Технические решения и проектирование подсистем автоматического управления в ЭСБ различного функционального назначения (Часть 12) презентация
- Технические решения и проектирование подсистем автоматического управления в ЭСБ различного функционального назначения (Часть 12)

Содержание
- 2. Автоматизированная система диспетчерского управления пассажирским транспортом, включает в себя: 1) оборудование, устанавливаемое на транспортные средства и
- 3. оперативной связи водителя с диспетчерским центром; оперативного выявления нештатных ситуаций; двустороннего обмена короткими сообщениями водителя и
- 5. 2) специальное программное обеспечение диспетчерского центра организации движения и диспетчерских пунктов депо/парков, предназначенного для: повышения точности
- 7. 3) Табло, устанавливаемое на остановочных пунктах, и предназначенное для информационного обеспечения пассажиров.
- 8. Применение автоматики в автотранспорте Антиблокировочные системы (АБС) тормозов призваны обеспечить постоянный контроль за силой сцепления колес
- 9. Блок схема управления АБС
- 10. Появилось много разнообразных конструкций АБС, которые решают задачу автоматического регулирования тормозного момента. Независимо от конструкции, любая
- 11. Схема управления АБС 1 – исполнительный механизм; 2 – главный тормозной цилиндр; 3 – колесный тормозной
- 12. Разработано большое число принципов (алгоритмов функционирования), по которым работают АБС. Они различаются по сложности, стоимости реализации
- 13. Схемы установки АБС на автомобиле
- 14. Существуют более простые схемы АБС. На рисунке б показана схема АБС с регулируемым торможением двух задних
- 15. Еще более простая схема приведена на рисунке «в». Здесь используются один датчик угловой скорости, размещенный на
- 16. При двухфазовом цикле: первая фаза – нарастание давления вторая фаза – сброс давления При трехфазовом цикле:
- 17. Схема модулятора давления гидростатического тормозного привода
- 18. Замкнутый или закрытый (гидростатический) привод работает по принципу изменения объема тормозной системы в процессе торможения. Такой
- 19. Вторая фаза – сброс давления: блок управления подключает обмотку электромагнита 1 к источнику питания Якорь 3
