- Системы управления регулируемого электропривода на основе преобразователей частоты

Содержание
- 2. ПРИНЦИПЫ ПОСТРОЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ Классификация и принципы построения скалярных преобразователей частоты Преобразователи частоты (ПЧ) предназначены для
- 3. Классификация и принципы построения преобразователей частоты В ДПЧ первое звено представляет собой выпрямитель (управляемый или неуправ-
- 4. Классификация и принципы построения преобразователей частоты ДПЧ позволяют получить на выходе частоты как меньшие, так и
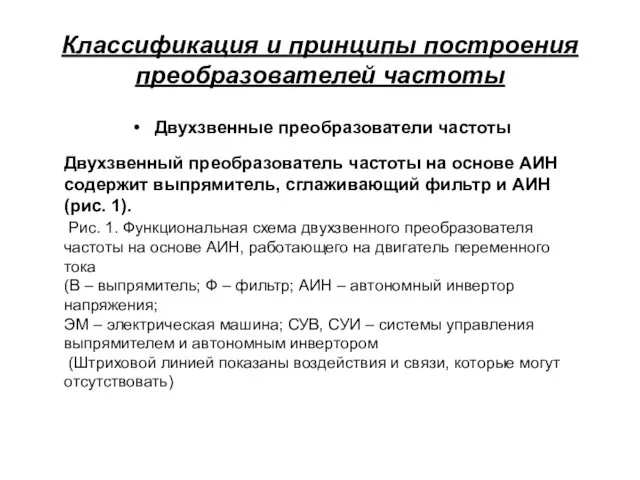
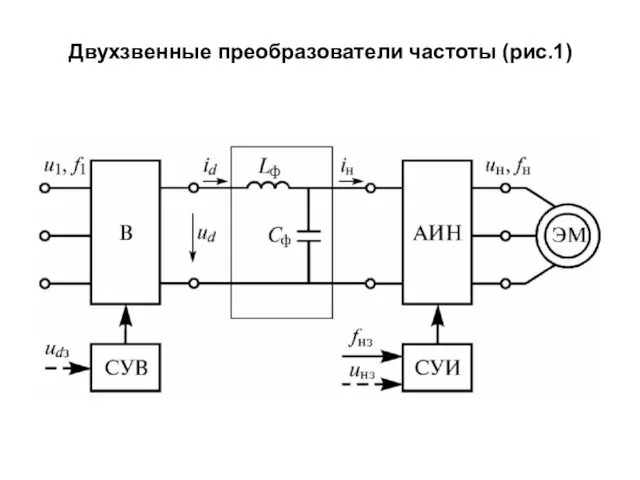
- 5. Классификация и принципы построения преобразователей частоты Двухзвенные преобразователи частоты Двухзвенный преобразователь частоты на основе АИН содержит
- 6. Двухзвенные преобразователи частоты (рис.1)
- 7. Двухзвенные преобразователи частоты Сглаживающий фильтр обычно представляет собой Г-образный LC-фильтр. Выпрямитель может быть управляемым и неуправляемым,
- 8. Двухзвенные преобразователи частоты Регулирование напряжения на выходе ПЧ на основе АИН может осуществляться как с помощью
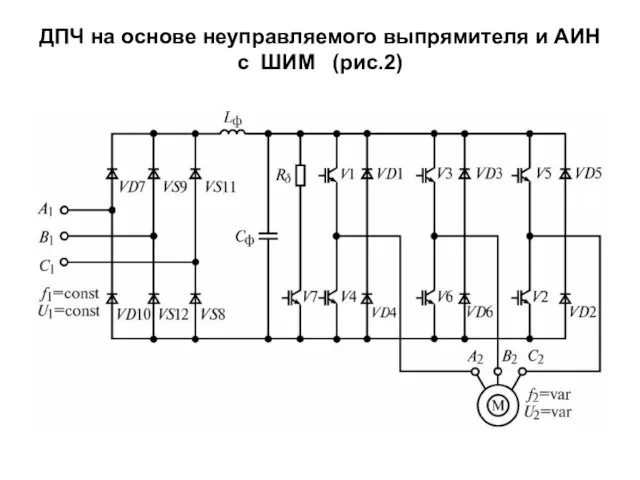
- 9. ДПЧ на основе неуправляемого выпрямителя и АИН сШИМ На рис. 2 приведена схема двухзвенного преобразователя частоты
- 10. ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ (рис.2)
