- Автоматизация процессов дробления

Содержание
- 2. 12 Автоматизация процессов дробления Вид конусной дробилки в разрезе
- 3. 12 Автоматизация процессов дробления Конусная дробилка крупного дробления ККД-900
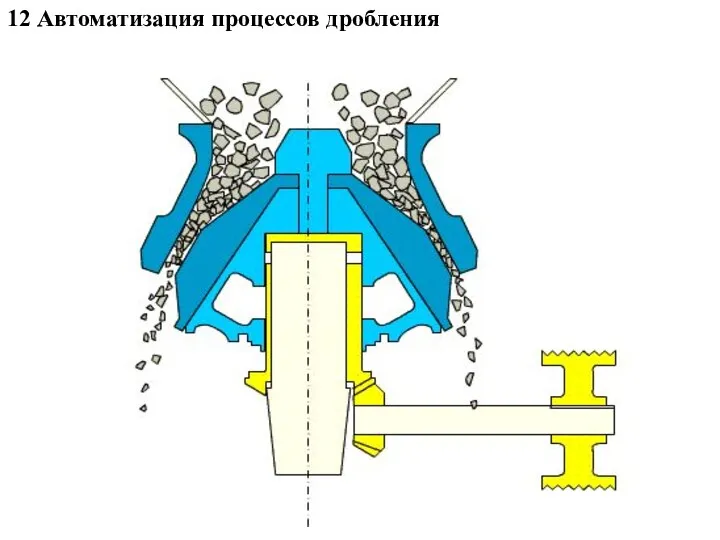
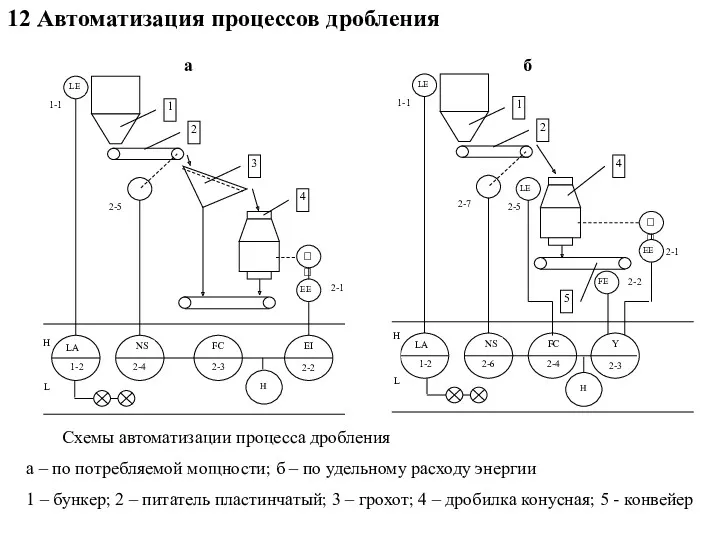
- 4. 12 Автоматизация процессов дробления
- 5. 12 Автоматизация процессов дробления Автоматика дробильных установок должна обеспечивать: а) контроль уровня горной массы в приемном
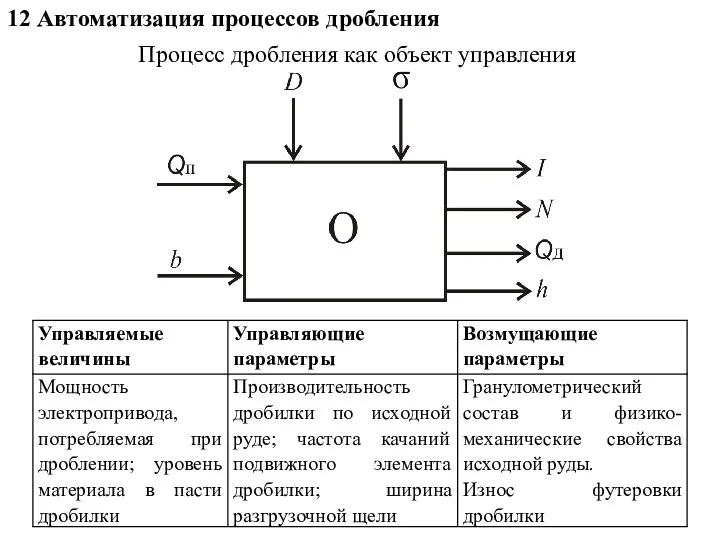
- 6. 12 Автоматизация процессов дробления Процесс дробления как объект управления
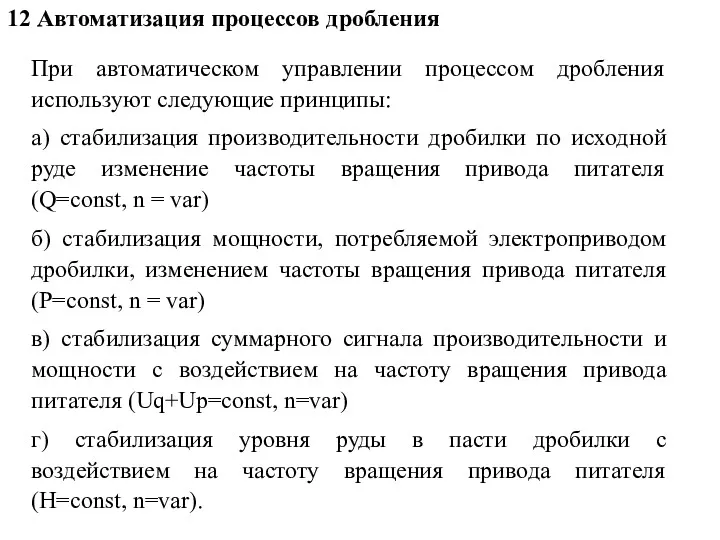
- 7. 12 Автоматизация процессов дробления При автоматическом управлении процессом дробления используют следующие принципы: а) стабилизация производительности дробилки
