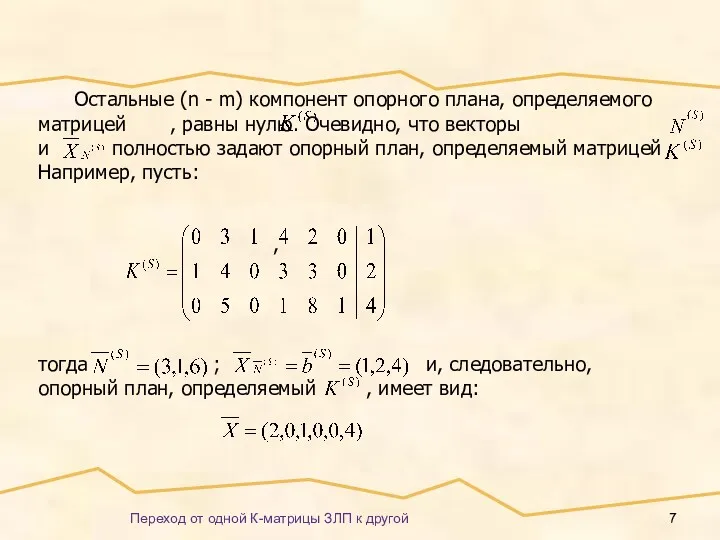
- 7. Переход от одной К-матрицы ЗЛП к другой Остальные (n - m) компонент опорного плана, определяемого матрицей
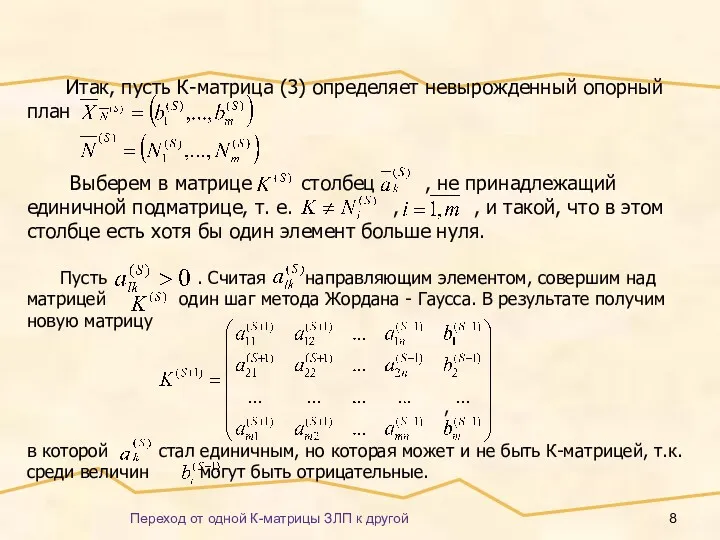
- 8. Переход от одной К-матрицы ЗЛП к другой Итак, пусть К-матрица (3) определяет невырожденный опорный план Выберем
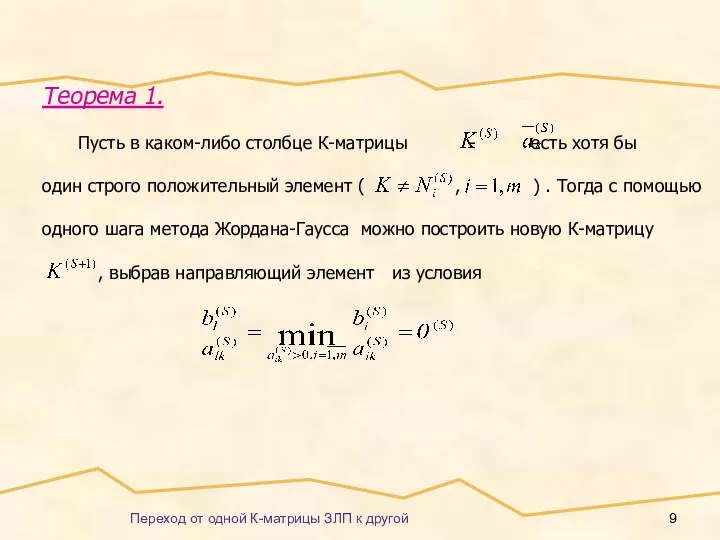
- 9. Переход от одной К-матрицы ЗЛП к другой Теорема 1. Пусть в каком-либо столбце К-матрицы - есть
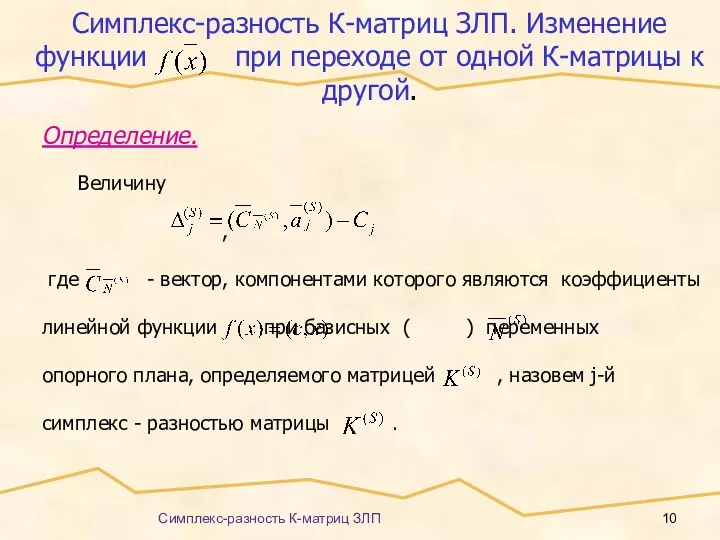
- 10. Симплекс-разность К-матриц ЗЛП Симплекс-разность К-матриц ЗЛП. Изменение функции при переходе от одной К-матрицы к другой. Определение.