- 20. Технические решения наземного транспорта Система регулирования светофоров– система, которая осуществляет регулирование светофоров на дорогах. Блок управления
- 21. Двухконтурный тормозной привод с АБС
- 22. 1 – колесный датчик угловой скорости; 2 – модуляторы; 3 – блоки управления; 4 – гидроаккумуляторы;
- 24. Скачать презентацию
Автоматизированная система диспетчерского управления пассажирским транспортом, включает в себя:
1) оборудование, устанавливаемое
Автоматизированная система диспетчерского управления пассажирским транспортом, включает в себя:
1) оборудование, устанавливаемое

оперативной связи водителя с диспетчерским центром;
оперативного выявления нештатных ситуаций;
двустороннего обмена короткими
оперативной связи водителя с диспетчерским центром;
оперативного выявления нештатных ситуаций;
двустороннего обмена короткими
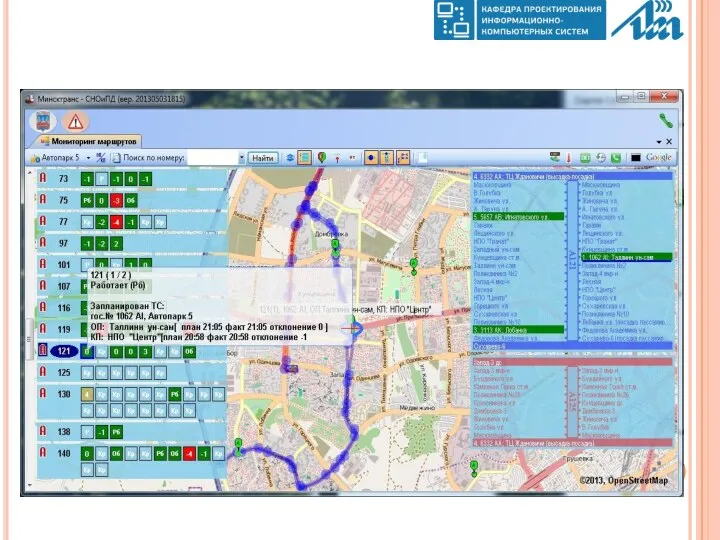
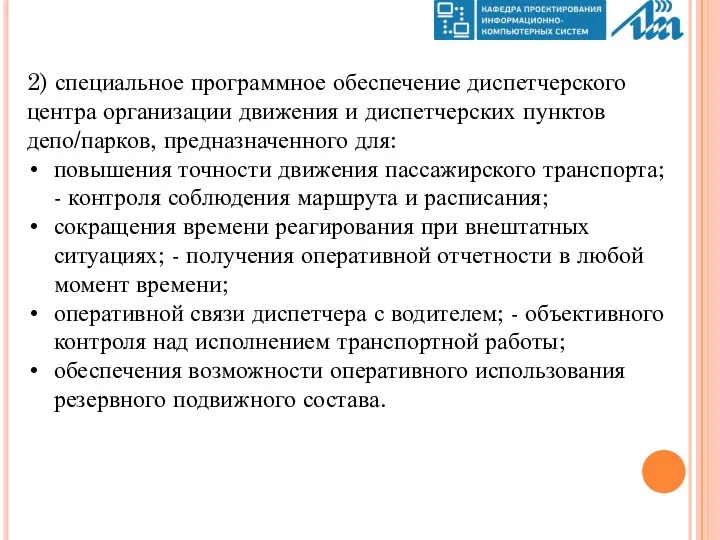
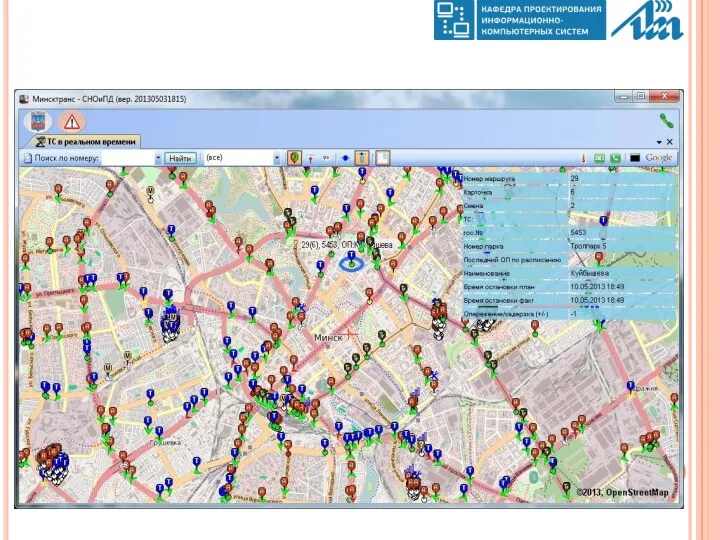
2) специальное программное обеспечение диспетчерского центра организации движения и диспетчерских пунктов
2) специальное программное обеспечение диспетчерского центра организации движения и диспетчерских пунктов
3) Табло, устанавливаемое на остановочных пунктах, и предназначенное для информационного обеспечения
3) Табло, устанавливаемое на остановочных пунктах, и предназначенное для информационного обеспечения
Применение автоматики в автотранспорте
Антиблокировочные системы (АБС) тормозов призваны обеспечить постоянный контроль за силой
Применение автоматики в автотранспорте
Антиблокировочные системы (АБС) тормозов призваны обеспечить постоянный контроль за силой

Блок схема управления АБС
Блок схема управления АБС
Появилось много разнообразных конструкций АБС, которые решают задачу автоматического регулирования тормозного
Появилось много разнообразных конструкций АБС, которые решают задачу автоматического регулирования тормозного
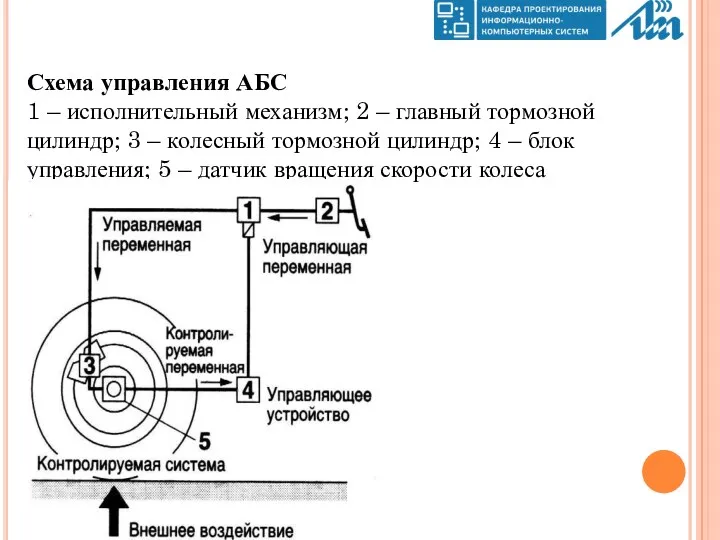
Схема управления АБС
1 – исполнительный механизм; 2 – главный тормозной цилиндр;
Схема управления АБС
1 – исполнительный механизм; 2 – главный тормозной цилиндр;
Разработано большое число принципов (алгоритмов функционирования), по которым работают АБС. Они различаются по
