- Синтез систем автоматического управления. Исполнительные устройства

Содержание
- 2. План лекции: 1. Общие сведения о синтезе САУ 2. Основные законы регулирования 2.1. Непрерывное регулирование 2.2.
- 3. С И Н Т Е З С А У - это определение структуры, состава элементов, и
- 4. 4 СИНТЕЗ САУ - это определение типа, схемы и параметров закона управления (ЗУ) или кор-ректирующего устройства
- 5. 5
- 6. КОРРЕКТИРУЮЩИМ УСТРОЙСТВОМ (КУ) называется вспомогатель-ный элемент САУ, заданный пере-даточной функцией и применяе-мый для улучшения качества ее
- 7. 7 2. ОСНОВНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ П - УПРАВЛЕНИЕ (пропорциональное): Пропорциональным называют закон регулирования, отражающий прямо пропорциональную
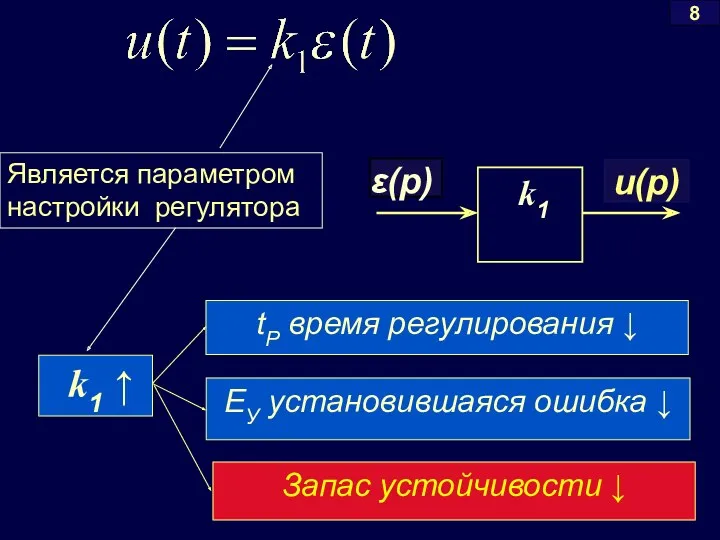
- 8. k1 ↑ 8 Является параметром настройки регулятора
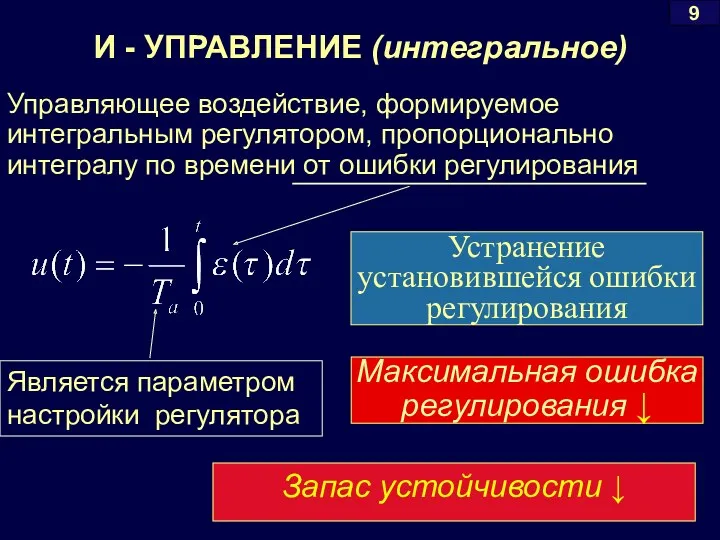
- 9. И - УПРАВЛЕНИЕ (интегральное) Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу по времени от ошибки регулирования
- 10. ПИ - УПРАВЛЕНИЕ (пропорционально - интегрирующее): Регуляторы формирующие одновременно пропорциональную и интегральную составляющую 10
- 11. 11 Число интегрирующих звеньев = Порядок астатизма Пропорциональный регулятор Интегральный регулятор
- 12. 8 12 ПД - УПРАВЛЕНИЕ (пропорционально - дифференциальное ): Помогает разрешать противоречие между точностью, быстродействием и
- 13. 13 (пропорционально – интегрально - дифференциальный): Сочетает в себе достоинства всех рассмотренных ЗУ Блок-схему ЗУ нарисовать
- 14. ε(p) u(p) Пропорциональный регулятор Интегральный регулятор Дифференциальный регулятор 14
- 15. ОУ И П 15
- 16. ОУ ПД ПИ ПИД 16
- 17. 2.2. ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ Автоматические регуляторы, у которых при непрерывном изменении входной величины регулирующий орган занимает ограниченное
- 18. 18 2b
- 19. РЕКОМЕНДАЦИИ ПО ПРИМЕНЕНИЮ ЗАКОНОВ РЕГУЛИРОВАНИЯ П – РЕГУЛЯТОР применяется для управления объектами с самовыравниваем и без
- 20. ПИ – РЕГУЛЯТОР применяется для регулирования как устойчивых, так и нейтральных объектов при больших, но плавных
- 21. Исполнительные механизмы (ИМ), являясь составной частью АСР, предназначены для перемещения регулирующего органа (РО) в соответствии с
- 22. 3.1. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ (ИМ) В зависимости от используемого вида энергии Электродвигательные Исполнительные мезанизмы Электромагнитные Гидравлические Пневматические
- 23. Пневматические исполнительные устройства (ПИМ) находят широкое применение в пожаро- и зрывоопасных производствах и характеризуются быстродействием и
- 24. 11
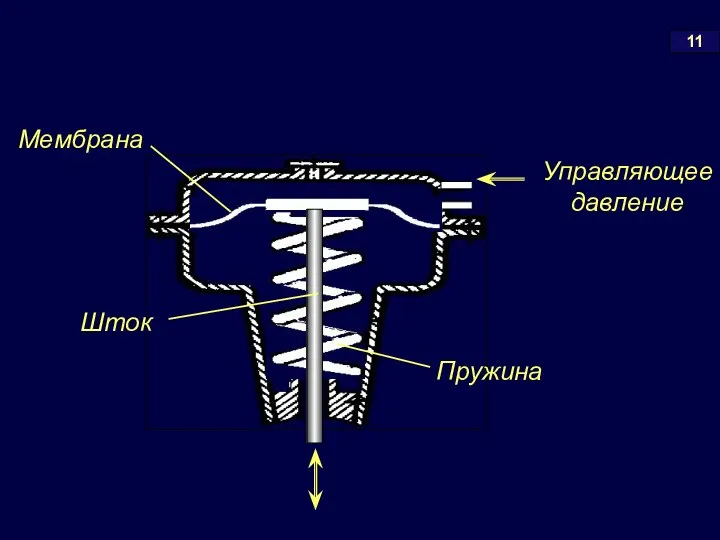