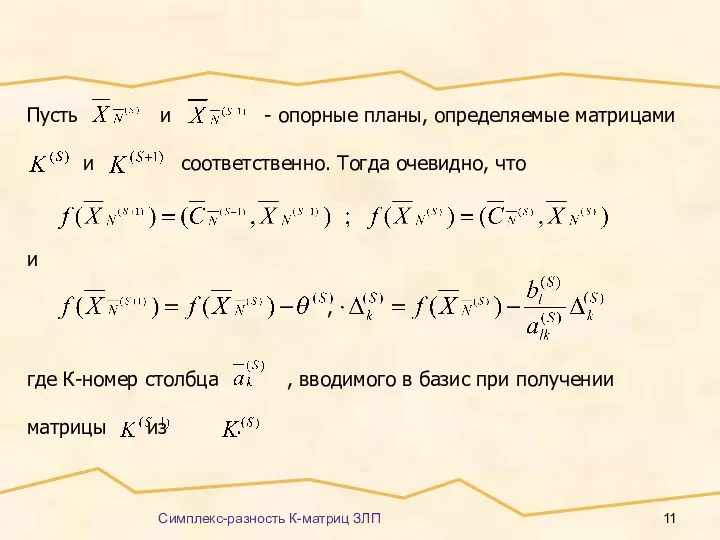
- 11. Симплекс-разность К-матриц ЗЛП Пусть и - опорные планы, определяемые матрицами и соответственно. Тогда очевидно, что и
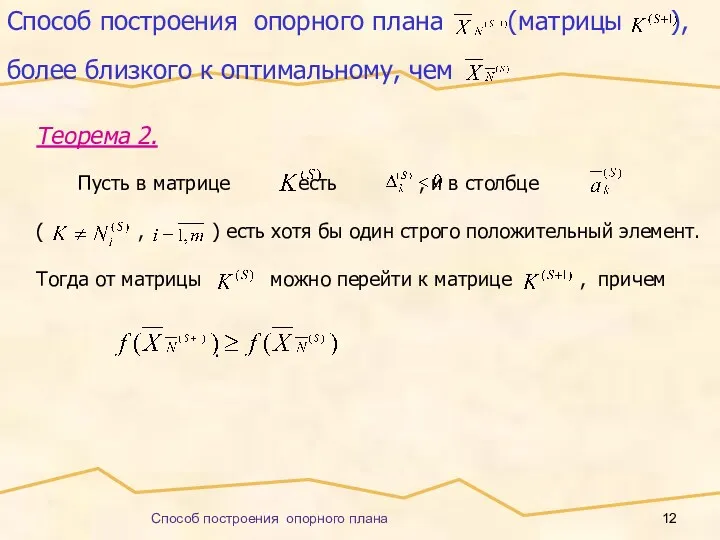
- 12. Способ построения опорного плана Способ построения опорного плана (матрицы ), более близкого к оптимальному, чем Теорема
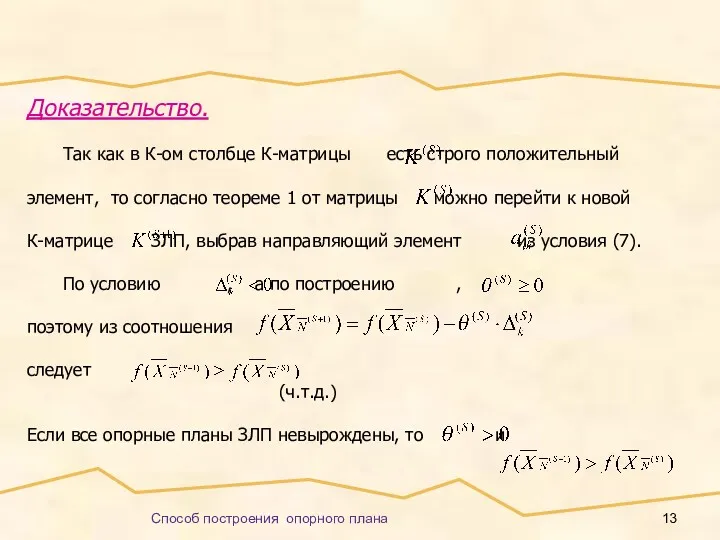
- 13. Способ построения опорного плана Доказательство. Так как в К-ом столбце К-матрицы есть строго положительный элемент, то
- 14. Критерий оптимальности опорного плана Критерий оптимальности опорного плана Теорема 3 Пусть все симплекс - разности матрицы
- 15. Критерий оптимальности опорного плана Согласно (9) имеем: или Что и доказывает теорему.
