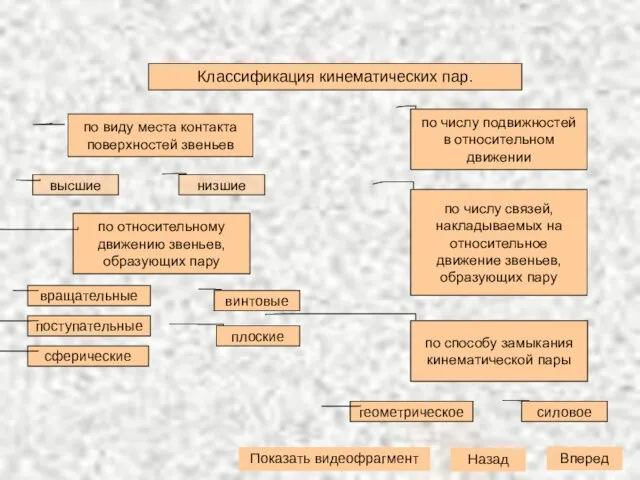
- Структура механизмов

Содержание
- 2. Вперед Введение. Общие требования к разделу структуры в курсовой работе по курсу ТММ. «Структурный анализ рычажного
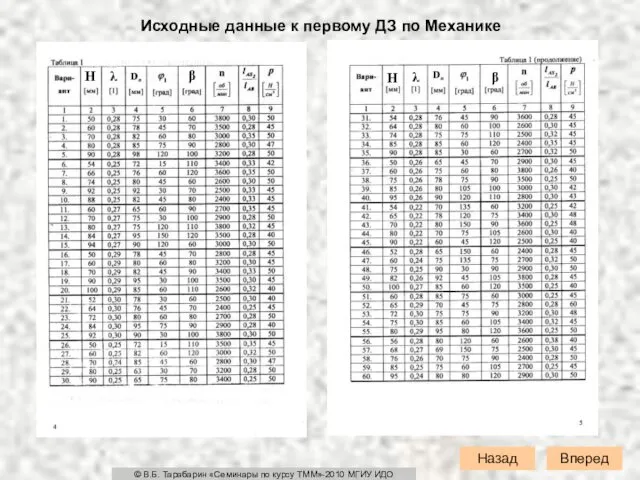
- 3. Вперед Исходные данные к первому ДЗ по Механике Назад © В.Б. Тарабарин «Семинары по курсу ТММ»-2010
- 4. Показать видеофрагмент Вперед Назад
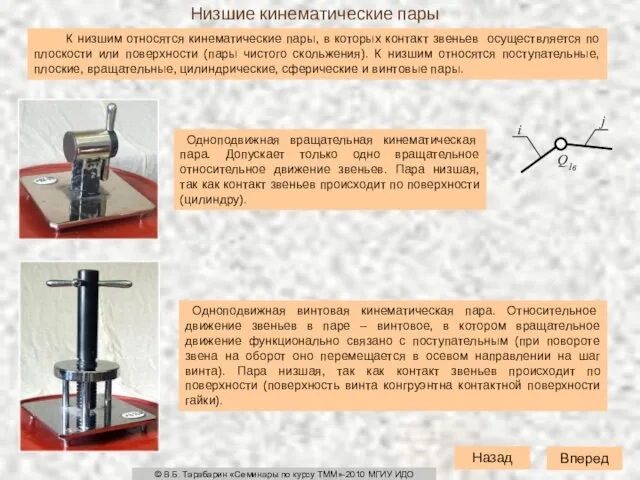
- 5. Низшие кинематические пары К низшим относятся кинематические пары, в которых контакт звеньев осуществляется по плоскости или
- 6. Поступательная кинематическая пара Вперед Назад © В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
- 7. Одноподвижная вращательная кинематическая пара. Допускает только одно вращательное относительное движение звеньев. Пара низшая, так как контакт
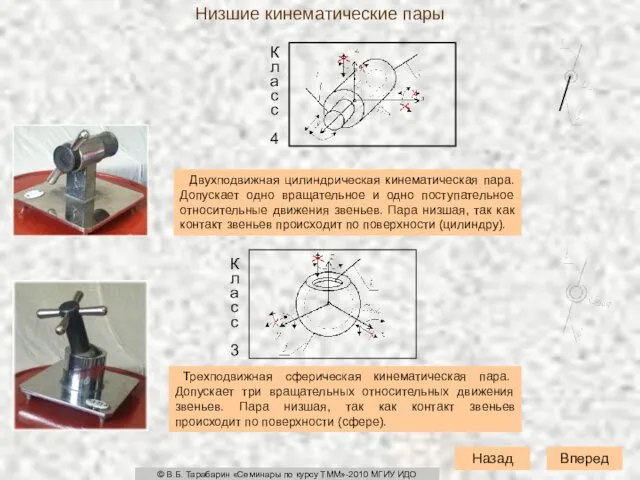
- 8. Низшие кинематические пары Трехподвижная сферическая кинематическая пара. Допускает три вращательных относительных движения звеньев. Пара низшая, так
- 9. Низшая цилиндрическая кинематическая пара Вперед Назад © В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
- 10. Низшая сферическая кинематическая пара Вперед Назад © В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
