- Система линейной телемеханики

Содержание
- 2. Система линейной телемеханики Перечень вопросов разбираемых в теме: Перечень информации, передаваемой с линейной части.
- 3. Система линейной телемеханики Перечень вопросов, рассматриваемых в рамках занятия: Назначение и функциональный состав системы Технические требования
- 4. Система линейной телемеханики Нормативно-технические документы: РД-35.240.50-КТН-109-13 «Автоматизация и телемеханизация технологического оборудования площадочных и линейных объектов магистральных
- 5. Назначение и функциональный состав системы Глоссарий Линейная телемеханика – это совокупность устройств ПУ и КП, периферийного
- 6. Назначение и функциональный состав системы Функции реализуемые системой линейной телемеханики: управление оборудованием линейной части МТ из
- 7. Назначение и функциональный состав системы Система линейной телемеханики представляет из себя трёхуровневую структуру:
- 8. Назначение и функциональный состав системы К нижнему уровню линейной телемеханики относятся: контрольно-измерительные приборы, в том числе
- 9. Назначение и функциональный состав системы К среднему уровню линейной телемеханики относятся: программируемый логический котроллер ЛТМ; контроллер
- 10. Назначение и функциональный состав системы К верхнему уровню линейной телемеханики относится: коммуникационное оборудование (коммутаторы, модемы); сервер
- 11. Назначение и функциональный состав системы ЛТМ функционально состоит из: преобразователей параметров технологического процесса в аналоговые и
- 12. Технические требования к системе Система ЛТМ должна выполняться на базе микропроцессорных средств ПЛК ЛТМ должен иметь
- 13. Схемы питания КП Питание осуществляется напряжением 220В от ЩСУ поступающее на клеммники ХТ01 (L, N, PE).
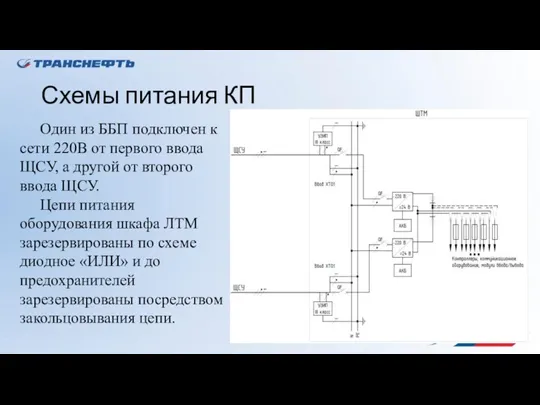
- 14. Схемы питания КП Один из ББП подключен к сети 220В от первого ввода ЩСУ, а другой
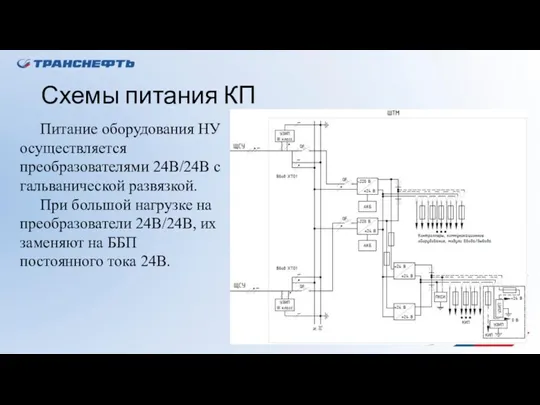
- 15. Схемы питания КП Питание оборудования НУ осуществляется преобразователями 24В/24В с гальванической развязкой. При большой нагрузке на
- 16. Схемы питания КП На групповой линии питания полевого оборудования, после объединения блоков питания через диодное «ИЛИ»,
- 17. Схемы питания КП Для контроля состояния системы электропитания шкафа телемеханики предусмотрен мониторинг работы её компонентов. Мониторинг
- 18. Организация каналов связи ТМ
- 19. Работа со смежными системами: СОУ, СДКУ, ЦСПА
- 20. Работа со смежными системами: СОУ, СДКУ, ЦСПА Структурная схема системы ЛТМ должна обеспечивать возможность взаимодействия со
- 21. Работа со смежными системами: СОУ, СДКУ, ЦСПА ЦСПА взаимодействует с ЛТМ через адресное пространство сервера ввода/вывода
- 22. Работа со смежными системами: СОУ, СДКУ, ЦСПА Если на линейном объекте СОУ реализуется как независимая система,