- 16. Критерий отсутствия конечного решения Критерий отсутствия конечного решения. Теорема 4 Пусть в матрице есть , и
- 17. Критерий отсутствия конечного решения Рассмотрим вектор у которого где -любое положительное число. Остальные n-m+1 компонент вектора
- 18. Критерий отсутствия конечного решения Имеем: Или окончательно (12) Т.к. , то из (12) следует, что для
- 19. ПРИМЕР №1 Пример 1 Симплекс-методом решить ЗЛП: (1) (2)
- 20. ПРИМЕР №1 Приводим систему линейных неравенств (2) к каноническому виду, вводя в каждое неравенство дополнительную переменную
- 21. ПРИМЕР №1 Целевая функция (1) будет иметь вид Расширенная матрица системы линейных уравнений (3) является исходной
- 22. ПРИМЕР №1 Введём следующие обозначения: S-номер итерации i-номера строк таблицы -номера столбцов, образующих единичную подматрицу -коэффициенты
- 23. Результаты последовательных итераций симплекс-алгоритма оформим в виде симплекс-таблицы.
- 24. ПРИМЕР №1 На второй итерации S=2, все следовательно, опорный план определяемый К-матрицей , оптимальный, Оптимальное значение
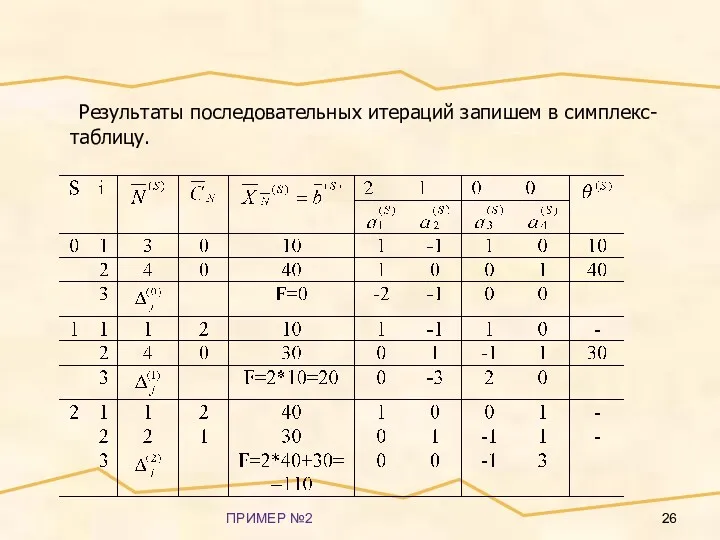
- 25. ПРИМЕР №2 Пример 2 Симплекс-методом решить ЗЛП: (4) (5) Приводим ЗЛП (4-5) к каноническому виду (6)
- 26. ПРИМЕР №2 Результаты последовательных итераций запишем в симплекс-таблицу.