- 11. Высшие кинематические пары К высшим относятся кинематические пары, в которых контакт звеньев осуществляется по линиям или
- 12. Высшая кинематическая пара с линейным контактом Вперед Назад © В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ
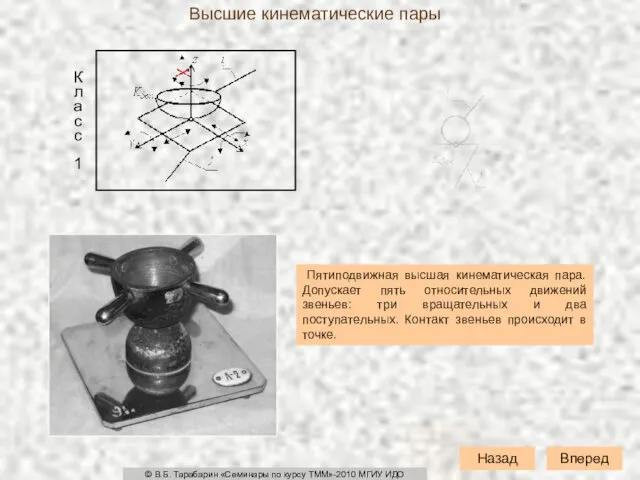
- 13. Высшие кинематические пары Пятиподвижная высшая кинематическая пара. Допускает пять относительных движений звеньев: три вращательных и два
- 14. Высшая кинематическая пара с точечным контактом Вперед Назад © В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ
- 15. Способы замыкания кинематических пар Замыкание пары геометрическое (за счет формы контактирующих поверхностей). Замыкание пары силовое (за
- 16. Структура механизмов Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см.
- 17. Структура механизмов Геометрическая структура механизма полностью описывается заданием геометрической формы его элементов, их расположения, указания вида
- 18. Связь - ограничение, наложенное на перемещение тела по данной координате. Избыточные (пассивные) связи - такие связи
- 19. Основные структурные формулы. q - число избыточных связей в механизме; W0 - заданная или требуемая подвижность
- 20. Для решения задач синтеза и анализа сложных рычажных механизмов профессором Петербургского университета Ассуром Л.В. была предложена
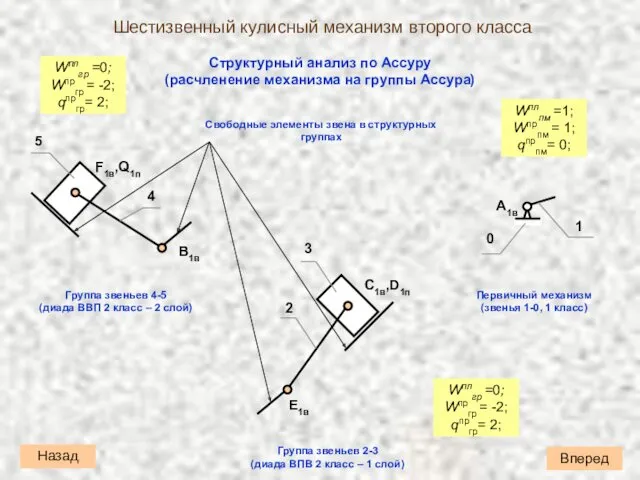
