- Система динамического позиционирования ледокола проекта 22600

Содержание
- 2. Объект исследования Объектом исследования в данном проекте является система динамического позиционирования, входящая в состав системы управления
- 3. Области применения СДП Морское бурение при добыче полезных ископаемых Укладка глубоководных кабелей и трубопроводов Обеспечение водолазных
- 4. Линейный дизельный ледокол проекта 22600 «Виктор Черномырдин»
- 5. Класс судна КМ Icebreaker8 [2] АUT1-IСS OMBO DYNPOS-2 FF2WS EPP HELIDECK-H ANTI-ICE WINTERIZATION (-40) ECO-S Special
- 6. Функциональный состав системы Основные функции и подсистемы: Система стабилизации курса Система стабилизации путевого угла Стабилизация боковых
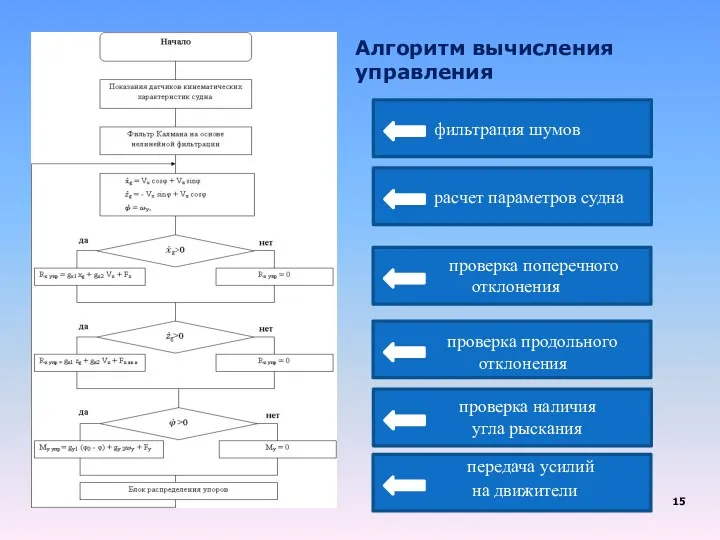
- 7. УО – управляемый объект Д – датчики кинематических параметров судна ИО – исполнительные органы ПУД –
- 8. Система стабилизации курса
- 9. Стабилизация путевого угла Неконтролируемый снос судна Ориентация вектора скорости Компенсация дрейфа судна Парирование дрейфа судна
- 10. Стабилизация боковых отклонений Изменение курса судна при компенсации бокового отклонения Боковое отклонение судна Zg=V0(β-φ) - мгновенная
- 11. Динамическое позиционирование возмущения: Fxвв.в, Fz вв.в, Fy вв.в φ0 - задаваемая ориентация
- 12. Классификация Для оборудования СДП потеря позиции судном может наступить вследствие неисправности: Одного из компонентов для 1го
- 13. Типовая конфигурация движителей
- 14. Структура системы позиционирования
- 16. Заключение Рассмотрены функции и структура систем динамического позиционирования. Принципы построения систем описаны на примере системы динамического
- 18. Скачать презентацию
Объект исследования
Объектом исследования в данном проекте является система динамического позиционирования, входящая
Объект исследования
Объектом исследования в данном проекте является система динамического позиционирования, входящая

Области применения СДП
Морское бурение при добыче полезных ископаемых
Укладка глубоководных кабелей и
Области применения СДП
Морское бурение при добыче полезных ископаемых
Укладка глубоководных кабелей и

Линейный дизельный ледокол проекта 22600 «Виктор Черномырдин»
Линейный дизельный ледокол проекта 22600 «Виктор Черномырдин»
![Класс судна КМ Icebreaker8 [2] АUT1-IСS OMBO DYNPOS-2 FF2WS EPP](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/393673/slide-4.jpg)
Класс судна
КМ Icebreaker8 [2] АUT1-IСS OMBO DYNPOS-2 FF2WS EPP HELIDECK-H ANTI-ICE
КМ Icebreaker8 [2] АUT1-IСS OMBO DYNPOS-2 FF2WS EPP HELIDECK-H ANTI-ICE

