- Синтез систем автоматического управления

Содержание
- 2. ПЛАН Вводные замечания Синтез САУ по ЛАФЧХ Построение низкочастотного участка ЛАФЧХ Построение среднечастотного участка ЛАФЧХ Построение
- 3. 1. Вводные замечания Синтез – целенаправленный выбор структуры САУ и расчет ее параметров таким образом, чтобы
- 4. 2. Синтез САУ по ЛАФЧХ Этот метод прост, удобен, нагляден и сводится к выполнению следующих этапов:
- 5. 3. Построение низкочастотного участка ЛАФЧХ Построение желаемой ЛАФЧХ Lж(ω) по данным ТЗ. Чтобы синтезировать систему в
- 6. Низкочастотный участок - определяет точность САУ и он должен проходить выше контрольной точки с координатами ω=ωk,
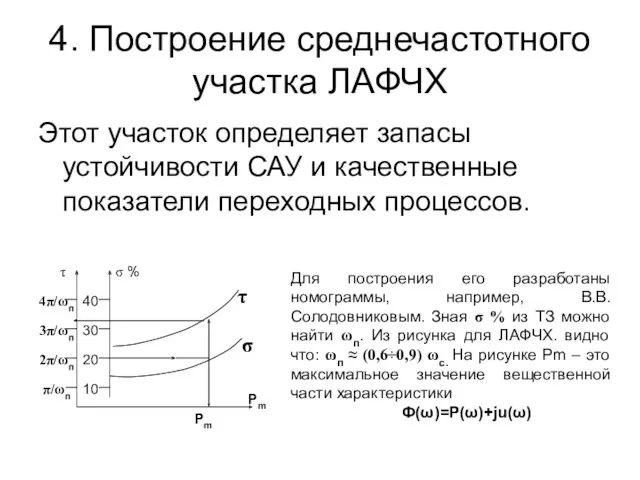
- 7. 4. Построение среднечастотного участка ЛАФЧХ Этот участок определяет запасы устойчивости САУ и качественные показатели переходных процессов.
- 8. Re
- 9. 5. Высокочастотный участок Высокочастотный участок – мало влияет на устойчивость и h(t), и для упрощения синтеза
- 10. ПРИМЕР Пусть в следящей системе нужно обеспечить при x(t)=0,5sin0,5t. максимальную ошибку εm≤10΄ - угловых минут; перерегулирования
- 11. частота контрольной точки ωk=0,5 1/cек. Чтобы система обладала заданной точностью низкочастотный участок должен проходить выше контрольной
- 12. 2. Найдем положение среднечастотного участка. Для этого по номограмме при σ≤25% найдем: Откуда частота положительности, т.е.
- 13. Построим далее Lж(ω), задавшись запасами устойчивости по амплитуде ∆L=±10дб (эти запасы ограничат нам протяженность среднечастотного участка)
- 14. 6. Синтез последовательных КУ. Последовательные КУ включаются последовательно в прямой канал системы. Как видно wж(s)=wку(s)*wр(s) т.е.
