- Теория и техника радиолокации и радионавигации

Содержание
- 2. Классификация радиосистем Радиосистемы – информационно-управляющие системы, использующие для выполнения своих функций радиосигналы. Радиосигнал – электромагнитная волна,
- 3. Основные определения Радиолокационная система – совокупность технических средств, использующих радиоволну для решения следующих задач: обнаружение; определение
- 4. Активная с пассивным ответом Полуактивная Пассивная Пеленгация, аналог неавтономной РНС Активная с активным ответом (фактически это
- 5. Классификация радионавигационных систем Неавтономная РНС (аналог пассивной РЛС), пеленгация Радионавигационная точка (РНТ) – пункт с известными
- 6. Физические основы радиолокации Физической основой РЛ является рассеяние (отражение) радиоволн при облучении объектов, отличающихся своими электрическими
- 7. Объекты радиолокационного наблюдения Объекты РЛ-наблюдения (радиолокационные цели): летательные аппараты (самолеты, вертолеты, БПЛА и др.), гидрометеообразования (дождь,
- 8. Техническая реализация РЛС Цель (объект) РЛС Прд Прм Обн Антенна радиопередатчика излучает радиоволну в направлении цели.
- 9. Факторы, определяющие выбор длины волны в РЛС Желательно обеспечить отсутствие зависимости мощности вторичного излучения от длины
- 10. Частотные диапазоны РЛС американского стандарта IEEE
- 11. Какую информацию несет радиосигнал, отраженный от цели? Наличие отраженного сигнала определяет наличие цели; Задержка отраженного сигнала
- 12. Какой радиосигнал следует излучить: непрерывный или импульсный? непрерывный (обязательно модулированный), например: − ЛЧМ-сигнал t Tп Tп
- 13. − АМ-сигнал t Tп Tп t tзад φПРМ φПРД (φПРД − φПРМ ) ~ D фаза
- 14. Преимущества непрерывного метода РЛ: Простота реализации – исторически реализован первым; Сравнительно узкий спектр излучения (нет проблемы
- 15. импульсный τи τи t u(t) u(t) = A0 sin 2πf0t, −τи/2 t Tп Интервал времени ожидания