- 11. ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ Неуправляемый выпрямитель выполнен на диодах VD7 -
- 12. ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ Торможение обеспечивается переводом АИН в режим управляемого
- 13. ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ Описанное торможение получило в литературе название инверторного
- 14. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ ЭНЕРГИИ На рис. 3 приведена схема ДПЧ, обеспечивающего передачу энергии в обоих
- 15. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ ЭНЕРГИИ При торможении ОПН2, подключенный к двигателю переходит в выпрямительный режим, а
- 16. СХЕМА ПЧ С РЕКУПЕРАЦИЕЙ (Рис.3)
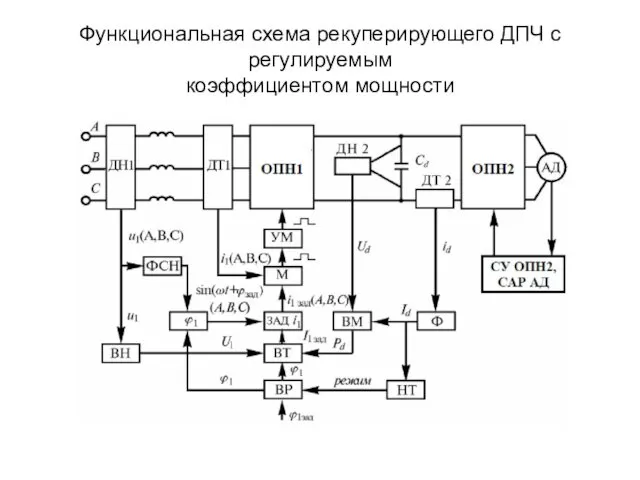
- 17. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ На рис. 13.6 приведена функциональная схема рекуперирующего ДПЧ с регулируемым коэффициентом мощности.
- 18. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ Требуе- мая мощность на стороне постоянного тока определяется измерением сред- них значений
- 19. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ Блок ФСН формирует синусоидальное на- пряжение, повторяющее напряжение сети, а блок «φ1»
- 20. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ Блок НТ определяет 310 направление тока (выпрямительный или инверторный режим). Блок выбора
- 21. Функциональная схема рекуперирующего ДПЧ с регулируемым коэффициентом мощности
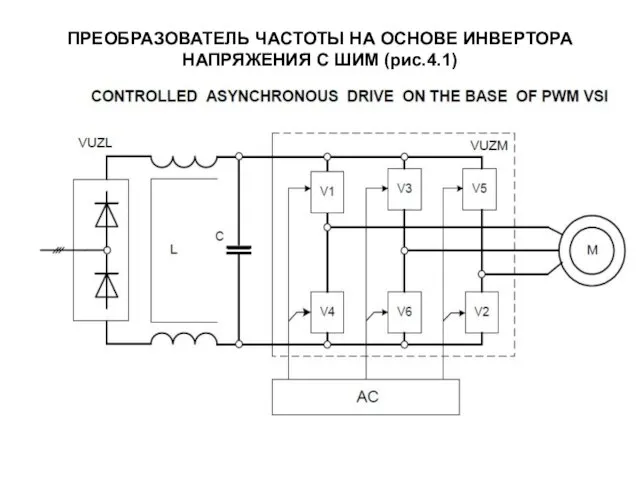