- 8. 12 Автоматизация процессов дробления
- 9. 12 Автоматизация процессов дробления Радарный уровнемер УЛМ-31А1
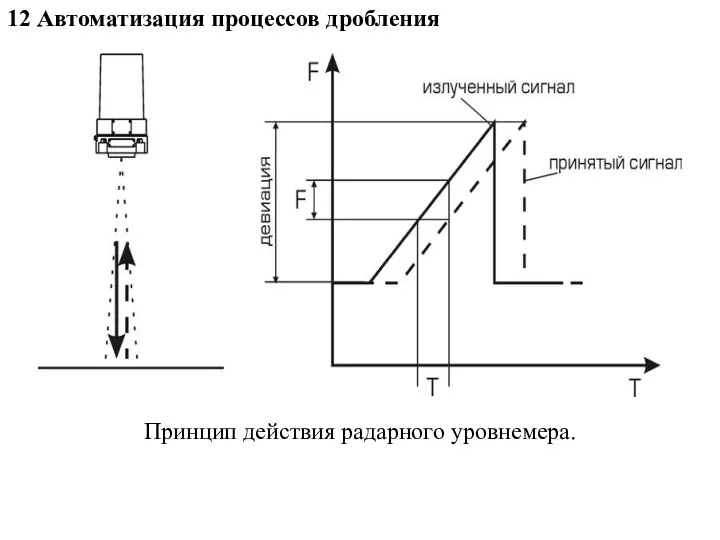
- 10. 12 Автоматизация процессов дробления Принцип действия радарного уровнемера.
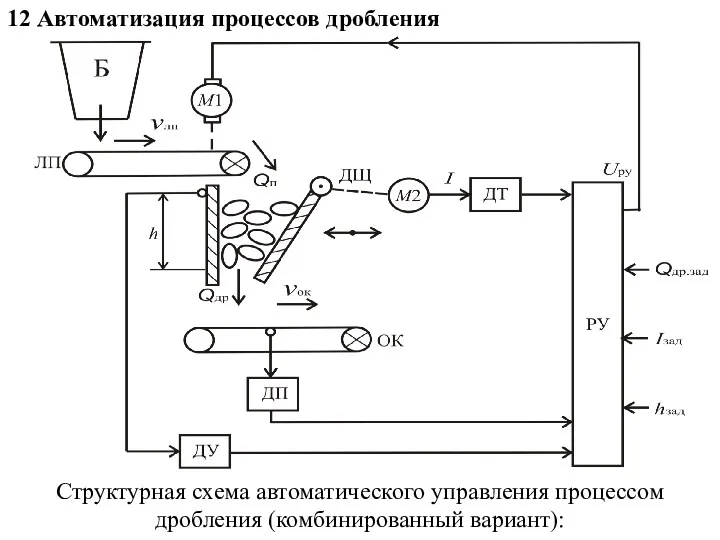
- 11. 12 Автоматизация процессов дробления Структурная схема автоматического управления процессом дробления (комбинированный вариант):
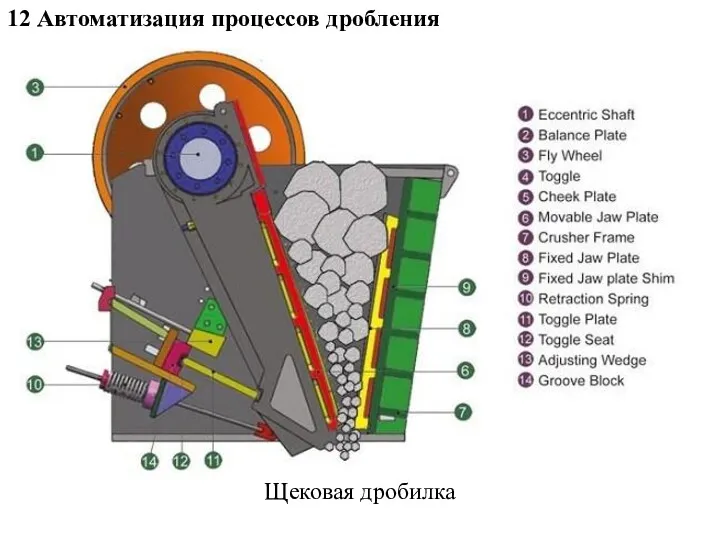
- 12. 12 Автоматизация процессов дробления Щековая дробилка
- 13. 12 Автоматизация процессов дробления Принцип работы щековой дробилки
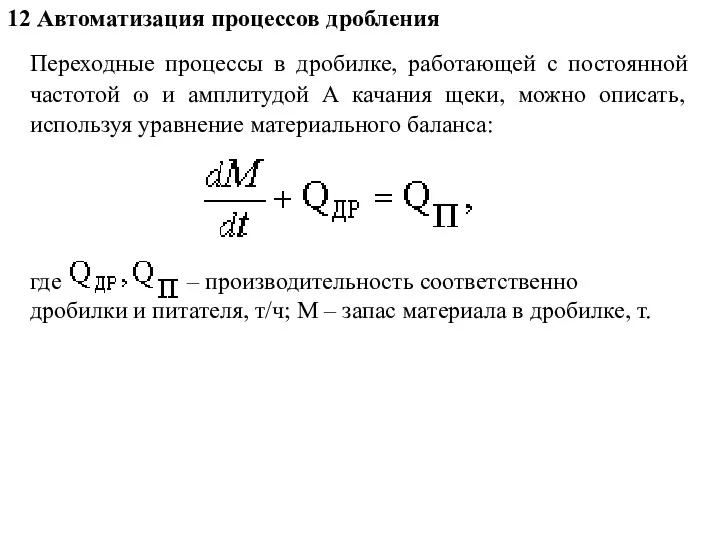