- 21. Первичные механизмы Под первичным механизмом понимают механизм, состоящий из двух звеньев (одно из которых неподвижное) образующих
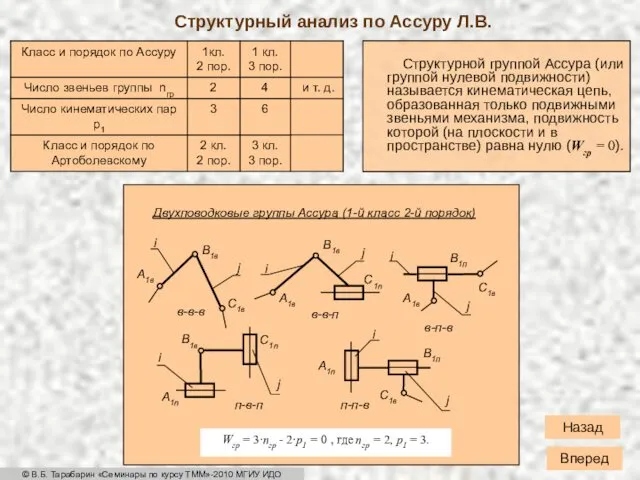
- 22. Структурный анализ по Ассуру Л.В. Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная
- 23. Шестизвенный механизм V-образного двигателя внутреннего сгорания Структурная схема Вперед Назад Параметры кинематических пар механизма Конструкция механизма
- 24. Структурный анализ Число звеньев механизма: общее k = 6, подвижных n = 5. Число кинематических пар:
- 25. Структурный анализ по Ассуру (расчленение механизма на группы Ассура) Вперед Назад Шестизвенный кулисный механизм второго класса
- 26. Структурный анализ по Ассуру (расчленение механизма на группы Ассура) Вперед Назад Шестизвенный кулисный механизм второго класса
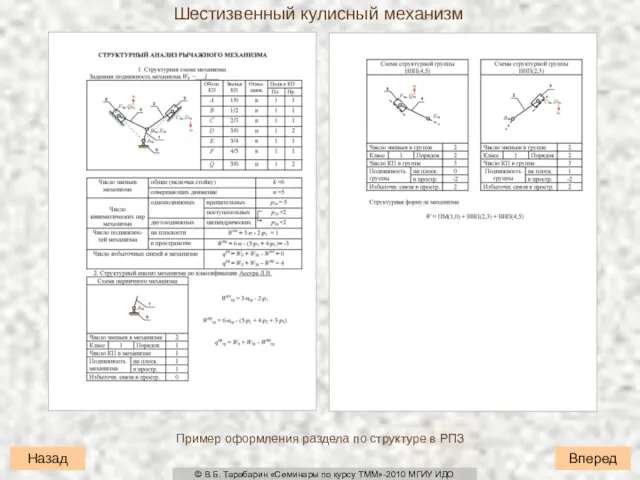
- 27. Вперед Назад Шестизвенный кулисный механизм Пример оформления раздела по структуре в РПЗ © В.Б. Тарабарин «Семинары
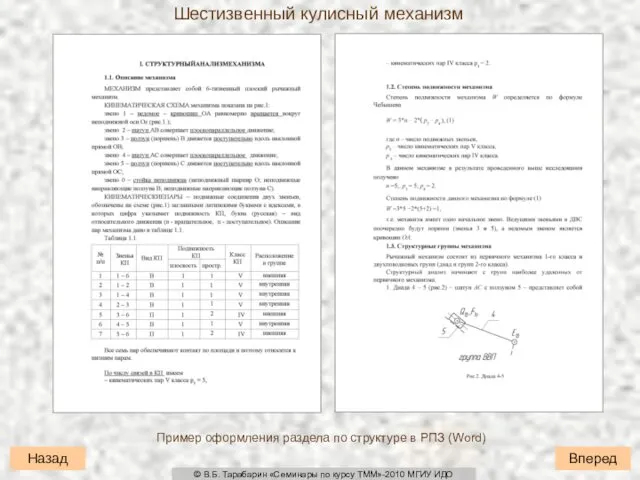
- 28. Вперед Назад Шестизвенный кулисный механизм Пример оформления раздела по структуре в РПЗ (Word) © В.Б. Тарабарин
- 29. Вперед Назад Шестизвенный кулисный механизм Пример оформления раздела по структуре в РПЗ (Word) © В.Б. Тарабарин
- 31. Скачать презентацию

Вперед
Введение.