- 16. Преимущества импульсного метода РЛ: можно использовать совмещенную антенну на передачу и прием; большая мощность в импульсе.
- 17. Физические основы радионавигации Основная цель радионавигации – получение на борту подвижного объекта информации о его местоположении
- 18. Выбор частотного диапазона в задачах радионавигации В неавтономных РНС отсутствует требование l >> λ, таким образом
- 19. Показатели качества РЛ-систем РЛС – средство измерения дальности, углового положения, скорости и т.д. объекта. Показатели качества:
- 20. Показатели качества РН-систем РНС – средство измерения координат объекта-носителя (углового положения, высоты). Показатели качества: диапазон измерения;
- 21. История развития радиолокации 1897 г. − А.С. Попов во время опытов по радиосвязи на Балтийском море,
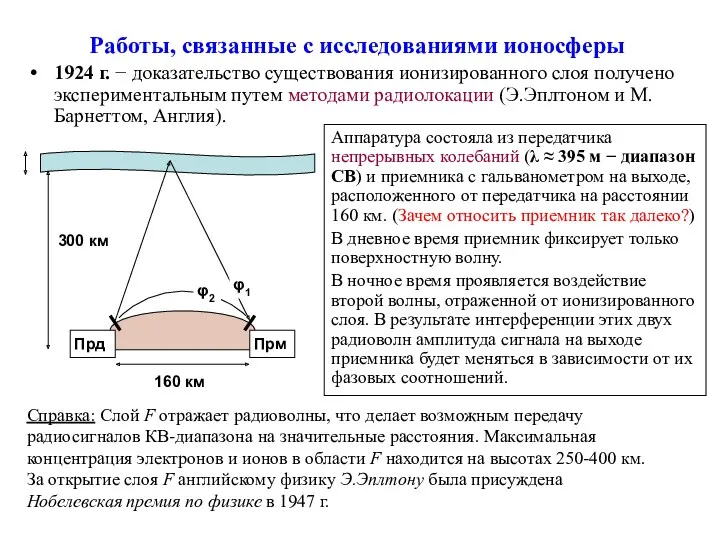
- 22. Работы, связанные с исследованиями ионосферы 1924 г. − доказательство существования ионизированного слоя получено экспериментальным путем методами
- 23. Задача определения высоты полета самолета альтиметр Ю. Бентли (патент США 1928 г.). Метод основан на излучении
- 24. Развитие науки всегда связано с наличием практической проблемы и необходимостью ее решения. Основная практическая потребность, приведшая
- 25. Структура первых РЛС была заимствована из опыта ионосферных исследований: непрерывное радиоизлучение; метровый диапазон волн; обнаружение отражающих
- 26. Начало работ по радиообнаружению самолетов в СССР (инициатор - Управление ПВО) 1939 г. − проведена серия
- 27. 1935 г. − начало работ по заказу Управления ПВО в Ленинградском ФТИ по освоению импульсной техники
- 28. 1940 г. ─ изготовлено два опытных образца РЛС «Редут» (λ = 4 м, Р= 50 кВт
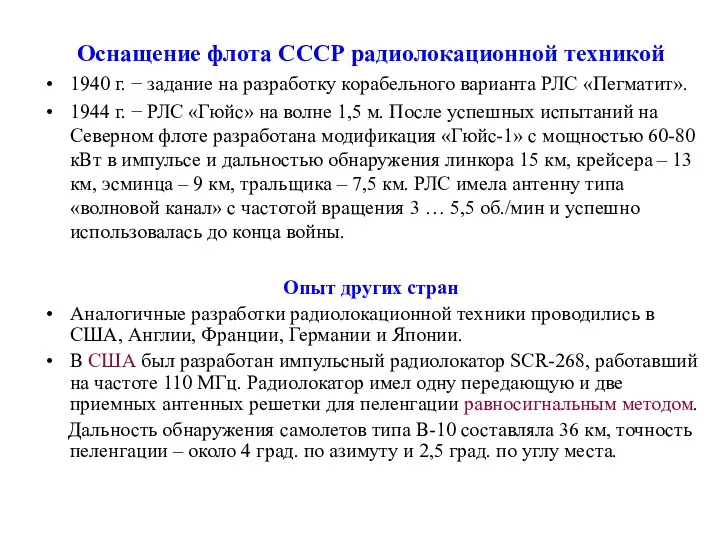
- 29. Оснащение флота СССР радиолокационной техникой 1940 г. − задание на разработку корабельного варианта РЛС «Пегматит». 1944
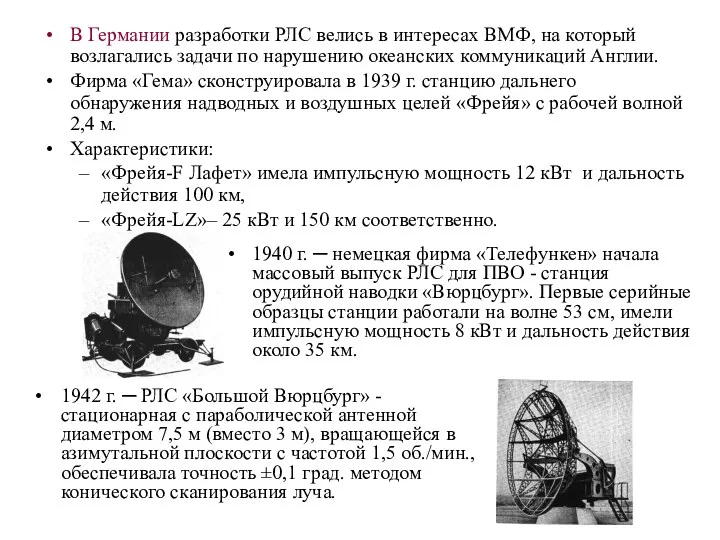