- 22. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИМ Схема главных цепей Главная цепь (рис. 4.1) содержит:
- 23. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИМ (рис.4.1)
- 24. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИМ (рис.4.1)
- 25. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИМ (рис.4.2)
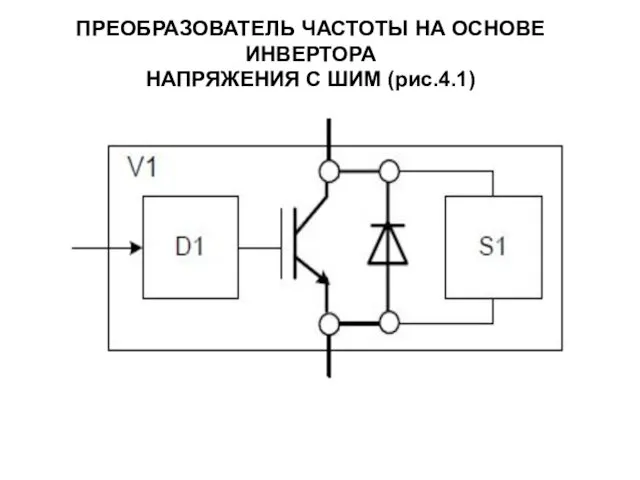
- 26. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИМ Инвертор содержит шесть полупроводниковых ключей. Каждый ключ содержит
- 27. ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИМ Ключи в каждой паре, например V1 и V4,
- 28. ПРИНЦИП ШИМ
- 29. ПРИНЦИП ШИМ
- 30. ПРИНЦИП ШИМ
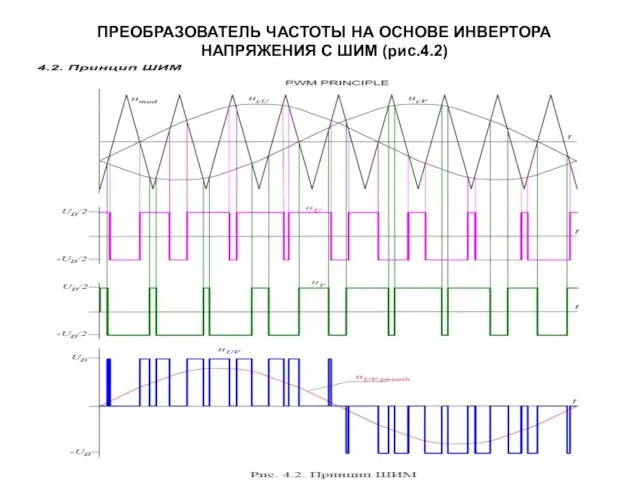
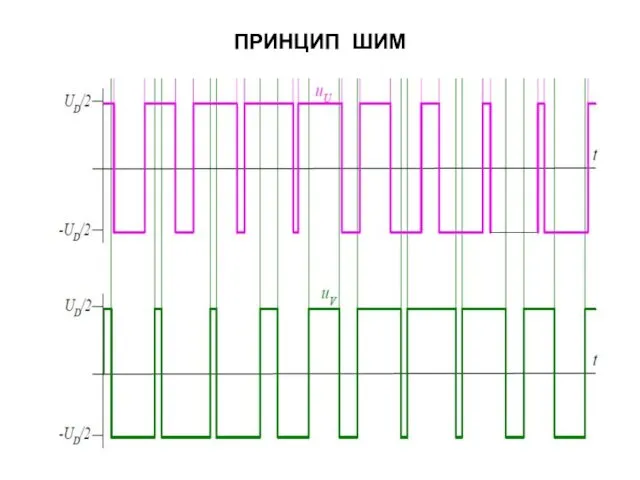
- 31. ПРИНЦИП ШИМ В большинстве случаев переключение ключей осуществляется путём сравнения управляющего сигнала (ucU в нашем случае)
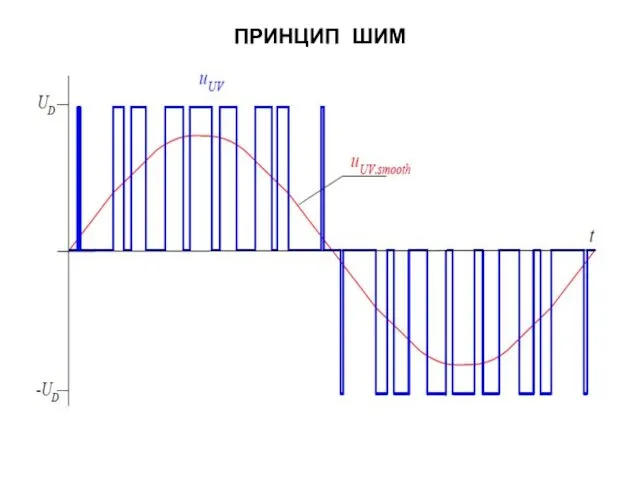
- 32. ПРИНЦИП ШИМ Кроме сглаженных составляющих, линейные напряжения статора содержат также пульсации. При высокой частоте модуляции пульсации
- 33. ПРИНЦИП ШИМ Однако пульсации напряжения с крутыми перепадами оказывают негативное влияние на изоляцию обмоток статора. Поэтому
- 34. Торможение в электроприводах на основе ИН с ШИМ Диодный выпрямитель не может передавать энергию в питающую
- 35. Торможение в электроприводах на основе ИН с ШИМ Если эта энергия достаточно велика, такой вариант невыгоден.