Общие требования к разделу структуры
в курсовой работе по курсу
Вперед
Введение.
Общие требования к разделу структуры
в курсовой работе по курсу
Вперед
Исходные данные к первому ДЗ по Механике
Назад
© В.Б. Тарабарин «Семинары по
Вперед
Исходные данные к первому ДЗ по Механике
Назад
© В.Б. Тарабарин «Семинары по
Показать видеофрагмент
Вперед
Назад
Показать видеофрагмент
Вперед
Назад
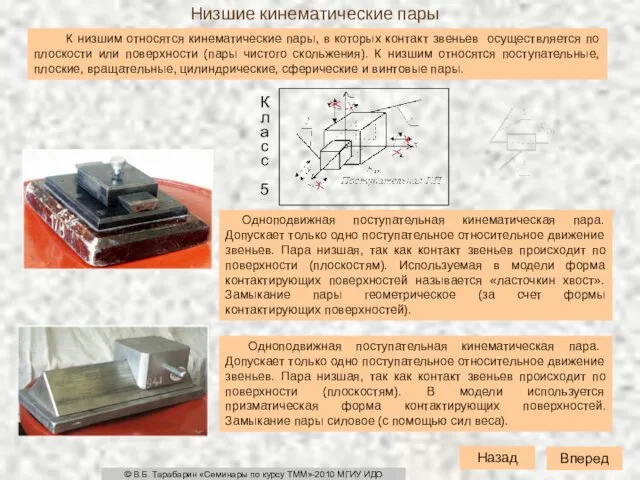
Низшие кинематические пары
К низшим относятся кинематические пары, в которых контакт звеньев
Низшие кинематические пары
К низшим относятся кинематические пары, в которых контакт звеньев
Поступательная кинематическая пара
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Поступательная кинематическая пара
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ ИДО
Одноподвижная вращательная кинематическая пара. Допускает только одно вращательное относительное движение
Одноподвижная вращательная кинематическая пара. Допускает только одно вращательное относительное движение
Низшие кинематические пары
Трехподвижная сферическая кинематическая пара. Допускает три вращательных относительных
Низшие кинематические пары
Трехподвижная сферическая кинематическая пара. Допускает три вращательных относительных
Низшая цилиндрическая кинематическая пара
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ
Низшая цилиндрическая кинематическая пара
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ
Низшая сферическая кинематическая пара
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ
Низшая сферическая кинематическая пара
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу ТММ»-2010 МГИУ

Высшие кинематические пары
К высшим относятся кинематические пары, в которых контакт
Высшие кинематические пары
К высшим относятся кинематические пары, в которых контакт
Высшая кинематическая пара с линейным контактом
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу
Высшая кинематическая пара с линейным контактом
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу
Высшие кинематические пары
Пятиподвижная высшая кинематическая пара. Допускает пять относительных движений
Высшие кинематические пары
Пятиподвижная высшая кинематическая пара. Допускает пять относительных движений
Высшая кинематическая пара с точечным контактом
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу
Высшая кинематическая пара с точечным контактом
Вперед
Назад
© В.Б. Тарабарин «Семинары по курсу
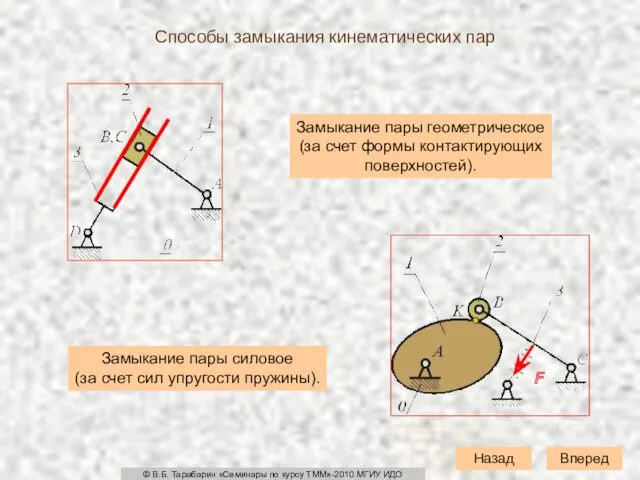
Способы замыкания кинематических пар
Замыкание пары геометрическое (за счет формы контактирующих поверхностей).