- 28. Скачать презентацию
АЛГОРИТМ СИМПЛЕКС-МЕТОДА
Содержание
Определение К-матрицы в КЗЛП
Переход от одной К-матрицы КЗЛП к другой
АЛГОРИТМ СИМПЛЕКС-МЕТОДА
Содержание
Определение К-матрицы в КЗЛП
Переход от одной К-матрицы КЗЛП к другой
Симплекс-метод
Пусть требуется решить задачу
(1)
Или
(2)
Симплекс-метод решения ЗЛП
Симплекс-метод
Пусть требуется решить задачу
(1)
Или
(2)
Симплекс-метод решения ЗЛП
Симплекс-метод
Так как решением задачи (2) является крайняя точка множества Р
Симплекс-метод
Так как решением задачи (2) является крайняя точка множества Р
АЛГОРИТМ СИМПЛЕКС-МЕТОДА
Определение К-матрицы в КЗЛП
Рассмотрим каноническую задачу линейного программирования (КЗЛП):
Будем считать,
АЛГОРИТМ СИМПЛЕКС-МЕТОДА
Определение К-матрицы в КЗЛП
Рассмотрим каноническую задачу линейного программирования (КЗЛП):
Будем считать,
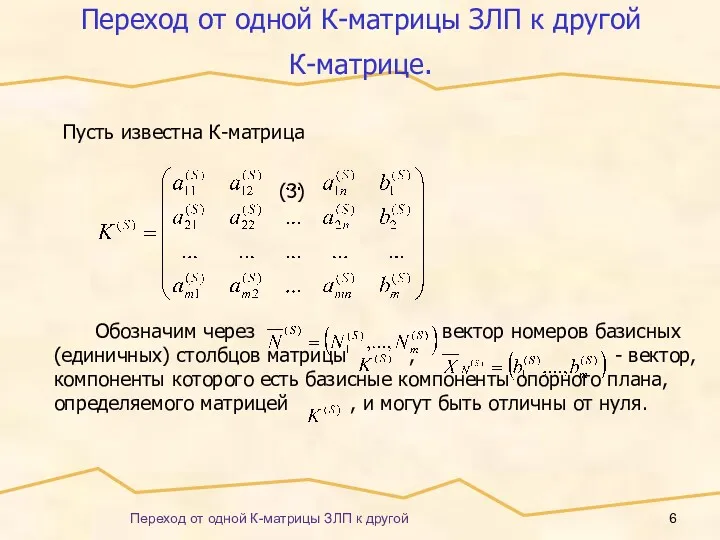
Переход от одной К-матрицы ЗЛП к другой
Переход от одной К-матрицы
Переход от одной К-матрицы ЗЛП к другой
Переход от одной К-матрицы
Переход от одной К-матрицы ЗЛП к другой
Остальные (n - m)
Переход от одной К-матрицы ЗЛП к другой
Остальные (n - m)
Переход от одной К-матрицы ЗЛП к другой
Итак, пусть К-матрица
Переход от одной К-матрицы ЗЛП к другой
Итак, пусть К-матрица
Переход от одной К-матрицы ЗЛП к другой
Теорема 1.
Пусть в каком-либо
Переход от одной К-матрицы ЗЛП к другой
Теорема 1.
Пусть в каком-либо
Симплекс-разность К-матриц ЗЛП
Симплекс-разность К-матриц ЗЛП. Изменение функции при переходе от одной
Симплекс-разность К-матриц ЗЛП
Симплекс-разность К-матриц ЗЛП. Изменение функции при переходе от одной
Симплекс-разность К-матриц ЗЛП
Пусть и - опорные планы, определяемые матрицами
и
Симплекс-разность К-матриц ЗЛП
Пусть и - опорные планы, определяемые матрицами
и
Способ построения опорного плана
Способ построения опорного плана (матрицы ), более
Способ построения опорного плана
Способ построения опорного плана (матрицы ), более
Способ построения опорного плана
Доказательство.
Так как в К-ом столбце К-матрицы есть строго
Способ построения опорного плана
Доказательство.
Так как в К-ом столбце К-матрицы есть строго
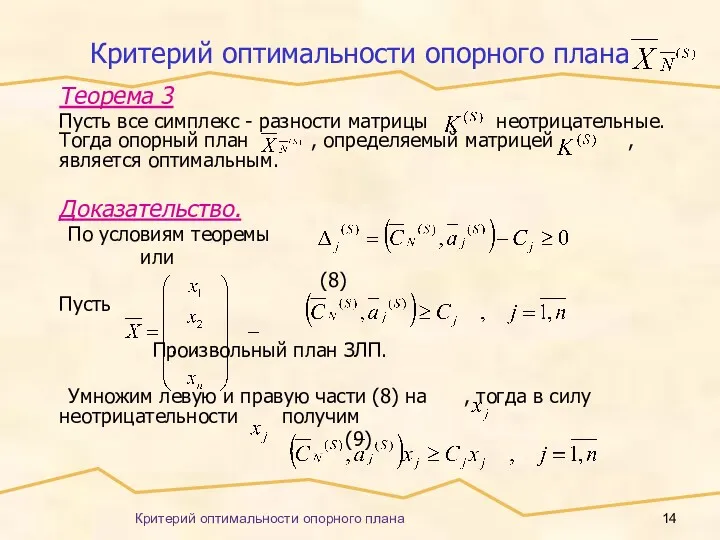
Критерий оптимальности опорного плана
Критерий оптимальности опорного плана
Теорема 3
Пусть все симплекс -
Критерий оптимальности опорного плана
Критерий оптимальности опорного плана
Теорема 3
Пусть все симплекс -
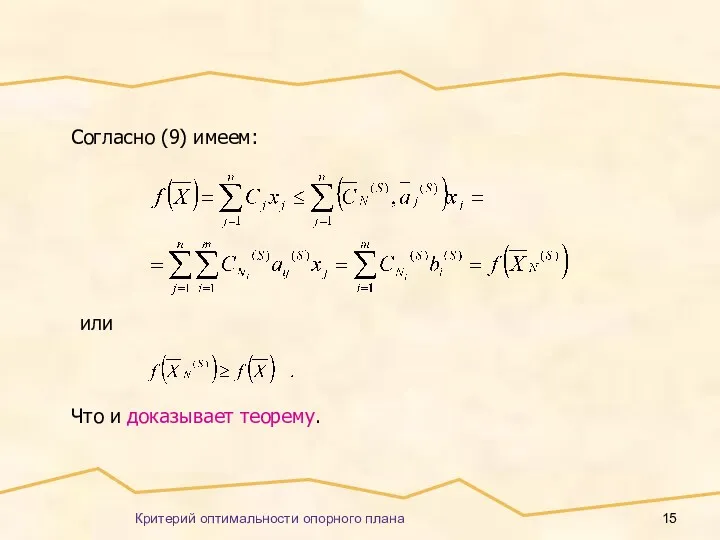
Критерий оптимальности опорного плана
Согласно (9) имеем:
или
Что и доказывает теорему.