- 15. Т.о. синтез последовательного КУ выполняется в следующем порядке: Строят Lж(ω) по данным ТЗ; Строят Lр(ω) после
- 16. ПРИМЕР Пусть: Построим Lр(ω) Lp(ω)
- 17. При построении учтем, что низкочастотный участок с наклоном -20бд/дек пересечет ось частот на частоте ω=100, а
- 18. Построим далее Lж(ω) по данным ТЗ как это обсуждалось выше и предположим она выглядит как показано
- 20. Скачать презентацию
ПЛАН
Вводные замечания
Синтез САУ по ЛАФЧХ
Построение низкочастотного участка ЛАФЧХ
Построение среднечастотного участка ЛАФЧХ
Построение
ПЛАН
Вводные замечания
Синтез САУ по ЛАФЧХ
Построение низкочастотного участка ЛАФЧХ
Построение среднечастотного участка ЛАФЧХ
Построение
1. Вводные замечания
Синтез – целенаправленный выбор структуры САУ и расчет ее
1. Вводные замечания
Синтез – целенаправленный выбор структуры САУ и расчет ее
2. Синтез САУ по ЛАФЧХ
Этот метод прост, удобен, нагляден и
2. Синтез САУ по ЛАФЧХ
Этот метод прост, удобен, нагляден и
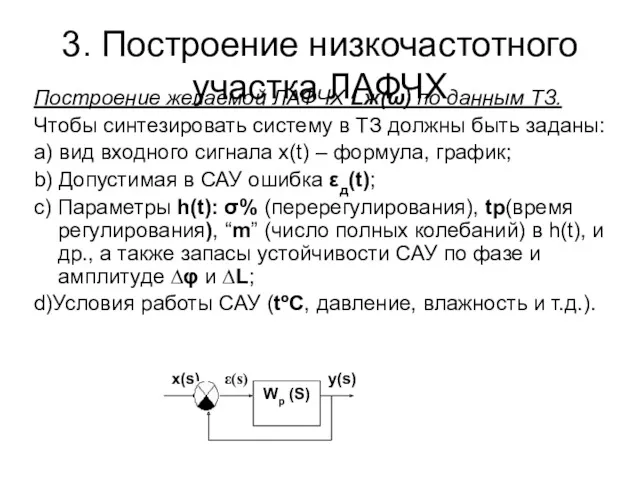
3. Построение низкочастотного участка ЛАФЧХ
Построение желаемой ЛАФЧХ Lж(ω) по данным ТЗ.
Чтобы
3. Построение низкочастотного участка ЛАФЧХ
Построение желаемой ЛАФЧХ Lж(ω) по данным ТЗ.
Чтобы
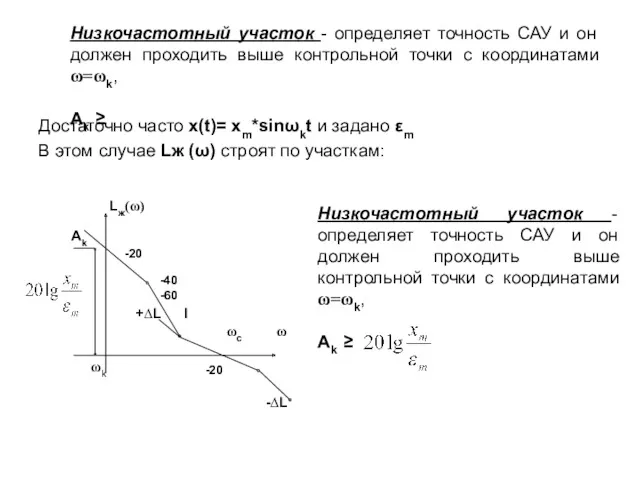
Низкочастотный участок - определяет точность САУ и он должен проходить выше
Низкочастотный участок - определяет точность САУ и он должен проходить выше
4. Построение среднечастотного участка ЛАФЧХ
Этот участок определяет запасы устойчивости САУ и