Замыкание
Способы замыкания кинематических пар
Замыкание пары геометрическое (за счет формы контактирующих поверхностей).
Замыкание

Структура механизмов
Структурная схема - графическое изображение механизма, выполненное с использованием условных
Структура механизмов
Структурная схема - графическое изображение механизма, выполненное с использованием условных
Структура механизмов
Геометрическая структура механизма полностью описывается заданием геометрической формы его
Структура механизмов
Геометрическая структура механизма полностью описывается заданием геометрической формы его
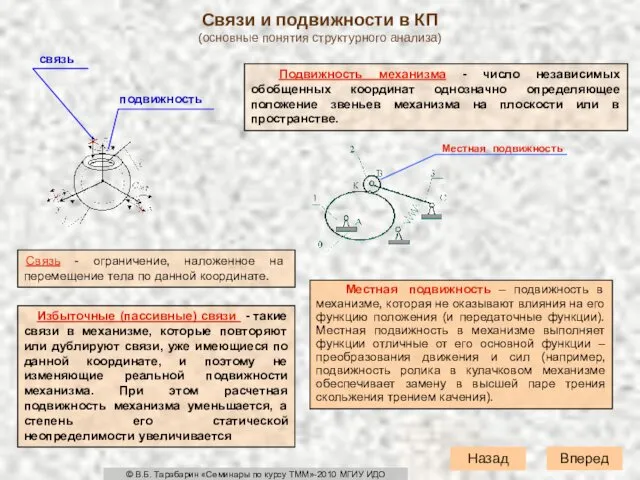
Связь - ограничение, наложенное на перемещение тела по данной координате.
Избыточные
Связь - ограничение, наложенное на перемещение тела по данной координате.
Избыточные
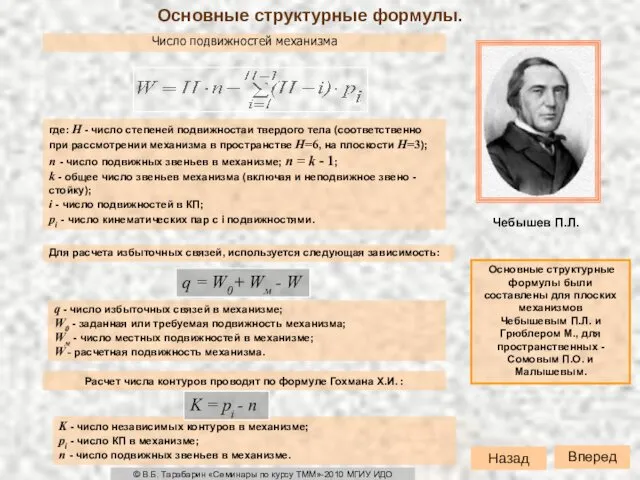
Основные структурные формулы.
q - число избыточных связей в механизме;
W0 - заданная
Основные структурные формулы.