- 25. Наибольшее распространение имеют мембранные ПИМ. В них мембрана воспринимает давление сжатого воздуха и преобразует его в
- 26. Пример обозначения: МИМ-ППХ-320-25-10 мембранный исполнительный механизм прямоходный диаметр заделки мембраны 320 мм ход штока 25 мм
- 27. Регулирующий орган изменяет расход потока жидкости, газа, пара и т. п. на объекте управления, и тем
- 28. 15
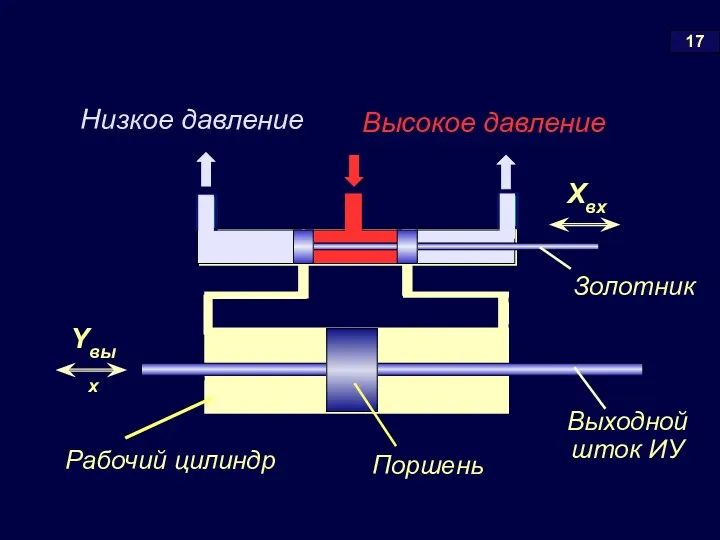
- 29. Гидравлические исполнительные устройства преобразуют энергию потока рабочей жидкости в энергию механического движения поршня (поступательное движение) или
- 30. 17 Высокое давление Низкое давление
- 31. К электромагнитным исполнительным устройствам относятся прежде всего соленоидные электроприводы, предназначенные для управления различного рода регулирующими и
- 32. Uвх Дискретное(позиционное) управление – открытие, закрытие крана, заслонки, … 19 При подаче напряжения в катушку возникает
- 33. Электродвигательные ИМ являются наиболее распространенными. По характеру движения выходного рабочего звена они подразделяются на; однооборотные, у
- 34. Основными элементами данных устройств являются: - двигатель; - путевой выключатель (конечные выключатели, датчики ОС); - редуктор
- 35. 22 Переменного тока Постоянного тока С якорным управлением С полюсным управлением Двухфазные с полым ротором Асинхронные
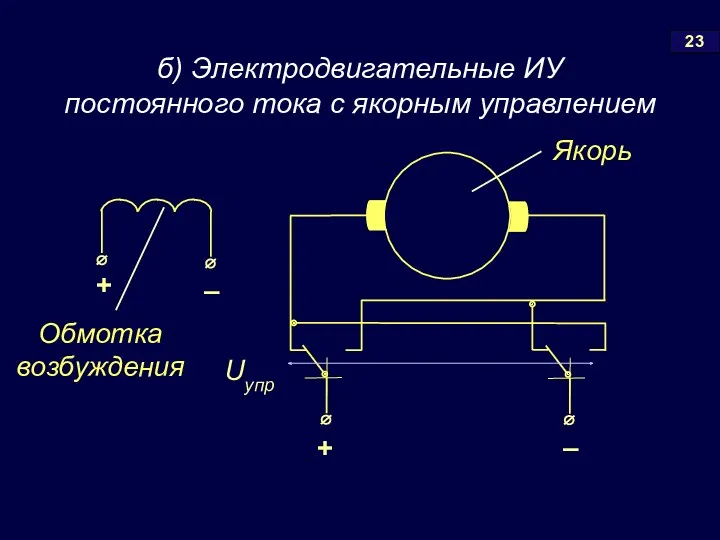
- 36. 23 б) Электродвигательные ИУ постоянного тока с якорным управлением
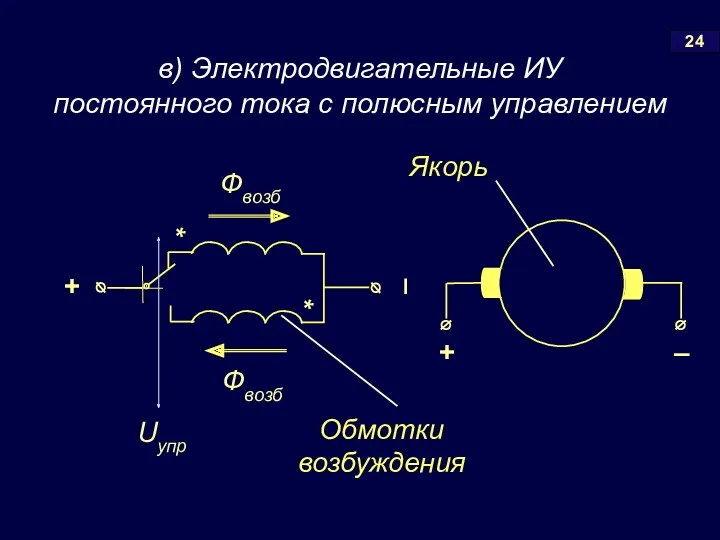
- 37. 24 в) Электродвигательные ИУ постоянного тока с полюсным управлением
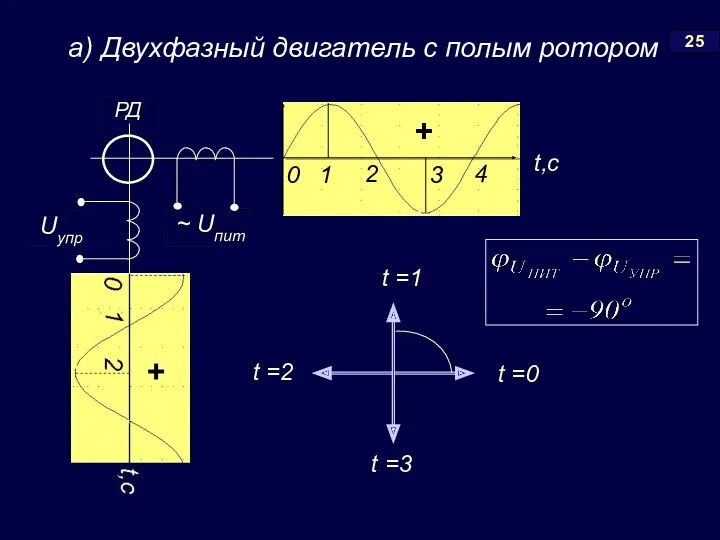
- 38. 25 t =0 t =1 t =2 t =3 РД а) Двухфазный двигатель с полым ротором
- 39. 26 t =0 t =1 t =2 t =3 РД
- 40. 27 yРО UОС UЗАД Uε α Функциональная схема электродвигательных ИУ
- 41. 28 Структурная схема электродвигательных ИУ UОС UЗАД α Uε
- 42. 29 Характеристики РО: Устройство, позволяющее изменять расход или направление потока вещества или энергии в технологическом процессе,
- 43. 30 Дроссельного типа Скоростного типа Классификация РО: Объемного типа Р О РО скоростного типа изменяют свою
- 44. РО ДРОССЕЛЬНОГО ТИПА 31 Дроссельным называется устройство, предназначенное для изменения расхода протекающих через него жидкостей или
- 45. 32 Поворотная заслонка Площадь проходного сечения S = 0.78 · Dy2 ·(1 - cosϕ)
- 46. 33 Односедельный регулирующий клапан
- 47. Регулирующий клапан состоит из трех основных блоков: корпуса, дроссельного узла и привода клапана. 34
- 49. Скачать презентацию
План лекции:
1. Общие сведения о синтезе САУ
2. Основные законы регулирования
2.1. Непрерывное регулирование
2.2.