Функциональный состав системы
Основные функции и подсистемы:
Система стабилизации курса
Система стабилизации путевого угла
Стабилизация
Функциональный состав системы
Основные функции и подсистемы:
Система стабилизации курса
Система стабилизации путевого угла
Стабилизация
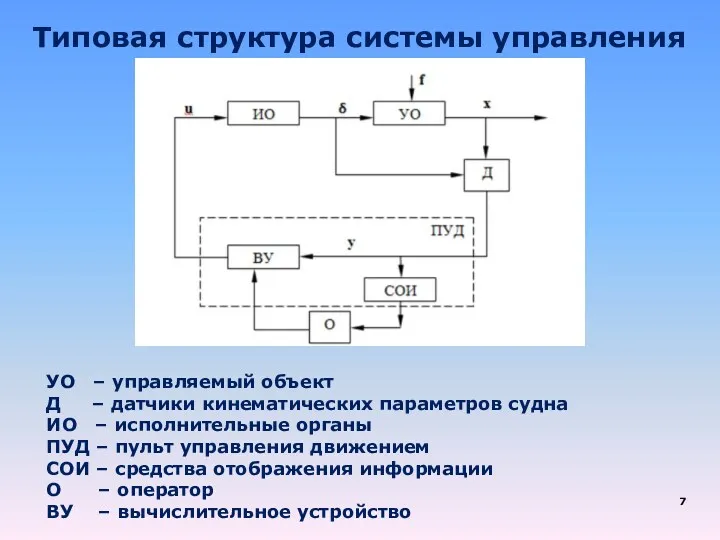
УО – управляемый объект
Д – датчики кинематических параметров судна
ИО –
УО – управляемый объект Д – датчики кинематических параметров судна ИО –

