- Система каротажа при бурении. Занятие 9

Содержание
- 2. Точность проведения инклинометрии при бурении Точность проведения инклинометрии при бурении с помощью магнитных инструментов зависит от:
- 3. Суммарная погрешность Равна сумме погрешности метода измерений и систематической погрешности Погрешность метода измерений Связанные с измерительным
- 4. Определение азимута с помощью длинной УБТ При измерении в условиях отсутствия магнитных воздействий Будет всегда получаться
- 5. Определение азимута с помощью короткой УБТ Выполняется корректировка систематических погрешностей, вызванных наличием магнитных воздействий вдоль оси
- 6. Принцип действия Определение терминов
- 7. Акселерометр / Сила тяжести Магнитометр / Поле Земли Угол установки отклонителя Ось зонда Зенитный угол –
- 8. Угол установки отклонителя для верхней стороны Угол между разметочной линией отклонителя (забойного двигателя) и верхом верхней
- 9. Магнитный угол установки отклонителя Угол направления разметочной линии отклонителя (забойного двигателя) по отношению к истинному или
- 10. Зенитный угол Угол между вертикалью и стволом скважины в вертикальной плоскости Вычисляется посредством измерений направления действия
- 11. Азимут Направление ствола скважины по отношению к магнитному, истинному или сеточному северу в горизонтальном плоскости Вычисляется
- 12. Определение азимута с помощью длинной УБТ Входные значения для датчика и обработки на поверхности, требуемые для
- 13. Определение азимута с помощью короткой УБТ Основывается на запатентованной технологии Используются следующие входные значения: Измеренные амплитуды
- 14. Определение азимута с помощью короткой УБТ Входные значения для датчика и обработки на поверхности, требуемые для
- 15. Магнитное склонение Разница в градусах между магнитным и истинным севером для определенной точки Земли (Magnetic Declination)
- 16. США / Великобритания. Карта магнитного поля Земли. Эпоха 2000 г. Магнитное склонение – Основное поле (D)
- 17. Напряженность магнитного поля (Mag. Field Strength) Полная амплитуда магнитного поля Земли в нанотеслах для определенного места
- 18. США / Великобритания. Карта магнитного поля Земли. Эпоха 2000 г. Суммарная интенсивность – Основное поле (F)
- 19. Угол магнитного наклонения (Dip Angle) Угол между горизонталью и силовыми линиями магнитного поля Земли Угол возрастает
- 20. Угол магнитного наклонения Угол магнитного наклонения Угол магнитного наклонения Угол магнитного наклонения Угол магнитного наклонения Касательная