- 23. Синхронизация времени В качестве системного времени в системах автоматизации и телемеханизации устанавливается московское время, синхронизация времени
- 25. Скачать презентацию
Система линейной телемеханики
Перечень вопросов разбираемых в теме:
Перечень информации, передаваемой с линейной
Система линейной телемеханики
Перечень вопросов разбираемых в теме:
Перечень информации, передаваемой с линейной
Система линейной телемеханики
Перечень вопросов, рассматриваемых в рамках занятия:
Назначение и функциональный состав
Система линейной телемеханики
Перечень вопросов, рассматриваемых в рамках занятия:
Назначение и функциональный состав
Система линейной телемеханики
Нормативно-технические документы:
РД-35.240.50-КТН-109-13 «Автоматизация и телемеханизация технологического оборудования площадочных и
Система линейной телемеханики
Нормативно-технические документы:
РД-35.240.50-КТН-109-13 «Автоматизация и телемеханизация технологического оборудования площадочных и
Назначение и функциональный состав системы
Глоссарий
Линейная телемеханика – это совокупность устройств ПУ
Назначение и функциональный состав системы
Глоссарий
Линейная телемеханика – это совокупность устройств ПУ
Назначение и функциональный состав системы
Функции реализуемые системой линейной телемеханики:
управление оборудованием линейной
Назначение и функциональный состав системы
Функции реализуемые системой линейной телемеханики:
управление оборудованием линейной
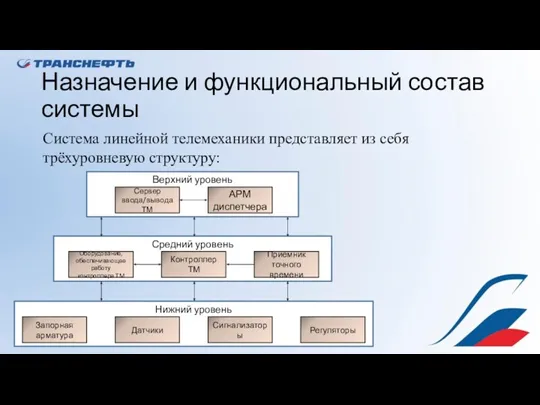
Назначение и функциональный состав системы
Система линейной телемеханики представляет из себя трёхуровневую
Назначение и функциональный состав системы
Система линейной телемеханики представляет из себя трёхуровневую
Назначение и функциональный состав системы
К нижнему уровню линейной телемеханики относятся:
контрольно-измерительные приборы,
Назначение и функциональный состав системы
К нижнему уровню линейной телемеханики относятся:
контрольно-измерительные приборы,
Назначение и функциональный состав системы
К среднему уровню линейной телемеханики относятся:
программируемый логический
Назначение и функциональный состав системы
К среднему уровню линейной телемеханики относятся:
программируемый логический
Назначение и функциональный состав системы
К верхнему уровню линейной телемеханики относится:
коммуникационное оборудование
Назначение и функциональный состав системы
К верхнему уровню линейной телемеханики относится:
коммуникационное оборудование
Назначение и функциональный состав системы
ЛТМ функционально состоит из:
преобразователей параметров технологического процесса
Назначение и функциональный состав системы
ЛТМ функционально состоит из:
преобразователей параметров технологического процесса
Технические требования к системе
Система ЛТМ должна выполняться на базе микропроцессорных средств
ПЛК
Технические требования к системе
Система ЛТМ должна выполняться на базе микропроцессорных средств
ПЛК