- 30. 1940 г. ─ немецкая фирма «Телефункен» начала массовый выпуск РЛС для ПВО - станция орудийной наводки
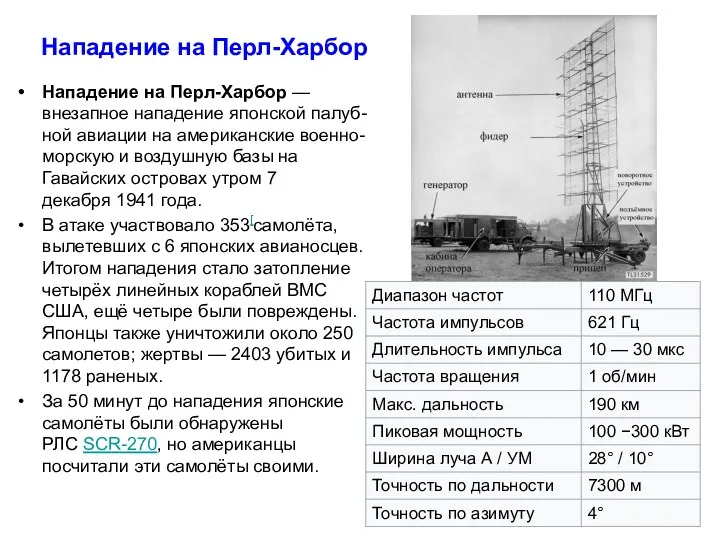
- 31. Нападение на Перл-Харбор Нападение на Перл-Харбор —внезапное нападение японской палуб-ной авиации на американские военно-морскую и воздушную
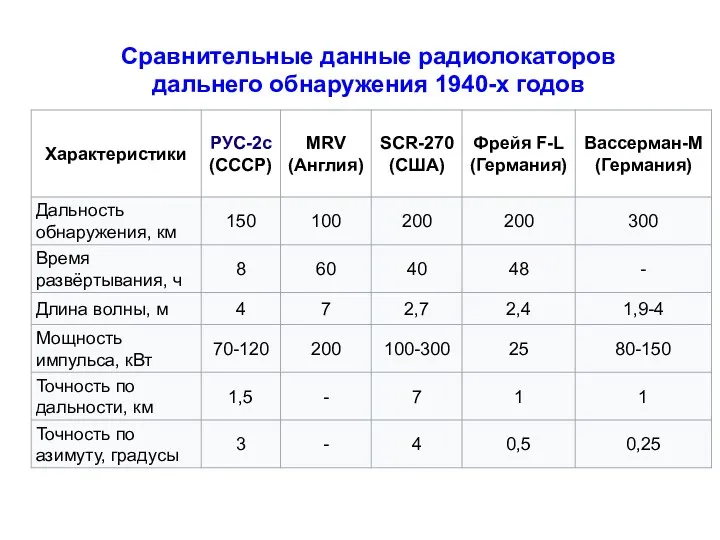
- 32. Сравнительные данные радиолокаторов дальнего обнаружения 1940-х годов
- 33. Направления развития РЛ после Второй мировой войны Применение РЛС как в военных так и в гражданских
- 34. История развития радионавигации Первые идеи по использованию радиоволн для ориентации кораблей были высказаны А.С. Поповым. 1905-1907
- 35. 1910-1914 гг. ─ в России, Франции, США создаются первые корабельные радиопеленгаторы с поворотными рамками и слуховой
- 36. После Первой мировой войны задачи радионавигации расширились в связи с развитием авиации. После 1918 г. по
- 37. Наземные радиопеленгаторы не получили значительного применения из-за прогресса в технологии и конструировании бортовой радиоаппаратуры и перспектив
- 38. Применение радиоуказателей курса («магнитный компас») − так называемые индикаторы типа «лево-нуль-право». Они позволяли с борта определять
- 39. В авиации и на флоте существует необходимость определения координат с высокой точностью. К 1930 г. стало
- 40. В амплитудных пеленгаторах ошибки в основном зависели от ширины диаграммы направленности. Погрешность амплитудных пеленгаторов при антеннах
- 41. Значительно более перспективным оказалось использование фазовых принципов, основанных на измерениях разностей фаз радиоволн, принятых от нескольких
- 43. Скачать презентацию

Классификация радиосистем
Радиосистемы – информационно-управляющие системы, использующие для выполнения своих функций радиосигналы.
Радиосигнал
Классификация радиосистем
Радиосистемы – информационно-управляющие системы, использующие для выполнения своих функций радиосигналы.