План лекции:
1. Общие сведения о синтезе САУ
2. Основные законы регулирования
2.1. Непрерывное регулирование
2.2.
С И Н Т Е З С А У - это
С И Н Т Е З С А У - это
4
СИНТЕЗ САУ - это определение типа, схемы и параметров закона
4
СИНТЕЗ САУ - это определение типа, схемы и параметров закона
5
5
КОРРЕКТИРУЮЩИМ УСТРОЙСТВОМ (КУ) называется вспомогатель-ный элемент САУ, заданный пере-даточной функцией
КОРРЕКТИРУЮЩИМ УСТРОЙСТВОМ (КУ) называется вспомогатель-ный элемент САУ, заданный пере-даточной функцией
7
2. ОСНОВНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
П - УПРАВЛЕНИЕ (пропорциональное):
Пропорциональным называют закон регулирования,
7
2. ОСНОВНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
П - УПРАВЛЕНИЕ (пропорциональное):
Пропорциональным называют закон регулирования,
k1 ↑
8
Является параметром настройки регулятора
k1 ↑
8
Является параметром настройки регулятора
И - УПРАВЛЕНИЕ (интегральное)
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу
И - УПРАВЛЕНИЕ (интегральное)
Управляющее воздействие, формируемое интегральным регулятором, пропорционально интегралу
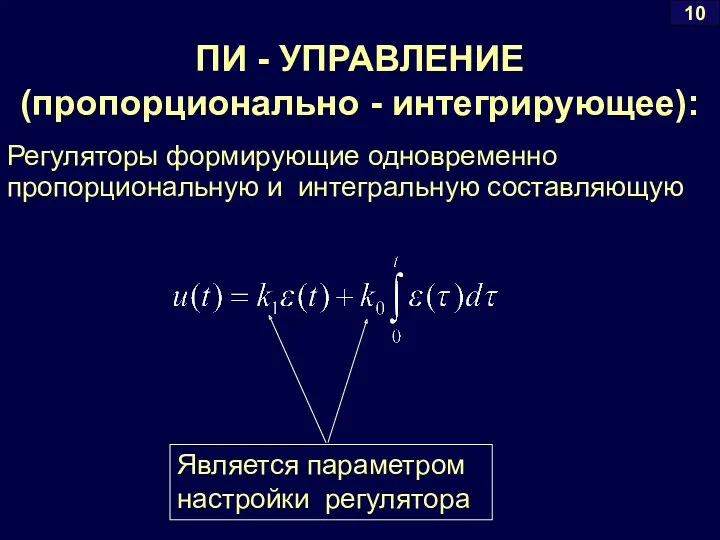
ПИ - УПРАВЛЕНИЕ
(пропорционально - интегрирующее):
Регуляторы формирующие одновременно пропорциональную и
ПИ - УПРАВЛЕНИЕ
(пропорционально - интегрирующее):
Регуляторы формирующие одновременно пропорциональную и
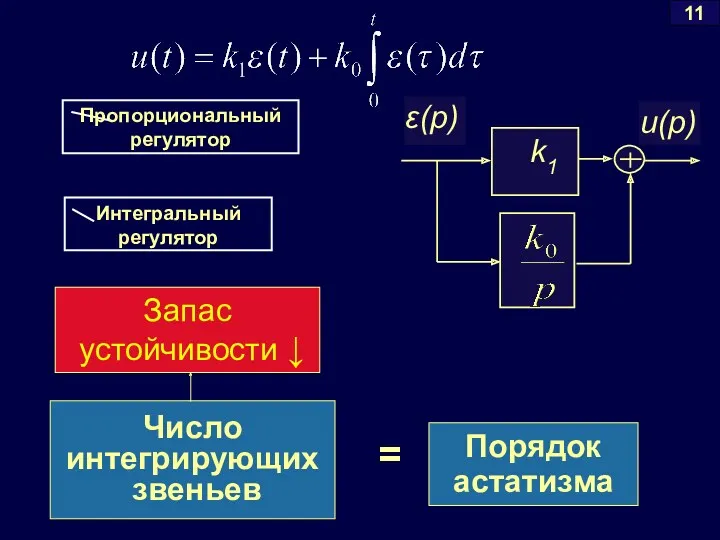
11
Число
интегрирующих
звеньев
=
Порядок
астатизма
Пропорциональный регулятор
Интегральный регулятор
11
Число
интегрирующих
звеньев
=
Порядок
астатизма
Пропорциональный регулятор
Интегральный регулятор