Критерий оптимальности опорного плана
Согласно (9) имеем:
или
Что и доказывает теорему.
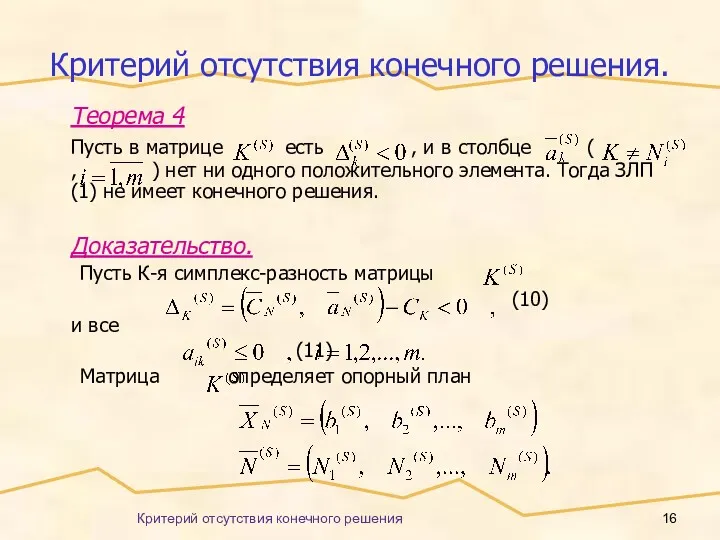
Критерий отсутствия конечного решения
Критерий отсутствия конечного решения.
Теорема 4
Пусть в матрице есть
Критерий отсутствия конечного решения
Критерий отсутствия конечного решения.
Теорема 4
Пусть в матрице есть
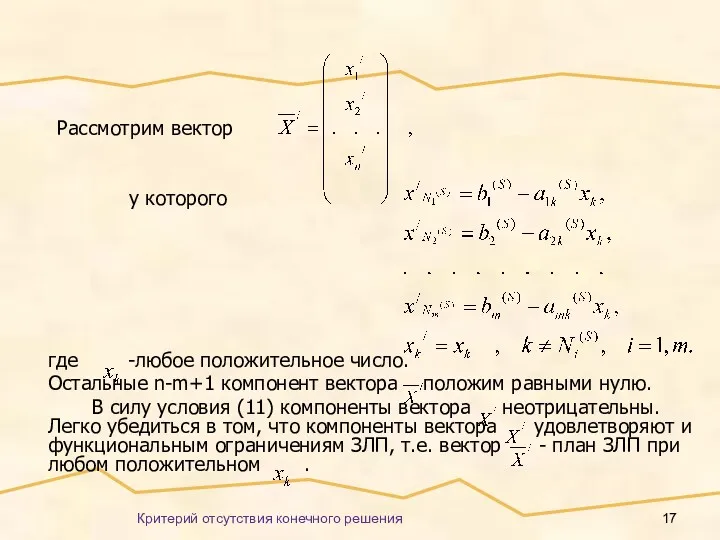
Критерий отсутствия конечного решения
Рассмотрим вектор
у которого
где -любое положительное число.
Остальные n-m+1 компонент
Критерий отсутствия конечного решения
Рассмотрим вектор
у которого
где -любое положительное число.