- 14. 12 Автоматизация процессов дробления Переходные процессы в дробилке, работающей с постоянной частотой ω и амплитудой А
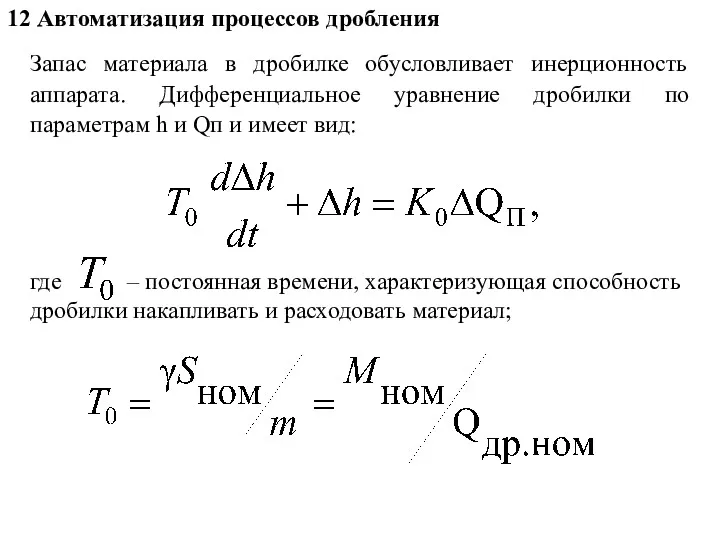
- 15. 12 Автоматизация процессов дробления Запас материала в дробилке обусловливает инерционность аппарата. Дифференциальное уравнение дробилки по параметрам
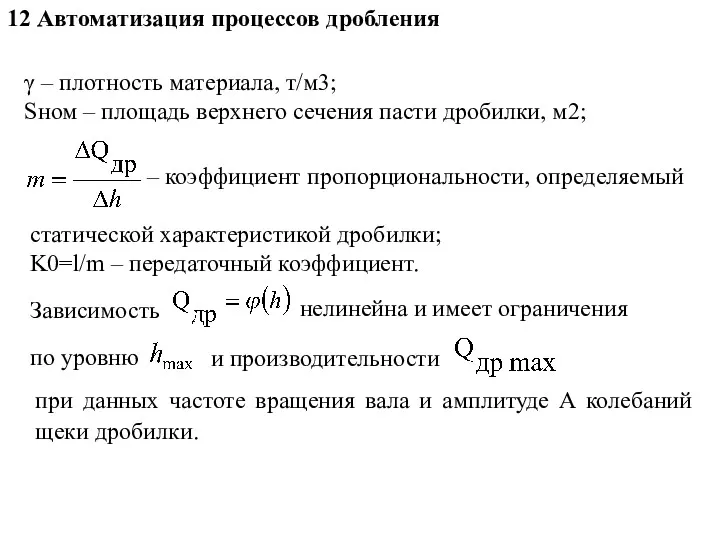
- 16. 12 Автоматизация процессов дробления γ – плотность материала, т/м3; Sном – площадь верхнего сечения пасти дробилки,
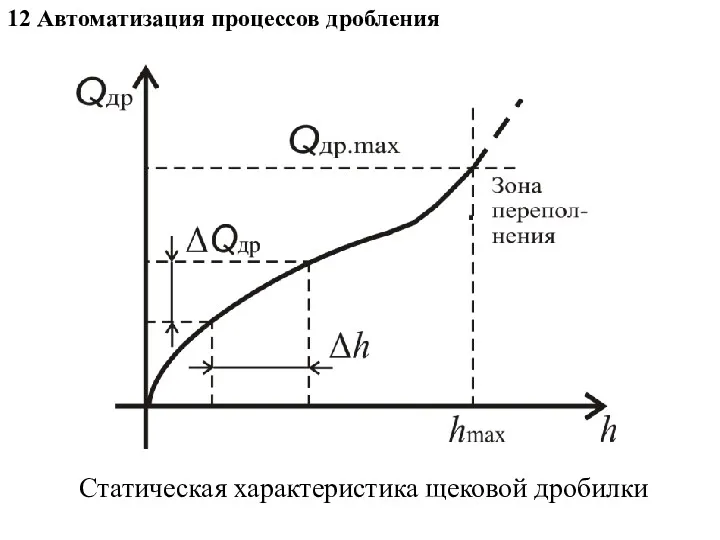
- 17. 12 Автоматизация процессов дробления Статическая характеристика щековой дробилки
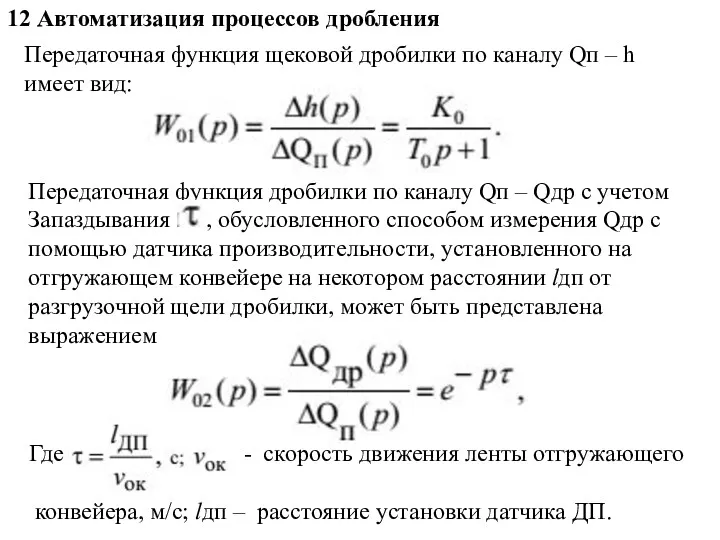
- 18. 12 Автоматизация процессов дробления Передаточная функция щековой дробилки по каналу Qп – h имеет вид: Передаточная