8
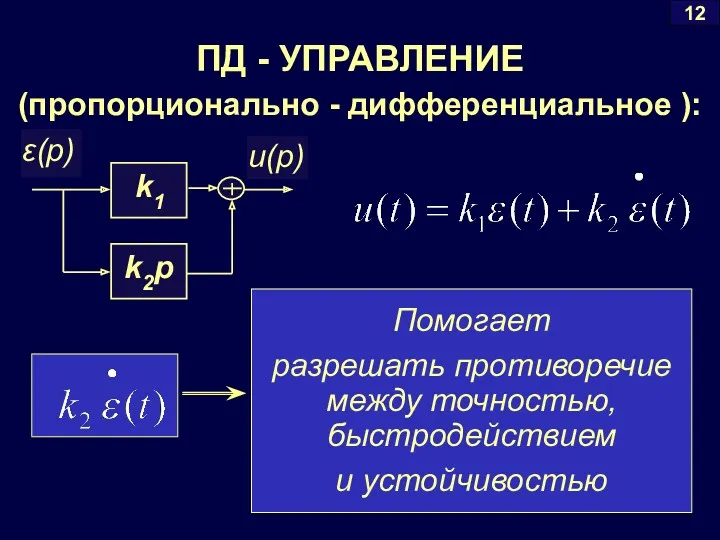
12
ПД - УПРАВЛЕНИЕ
(пропорционально - дифференциальное ):
Помогает
разрешать противоречие
между точностью,
быстродействием
и устойчивостью
8
12
ПД - УПРАВЛЕНИЕ
(пропорционально - дифференциальное ):
Помогает
разрешать противоречие
между точностью,
быстродействием
и устойчивостью
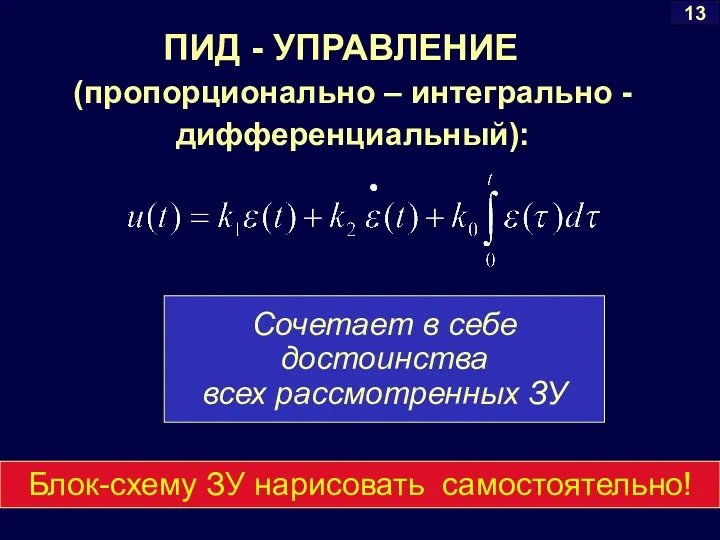
13
(пропорционально – интегрально - дифференциальный):
Сочетает в себе
достоинства
всех рассмотренных ЗУ
Блок-схему ЗУ
13
(пропорционально – интегрально - дифференциальный):
Сочетает в себе
достоинства
всех рассмотренных ЗУ
Блок-схему ЗУ
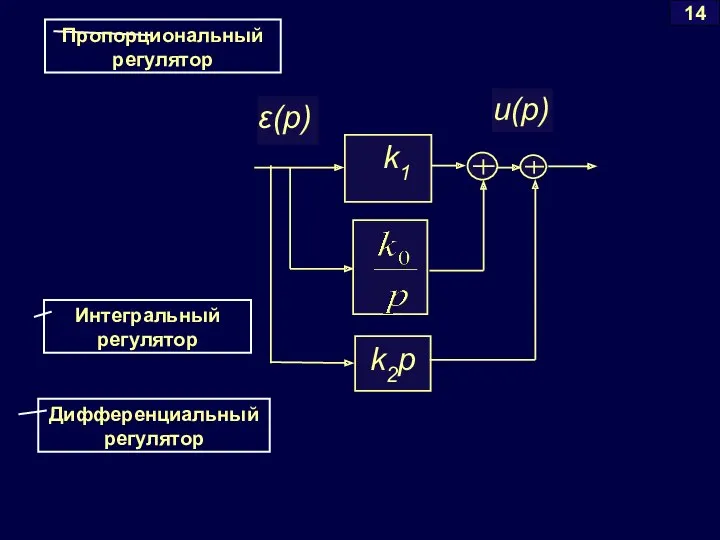
ε(p)
u(p)
Пропорциональный регулятор
Интегральный регулятор
Дифференциальный регулятор
14
ε(p)
u(p)
Пропорциональный регулятор
Интегральный регулятор
Дифференциальный регулятор
14
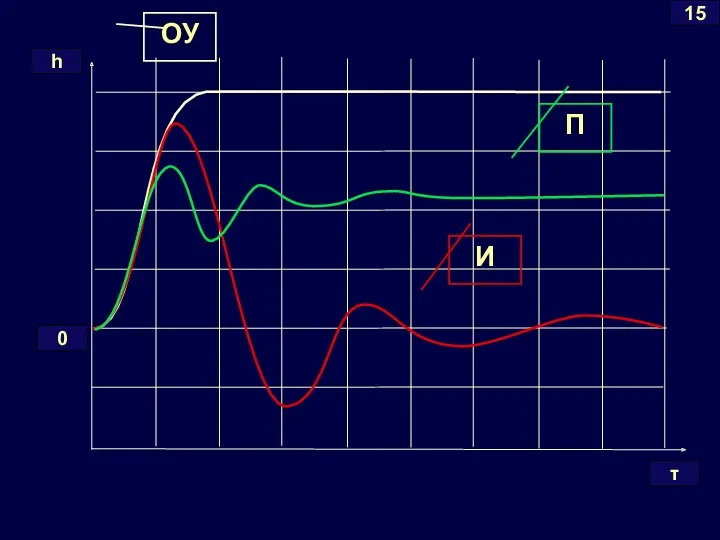
ОУ
И
П
15
ОУ
И
П
15
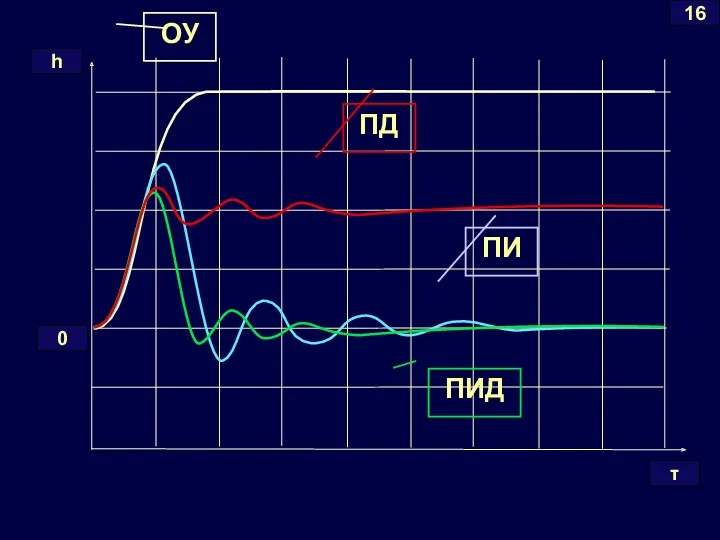
ОУ
ПД
ПИ
ПИД
16
ОУ
ПД
ПИ
ПИД
16
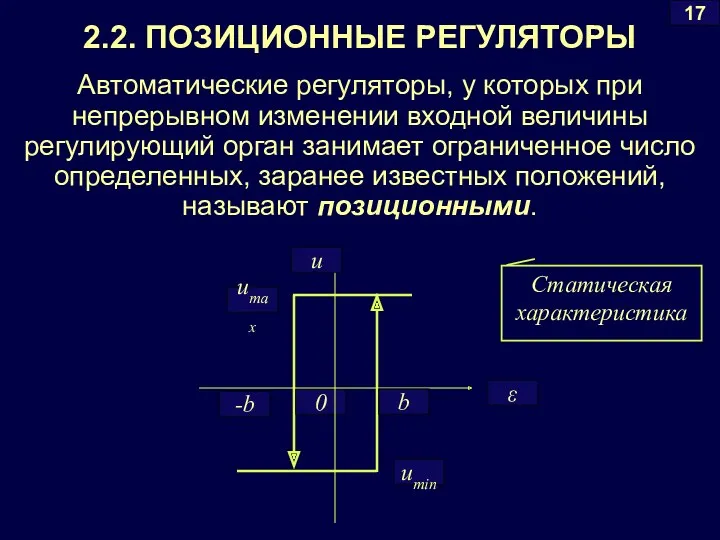
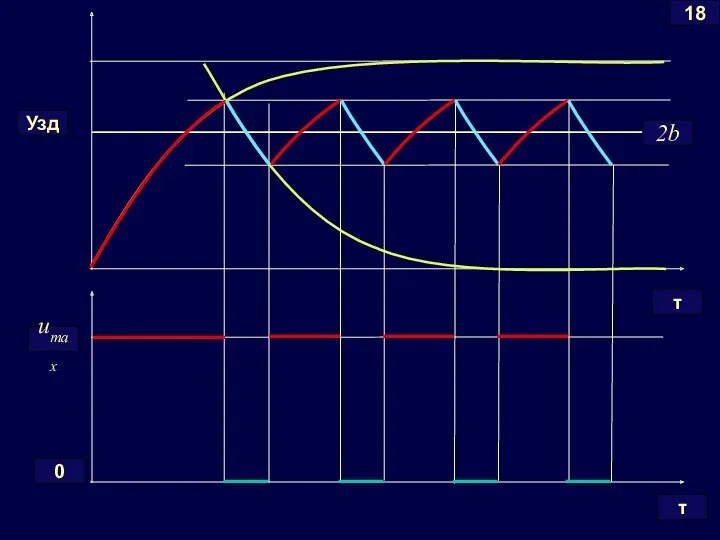
2.2. ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Автоматические регуляторы, у которых при непрерывном изменении входной величины
2.2. ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Автоматические регуляторы, у которых при непрерывном изменении входной величины
18
2b
18
2b
РЕКОМЕНДАЦИИ ПО ПРИМЕНЕНИЮ ЗАКОНОВ РЕГУЛИРОВАНИЯ
П – РЕГУЛЯТОР применяется для управления объектами
РЕКОМЕНДАЦИИ ПО ПРИМЕНЕНИЮ ЗАКОНОВ РЕГУЛИРОВАНИЯ
П – РЕГУЛЯТОР применяется для управления объектами
ПИ – РЕГУЛЯТОР применяется для регулирования как устойчивых, так и нейтральных