Радиосигнал
Основные определения
Радиолокационная система – совокупность технических средств, использующих радиоволну для решения
Основные определения
Радиолокационная система – совокупность технических средств, использующих радиоволну для решения

Активная с пассивным ответом
Полуактивная
Пассивная
Пеленгация, аналог неавтономной РНС
Активная с активным ответом
(фактически
Активная с пассивным ответом
Полуактивная
Пассивная
Пеленгация, аналог неавтономной РНС
Активная с активным ответом (фактически
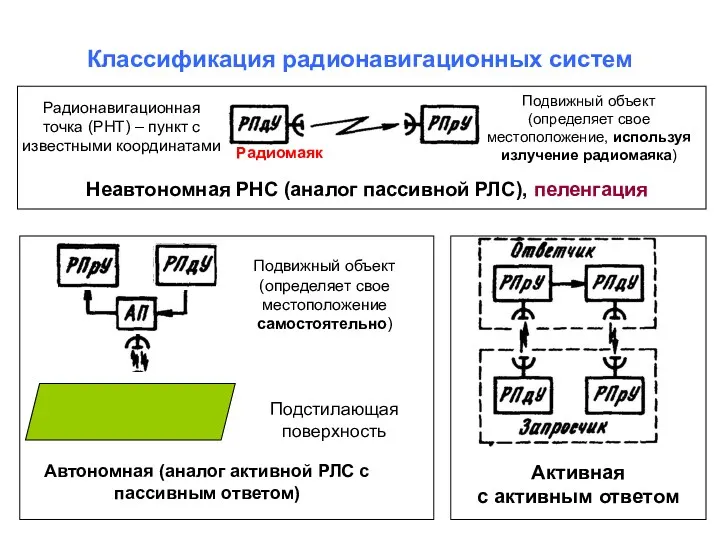
Классификация радионавигационных систем
Неавтономная РНС (аналог пассивной РЛС), пеленгация
Радионавигационная точка (РНТ) –
Классификация радионавигационных систем
Неавтономная РНС (аналог пассивной РЛС), пеленгация
Радионавигационная точка (РНТ) –
Физические основы радиолокации
Физической основой РЛ является рассеяние (отражение) радиоволн при облучении
Физические основы радиолокации
Физической основой РЛ является рассеяние (отражение) радиоволн при облучении
Объекты радиолокационного наблюдения
Объекты РЛ-наблюдения (радиолокационные цели):
летательные аппараты (самолеты, вертолеты, БПЛА
Объекты радиолокационного наблюдения
Объекты РЛ-наблюдения (радиолокационные цели):
летательные аппараты (самолеты, вертолеты, БПЛА
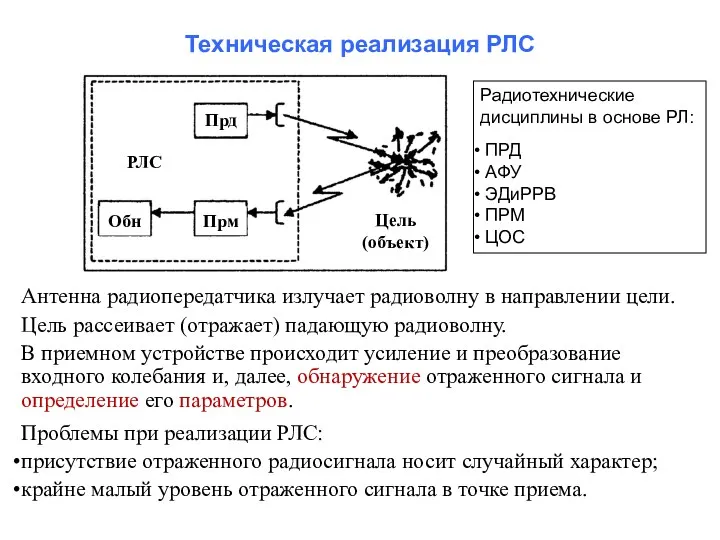
Техническая реализация РЛС
Цель (объект)
РЛС
Прд
Прм
Обн
Антенна радиопередатчика излучает радиоволну в направлении цели.
Цель рассеивает
Техническая реализация РЛС
Цель (объект)
РЛС
Прд
Прм
Обн
Антенна радиопередатчика излучает радиоволну в направлении цели.