- 36. Процессы при включении питания главных цепей При включении питания в схеме рис. 4.1 напряжение конденсатора устанавливается
- 37. Процессы при включении питания главных цепей Более радикальное решение – регулируемый тиристорный выпрямитель. Регулирование выполняется таким
- 38. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ С ВЕКТОРНЫМ УПРАВЛЕНИЕМ Формирование компонент тока Принцип действия асинхронного электропривода с векторным
- 39. Рис. 7.1. Простой пример системы векторного управления асинхронного ЭП
- 40. Векторное управление асинхронным ЭП
- 41. Векторное управление асинхронным ЭП
- 42. Векторное управление асинхронным ЭП
- 43. Векторное управление асинхронным ЭП
- 44. Векторное управление ЭП
- 45. ВЕКТОРНОЕ УПРАВЛЕНИЕ
- 46. ВЕКТОРНОЕ УПРАВЛЕНИЕ
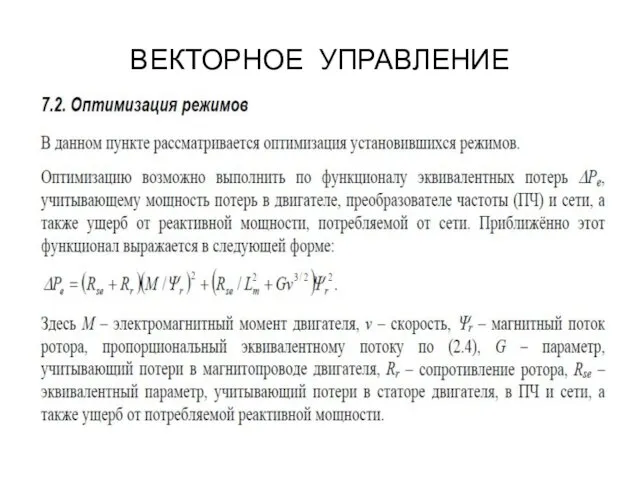
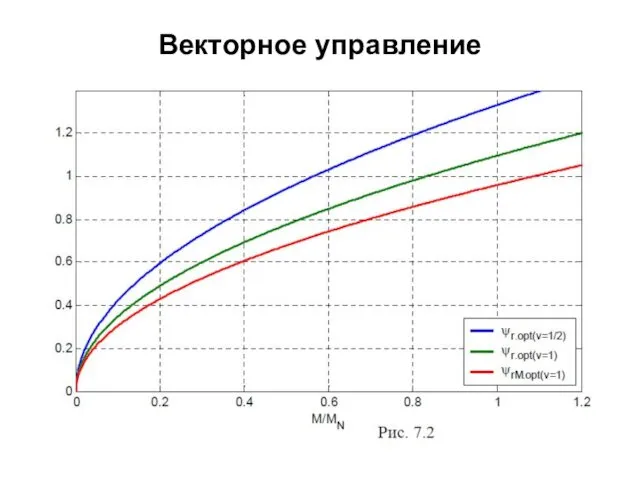
- 47. Векторное управление
- 48. Векторное управление
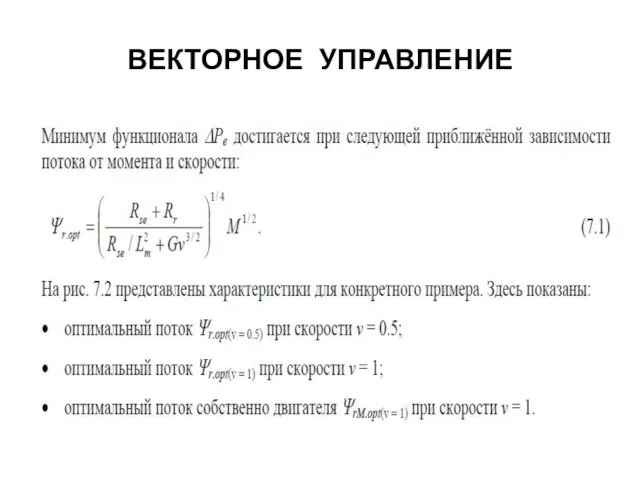
- 49. Векторное управление
- 50. Векторное управление
- 51. Векторное управление
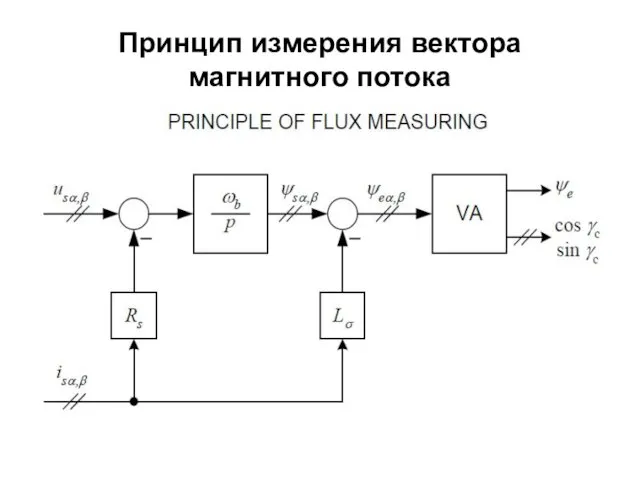
- 52. Принцип измерения вектора магнитного потока
- 53. Принцип измерения вектора магнитного потока проблема – сложная. Имеют место серьёзные трудности, особенно в приводах без
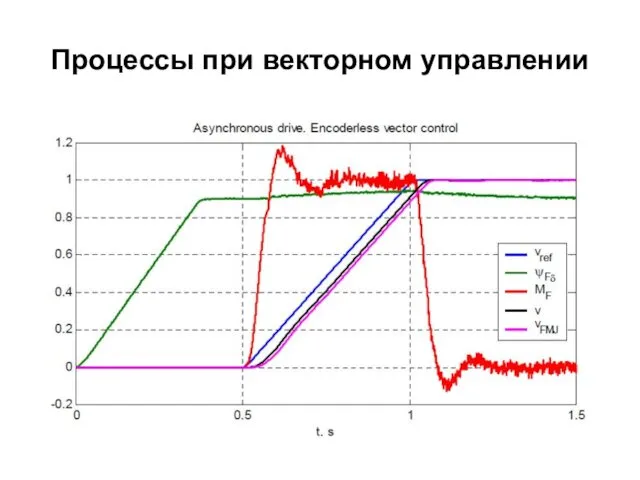
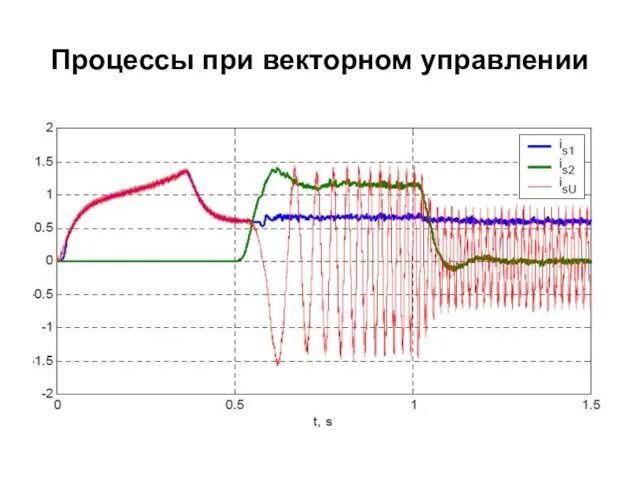
- 54. Процессы электропривода с векторным управлением Пример процессов показан на рис. 7.4. Показаны следующие переменные:
- 55. Процессы ЭП с векторным управлением Показаны два этапа, проходящие последовательно во времени: • подготовка электропривода к
- 56. Процессы при векторном управлении
- 57. Процессы при векторном управлении
- 58. Процессы при векторном управлении На подготовительном этапе магнитный поток нарастает с заданным темпом; для этого соответствующим
- 59. Процессы при векторном управлении В процессе работы компонента тока is1 практически не изменяется, необходимый момент обеспечивается