- 21. Gtotal Значение равно: Gtotal = (Gx2 + Gy2 + Gz2)1/2 Для кварцевых акселерометров должно находиться в
- 22. Btotal measured Значение равно: Btotal msrd = (Bx2 + By2 + Bz msrd2)1/2 Должно регулярно изменяться
- 23. Btotal measured Изменения параметра Bt msrd во время работы долота могут вызываться: Потерянным в скважине оборудованием
- 24. Btotal calculated Значение равно: Btotal calc = (Bx2 + By2 + Bz calc2)1/2 где Bz calc
- 25. Btotal calculated При отсутствии поперечно-осевых воздействий значение Bt calc должно быть равно Btotal Если поперечно-осевые воздействия
- 26. Как насчет погрешностей зонда? Оси датчиков инклинометрического зонда выровнены не идеально Сделано людьми Чувствительность электроники акселерометров
- 27. Коэффициенты калибровки для необработанных данных Коэффициенты применяются для необработанных данных акселерометров и магнитометров каждой оси Углы
- 28. Коэффициенты калибровки для необработанных данных Коэффициент масштабирования (scale) Используется для преобразования выходного напряжения каждого датчика в
- 29. Неточное выравнивание инструмента относительно оси ствола скважины Другим источником погрешностей инклинометрии является неточное выравнивание инклинометрического зонда
- 30. Кратковременные изменения магнитного поля Земли Очень важным источником остаточных погрешностей при магнитной инклинометрии является неопределенность параметров
- 31. Кратковременные изменения магнитного поля Земли Приливные силы и силы в земной коре также ежесуточно влияют на
- 32. Принцип действия Обеспечение качества
- 33. Концепция Ортогонально установленные трехосные феррозондовые магнитометры калибруются на определение напряженности магнитного поля Земли, измеренной с помощью
- 34. Концепция Любые нарушения выравнивания датчиков осей X, Y и Z оцениваются количественно и компенсируются с помощью
- 35. Теория и практика использования зонда PCD Выполнение инклинометрии с помощью зонда PCD при включении насосов Производится
- 36. Теория и практика использования зонда PCD Выполнение инклинометрии с помощью зонда PCD при отключении насосов Опрос
- 37. Теория и практика использования зонда PCD Выполнение инклинометрии с помощью зонда PCD при выключенных насосах В
- 38. Теория и практика использования зонда PCD Получение данных для угла установки отклонителя выполняется так же, как
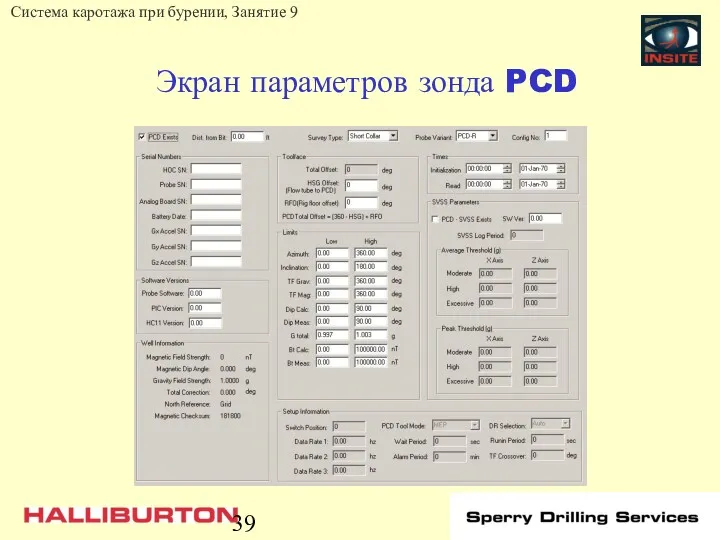
- 39. Экран параметров зонда PCD
- 40. Активная скважина – Информация об инклинометрии