Цель рассеивает
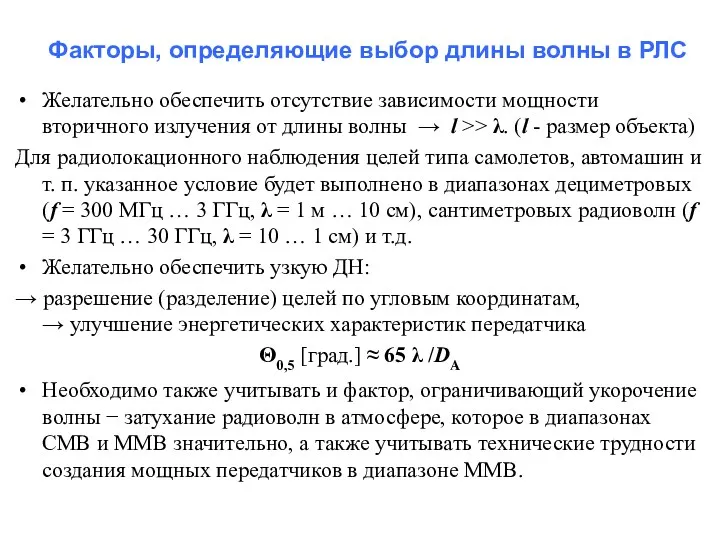
Факторы, определяющие выбор длины волны в РЛС
Желательно обеспечить отсутствие зависимости мощности
Факторы, определяющие выбор длины волны в РЛС
Желательно обеспечить отсутствие зависимости мощности

Частотные диапазоны РЛС американского стандарта IEEE
Частотные диапазоны РЛС американского стандарта IEEE
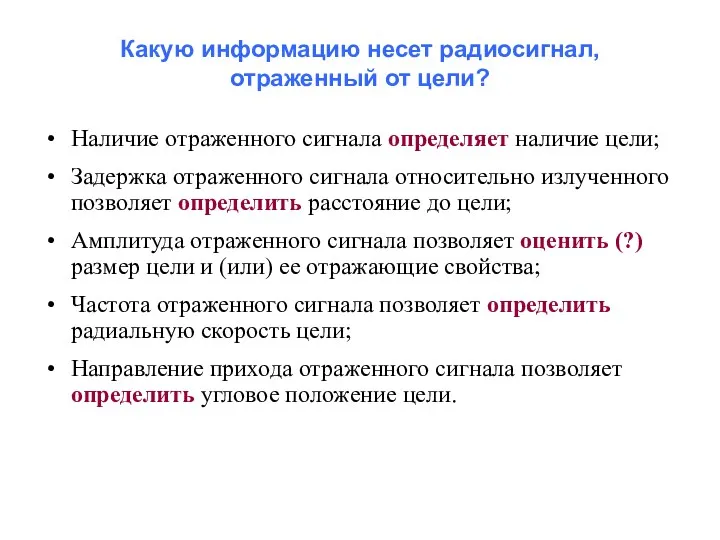
Какую информацию несет радиосигнал,
отраженный от цели?
Наличие отраженного сигнала определяет наличие
Какую информацию несет радиосигнал,
отраженный от цели?
Наличие отраженного сигнала определяет наличие
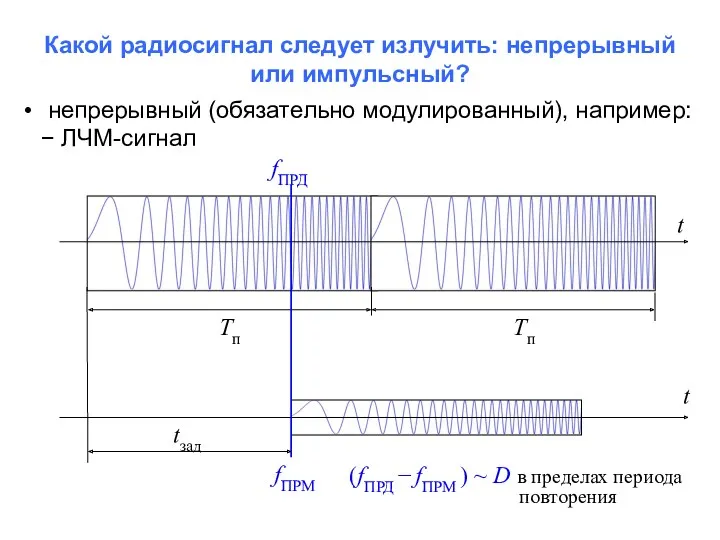
Какой радиосигнал следует излучить: непрерывный или импульсный?