- 61. Скачать презентацию
ПРИНЦИПЫ ПОСТРОЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
Классификация и принципы построения скалярных преобразователей частоты
Преобразователи частоты
ПРИНЦИПЫ ПОСТРОЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
Классификация и принципы построения скалярных преобразователей частоты
Преобразователи частоты
Классификация и принципы построения преобразователей частоты
В ДПЧ первое звено представляет собой
Классификация и принципы построения преобразователей частоты
В ДПЧ первое звено представляет собой
Классификация и принципы построения преобразователей частоты
ДПЧ позволяют получить на выходе частоты
Классификация и принципы построения преобразователей частоты
ДПЧ позволяют получить на выходе частоты
Классификация и принципы построения преобразователей частоты
Двухзвенные преобразователи частоты
Двухзвенный преобразователь частоты
Классификация и принципы построения преобразователей частоты
Двухзвенные преобразователи частоты
Двухзвенный преобразователь частоты
Двухзвенные преобразователи частоты (рис.1)
Двухзвенные преобразователи частоты (рис.1)
Двухзвенные преобразователи частоты
Сглаживающий фильтр обычно представляет собой Г-образный LC-фильтр.
Выпрямитель может
Двухзвенные преобразователи частоты
Сглаживающий фильтр обычно представляет собой Г-образный LC-фильтр.
Выпрямитель может
Двухзвенные преобразователи частоты
Регулирование напряжения на выходе ПЧ на основе АИН может
Двухзвенные преобразователи частоты
Регулирование напряжения на выходе ПЧ на основе АИН может
ДПЧ на основе неуправляемого выпрямителя и АИН сШИМ
На рис. 2 приведена
ДПЧ на основе неуправляемого выпрямителя и АИН сШИМ
На рис. 2 приведена
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ (рис.2)
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ (рис.2)
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ
Неуправляемый выпрямитель выполнен
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ
Неуправляемый выпрямитель выполнен
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ
Торможение обеспечивается переводом
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ
Торможение обеспечивается переводом
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ
Описанное торможение получило
ДПЧ на основе неуправляемого выпрямителя и АИН с ШИМ
Описанное торможение получило
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ ЭНЕРГИИ
На рис. 3 приведена схема ДПЧ, обеспечивающего
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ ЭНЕРГИИ
На рис. 3 приведена схема ДПЧ, обеспечивающего
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ ЭНЕРГИИ
При торможении ОПН2, подключенный к двигателю переходит
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ ЭНЕРГИИ
При торможении ОПН2, подключенный к двигателю переходит
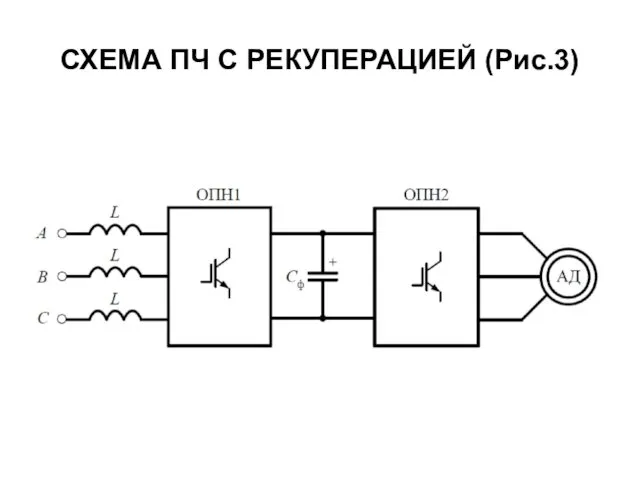
СХЕМА ПЧ С РЕКУПЕРАЦИЕЙ (Рис.3)
СХЕМА ПЧ С РЕКУПЕРАЦИЕЙ (Рис.3)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
На рис. 13.6 приведена функциональная схема рекуперирующего ДПЧ
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
На рис. 13.6 приведена функциональная схема рекуперирующего ДПЧ
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
Требуе-
мая мощность на стороне постоянного тока определяется измерением
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
Требуе-
мая мощность на стороне постоянного тока определяется измерением
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
Блок ФСН формирует синусоидальное на-
пряжение, повторяющее напряжение сети,
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
Блок ФСН формирует синусоидальное на-
пряжение, повторяющее напряжение сети,
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
Блок НТ определяет
310
направление тока (выпрямительный или инверторный режим).