- 20. Скачать презентацию
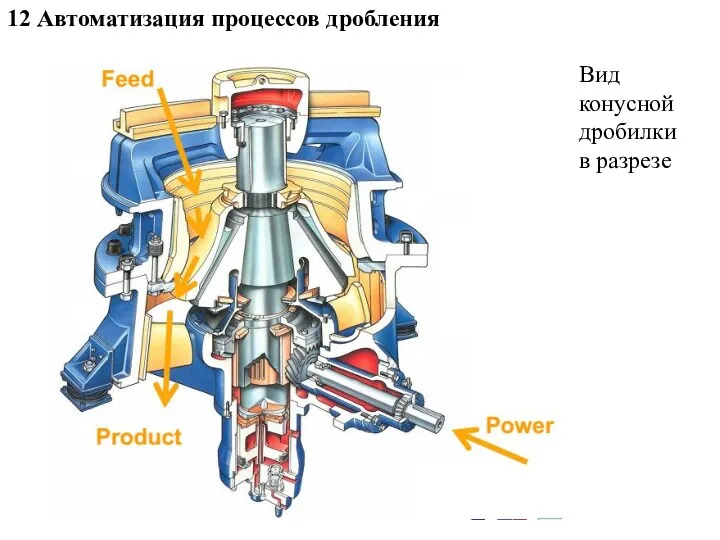
12 Автоматизация процессов дробления
Вид конусной дробилки в разрезе
12 Автоматизация процессов дробления
Вид конусной дробилки в разрезе
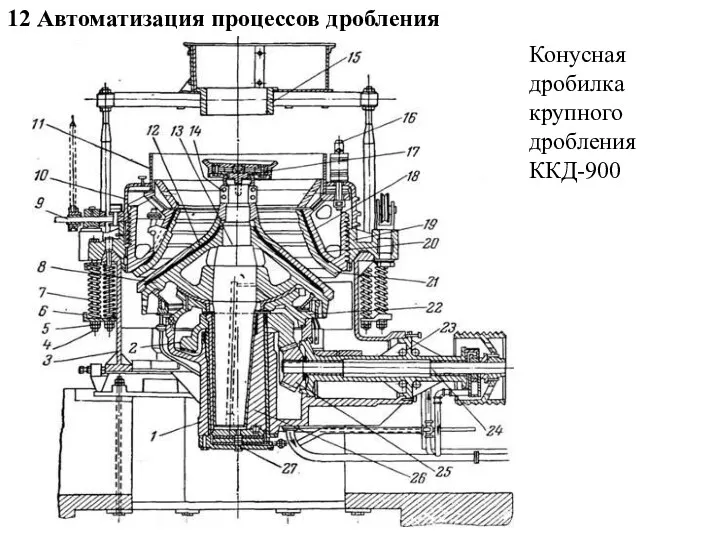
12 Автоматизация процессов дробления
Конусная дробилка крупного дробления
ККД-900
12 Автоматизация процессов дробления
Конусная дробилка крупного дробления
ККД-900
12 Автоматизация процессов дробления
12 Автоматизация процессов дробления
12 Автоматизация процессов дробления
Автоматика дробильных установок должна обеспечивать:
а) контроль уровня
12 Автоматизация процессов дробления
Автоматика дробильных установок должна обеспечивать:
а) контроль уровня
12 Автоматизация процессов дробления
Процесс дробления как объект управления
12 Автоматизация процессов дробления
Процесс дробления как объект управления
12 Автоматизация процессов дробления
При автоматическом управлении процессом дробления используют следующие принципы:
а)
12 Автоматизация процессов дробления
При автоматическом управлении процессом дробления используют следующие принципы:
а)
12 Автоматизация процессов дробления
12 Автоматизация процессов дробления

12 Автоматизация процессов дробления
Радарный уровнемер УЛМ-31А1
12 Автоматизация процессов дробления
Радарный уровнемер УЛМ-31А1
12 Автоматизация процессов дробления
Принцип действия радарного уровнемера.
12 Автоматизация процессов дробления
Принцип действия радарного уровнемера.