q - число избыточных связей в механизме;
W0 - заданная
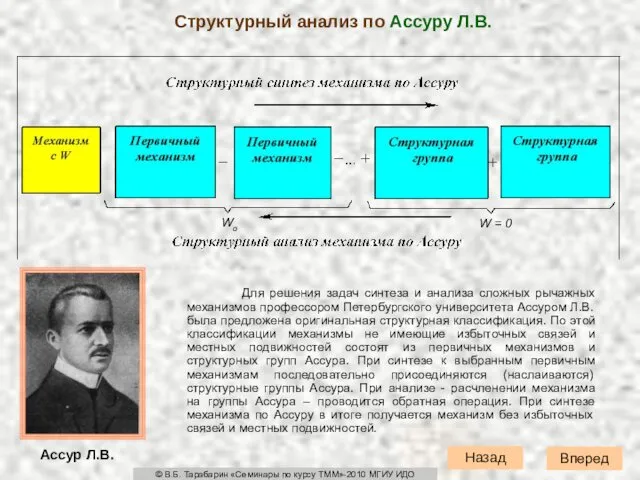
Для решения задач синтеза и анализа сложных рычажных механизмов профессором
Для решения задач синтеза и анализа сложных рычажных механизмов профессором

Первичные механизмы
Под первичным механизмом понимают механизм, состоящий из двух звеньев
Первичные механизмы
Под первичным механизмом понимают механизм, состоящий из двух звеньев
Структурный анализ по Ассуру Л.В.
Структурной группой Ассура (или группой
Структурный анализ по Ассуру Л.В.
Структурной группой Ассура (или группой
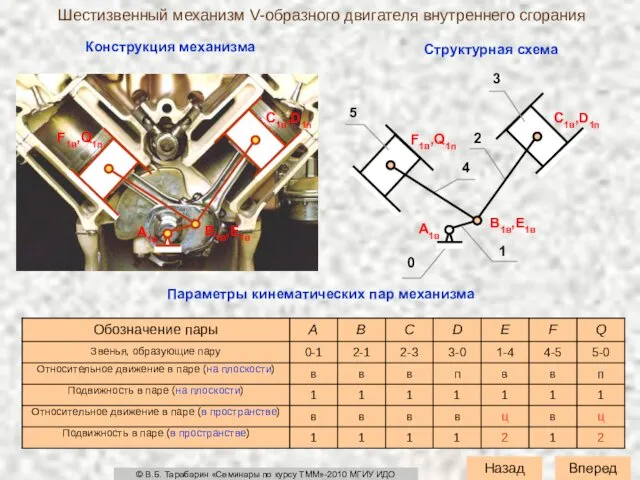
Шестизвенный механизм V-образного двигателя внутреннего сгорания
Структурная схема
Вперед
Назад
Параметры кинематических пар механизма
Конструкция
Шестизвенный механизм V-образного двигателя внутреннего сгорания
Структурная схема
Вперед
Назад
Параметры кинематических пар механизма
Конструкция
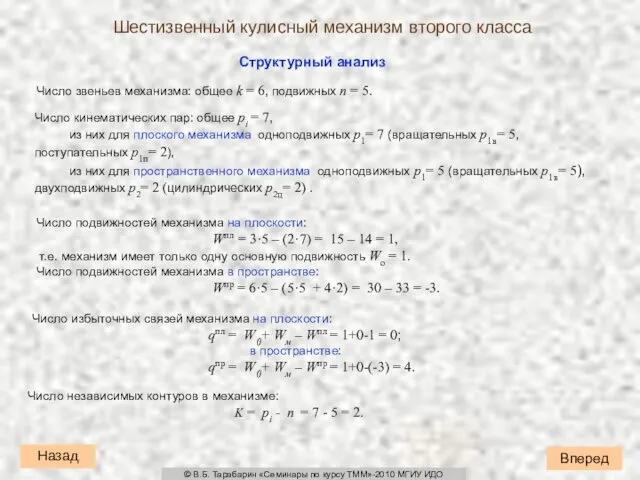
Структурный анализ
Число звеньев механизма: общее k = 6, подвижных n =
Структурный анализ
Число звеньев механизма: общее k = 6, подвижных n =
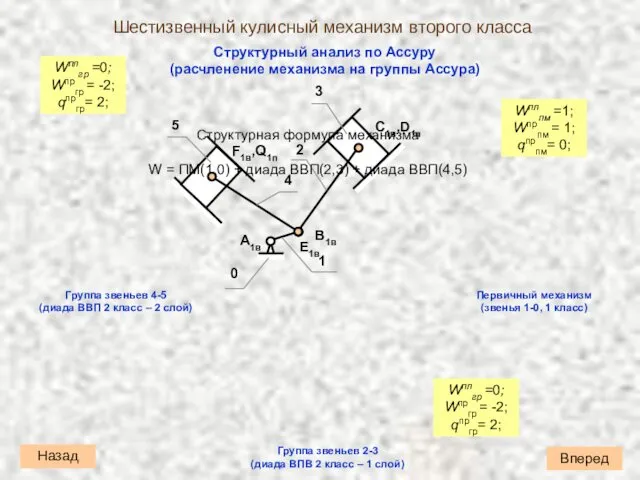
Структурный анализ по Ассуру
(расчленение механизма на группы Ассура)
Вперед
Назад
Шестизвенный кулисный механизм
Структурный анализ по Ассуру
(расчленение механизма на группы Ассура)
Вперед
Назад
Шестизвенный кулисный механизм
Структурный анализ по Ассуру
(расчленение механизма на группы Ассура)
Вперед
Назад
Шестизвенный кулисный механизм
Структурный анализ по Ассуру
(расчленение механизма на группы Ассура)
Вперед
Назад
Шестизвенный кулисный механизм
Вперед
Назад
Шестизвенный кулисный механизм
Пример оформления раздела по структуре в РПЗ
© В.Б.