Разработано большое число принципов (алгоритмов функционирования), по которым работают АБС. Они различаются по
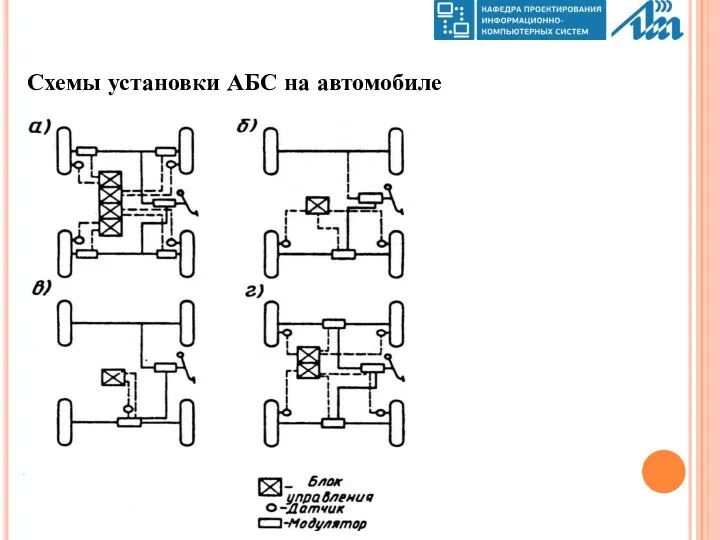
Схемы установки АБС на автомобиле
Схемы установки АБС на автомобиле
Существуют более простые схемы АБС. На рисунке б показана схема АБС
Существуют более простые схемы АБС. На рисунке б показана схема АБС
Еще более простая схема приведена на рисунке «в». Здесь используются один
Еще более простая схема приведена на рисунке «в». Здесь используются один
При двухфазовом цикле:
первая фаза – нарастание давления
вторая фаза – сброс давления
При
При двухфазовом цикле:
первая фаза – нарастание давления
вторая фаза – сброс давления
При
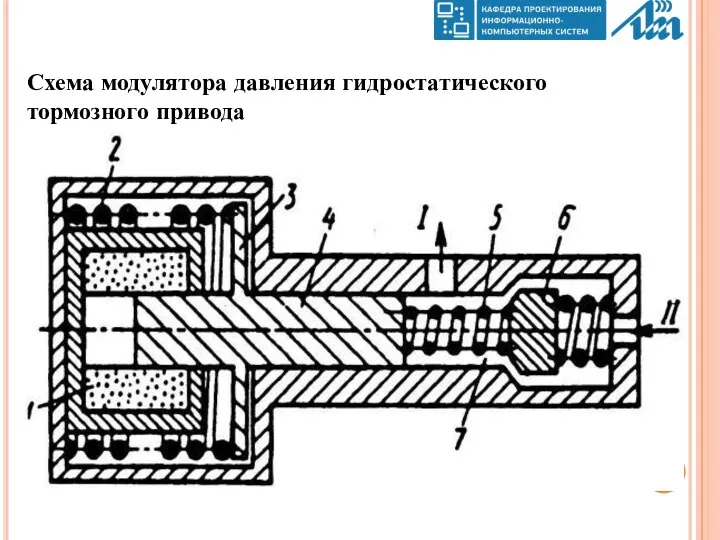
Схема модулятора давления гидростатического тормозного привода
Схема модулятора давления гидростатического тормозного привода
Замкнутый или закрытый (гидростатический) привод работает по принципу изменения объема тормозной
Замкнутый или закрытый (гидростатический) привод работает по принципу изменения объема тормозной
Вторая фаза – сброс давления: блок управления подключает обмотку электромагнита 1
Вторая фаза – сброс давления: блок управления подключает обмотку электромагнита 1
Технические решения наземного транспорта
Система регулирования светофоров– система, которая осуществляет регулирование светофоров
Технические решения наземного транспорта
Система регулирования светофоров– система, которая осуществляет регулирование светофоров

Двухконтурный тормозной привод с АБС
Двухконтурный тормозной привод с АБС
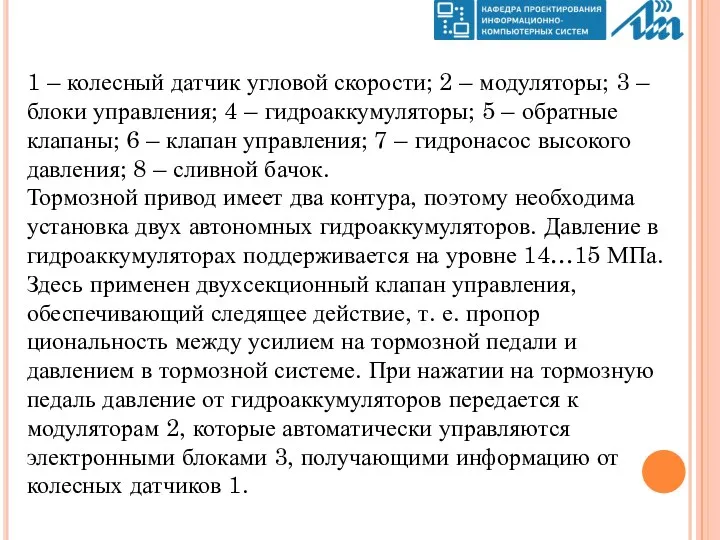
1 – колесный датчик угловой скорости; 2 – модуляторы; 3 –
1 – колесный датчик угловой скорости; 2 – модуляторы; 3 –
 № 3Герои в нашей семье - копия
№ 3Герои в нашей семье - копия Взаимодействие с семьей по формированию трудовых навыков у детей у дошкольников
Взаимодействие с семьей по формированию трудовых навыков у детей у дошкольников 1769 год - первые бумажные деньги в России. Ассигнационный рубль
1769 год - первые бумажные деньги в России. Ассигнационный рубль Электронные таблицы
Электронные таблицы Можно ли есть снег. Проект
Можно ли есть снег. Проект Права и обязанности граждан в области гражданской обороны и защиты от чрезвычайных ситуаций природного и техногенного характера