- 41. Активная скважина – Местонахождение
- 42. Оценка проведения инклинометрии Источники погрешностей при инклинометрии
- 43. Погрешности глубины Глубина неправильно определена Глубина неправильно введена Неправильно введено расстояние между зондом и долотом
- 44. Калибровка датчика Коэффициент масштаба (усиление) Начало координат (смещение) Линейность Температурный коэффициент Неправильное выравнивание (ось)
- 45. Неправильное выравнивание зонда Неконцентричное расположение защитного кожуха Неконцентричное расположение УБТ
- 46. Неправильное выравнивание бурильной колонны Компоновки для направленного бурения Забойный двигатель с кривым переводником Компоновки для вращательного
- 47. Паразитные магнитные поля Соседние обсаженные скважины / оставленные в скважине инструменты Магнитные пласты или системы бурового
- 48. Рабочие характеристики зонда / датчика Опрос датчиков Не может выполняться одновременный опрос всех датчиков Акселерометры Влияет
- 49. Вращение бурильной колонны во время сохранения данных инклинометрии Перемещение по осям X и Y GOXY На
- 50. Вращение бурильной колонны во время сохранения данных инклинометрии Перемещение по осям X и Y Вращение больше
- 51. Продольное перемещение бурильной колонны во время сохранения данных инклинометрии Перемещение вдоль оси Z Gz Gz реагирует
- 52. Вибрация зонда во время сохранения данных инклинометрии Движение по осям X, Y и Z Плоскость XY
- 53. Обзор вычислений для инклинометрии
- 54. Терминология вычислений для инклинометрии Точка измерений Длина траектории Истинная глубина по вертикали Зенитный угол Глубина по
- 55. Терминология вычислений для инклинометрии Отклонение траектории Вертикальное сечение Отклонение Направление отклонения
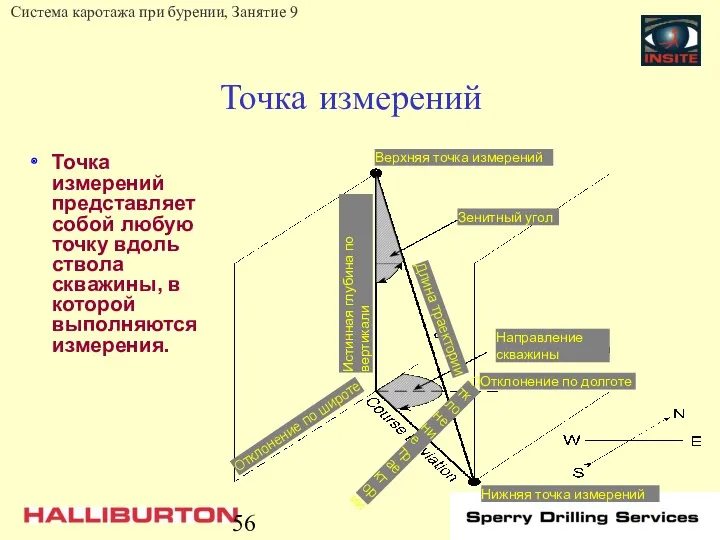
- 56. Точка измерений Точка измерений представляет собой любую точку вдоль ствола скважины, в которой выполняются измерения. Верхняя
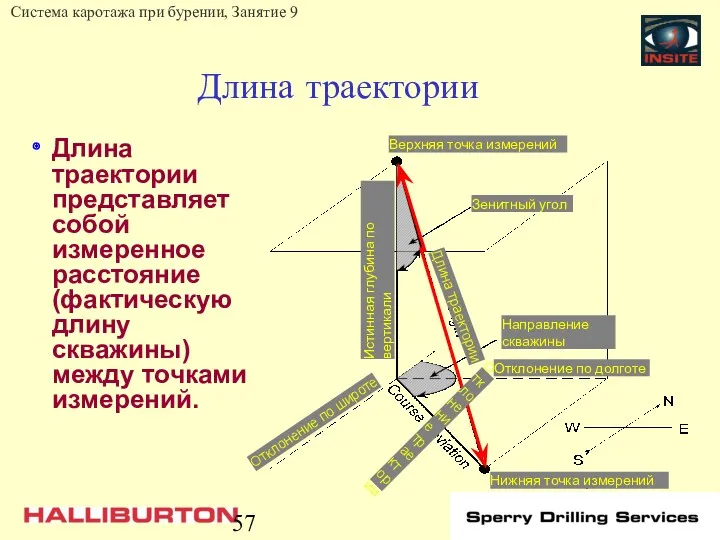
- 57. Длина траектории Длина траектории представляет собой измеренное расстояние (фактическую длину скважины) между точками измерений. Верхняя точка
- 58. Угол отклонения или зенитный угол Угол отклонения или зенитный угол представляет собой угол отклонения ствола скважины
- 59. Отклонение по широте Отклонение по широте представляет собой расстояние смещения скважины по горизонтали от одной точки
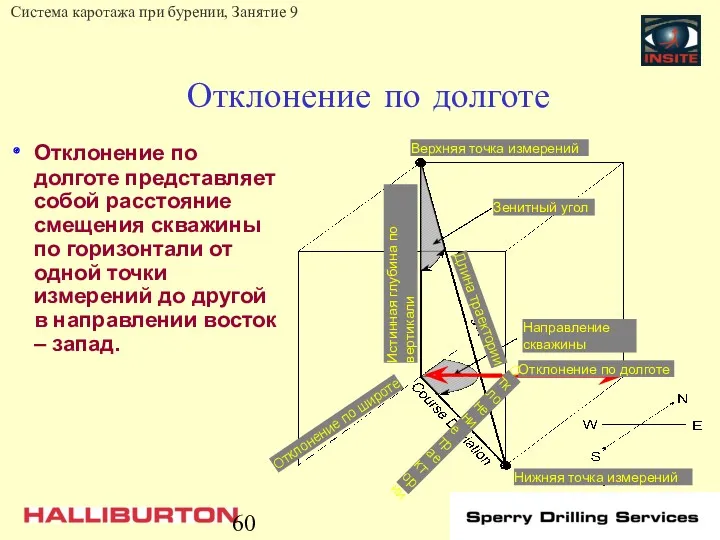
- 60. Отклонение по долготе Отклонение по долготе представляет собой расстояние смещения скважины по горизонтали от одной точки