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С РЕКУПЕРАЦИЕЙ
Блок НТ определяет
310
направление тока (выпрямительный или инверторный режим).
Функциональная схема рекуперирующего ДПЧ с регулируемым
коэффициентом мощности
Функциональная схема рекуперирующего ДПЧ с регулируемым
коэффициентом мощности
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ
Схема главных цепей
Главная цепь (рис.
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ
Схема главных цепей
Главная цепь (рис.
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ (рис.4.1)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ (рис.4.1)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ (рис.4.1)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ (рис.4.1)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ (рис.4.2)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ (рис.4.2)
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ
Инвертор содержит шесть полупроводниковых ключей.
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ
Инвертор содержит шесть полупроводниковых ключей.
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ
Ключи в каждой паре, например
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НА ОСНОВЕ ИНВЕРТОРА
НАПРЯЖЕНИЯ С ШИМ
Ключи в каждой паре, например

ПРИНЦИП ШИМ
ПРИНЦИП ШИМ
ПРИНЦИП ШИМ
ПРИНЦИП ШИМ
ПРИНЦИП ШИМ
ПРИНЦИП ШИМ
ПРИНЦИП ШИМ
В большинстве случаев переключение ключей осуществляется путём сравнения
управляющего сигнала (ucU
ПРИНЦИП ШИМ
В большинстве случаев переключение ключей осуществляется путём сравнения
управляющего сигнала (ucU
ПРИНЦИП ШИМ
Кроме сглаженных составляющих, линейные напряжения статора содержат также пульсации.
При
ПРИНЦИП ШИМ
Кроме сглаженных составляющих, линейные напряжения статора содержат также пульсации.
При
ПРИНЦИП ШИМ
Однако пульсации напряжения с крутыми перепадами оказывают негативное влияние
на изоляцию
ПРИНЦИП ШИМ
Однако пульсации напряжения с крутыми перепадами оказывают негативное влияние
на изоляцию
Торможение в электроприводах на основе ИН с ШИМ
Диодный выпрямитель не может
Торможение в электроприводах на основе ИН с ШИМ
Диодный выпрямитель не может
Торможение в электроприводах на основе ИН с ШИМ
Если эта энергия достаточно
Торможение в электроприводах на основе ИН с ШИМ
Если эта энергия достаточно
Процессы при включении питания главных цепей
При включении питания в схеме рис.
Процессы при включении питания главных цепей
При включении питания в схеме рис.