ПИ – РЕГУЛЯТОР применяется для регулирования как устойчивых, так и нейтральных
Исполнительные механизмы (ИМ), являясь составной частью АСР, предназначены для перемещения
Исполнительные механизмы (ИМ), являясь составной частью АСР, предназначены для перемещения
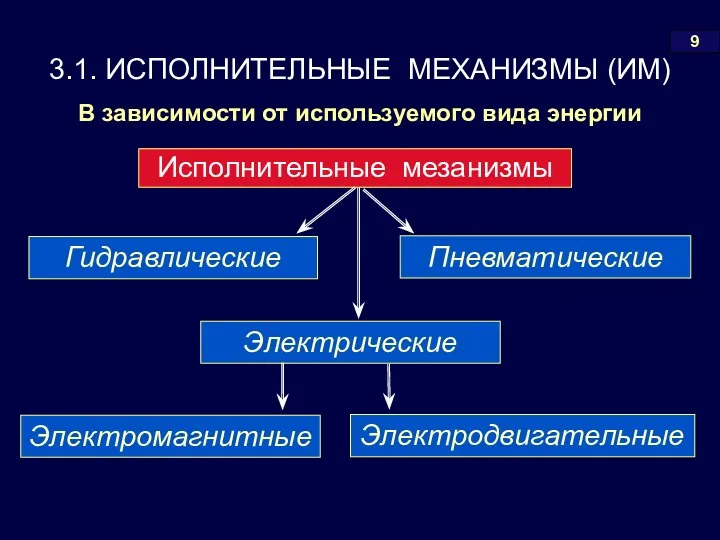
3.1. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ (ИМ)
В зависимости от используемого вида энергии
Электродвигательные
Исполнительные мезанизмы
Электромагнитные
Гидравлические
Пневматические
9
Электрические
3.1. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ (ИМ)
В зависимости от используемого вида энергии
Электродвигательные
Исполнительные мезанизмы
Электромагнитные
Гидравлические
Пневматические
9
Электрические
Пневматические исполнительные устройства (ПИМ) находят широкое применение в пожаро- и
Пневматические исполнительные устройства (ПИМ) находят широкое применение в пожаро- и
11
11
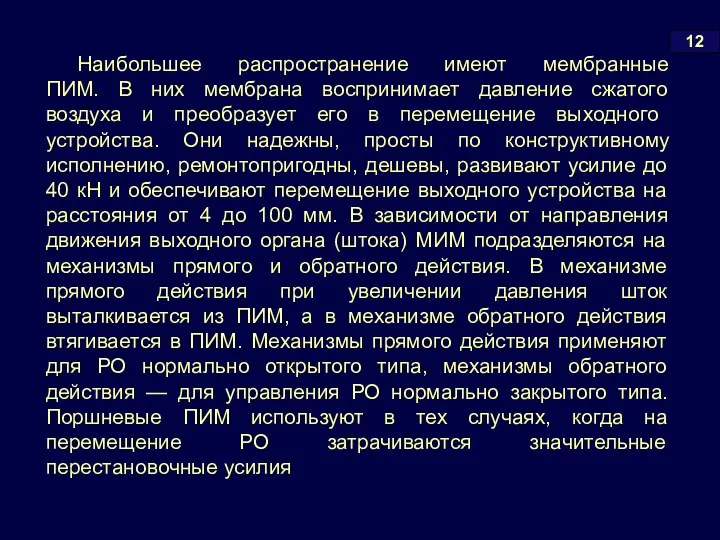
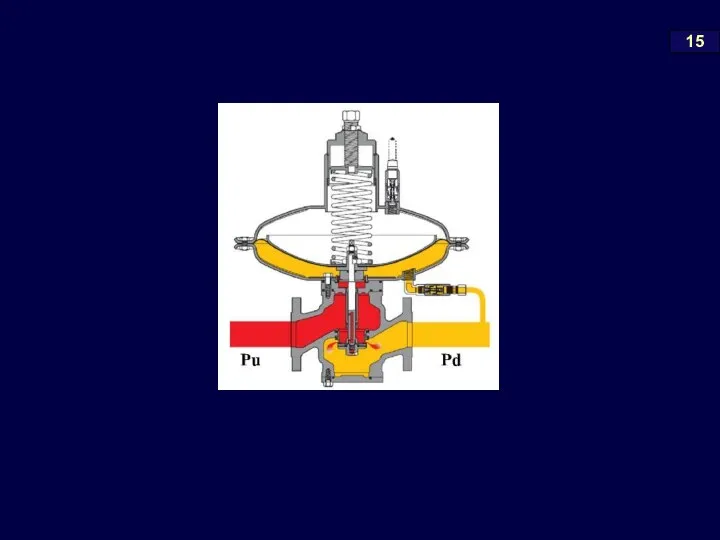
Наибольшее распространение имеют мембранные ПИМ. В них мембрана воспринимает давление сжатого
Наибольшее распространение имеют мембранные ПИМ. В них мембрана воспринимает давление сжатого
Пример обозначения: МИМ-ППХ-320-25-10
мембранный исполнительный механизм
прямоходный
диаметр заделки мембраны 320 мм
ход штока
Пример обозначения: МИМ-ППХ-320-25-10
мембранный исполнительный механизм
прямоходный
диаметр заделки мембраны 320 мм
ход штока
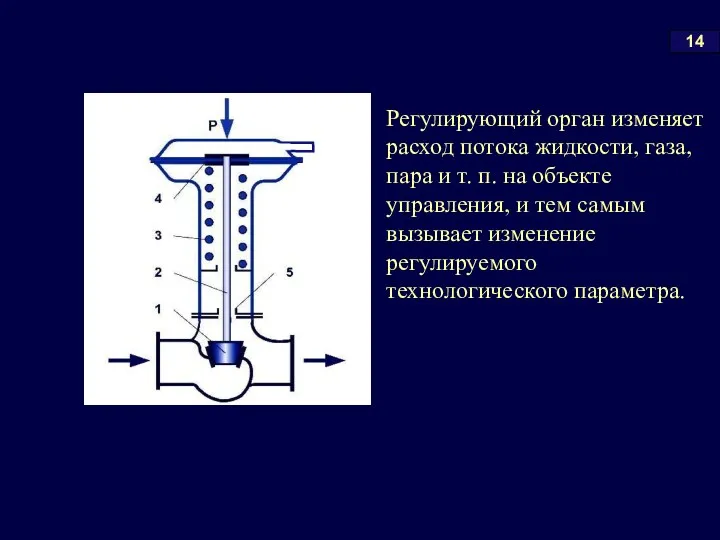
Регулирующий орган изменяет расход потока жидкости, газа, пара и т. п.