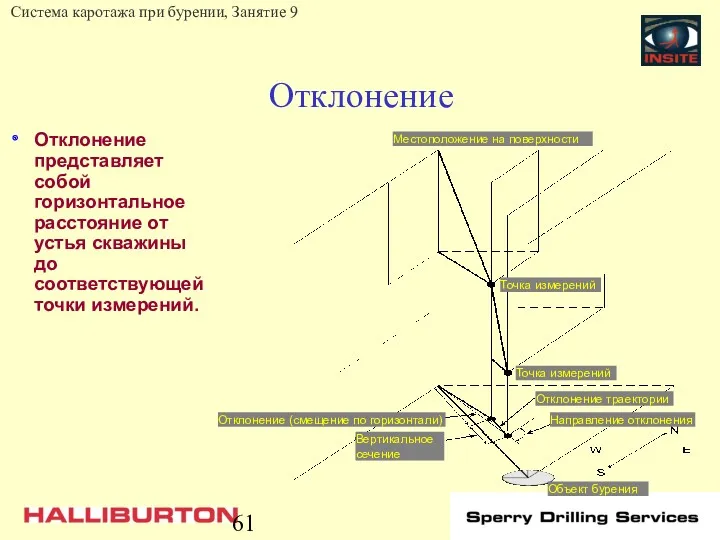
- 61. Отклонение Отклонение представляет собой горизонтальное расстояние от устья скважины до соответствующей точки измерений. Местоположение на поверхности
- 62. Направление отклонения Направление отклонения представляет собой направление горизонтальной линии, образованной соединением точки, расположенной непосредственно под местоположением
- 63. Искривление ствола скважины (DL) и интенсивность искривления ствола скважины (DLS) Искривление ствола скважины представляет собой меру
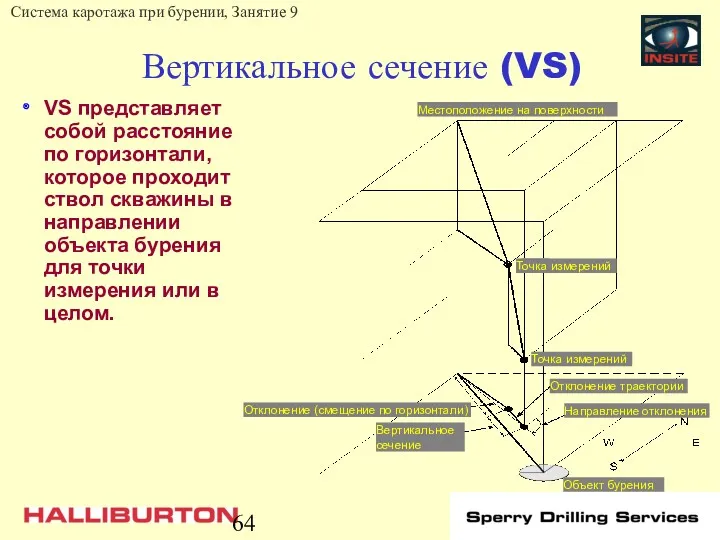
- 64. Вертикальное сечение (VS) VS представляет собой расстояние по горизонтали, которое проходит ствол скважины в направлении объекта
- 65. Методы вычислений для инклинометрии Средний угол Метод касательной Радиус кривизны Минимальная кривизна
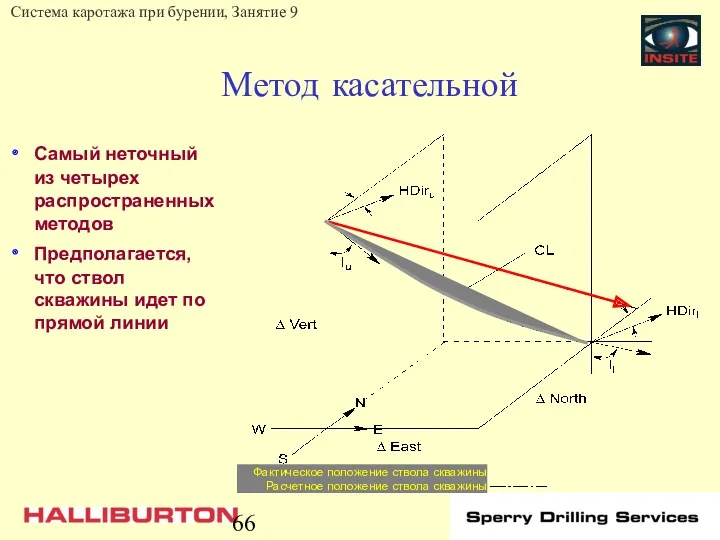
- 66. Метод касательной Самый неточный из четырех распространенных методов Предполагается, что ствол скважины идет по прямой линии
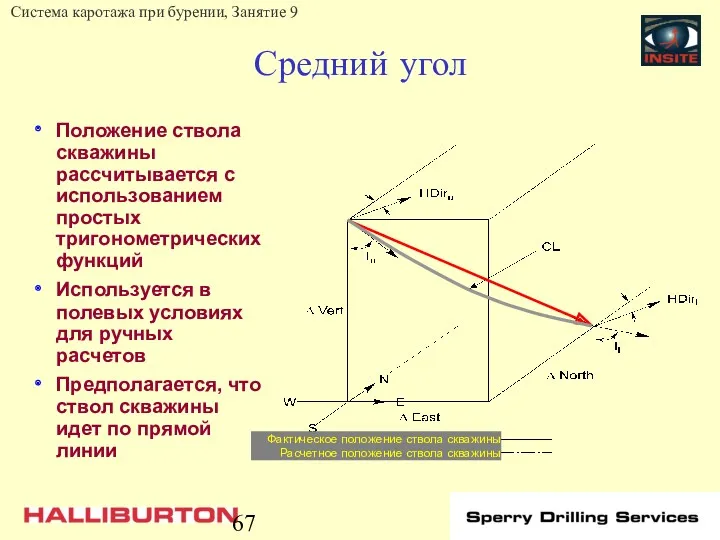
- 67. Средний угол Положение ствола скважины рассчитывается с использованием простых тригонометрических функций Используется в полевых условиях для
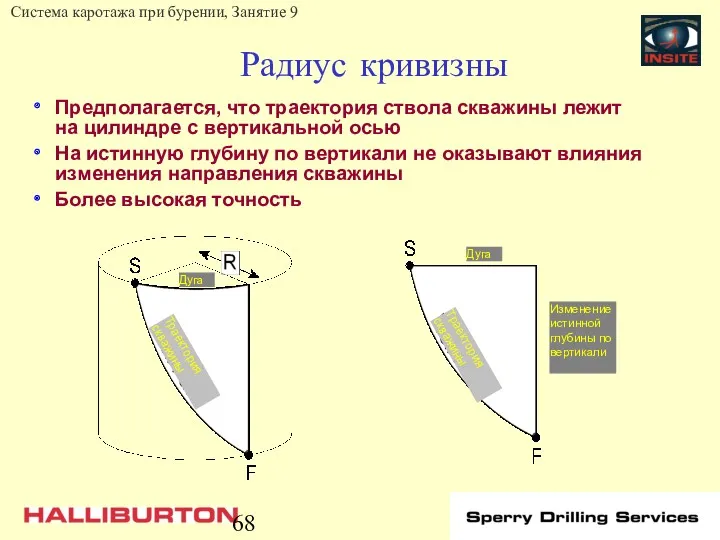
- 68. Радиус кривизны Предполагается, что траектория ствола скважины лежит на цилиндре с вертикальной осью На истинную глубину
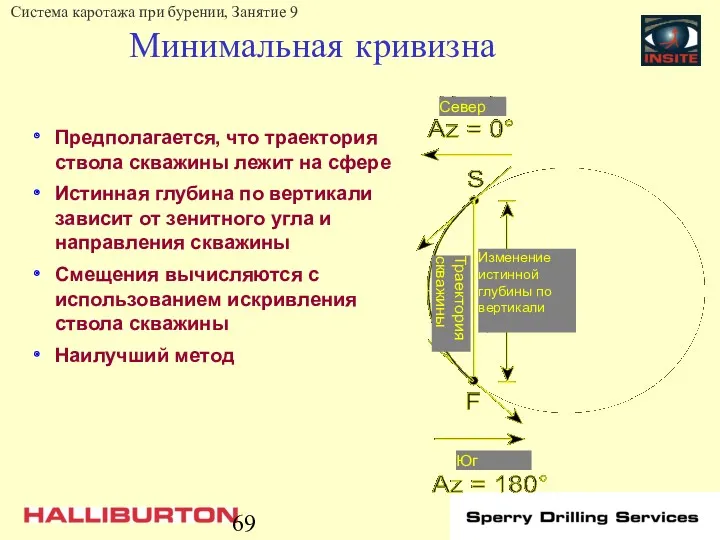
- 69. Минимальная кривизна Предполагается, что траектория ствола скважины лежит на сфере Истинная глубина по вертикали зависит от
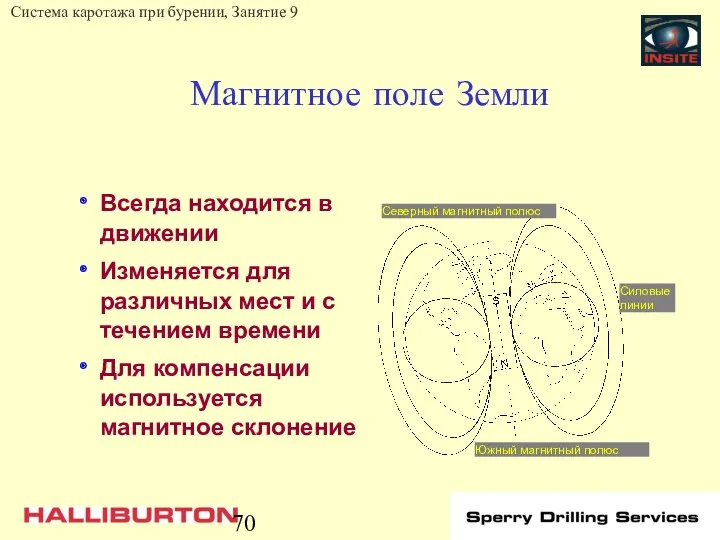
- 70. Магнитное поле Земли Всегда находится в движении Изменяется для различных мест и с течением времени Для
- 72. Скачать презентацию
Точность проведения инклинометрии при бурении
Точность проведения инклинометрии при бурении с помощью
Точность проведения инклинометрии при бурении
Точность проведения инклинометрии при бурении с помощью
Суммарная погрешность
Равна сумме погрешности метода измерений и систематической погрешности
Погрешность метода измерений
Связанные
Суммарная погрешность
Равна сумме погрешности метода измерений и систематической погрешности
Погрешность метода измерений
Связанные
Определение азимута с помощью длинной УБТ
При измерении в условиях отсутствия магнитных
Определение азимута с помощью длинной УБТ
При измерении в условиях отсутствия магнитных
Определение азимута с помощью короткой УБТ
Выполняется корректировка систематических погрешностей, вызванных наличием