Остальные n-m+1 компонент
Критерий отсутствия конечного решения
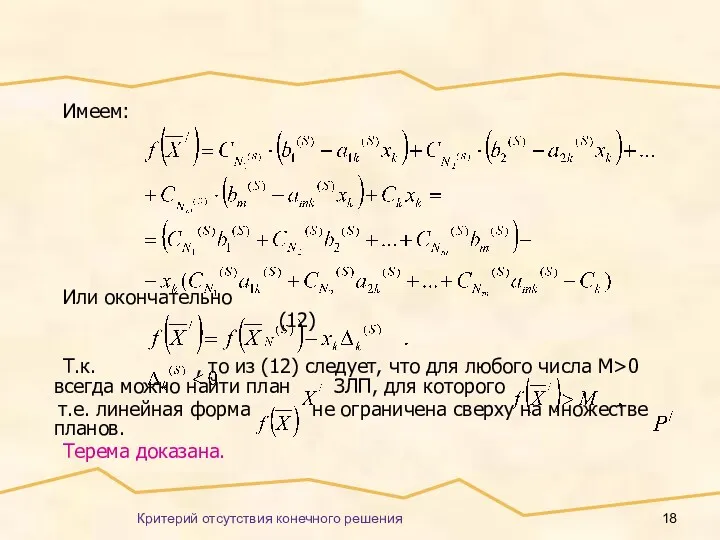
Имеем:
Или окончательно
(12)
Т.к. , то из (12) следует, что
Критерий отсутствия конечного решения
Имеем:
Или окончательно
(12)
Т.к. , то из (12) следует, что
ПРИМЕР №1
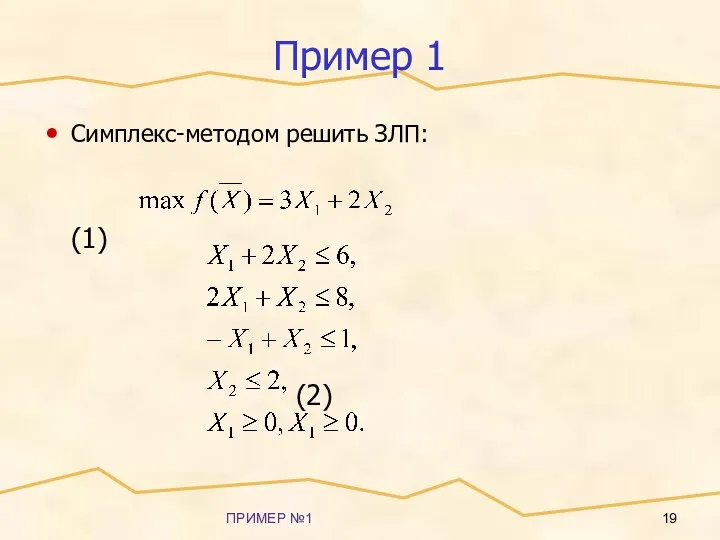
Пример 1
Симплекс-методом решить ЗЛП:
(1)
(2)
ПРИМЕР №1
Пример 1
Симплекс-методом решить ЗЛП:
(1)
(2)
ПРИМЕР №1
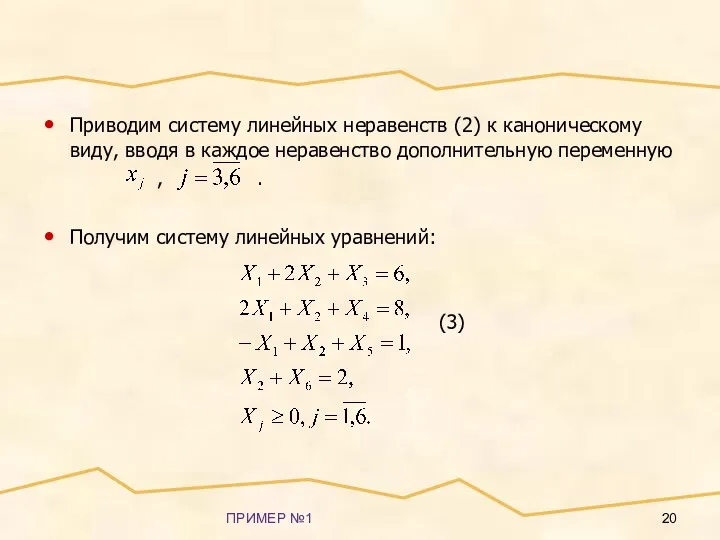
Приводим систему линейных неравенств (2) к каноническому виду, вводя в
ПРИМЕР №1
Приводим систему линейных неравенств (2) к каноническому виду, вводя в
ПРИМЕР №1
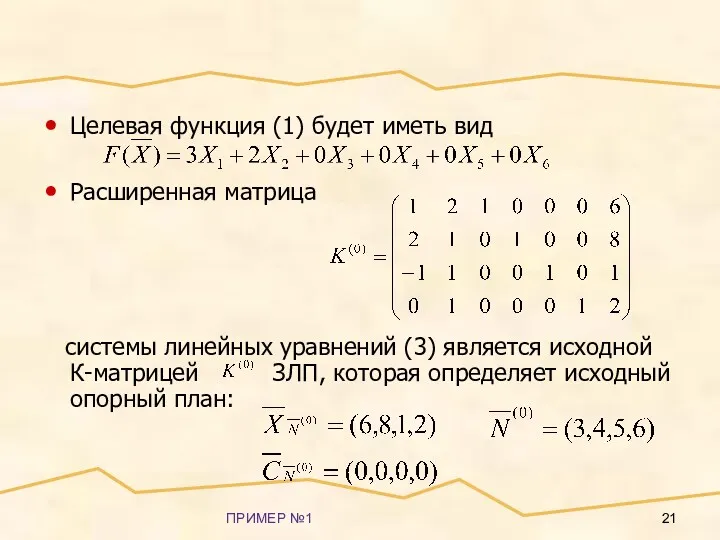