Система стабилизации курса
Система стабилизации курса
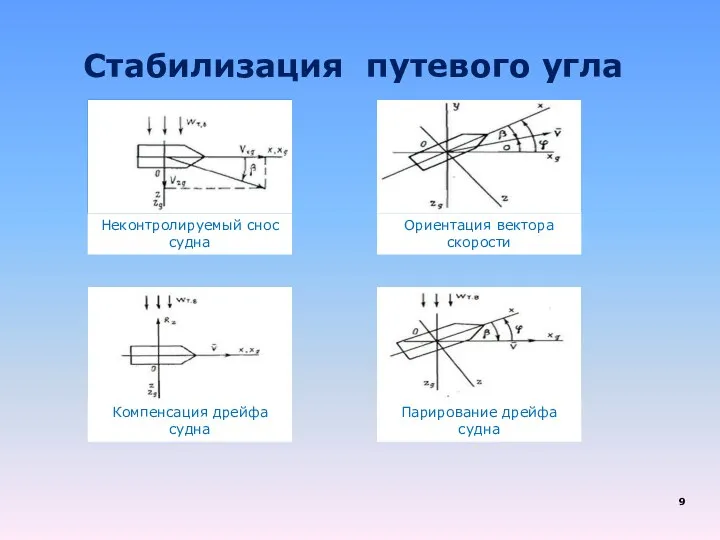
Стабилизация путевого угла
Неконтролируемый снос судна
Ориентация вектора скорости
Компенсация дрейфа судна
Парирование дрейфа
судна
Стабилизация путевого угла
Неконтролируемый снос судна
Ориентация вектора скорости
Компенсация дрейфа судна
Парирование дрейфа
судна
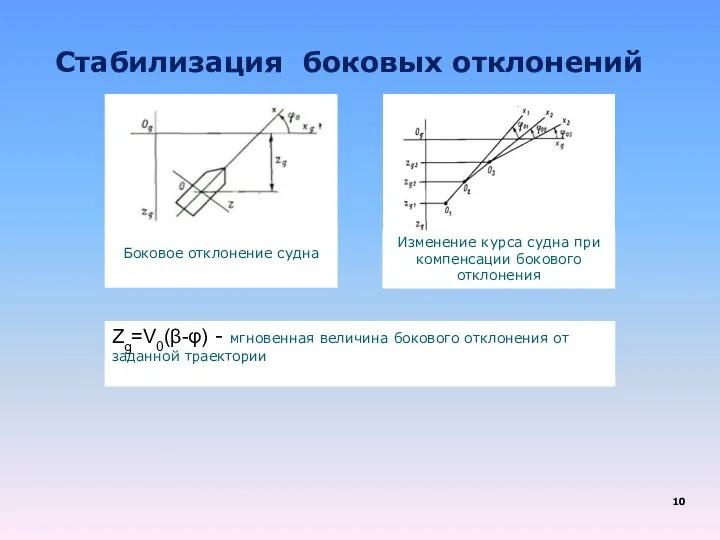
Стабилизация боковых отклонений
Изменение курса судна при компенсации бокового отклонения
Боковое отклонение судна
Zg=V0(β-φ)
Стабилизация боковых отклонений
Изменение курса судна при компенсации бокового отклонения
Боковое отклонение судна
Zg=V0(β-φ)
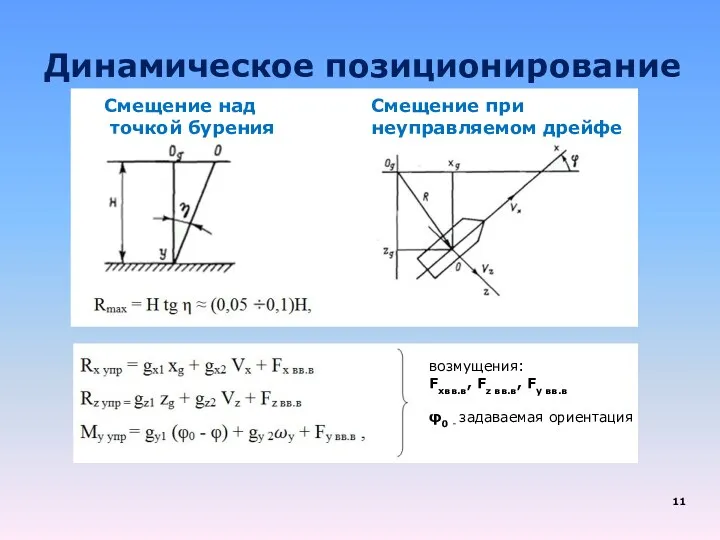
Динамическое позиционирование
возмущения:
Fxвв.в, Fz вв.в, Fy вв.в
φ0 - задаваемая ориентация
Динамическое позиционирование
возмущения:
Fxвв.в, Fz вв.в, Fy вв.в
φ0 - задаваемая ориентация
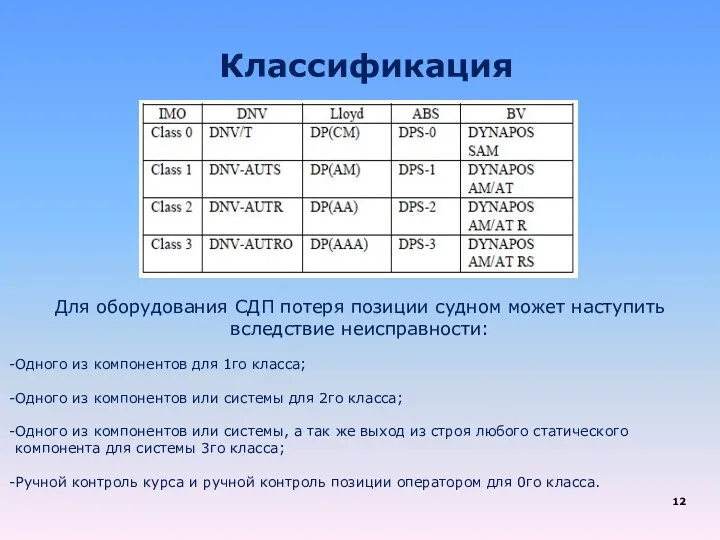
Классификация
Для оборудования СДП потеря позиции судном может наступить вследствие неисправности:
Одного
Классификация
Для оборудования СДП потеря позиции судном может наступить вследствие неисправности:
Одного