Определение азимута с помощью короткой УБТ
Выполняется корректировка систематических погрешностей, вызванных наличием
Принцип действия
Определение терминов
Принцип действия
Определение терминов
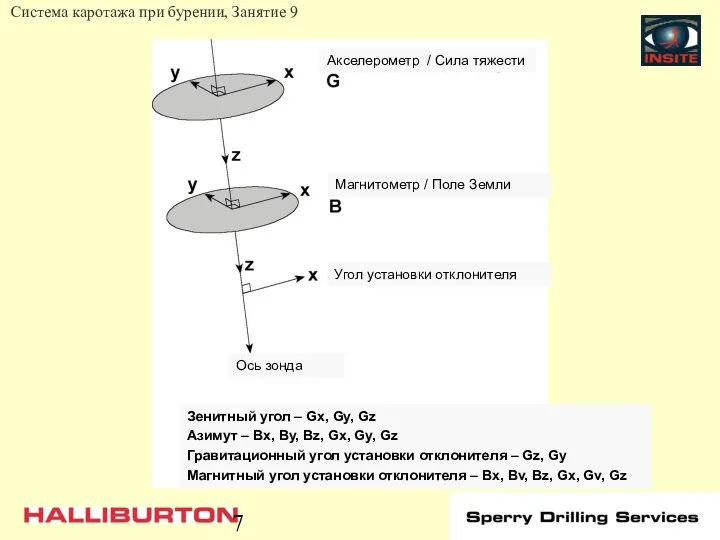
Акселерометр / Сила тяжести
Магнитометр / Поле Земли
Угол установки отклонителя
Ось
Акселерометр / Сила тяжести
Магнитометр / Поле Земли
Угол установки отклонителя
Ось
Угол установки отклонителя для верхней стороны
Угол между разметочной линией отклонителя (забойного
Угол установки отклонителя для верхней стороны
Угол между разметочной линией отклонителя (забойного
Магнитный угол установки отклонителя
Угол направления разметочной линии отклонителя (забойного двигателя) по
Магнитный угол установки отклонителя
Угол направления разметочной линии отклонителя (забойного двигателя) по
Зенитный угол
Угол между вертикалью и стволом скважины в вертикальной плоскости
Вычисляется посредством
Зенитный угол
Угол между вертикалью и стволом скважины в вертикальной плоскости
Вычисляется посредством
Азимут
Направление ствола скважины по отношению к магнитному, истинному или сеточному
Азимут
Направление ствола скважины по отношению к магнитному, истинному или сеточному
Определение азимута с помощью длинной УБТ
Входные значения для датчика и обработки
Определение азимута с помощью длинной УБТ
Входные значения для датчика и обработки
Определение азимута с помощью короткой УБТ
Основывается на запатентованной технологии
Используются следующие входные
Определение азимута с помощью короткой УБТ
Основывается на запатентованной технологии
Используются следующие входные
Определение азимута с помощью короткой УБТ
Входные значения для датчика и обработки
Определение азимута с помощью короткой УБТ
Входные значения для датчика и обработки
Магнитное склонение
Разница в градусах между магнитным и истинным севером для определенной
Магнитное склонение
Разница в градусах между магнитным и истинным севером для определенной
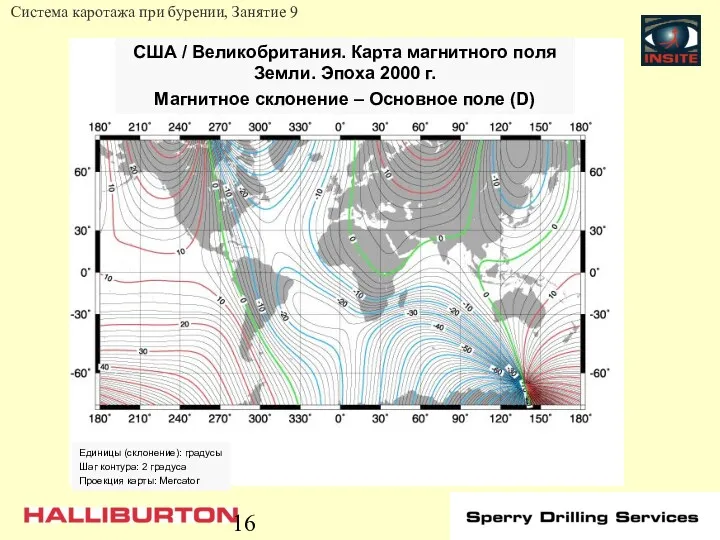
США / Великобритания. Карта магнитного поля Земли. Эпоха 2000 г.
Магнитное склонение
США / Великобритания. Карта магнитного поля Земли. Эпоха 2000 г.
Магнитное склонение
Напряженность магнитного поля (Mag. Field Strength)
Полная амплитуда магнитного поля Земли в
Напряженность магнитного поля (Mag. Field Strength)
Полная амплитуда магнитного поля Земли в
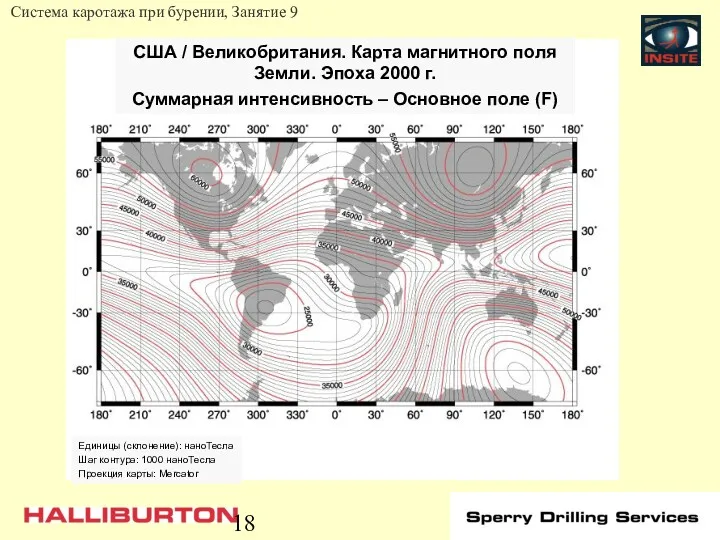
США / Великобритания. Карта магнитного поля Земли. Эпоха 2000 г.