4. Построение среднечастотного участка ЛАФЧХ
Этот участок определяет запасы устойчивости САУ и
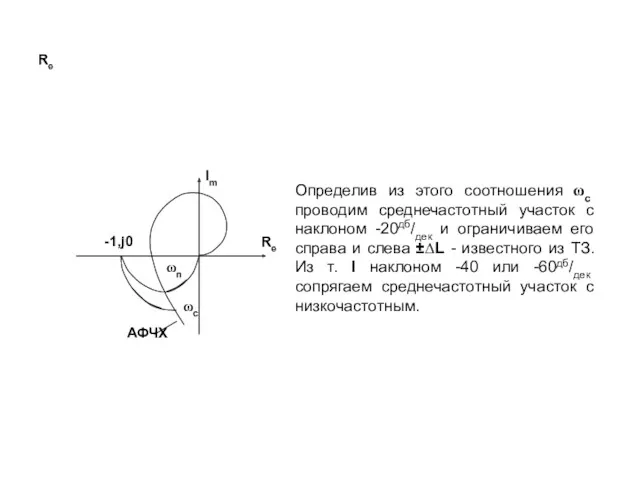
Re
Re
5. Высокочастотный участок
Высокочастотный участок – мало влияет на устойчивость и h(t),
5. Высокочастотный участок
Высокочастотный участок – мало влияет на устойчивость и h(t),
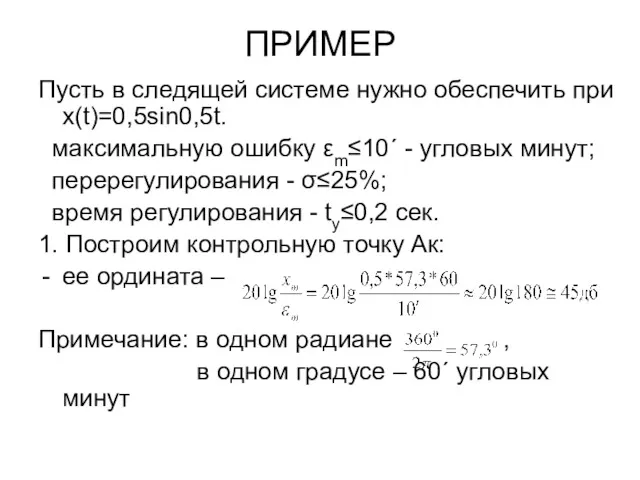
ПРИМЕР
Пусть в следящей системе нужно обеспечить при x(t)=0,5sin0,5t.
максимальную ошибку εm≤10΄
ПРИМЕР
Пусть в следящей системе нужно обеспечить при x(t)=0,5sin0,5t.
максимальную ошибку εm≤10΄
частота контрольной точки ωk=0,5 1/cек.
Чтобы система обладала заданной точностью низкочастотный участок
частота контрольной точки ωk=0,5 1/cек.
Чтобы система обладала заданной точностью низкочастотный участок
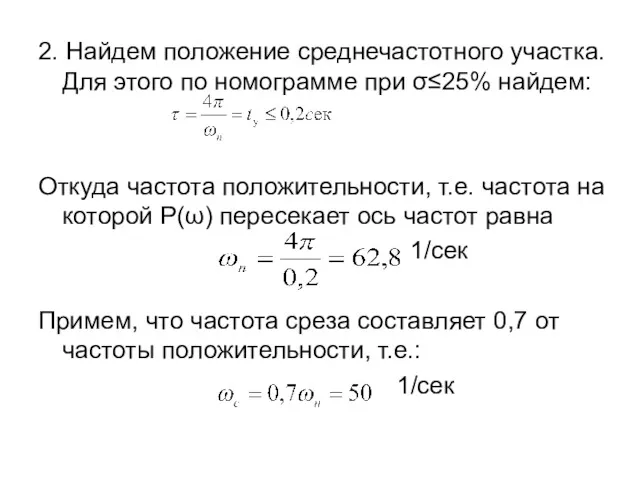
2. Найдем положение среднечастотного участка. Для этого по номограмме при σ≤25%
2. Найдем положение среднечастотного участка. Для этого по номограмме при σ≤25%
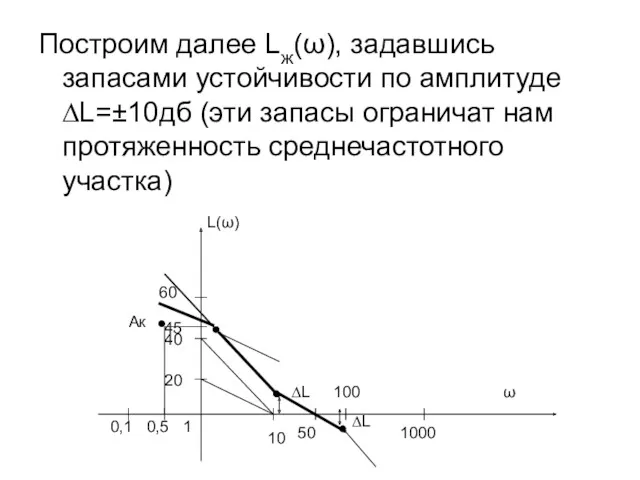
Построим далее Lж(ω), задавшись запасами устойчивости по амплитуде ∆L=±10дб (эти запасы
Построим далее Lж(ω), задавшись запасами устойчивости по амплитуде ∆L=±10дб (эти запасы
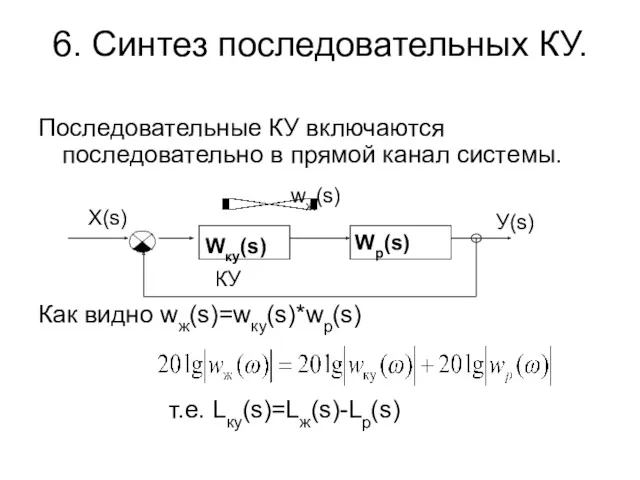
6. Синтез последовательных КУ.
Последовательные КУ включаются последовательно в прямой канал
6. Синтез последовательных КУ.
Последовательные КУ включаются последовательно в прямой канал
Т.о. синтез последовательного КУ выполняется в следующем порядке:
Строят Lж(ω) по данным
Т.о. синтез последовательного КУ выполняется в следующем порядке:
Строят Lж(ω) по данным
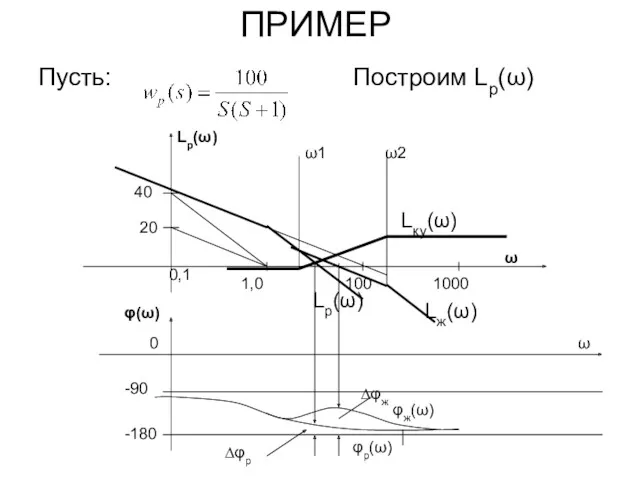
ПРИМЕР
Пусть: Построим Lр(ω)
Lp(ω)
ПРИМЕР
Пусть: Построим Lр(ω)
Lp(ω)
При построении учтем, что низкочастотный участок с наклоном -20бд/дек пересечет ось
При построении учтем, что низкочастотный участок с наклоном -20бд/дек пересечет ось
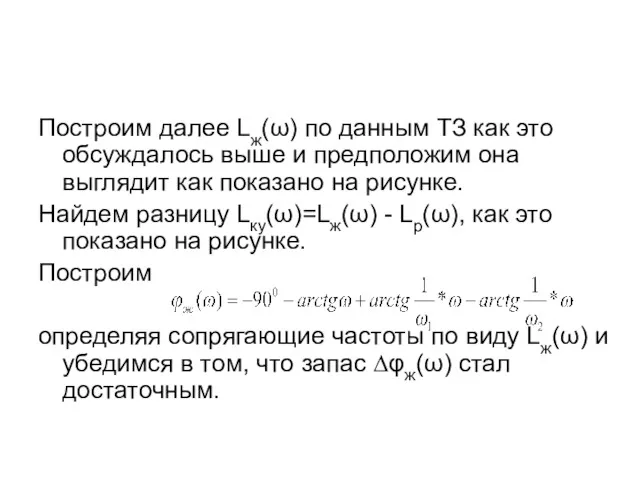
Построим далее Lж(ω) по данным ТЗ как это обсуждалось выше и
Построим далее Lж(ω) по данным ТЗ как это обсуждалось выше и
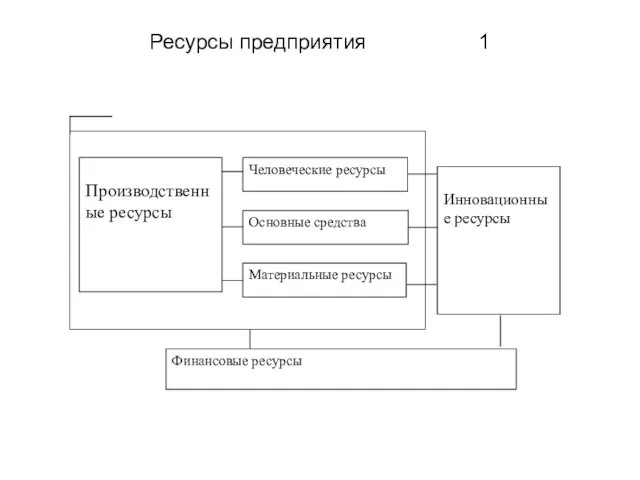 Ресурсы предприятия
Ресурсы предприятия 8 Июля - День семьи, любви и верности
8 Июля - День семьи, любви и верности Познавательное развитие дошкольников с задержкой психического развития
Познавательное развитие дошкольников с задержкой психического развития Применение игровой технологии при обобщении учебного материала на уроках географии.
Применение игровой технологии при обобщении учебного материала на уроках географии. Детско-юношеский клуб Мечтатели
Детско-юношеский клуб Мечтатели Древнейший период развития края. Старая Ладога
Древнейший период развития края. Старая Ладога Свет и цвет в фотографии
Свет и цвет в фотографии презентация Озеленения школьных помещений
презентация Озеленения школьных помещений Ишемическая болезнь сердца. Часть 1. Атеросклероз. Стенокардия
Ишемическая болезнь сердца. Часть 1. Атеросклероз. Стенокардия Юрий Трифонов. Жизнь и творчество