Процессы при включении питания главных цепей
Более радикальное решение – регулируемый
тиристорный
Процессы при включении питания главных цепей
Более радикальное решение – регулируемый
тиристорный
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ С
ВЕКТОРНЫМ УПРАВЛЕНИЕМ
Формирование компонент тока
Принцип действия асинхронного
ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ С
ВЕКТОРНЫМ УПРАВЛЕНИЕМ
Формирование компонент тока
Принцип действия асинхронного

Рис. 7.1. Простой пример системы векторного управления асинхронного ЭП
Рис. 7.1. Простой пример системы векторного управления асинхронного ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление асинхронным ЭП
Векторное управление ЭП
Векторное управление ЭП
ВЕКТОРНОЕ УПРАВЛЕНИЕ
ВЕКТОРНОЕ УПРАВЛЕНИЕ
ВЕКТОРНОЕ УПРАВЛЕНИЕ
ВЕКТОРНОЕ УПРАВЛЕНИЕ
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Векторное управление
Принцип измерения вектора магнитного потока
Принцип измерения вектора магнитного потока
Принцип измерения вектора магнитного потока
проблема – сложная. Имеют место серьёзные трудности,
Принцип измерения вектора магнитного потока
проблема – сложная. Имеют место серьёзные трудности,
Процессы электропривода с векторным управлением
Пример процессов показан на рис. 7.4.
Показаны следующие
Процессы электропривода с векторным управлением
Пример процессов показан на рис. 7.4.
Показаны следующие
Процессы ЭП с векторным управлением
Показаны два этапа, проходящие последовательно во времени:
•
Процессы ЭП с векторным управлением
Показаны два этапа, проходящие последовательно во времени:
•
Процессы при векторном управлении
Процессы при векторном управлении
Процессы при векторном управлении
Процессы при векторном управлении
Процессы при векторном управлении
На подготовительном этапе магнитный поток нарастает с заданным
Процессы при векторном управлении
На подготовительном этапе магнитный поток нарастает с заданным
Процессы при векторном управлении
В процессе работы компонента тока is1 практически не
Процессы при векторном управлении
В процессе работы компонента тока is1 практически не
 Техническая акустика и защита от шума. Лекция №5
Техническая акустика и защита от шума. Лекция №5 Технологии индустриального производства
Технологии индустриального производства Гражданское общество и правовое государство
Гражданское общество и правовое государство LCD или жидкокристаллический дисплей
LCD или жидкокристаллический дисплей Выставка поделок ко Дню Победы
Выставка поделок ко Дню Победы Реальная математика. Практические расчеты по формулам
Реальная математика. Практические расчеты по формулам Формирование коммуникативных способностей у старших дошкольников
Формирование коммуникативных способностей у старших дошкольников Электрические машины
Электрические машины Потребности в перемещении людей и товаров,
Потребности в перемещении людей и товаров, Генеральный план. Бакунинская ул.,д. 60, стр 4, 60/1, ЦАО Бесманный
Генеральный план. Бакунинская ул.,д. 60, стр 4, 60/1, ЦАО Бесманный Әсіпорынның архитектуралық құрылыс
Әсіпорынның архитектуралық құрылыс Дети и митинги
Дети и митинги Призентация программы Доброморье
Призентация программы Доброморье Katolicka nauka społeczna
Katolicka nauka społeczna Концепция глубокоэшелонированной защиты
Концепция глубокоэшелонированной защиты Базовые теории воспитания и развития личностин
Базовые теории воспитания и развития личностин Уроки настоящего Сириус в школе
Уроки настоящего Сириус в школе Событие как формат оценки успешности освоения и применения учащимися Универсальных Учебных Действий
Событие как формат оценки успешности освоения и применения учащимися Универсальных Учебных Действий Практическая работа по теме Вашингтон
Практическая работа по теме Вашингтон Ремонт (1 этаж)
Ремонт (1 этаж) Известные личности зарубежной литературы
Известные личности зарубежной литературы Путешествие на Чёрное и Азовское море
Путешествие на Чёрное и Азовское море Печатные формы глубокой печати
Печатные формы глубокой печати Comme Des Garcons. История создания и имидж бренда
Comme Des Garcons. История создания и имидж бренда Стекло. История стекла. Свойства стекла
Стекло. История стекла. Свойства стекла презентация Изготовление шипа с полупотёмком
презентация Изготовление шипа с полупотёмком Презентация к празднику посвященному Дню защитника Отечества Мой папа-самый, самый!
Презентация к празднику посвященному Дню защитника Отечества Мой папа-самый, самый! Регуляция клеточной активности. Роль регуляторных механизмов для жизнедеятельности клетки
Регуляция клеточной активности. Роль регуляторных механизмов для жизнедеятельности клетки