Суммарная интенсивность
США / Великобритания. Карта магнитного поля Земли. Эпоха 2000 г.
Суммарная интенсивность

Угол магнитного наклонения (Dip Angle)
Угол между горизонталью и силовыми линиями магнитного
Угол магнитного наклонения (Dip Angle)
Угол между горизонталью и силовыми линиями магнитного

Угол магнитного наклонения
Угол магнитного наклонения
Угол магнитного наклонения
Угол магнитного наклонения
Угол магнитного наклонения
Касательная
Угол магнитного наклонения
Угол магнитного наклонения
Угол магнитного наклонения
Угол магнитного наклонения
Угол магнитного наклонения
Касательная
Gtotal
Значение равно:
Gtotal = (Gx2 + Gy2 + Gz2)1/2
Для кварцевых акселерометров должно
Gtotal
Значение равно:
Gtotal = (Gx2 + Gy2 + Gz2)1/2
Для кварцевых акселерометров должно
Btotal measured
Значение равно:
Btotal msrd = (Bx2 + By2 + Bz msrd2)1/2
Должно
Btotal measured
Значение равно:
Btotal msrd = (Bx2 + By2 + Bz msrd2)1/2
Должно
Btotal measured
Изменения параметра Bt msrd во время работы долота могут вызываться:
Потерянным
Btotal measured
Изменения параметра Bt msrd во время работы долота могут вызываться:
Потерянным
Btotal calculated
Значение равно:
Btotal calc = (Bx2 + By2 + Bz calc2)1/2
Btotal calculated
Значение равно:
Btotal calc = (Bx2 + By2 + Bz calc2)1/2
Btotal calculated
При отсутствии поперечно-осевых воздействий значение Bt calc должно быть равно
Btotal calculated
При отсутствии поперечно-осевых воздействий значение Bt calc должно быть равно
Как насчет погрешностей зонда?
Оси датчиков инклинометрического зонда выровнены не идеально
Сделано людьми
Чувствительность
Как насчет погрешностей зонда?
Оси датчиков инклинометрического зонда выровнены не идеально
Сделано людьми
Чувствительность
Коэффициенты калибровки для необработанных данных
Коэффициенты применяются для необработанных данных акселерометров и
Коэффициенты калибровки для необработанных данных
Коэффициенты применяются для необработанных данных акселерометров и
Коэффициенты калибровки для необработанных данных
Коэффициент масштабирования (scale)
Используется для преобразования выходного напряжения
Коэффициенты калибровки для необработанных данных
Коэффициент масштабирования (scale)
Используется для преобразования выходного напряжения
Неточное выравнивание инструмента относительно оси ствола скважины
Другим источником погрешностей инклинометрии является
Неточное выравнивание инструмента относительно оси ствола скважины
Другим источником погрешностей инклинометрии является
Кратковременные изменения магнитного поля Земли
Очень важным источником остаточных погрешностей при магнитной
Кратковременные изменения магнитного поля Земли
Очень важным источником остаточных погрешностей при магнитной
Кратковременные изменения магнитного поля Земли
Приливные силы и силы в земной коре
Кратковременные изменения магнитного поля Земли
Приливные силы и силы в земной коре
Принцип действия
Обеспечение качества
Принцип действия
Обеспечение качества
Концепция
Ортогонально установленные трехосные феррозондовые магнитометры калибруются на определение напряженности магнитного поля
Концепция
Ортогонально установленные трехосные феррозондовые магнитометры калибруются на определение напряженности магнитного поля
Концепция
Любые нарушения выравнивания датчиков осей X, Y и Z оцениваются количественно
Концепция
Любые нарушения выравнивания датчиков осей X, Y и Z оцениваются количественно
Теория и практика использования зонда PCD
Выполнение инклинометрии с помощью зонда PCD
Теория и практика использования зонда PCD
Выполнение инклинометрии с помощью зонда PCD
Теория и практика использования зонда PCD
Выполнение инклинометрии с помощью зонда PCD
Теория и практика использования зонда PCD
Выполнение инклинометрии с помощью зонда PCD
Теория и практика использования зонда PCD
Выполнение инклинометрии с помощью зонда PCD
Теория и практика использования зонда PCD
Выполнение инклинометрии с помощью зонда PCD
Теория и практика использования зонда PCD
Получение данных для угла установки отклонителя
Теория и практика использования зонда PCD
Получение данных для угла установки отклонителя
Экран параметров зонда PCD
Экран параметров зонда PCD
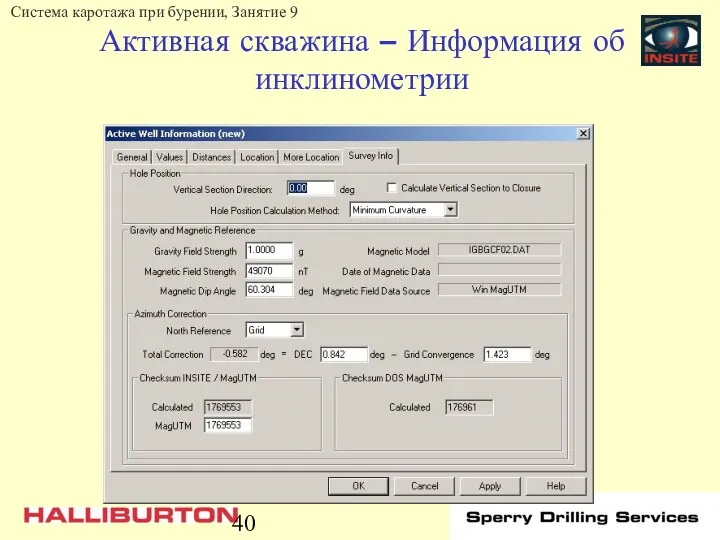
Активная скважина – Информация об инклинометрии
Активная скважина – Информация об инклинометрии
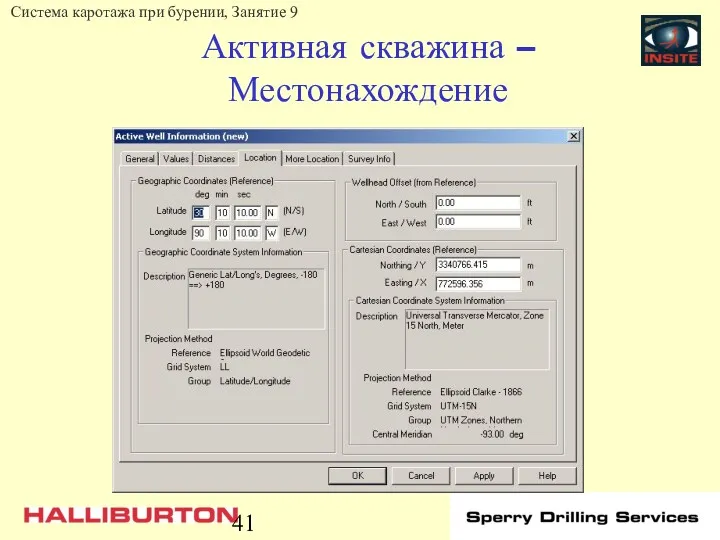
Активная скважина – Местонахождение
Активная скважина – Местонахождение
Оценка проведения инклинометрии
Источники погрешностей при инклинометрии