Целевая функция (1) будет иметь вид
Расширенная матрица
системы линейных уравнений
ПРИМЕР №1
Целевая функция (1) будет иметь вид
Расширенная матрица
системы линейных уравнений
ПРИМЕР №1
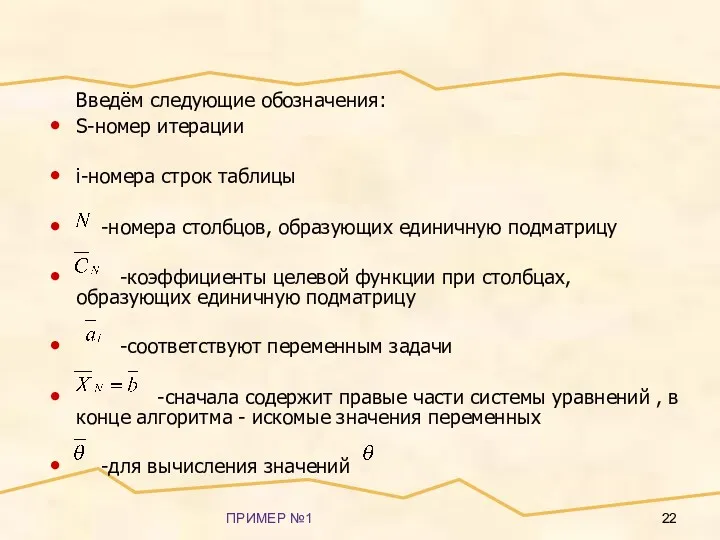
Введём следующие обозначения:
S-номер итерации
i-номера строк таблицы
-номера столбцов, образующих
ПРИМЕР №1
Введём следующие обозначения:
S-номер итерации
i-номера строк таблицы
-номера столбцов, образующих
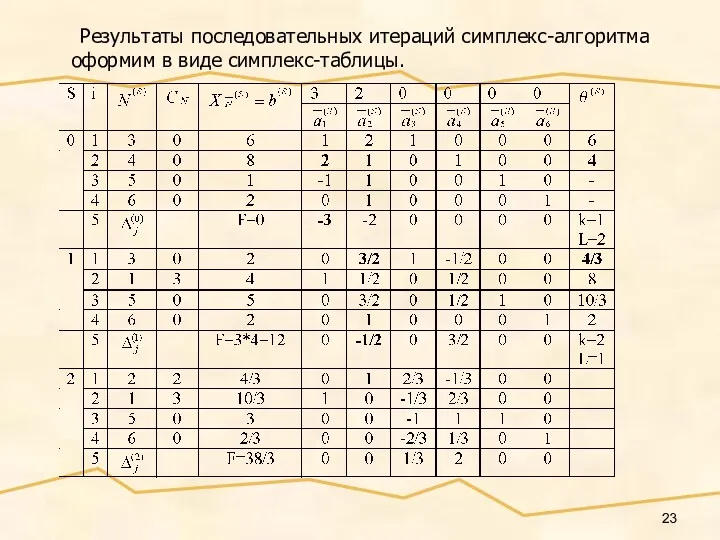
Результаты последовательных итераций симплекс-алгоритма оформим в виде симплекс-таблицы.
Результаты последовательных итераций симплекс-алгоритма оформим в виде симплекс-таблицы.