Регулирующий орган изменяет расход потока жидкости, газа, пара и т. п.
15
15
Гидравлические исполнительные устройства преобразуют энергию потока рабочей жидкости в энергию механического
Гидравлические исполнительные устройства преобразуют энергию потока рабочей жидкости в энергию механического
17
Высокое давление
Низкое давление
17
Высокое давление
Низкое давление
К электромагнитным исполнительным устройствам относятся прежде всего соленоидные электроприводы, предназначенные для
К электромагнитным исполнительным устройствам относятся прежде всего соленоидные электроприводы, предназначенные для
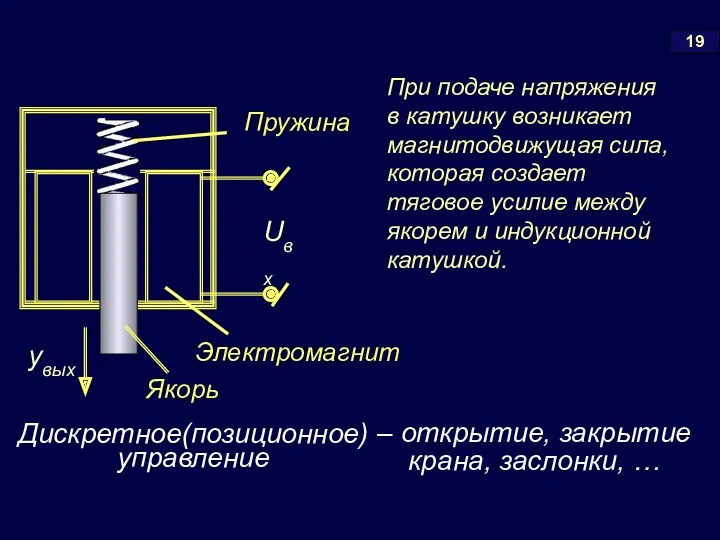
Uвх
Дискретное(позиционное)
управление
– открытие, закрытие
крана, заслонки, …
19
При подаче напряжения в катушку
Uвх
Дискретное(позиционное)
управление
– открытие, закрытие
крана, заслонки, …
19
При подаче напряжения в катушку
Электродвигательные ИМ являются наиболее распространенными. По характеру движения выходного рабочего звена
Электродвигательные ИМ являются наиболее распространенными. По характеру движения выходного рабочего звена

Основными элементами данных устройств являются:
- двигатель;
- путевой выключатель (конечные выключатели, датчики
Основными элементами данных устройств являются:
- двигатель;
- путевой выключатель (конечные выключатели, датчики

22
Переменного тока
Постоянного тока
С якорным
управлением
С полюсным
управлением
Двухфазные с
полым ротором
Асинхронные
трехфазные
22
Переменного тока
Постоянного тока
С якорным
управлением
С полюсным
управлением
Двухфазные с
полым ротором
Асинхронные
трехфазные
23
б) Электродвигательные ИУ
постоянного тока с якорным управлением
23
б) Электродвигательные ИУ
постоянного тока с якорным управлением
24
в) Электродвигательные ИУ
постоянного тока с полюсным управлением
24
в) Электродвигательные ИУ
постоянного тока с полюсным управлением
25
t =0
t =1
t =2
t =3
РД
а) Двухфазный двигатель с полым ротором
25
t =0
t =1
t =2
t =3
РД
а) Двухфазный двигатель с полым ротором
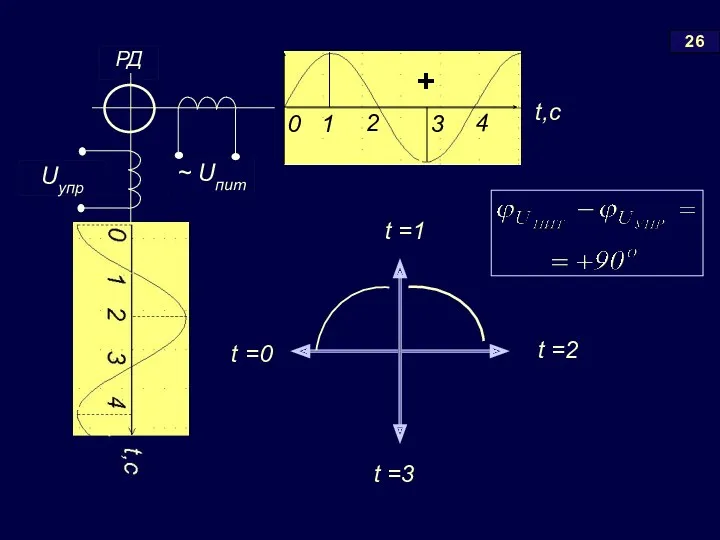
26
t =0
t =1
t =2
t =3
РД
26