Типовая конфигурация движителей
Типовая конфигурация движителей

Структура системы позиционирования
Структура системы позиционирования
Заключение
Рассмотрены функции и структура систем динамического позиционирования.
Принципы построения систем описаны на
Заключение
Рассмотрены функции и структура систем динамического позиционирования.
Принципы построения систем описаны на
 Формирование традиций классного коллектива
Формирование традиций классного коллектива Авторитарный режим и суперпрезидентская республика. Режим военной диктатуры, авторитарный национализм
Авторитарный режим и суперпрезидентская республика. Режим военной диктатуры, авторитарный национализм Политическое развитие в 60-80-х гг
Политическое развитие в 60-80-х гг Кирпич, терракота
Кирпич, терракота Презентация к стихотворению Маргариты Агашиной Перекресток
Презентация к стихотворению Маргариты Агашиной Перекресток Методология научного познания
Методология научного познания Установите счётчики. Принцип работы счётчика
Установите счётчики. Принцип работы счётчика Статистические методы определения показателей надежности аппаратного обеспечения автоматизированных систем
Статистические методы определения показателей надежности аппаратного обеспечения автоматизированных систем Презентация для учителей-логопедов Организационная сторона деятельности логопункта и ПМПк в ДОУ
Презентация для учителей-логопедов Организационная сторона деятельности логопункта и ПМПк в ДОУ Презинтация Ласковый сентябрь
Презинтация Ласковый сентябрь Курить-здоровью вредить
Курить-здоровью вредить Материаловедение. Производство чугуна и стали. Строение стального слитка. (Тема 4)
Материаловедение. Производство чугуна и стали. Строение стального слитка. (Тема 4) Подготовка к квалификационному экзамену в области оценочной деятельности по направлению Оценка недвижимости
Подготовка к квалификационному экзамену в области оценочной деятельности по направлению Оценка недвижимости Острая печёночная недостаточность
Острая печёночная недостаточность кинодискуссия - как
кинодискуссия - как Скорость химических реакций
Скорость химических реакций Лев Николаевич Толстой
Лев Николаевич Толстой Орта Азия халықтарының тарихындағы Әмір Темірдің рөлі
Орта Азия халықтарының тарихындағы Әмір Темірдің рөлі Верховино 1917-1920
Верховино 1917-1920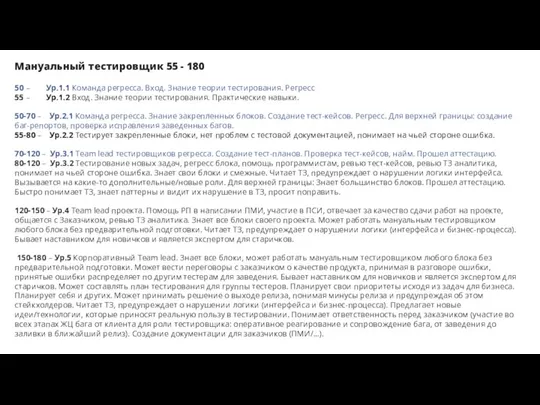 Грейды по уровням ответственности мануальных тестировщиков
Грейды по уровням ответственности мануальных тестировщиков Программно-методическое обеспечение по музыкальному воспитанию детей
Программно-методическое обеспечение по музыкальному воспитанию детей Культивирование жемчуга
Культивирование жемчуга Алексей Михайлович Романов (1629-1676)
Алексей Михайлович Романов (1629-1676) Обладнання для обертання породоруйнівного інструменту
Обладнання для обертання породоруйнівного інструменту Показательная функция
Показательная функция Проблемное обучение на уроках химии
Проблемное обучение на уроках химии Инструкция по технике безопасности обучающихся
Инструкция по технике безопасности обучающихся Комфортная городская среда
Комфортная городская среда