Оценка проведения инклинометрии
Источники погрешностей при инклинометрии
Погрешности глубины
Глубина неправильно определена
Глубина неправильно введена
Неправильно введено расстояние между
Погрешности глубины
Глубина неправильно определена
Глубина неправильно введена
Неправильно введено расстояние между
Калибровка датчика
Коэффициент масштаба (усиление)
Начало координат (смещение)
Линейность
Температурный коэффициент
Неправильное выравнивание (ось)
Калибровка датчика
Коэффициент масштаба (усиление)
Начало координат (смещение)
Линейность
Температурный коэффициент
Неправильное выравнивание (ось)
Неправильное выравнивание зонда
Неконцентричное расположение защитного кожуха
Неконцентричное расположение УБТ
Неправильное выравнивание зонда
Неконцентричное расположение защитного кожуха
Неконцентричное расположение УБТ
Неправильное выравнивание бурильной колонны
Компоновки для направленного бурения
Забойный двигатель с кривым переводником
Компоновки
Неправильное выравнивание бурильной колонны
Компоновки для направленного бурения
Забойный двигатель с кривым переводником
Компоновки
Паразитные магнитные поля
Соседние обсаженные скважины / оставленные в скважине инструменты
Магнитные пласты
Паразитные магнитные поля
Соседние обсаженные скважины / оставленные в скважине инструменты
Магнитные пласты
Рабочие характеристики зонда / датчика
Опрос датчиков
Не может выполняться одновременный опрос всех
Рабочие характеристики зонда / датчика
Опрос датчиков
Не может выполняться одновременный опрос всех
Вращение бурильной колонны во время сохранения данных инклинометрии
Перемещение по осям
Вращение бурильной колонны во время сохранения данных инклинометрии
Перемещение по осям
Вращение бурильной колонны во время сохранения данных инклинометрии
Перемещение по осям X
Вращение бурильной колонны во время сохранения данных инклинометрии
Перемещение по осям X
Продольное перемещение бурильной колонны во время сохранения данных инклинометрии
Перемещение вдоль оси
Продольное перемещение бурильной колонны во время сохранения данных инклинометрии
Перемещение вдоль оси
Вибрация зонда во время сохранения данных инклинометрии
Движение по осям X, Y
Вибрация зонда во время сохранения данных инклинометрии
Движение по осям X, Y
Обзор вычислений для инклинометрии
Обзор вычислений для инклинометрии
Терминология вычислений для инклинометрии
Точка измерений
Длина траектории
Истинная глубина по вертикали
Зенитный угол
Глубина по
Терминология вычислений для инклинометрии
Точка измерений
Длина траектории
Истинная глубина по вертикали
Зенитный угол
Глубина по
Терминология вычислений для инклинометрии
Отклонение траектории
Вертикальное сечение
Отклонение
Направление отклонения
Терминология вычислений для инклинометрии
Отклонение траектории
Вертикальное сечение
Отклонение
Направление отклонения
Точка измерений
Точка измерений представляет собой любую точку вдоль ствола скважины, в
Точка измерений
Точка измерений представляет собой любую точку вдоль ствола скважины, в
Длина траектории
Длина траектории представляет собой измеренное расстояние (фактическую длину скважины) между
Длина траектории
Длина траектории представляет собой измеренное расстояние (фактическую длину скважины) между

Угол отклонения или зенитный угол
Угол отклонения или зенитный угол представляет собой
Угол отклонения или зенитный угол
Угол отклонения или зенитный угол представляет собой

Отклонение по широте
Отклонение по широте представляет собой расстояние смещения скважины по
Отклонение по широте
Отклонение по широте представляет собой расстояние смещения скважины по
Отклонение по долготе
Отклонение по долготе представляет собой расстояние смещения скважины по
Отклонение по долготе
Отклонение по долготе представляет собой расстояние смещения скважины по
Отклонение
Отклонение представляет собой горизонтальное расстояние от устья скважины до соответствующей точки
Отклонение
Отклонение представляет собой горизонтальное расстояние от устья скважины до соответствующей точки
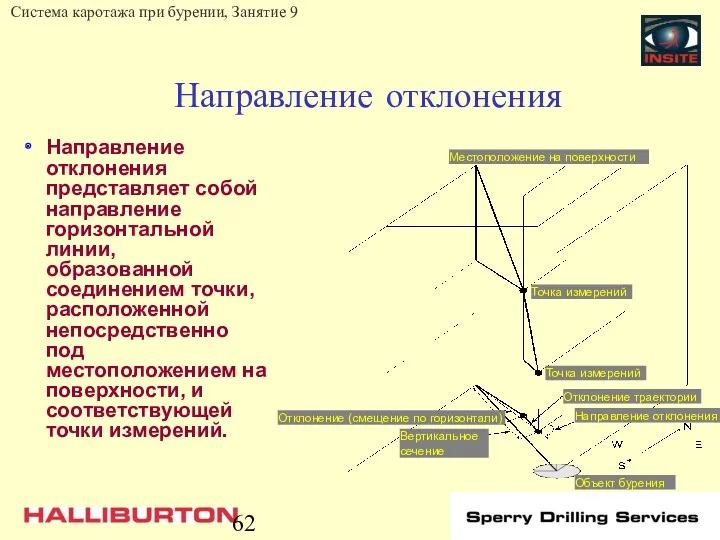
Направление отклонения
Направление отклонения представляет собой направление горизонтальной линии, образованной соединением точки,
Направление отклонения
Направление отклонения представляет собой направление горизонтальной линии, образованной соединением точки,

Искривление ствола скважины (DL) и интенсивность искривления ствола скважины (DLS)
Искривление ствола
Искривление ствола скважины (DL) и интенсивность искривления ствола скважины (DLS)