Юрий Трифонов. Жизнь и творчество Аттестация испытательного оборудования. (Лекция 21)
Аттестация испытательного оборудования. (Лекция 21) Цветы в технике квиллинга
Цветы в технике квиллинга Новое слово в маркетинге. Маркетинг. План. Системы
Новое слово в маркетинге. Маркетинг. План. Системы Энергетические показатели ТЭС. Лекция 2
Энергетические показатели ТЭС. Лекция 2 Неопределенная форма глагола. 3 класс
Неопределенная форма глагола. 3 класс В помощь психологу ДОУ
В помощь психологу ДОУ Родительское собрание в подготовительной группе
Родительское собрание в подготовительной группе ПРЕЗЕНТАЦИЯ ВИКТОРИНА ПО ПОЖАРНОЙ БЕЗОПАСНОСТИ
ПРЕЗЕНТАЦИЯ ВИКТОРИНА ПО ПОЖАРНОЙ БЕЗОПАСНОСТИ Үгінді печенье
Үгінді печенье Что такое программирование
Что такое программирование Происхождение жизни на Земле. Космические и планетарные условия. Физико-химические условия
Происхождение жизни на Земле. Космические и планетарные условия. Физико-химические условия Движение. Виды движений
Движение. Виды движений Внутрикостный инъектор
Внутрикостный инъектор Прихват бурильной колонны и методы борьбы с ним. Семинар 12
Прихват бурильной колонны и методы борьбы с ним. Семинар 12 интерактивная презентация к уроку Массовая доля элемента в молекуле
интерактивная презентация к уроку Массовая доля элемента в молекуле The Grounds For Judicial Review
The Grounds For Judicial Review Женщины в жизни Александра Сергеевича Пушкина
Женщины в жизни Александра Сергеевича Пушкина Волшебные слова
Волшебные слова