Вперед
Назад
Шестизвенный кулисный механизм
Пример оформления раздела по структуре в РПЗ
© В.Б.
Вперед
Назад
Шестизвенный кулисный механизм
Пример оформления раздела по структуре в РПЗ (Word)
©
Вперед
Назад
Шестизвенный кулисный механизм
Пример оформления раздела по структуре в РПЗ (Word)
©
Вперед
Назад
Шестизвенный кулисный механизм
Пример оформления раздела по структуре в РПЗ (Word)
©
Вперед
Назад
Шестизвенный кулисный механизм
Пример оформления раздела по структуре в РПЗ (Word)
©
 Патология гемостаза
Патология гемостаза Человек познает мир
Человек познает мир Развитие конфликтной компетентности подростков
Развитие конфликтной компетентности подростков Европа в XIX веке
Европа в XIX веке Утверждение авторитарных и тоталитарных режимов в Италии и Испании
Утверждение авторитарных и тоталитарных режимов в Италии и Испании Доноведение 4 класс Мой крайпрезентация
Доноведение 4 класс Мой крайпрезентация Grammar A2+articles
Grammar A2+articles Электрические станции и подстанции. Главные схемы распределительных устройств электростанций и подстанций. (Лекция 3)
Электрические станции и подстанции. Главные схемы распределительных устройств электростанций и подстанций. (Лекция 3) Самый умный. Игра
Самый умный. Игра Что означают английские надписи на одежде
Что означают английские надписи на одежде Урок труда Волшебные нитки, иголки и пуговицы
Урок труда Волшебные нитки, иголки и пуговицы 01 .НТД. ГФ
01 .НТД. ГФ Фотоальбом. Для Алексея
Фотоальбом. Для Алексея Деление с остатком
Деление с остатком Производство окиси этилена окислением этилена кислородом
Производство окиси этилена окислением этилена кислородом Охранно - пожарная сигнализация. Виды сигнализаций
Охранно - пожарная сигнализация. Виды сигнализаций Создание программы
Создание программы Аудирование как средство совершенствования лексического навыка
Аудирование как средство совершенствования лексического навыка Тренажёр Табличное умножение
Тренажёр Табличное умножение Мой любимый детский сад. Экскурсия в медицинский кабинет
Мой любимый детский сад. Экскурсия в медицинский кабинет Состав языка C#. Тема 2
Состав языка C#. Тема 2 Христианин в труде. 4 класс
Христианин в труде. 4 класс Михаил Юрьевич Лермонтов
Михаил Юрьевич Лермонтов Организация процесса приготовления и разработка ассортимента изделий из пряничного теста
Организация процесса приготовления и разработка ассортимента изделий из пряничного теста OECD_RU
OECD_RU Новогодний праздник Святки для 3-4 классов
Новогодний праздник Святки для 3-4 классов Светлая Пасха. История и традиции
Светлая Пасха. История и традиции Энергосбережение – умное потребление
Энергосбережение – умное потребление