Схемы питания КП
Питание осуществляется напряжением 220В от ЩСУ поступающее на клеммники
Схемы питания КП
Питание осуществляется напряжением 220В от ЩСУ поступающее на клеммники
Схемы питания КП
Один из ББП подключен к сети 220В от первого
Схемы питания КП
Один из ББП подключен к сети 220В от первого
Схемы питания КП
Питание оборудования НУ осуществляется преобразователями 24В/24В с гальванической развязкой.
При
Схемы питания КП
Питание оборудования НУ осуществляется преобразователями 24В/24В с гальванической развязкой.
При

Схемы питания КП
На групповой линии питания полевого оборудования, после объединения блоков
Схемы питания КП
На групповой линии питания полевого оборудования, после объединения блоков
Схемы питания КП
Для контроля состояния системы электропитания шкафа телемеханики предусмотрен мониторинг
Схемы питания КП
Для контроля состояния системы электропитания шкафа телемеханики предусмотрен мониторинг
Организация каналов связи ТМ
Организация каналов связи ТМ

Работа со смежными системами: СОУ, СДКУ, ЦСПА
Работа со смежными системами: СОУ, СДКУ, ЦСПА
Работа со смежными системами: СОУ, СДКУ, ЦСПА
Структурная схема системы ЛТМ должна
Работа со смежными системами: СОУ, СДКУ, ЦСПА
Структурная схема системы ЛТМ должна
Работа со смежными системами: СОУ, СДКУ, ЦСПА
ЦСПА взаимодействует с ЛТМ через
Работа со смежными системами: СОУ, СДКУ, ЦСПА
ЦСПА взаимодействует с ЛТМ через

Работа со смежными системами: СОУ, СДКУ, ЦСПА
Если на линейном объекте СОУ
Работа со смежными системами: СОУ, СДКУ, ЦСПА
Если на линейном объекте СОУ
Синхронизация времени
В качестве системного времени в системах автоматизации и телемеханизации устанавливается
Синхронизация времени
В качестве системного времени в системах автоматизации и телемеханизации устанавливается
 презентация работа с родителями по фгос
презентация работа с родителями по фгос Дискриминация и права человека. Лекция 2
Дискриминация и права человека. Лекция 2 Общие вопросы ВИЧ\СПИД
Общие вопросы ВИЧ\СПИД Питательные среды. Методы культивирования микробов и аппаратура. Учет результатов анализа воздуха
Питательные среды. Методы культивирования микробов и аппаратура. Учет результатов анализа воздуха Благоустройство набережной р. Охты (Муниципальный округ Малая Охта)
Благоустройство набережной р. Охты (Муниципальный округ Малая Охта) Балаларда ерін аурулары
Балаларда ерін аурулары Порядок оборудования и содержания мостовой переправы зимой (для подразделений инженерных войск)
Порядок оборудования и содержания мостовой переправы зимой (для подразделений инженерных войск) Открытое занятие для детей подготовительной группы Дружба начинается с улыбки.
Открытое занятие для детей подготовительной группы Дружба начинается с улыбки. Теория государства и права
Теория государства и права Япония (1)
Япония (1) Внеурочное занятие по курсу Уроки нравственности по теме Золотое правило нравственности
Внеурочное занятие по курсу Уроки нравственности по теме Золотое правило нравственности Технология устройства кровельных покрытий
Технология устройства кровельных покрытий Загадки по правилам дорожного движения для 1 класса
Загадки по правилам дорожного движения для 1 класса М.И. Глинка. Опера Руслан и Людмила
М.И. Глинка. Опера Руслан и Людмила Права ребенка
Права ребенка Сүйек. Эктопиялық дамуы
Сүйек. Эктопиялық дамуы Первая помощь при повреждении грудной клетки и живота
Первая помощь при повреждении грудной клетки и живота Эксплуатация трансформаторов
Эксплуатация трансформаторов Многоуровневые подвесные потолки
Многоуровневые подвесные потолки Модернизированная переносная станция наземной разведки ПСНР-8М
Модернизированная переносная станция наземной разведки ПСНР-8М ковид
ковид Somebody That I Used To Know
Somebody That I Used To Know Международный день коренных народов мира
Международный день коренных народов мира Башкортостан - жемчужина Урала
Башкортостан - жемчужина Урала Укусы ядовитых змей и насекомых
Укусы ядовитых змей и насекомых Напряженность электростатического поля
Напряженность электростатического поля Специальное образование в меняющемся мире. Россия
Специальное образование в меняющемся мире. Россия Как мы весело живем!
Как мы весело живем!