t =0
t =1
t =2
t =3
РД
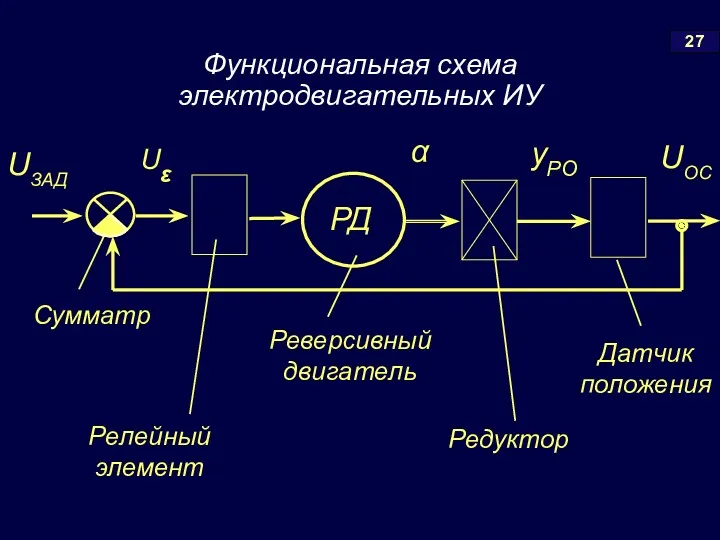
27
yРО
UОС
UЗАД
Uε
α
Функциональная схема
электродвигательных ИУ
27
yРО
UОС
UЗАД
Uε
α
Функциональная схема
электродвигательных ИУ
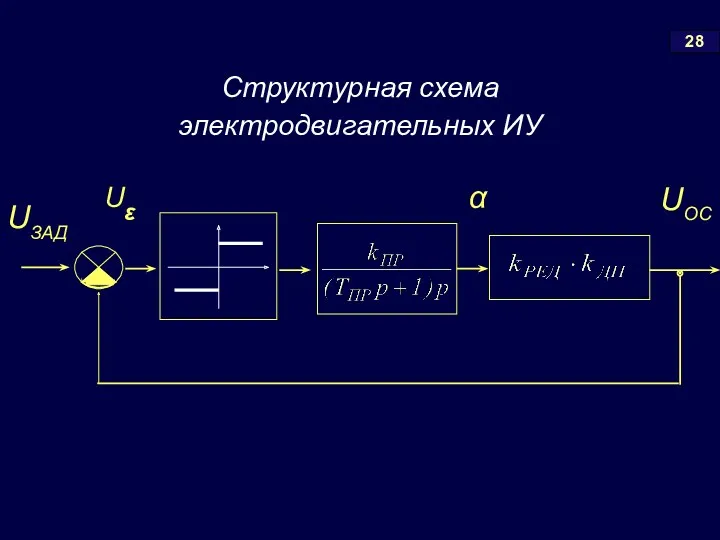
28
Структурная схема
электродвигательных ИУ
UОС
UЗАД
α
Uε
28
Структурная схема
электродвигательных ИУ
UОС
UЗАД
α
Uε
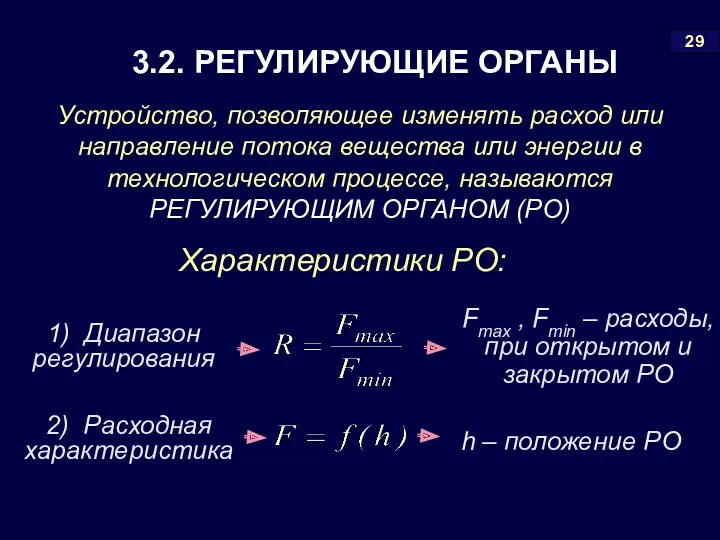
29
Характеристики РО:
Устройство, позволяющее изменять расход или направление потока вещества или энергии
29
Характеристики РО:
Устройство, позволяющее изменять расход или направление потока вещества или энергии
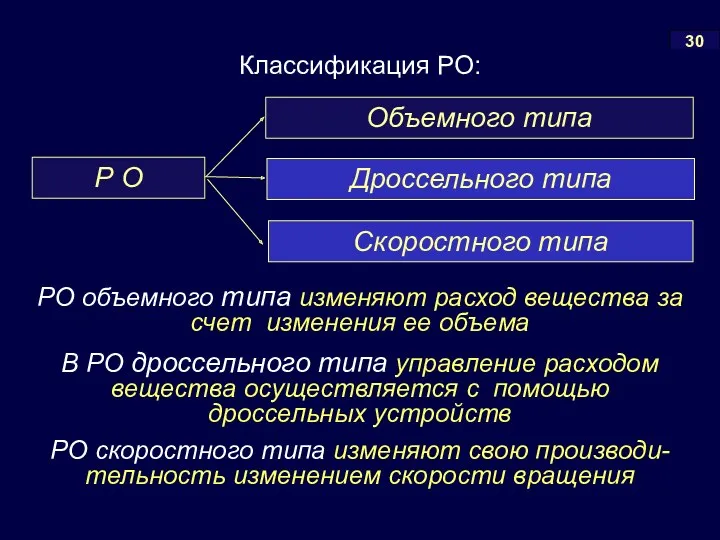
30
Дроссельного типа
Скоростного типа
Классификация РО:
Объемного типа
Р О
РО скоростного типа изменяют свою производи-
тельность
30
Дроссельного типа
Скоростного типа
Классификация РО:
Объемного типа
Р О
РО скоростного типа изменяют свою производи-
тельность
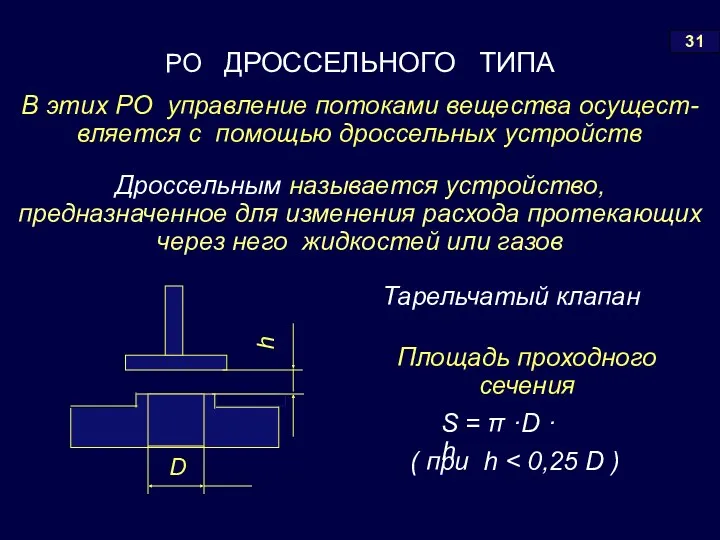
РО ДРОССЕЛЬНОГО ТИПА
31
Дроссельным называется устройство, предназначенное для изменения расхода протекающих
РО ДРОССЕЛЬНОГО ТИПА
31
Дроссельным называется устройство, предназначенное для изменения расхода протекающих
32
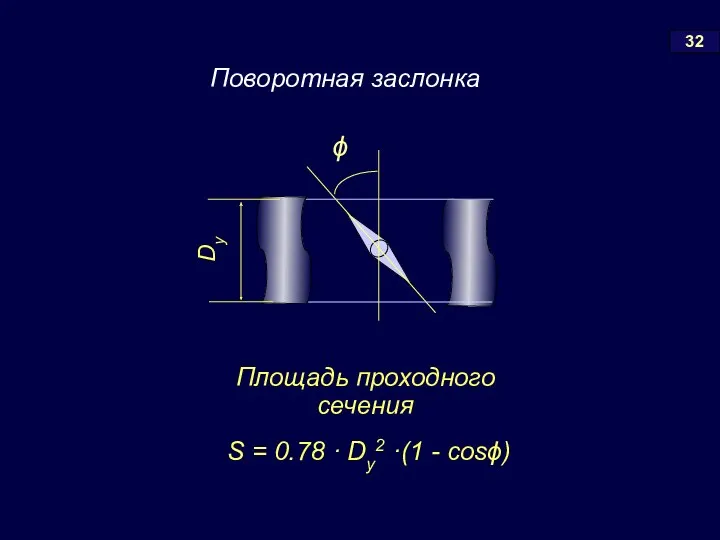
Поворотная заслонка
Площадь проходного
сечения
S = 0.78 · Dy2 ·(1 - cosϕ)
32
Поворотная заслонка
Площадь проходного
сечения
S = 0.78 · Dy2 ·(1 - cosϕ)
33
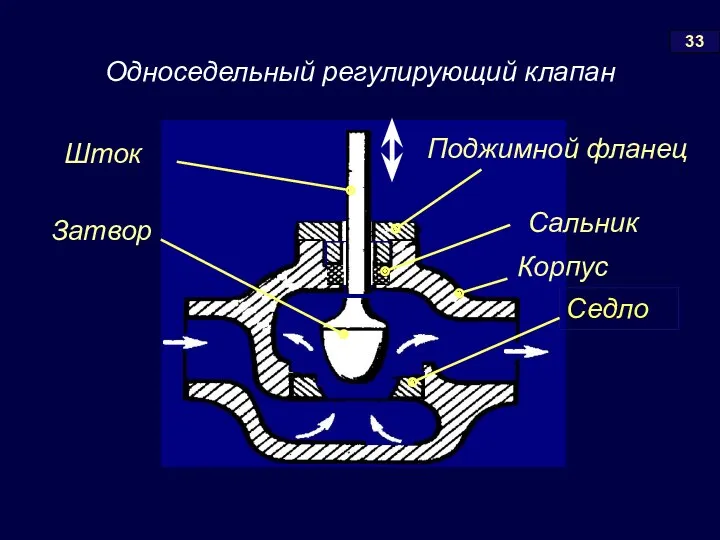
Односедельный регулирующий клапан
33
Односедельный регулирующий клапан
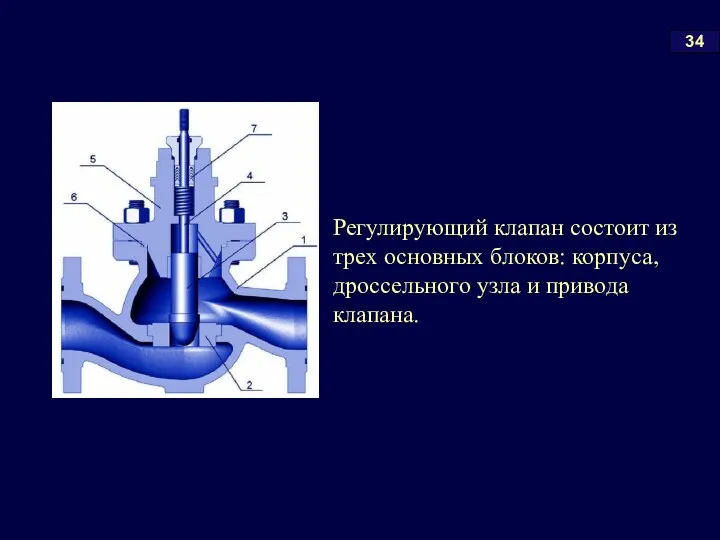
Регулирующий клапан состоит из трех основных блоков: корпуса, дроссельного узла и
Регулирующий клапан состоит из трех основных блоков: корпуса, дроссельного узла и
 Гражданское право - определение, структура, принципы, методы. Правоотношение - определение, виды, структура
Гражданское право - определение, структура, принципы, методы. Правоотношение - определение, виды, структура Экстерьер, интерьер и типы конституции с/х животных
Экстерьер, интерьер и типы конституции с/х животных Учебный проект Магические квадраты