непрерывный (обязательно модулированный), например:
−
Какой радиосигнал следует излучить: непрерывный или импульсный?
непрерывный (обязательно модулированный), например:
−
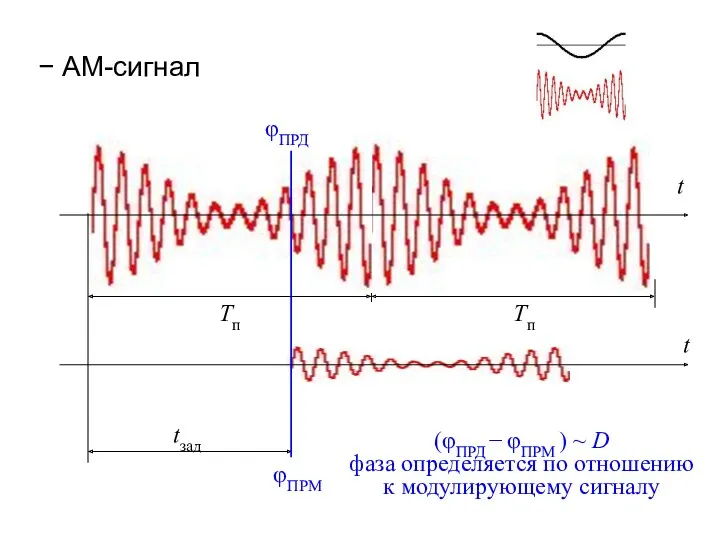
− АМ-сигнал
t
Tп
Tп
t
tзад
φПРМ
φПРД
(φПРД − φПРМ ) ~ D
фаза определяется по отношению
− АМ-сигнал
t
Tп
Tп
t
tзад
φПРМ
φПРД
(φПРД − φПРМ ) ~ D фаза определяется по отношению
Преимущества непрерывного метода РЛ:
Простота реализации – исторически реализован первым;
Сравнительно узкий спектр
Преимущества непрерывного метода РЛ:
Простота реализации – исторически реализован первым;
Сравнительно узкий спектр
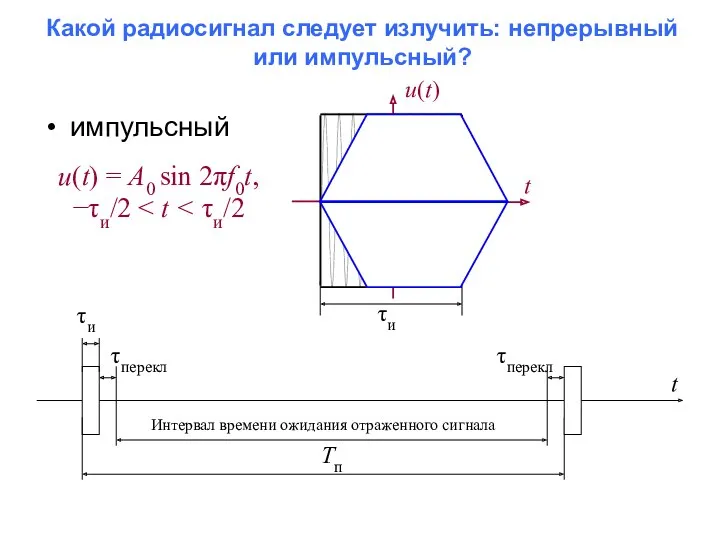
импульсный
τи
τи
t
u(t)
u(t) = A0 sin 2πf0t,
−τи/2 < t < τи/2
t
Tп
Интервал времени
импульсный
τи
τи
t
u(t)
u(t) = A0 sin 2πf0t,
−τи/2 < t < τи/2
t
Tп
Интервал времени
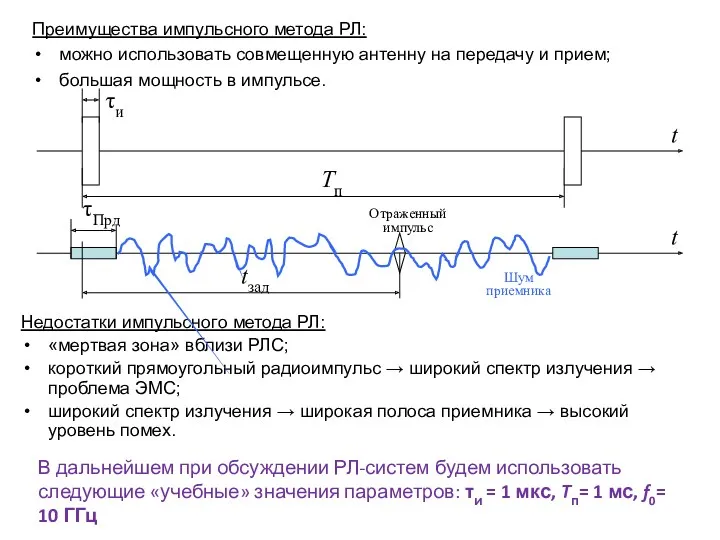
Преимущества импульсного метода РЛ:
можно использовать совмещенную антенну на передачу и прием;
большая
Преимущества импульсного метода РЛ:
можно использовать совмещенную антенну на передачу и прием;
большая
Физические основы радионавигации
Основная цель радионавигации – получение на борту подвижного объекта
Физические основы радионавигации
Основная цель радионавигации – получение на борту подвижного объекта
Выбор частотного диапазона в задачах радионавигации
В неавтономных РНС отсутствует требование l
Выбор частотного диапазона в задачах радионавигации
В неавтономных РНС отсутствует требование l
Показатели качества РЛ-систем
РЛС – средство измерения дальности, углового положения, скорости и