12 Автоматизация процессов дробления
Структурная схема автоматического управления процессом дробления (комбинированный вариант):
12 Автоматизация процессов дробления
Структурная схема автоматического управления процессом дробления (комбинированный вариант):
12 Автоматизация процессов дробления
Щековая дробилка
12 Автоматизация процессов дробления
Щековая дробилка

12 Автоматизация процессов дробления
Принцип работы щековой дробилки
12 Автоматизация процессов дробления
Принцип работы щековой дробилки
12 Автоматизация процессов дробления
Переходные процессы в дробилке, работающей с постоянной частотой
12 Автоматизация процессов дробления
Переходные процессы в дробилке, работающей с постоянной частотой
12 Автоматизация процессов дробления
Запас материала в дробилке обусловливает инерционность аппарата. Дифференциальное
12 Автоматизация процессов дробления
Запас материала в дробилке обусловливает инерционность аппарата. Дифференциальное
12 Автоматизация процессов дробления
γ – плотность материала, т/м3;
Sном – площадь
12 Автоматизация процессов дробления
γ – плотность материала, т/м3;
Sном – площадь
12 Автоматизация процессов дробления
Статическая характеристика щековой дробилки
12 Автоматизация процессов дробления
Статическая характеристика щековой дробилки
12 Автоматизация процессов дробления
Передаточная функция щековой дробилки по каналу Qп –
12 Автоматизация процессов дробления
Передаточная функция щековой дробилки по каналу Qп –
 Проект Берёза - символ России
Проект Берёза - символ России Треугольничек заветный Создание подарочного письма ветеранам Великой Отечественной войны (4)
Треугольничек заветный Создание подарочного письма ветеранам Великой Отечественной войны (4) Изобретения, предсказанные в научной фантастике
Изобретения, предсказанные в научной фантастике Участие краевом конкурсе Учитель года Алтая - 2012
Участие краевом конкурсе Учитель года Алтая - 2012 Твой компьютер
Твой компьютер Такие разные матрешки
Такие разные матрешки Рефрижераторный контейнер марки Carrier
Рефрижераторный контейнер марки Carrier Создание коммерческого предложения
Создание коммерческого предложения What type of habitat is this?
What type of habitat is this? презентация Детское творческое объединение как среда социализации детей
презентация Детское творческое объединение как среда социализации детей Система органов опоры и движения
Система органов опоры и движения Автоматизация звука Л словах и словосочетаниях
Автоматизация звука Л словах и словосочетаниях По дорогам Афгана
По дорогам Афгана Инструкция для граждан по дистанционному взаимодействию (на признание безработными)
Инструкция для граждан по дистанционному взаимодействию (на признание безработными) Софизмы
Софизмы Договорные отношения предпринимателей с хозяйственными партнерами
Договорные отношения предпринимателей с хозяйственными партнерами Фенологическое наблюдение за деревом. 5 класс
Фенологическое наблюдение за деревом. 5 класс Инновационный проект развития научно-опытного предприятия на базе ННГУ
Инновационный проект развития научно-опытного предприятия на базе ННГУ Залізничний транспорт
Залізничний транспорт Аппаратура измерения температуры газов двигателей (урок 15)
Аппаратура измерения температуры газов двигателей (урок 15)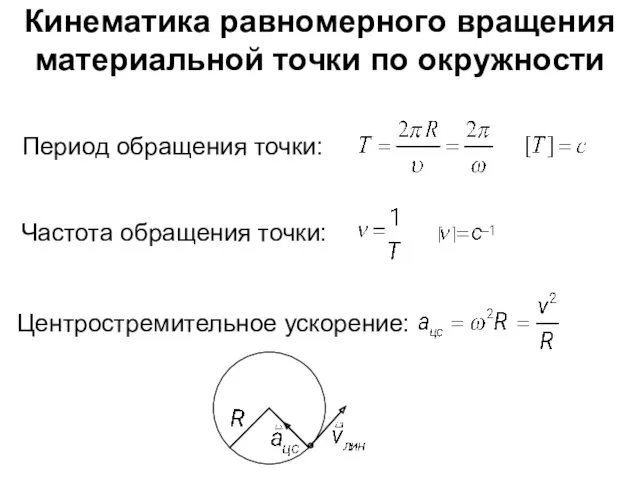 Кинематика равномерного вращения материальной точки по окружности. (Лекция 2)
Кинематика равномерного вращения материальной точки по окружности. (Лекция 2) ЛОГОПЕДИЧЕСКАЯ РАБОТА ПРИ ДИЗАРТРИИ
ЛОГОПЕДИЧЕСКАЯ РАБОТА ПРИ ДИЗАРТРИИ Способы обеспечения точности сборки
Способы обеспечения точности сборки Презентация к классному часу Хорошую речь хорошо и слушать
Презентация к классному часу Хорошую речь хорошо и слушать Требования к пятому поколению авиационных двигателей
Требования к пятому поколению авиационных двигателей Структура административно-правовой нормы
Структура административно-правовой нормы Области применения компьютерной графики
Области применения компьютерной графики Своя игра. 6 класс
Своя игра. 6 класс