Искривление ствола
Вертикальное сечение (VS)
VS представляет собой расстояние по горизонтали, которое проходит ствол
Вертикальное сечение (VS)
VS представляет собой расстояние по горизонтали, которое проходит ствол
Методы вычислений для инклинометрии
Средний угол
Метод касательной
Радиус кривизны
Минимальная кривизна
Методы вычислений для инклинометрии
Средний угол
Метод касательной
Радиус кривизны
Минимальная кривизна
Метод касательной
Самый неточный из четырех распространенных методов
Предполагается, что ствол скважины идет
Метод касательной
Самый неточный из четырех распространенных методов
Предполагается, что ствол скважины идет
Средний угол
Положение ствола скважины рассчитывается с использованием простых тригонометрических функций
Используется в
Средний угол
Положение ствола скважины рассчитывается с использованием простых тригонометрических функций
Используется в
Радиус кривизны
Предполагается, что траектория ствола скважины лежит на цилиндре с вертикальной
Радиус кривизны
Предполагается, что траектория ствола скважины лежит на цилиндре с вертикальной
Минимальная кривизна
Предполагается, что траектория ствола скважины лежит на сфере
Истинная глубина по
Минимальная кривизна
Предполагается, что траектория ствола скважины лежит на сфере
Истинная глубина по
Магнитное поле Земли
Всегда находится в движении
Изменяется для различных мест и с
Магнитное поле Земли
Всегда находится в движении
Изменяется для различных мест и с
 Профессия горничная
Профессия горничная Вероятностный подход к определению количества информации
Вероятностный подход к определению количества информации Наша классная газета..4 класс 2015-2016 учебный год
Наша классная газета..4 класс 2015-2016 учебный год Анализ деятельности Уинстона Черчилля в контексте личного PR (самопиар)
Анализ деятельности Уинстона Черчилля в контексте личного PR (самопиар) Образование в России в XVIII веке
Образование в России в XVIII веке Топливно-энергетический комплекс. (Лекция 5)
Топливно-энергетический комплекс. (Лекция 5) Методы и технологии управления КА многоспутниковых космических систем
Методы и технологии управления КА многоспутниковых космических систем Судьбою вызваны к доске...
Судьбою вызваны к доске... Электроснабжение участка шахты
Электроснабжение участка шахты Кожные и температурные ощущения
Кожные и температурные ощущения Технология оперативного температурно-прочностного контроля бетона при выдерживании конструкций при отрицательных температурах
Технология оперативного температурно-прочностного контроля бетона при выдерживании конструкций при отрицательных температурах Организация транспортного хозяйства в нефтегазохимическом комплексе. (Занятие 1-2)
Организация транспортного хозяйства в нефтегазохимическом комплексе. (Занятие 1-2) География сельского хозяйства.
География сельского хозяйства. Проектирование контроллера управления звуковым таймером
Проектирование контроллера управления звуковым таймером Правила охраны труда на автомобильном транспорте
Правила охраны труда на автомобильном транспорте Жестокое обращение с детьми в семье
Жестокое обращение с детьми в семье Муниципальная целевая программа Развитие сети внутрипоселковых дорог в Мартыновском сельском поселении на 2014-2016 годы
Муниципальная целевая программа Развитие сети внутрипоселковых дорог в Мартыновском сельском поселении на 2014-2016 годы Использование здоровьесберегающих технологий в работе школьного логопеда
Использование здоровьесберегающих технологий в работе школьного логопеда Мягкая игрушка Котенок.
Мягкая игрушка Котенок. Научно-производственное предприятие Тепловодохран
Научно-производственное предприятие Тепловодохран Зайчик - дергунчик
Зайчик - дергунчик ФОНЕМАТИЧЕСКИЙ СЛУХ КАК СРЕДСТВО ФОРМИРОВАНИЯ ЗВУКОВОГО АНАЛИЗА И СИНТЕЗА
ФОНЕМАТИЧЕСКИЙ СЛУХ КАК СРЕДСТВО ФОРМИРОВАНИЯ ЗВУКОВОГО АНАЛИЗА И СИНТЕЗА Татьянин день. День студентов
Татьянин день. День студентов Предмет и задачи информатики. (Лекция 1)
Предмет и задачи информатики. (Лекция 1) Формула успеха – труд по призванию. (9 и 11 класс)
Формула успеха – труд по призванию. (9 и 11 класс) Производственная система ОАО Шадринский автоагрегатный завод
Производственная система ОАО Шадринский автоагрегатный завод Современные постановки пьесы Чайка А.П. Чехова на сцене русских театров
Современные постановки пьесы Чайка А.П. Чехова на сцене русских театров Пересечения и примыкания автомобильных дорог. Виды развязок
Пересечения и примыкания автомобильных дорог. Виды развязок