Учебный проект Магические квадраты Презентация по духовно-нравственному воспитанию
Презентация по духовно-нравственному воспитанию Застосування активних фільтрів для підвищення ефективності трифазної електричної системи
Застосування активних фільтрів для підвищення ефективності трифазної електричної системи Особенности хозяйственной жизни древневосточных и античных обществ (часть 1)
Особенности хозяйственной жизни древневосточных и античных обществ (часть 1) Буддизм – самая древняя мировая религия
Буддизм – самая древняя мировая религия Философия Древней Индии: особенности, школы и представители
Философия Древней Индии: особенности, школы и представители Книга рекордов 1 Б
Книга рекордов 1 Б Автоматизация процессов дробления
Автоматизация процессов дробления портфолио воспитателя
портфолио воспитателя Перенаселение как глобальная экологическая проблема
Перенаселение как глобальная экологическая проблема Пограничное расстройство личности
Пограничное расстройство личности Цветок-булавочница
Цветок-булавочница Дидактическая игра Угадай звук.
Дидактическая игра Угадай звук. Преимущества и недостатки систем охлаждения ПК
Преимущества и недостатки систем охлаждения ПК Признаки текста. Анализ текста
Признаки текста. Анализ текста Анатомия и физиология речевого аппарата. Патология речи
Анатомия и физиология речевого аппарата. Патология речи Санитарная обработка технологического оборудования
Санитарная обработка технологического оборудования Финансы в экономике
Финансы в экономике Ожоги. Классификация ожогов
Ожоги. Классификация ожогов Клятвы на новый год
Клятвы на новый год Презентация Медведев (2)
Презентация Медведев (2) Отражение. Изображение в плоском зеркале
Отражение. Изображение в плоском зеркале Создатель игры волейбол
Создатель игры волейбол Падежные окончания имён существительных
Падежные окончания имён существительных Задержка психического развития
Задержка психического развития Методические материалы по социальному проектированию для классных руководителей
Методические материалы по социальному проектированию для классных руководителей