ПРИМЕР №1
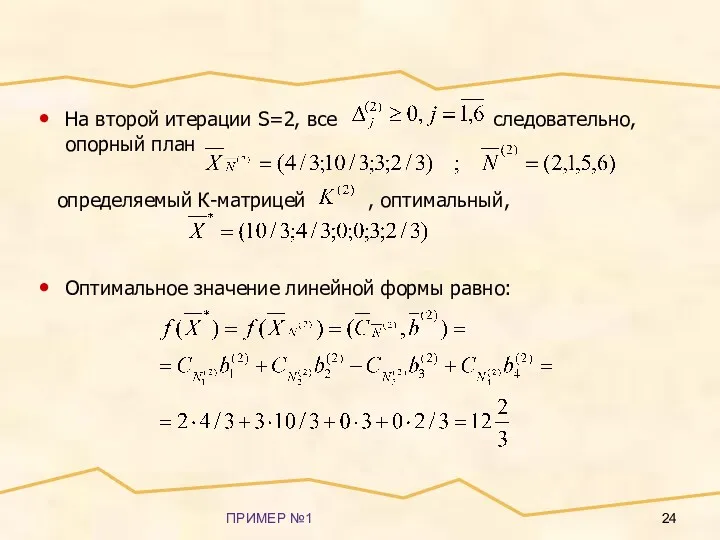
На второй итерации S=2, все следовательно, опорный план
определяемый К-матрицей ,
ПРИМЕР №1
На второй итерации S=2, все следовательно, опорный план
определяемый К-матрицей ,
ПРИМЕР №2
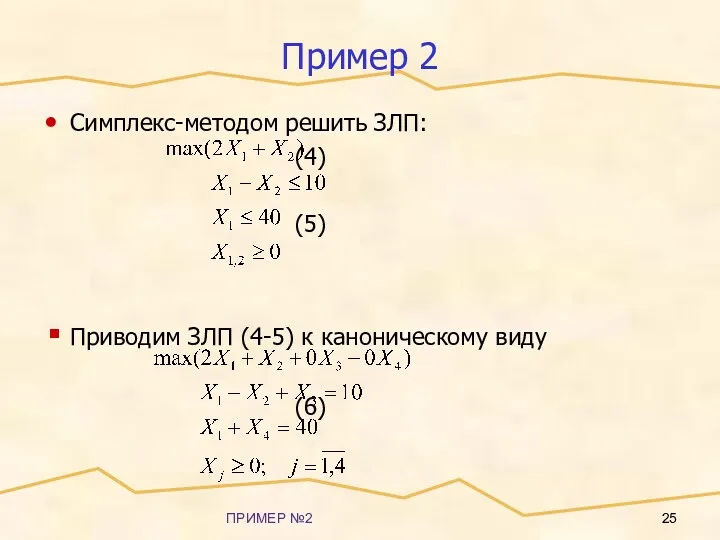
Пример 2
Симплекс-методом решить ЗЛП:
(4)
(5)
Приводим ЗЛП (4-5) к каноническому виду
(6)
ПРИМЕР №2
Пример 2
Симплекс-методом решить ЗЛП:
(4)
(5)
Приводим ЗЛП (4-5) к каноническому виду
(6)
ПРИМЕР №2
Результаты последовательных итераций запишем в симплекс-таблицу.
ПРИМЕР №2
Результаты последовательных итераций запишем в симплекс-таблицу.
 Трудности адаптации первоклассников в школе.
Трудности адаптации первоклассников в школе. Осенние именинники 2 класс
Осенние именинники 2 класс Литовская сказка Мальчик золотой хохолок и девочка золотая коса
Литовская сказка Мальчик золотой хохолок и девочка золотая коса Безусловное принятие
Безусловное принятие Виталий Бианки. Лесные домишки
Виталий Бианки. Лесные домишки Снижение рисков возникновения нарушений безопасности движения поездов при производстве маневровой и поездной работы
Снижение рисков возникновения нарушений безопасности движения поездов при производстве маневровой и поездной работы Adobe Photoshop. Коррекция изображений
Adobe Photoshop. Коррекция изображений Discovery & IOC Phase Network Architecture
Discovery & IOC Phase Network Architecture Технико-технологические требования по предупреждению газонефтеводопроявлений
Технико-технологические требования по предупреждению газонефтеводопроявлений Артериальная гипертония
Артериальная гипертония Презентация Все профессии важны
Презентация Все профессии важны Имидж педагога в новой образовательной среде
Имидж педагога в новой образовательной среде Кричалки и разминки для детей дошкольного возраста презентация для педагогов и родителей.
Кричалки и разминки для детей дошкольного возраста презентация для педагогов и родителей. Трудный ребенок
Трудный ребенок Технология успешного трудоустройства
Технология успешного трудоустройства Коляда
Коляда С 23 февраля, дорогие наши мальчики
С 23 февраля, дорогие наши мальчики Бедность и богатство
Бедность и богатство День Российской науки – 8 февраля
День Российской науки – 8 февраля Игры для автоматизации звука Ш
Игры для автоматизации звука Ш Опасности, травмы и заболевания, обусловленные неправильными действиями туристов
Опасности, травмы и заболевания, обусловленные неправильными действиями туристов Тайна имени
Тайна имени Оборудование для приготовления и продажи напитков
Оборудование для приготовления и продажи напитков Gravity Falls
Gravity Falls ВКР: Разработка системы автоматизации добычи и промыслового сбора нефти и газа на месторождении
ВКР: Разработка системы автоматизации добычи и промыслового сбора нефти и газа на месторождении Заикание с позиции логопсихокоррекционного подхода
Заикание с позиции логопсихокоррекционного подхода Программы реновации жилья – общая характеристика, возможность тиражирования опыта
Программы реновации жилья – общая характеристика, возможность тиражирования опыта Технология каменных работ
Технология каменных работ