Права и обязанности граждан в области гражданской обороны и защиты от чрезвычайных ситуаций природного и техногенного характера Экономика: наука и хозяйство
Экономика: наука и хозяйство Механические свойства металлов и сплавов
Механические свойства металлов и сплавов Становление советской власти. 1918-1920 годы
Становление советской власти. 1918-1920 годы Деревянное панельное домостроение. Состояние и перспективы развития
Деревянное панельное домостроение. Состояние и перспективы развития Предложения по организации диаметрального движения в Московском транспортном узле в увязке с существующим радиальным движением
Предложения по организации диаметрального движения в Московском транспортном узле в увязке с существующим радиальным движением Закон и власть
Закон и власть Салон Анны Павловны Шерер. Л. Н. Толстой Война и мир
Салон Анны Павловны Шерер. Л. Н. Толстой Война и мир Сюжетно-ролевая игра В магазине
Сюжетно-ролевая игра В магазине Мастер класс Лабораторный практикум по теме: Организация деятельностного подхода в обучении 4 часть
Мастер класс Лабораторный практикум по теме: Организация деятельностного подхода в обучении 4 часть Основные понятия, термины и определения механики грунтов
Основные понятия, термины и определения механики грунтов презентация игры прабабушек
презентация игры прабабушек Созылмалы холецистит. Дискинезиясы
Созылмалы холецистит. Дискинезиясы Олимпийский урок.Сочи - 2014.1Б класс
Олимпийский урок.Сочи - 2014.1Б класс великобритания Диск
великобритания Диск Фитотерапия. Предмет, задачи история развития фармакогнозии. Основные понятия
Фитотерапия. Предмет, задачи история развития фармакогнозии. Основные понятия Күйістілердің эуритремозын балау, емдеу және алдын алу шаралары
Күйістілердің эуритремозын балау, емдеу және алдын алу шаралары Путешествие по Юрге
Путешествие по Юрге Скифская культура
Скифская культура Шаблон презентации В нотке - целый мир!
Шаблон презентации В нотке - целый мир! Правила дорожного движения
Правила дорожного движения Презентация по теме Работа со слабуспевающими детьми в начальных классах
Презентация по теме Работа со слабуспевающими детьми в начальных классах Бытовые электронагревательные приборы
Бытовые электронагревательные приборы