Показатели качества РЛ-систем
РЛС – средство измерения дальности, углового положения, скорости и
Показатели качества РН-систем
РНС – средство измерения координат объекта-носителя (углового положения, высоты).
Показатели
Показатели качества РН-систем
РНС – средство измерения координат объекта-носителя (углового положения, высоты).
Показатели
История развития радиолокации
1897 г. − А.С. Попов во время опытов по
История развития радиолокации
1897 г. − А.С. Попов во время опытов по
Работы, связанные с исследованиями ионосферы
1924 г. − доказательство существования ионизированного
Работы, связанные с исследованиями ионосферы
1924 г. − доказательство существования ионизированного
Задача определения высоты полета самолета
альтиметр Ю. Бентли (патент США 1928 г.).
Задача определения высоты полета самолета
альтиметр Ю. Бентли (патент США 1928 г.).
Развитие науки всегда связано с наличием практической проблемы и необходимостью ее
Развитие науки всегда связано с наличием практической проблемы и необходимостью ее
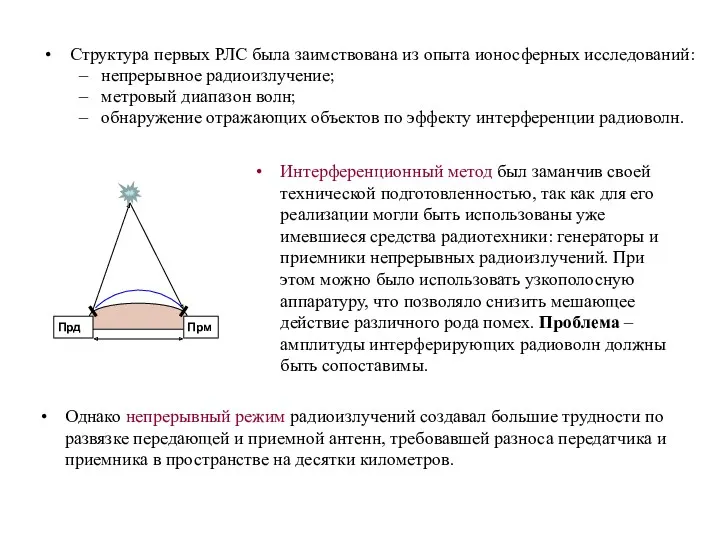
Структура первых РЛС была заимствована из опыта ионосферных исследований:
непрерывное радиоизлучение;
метровый
Структура первых РЛС была заимствована из опыта ионосферных исследований:
непрерывное радиоизлучение;
метровый
Начало работ по радиообнаружению самолетов в СССР
(инициатор - Управление
Начало работ по радиообнаружению самолетов в СССР (инициатор - Управление
1935 г. − начало работ по заказу Управления ПВО в Ленинградском
1935 г. − начало работ по заказу Управления ПВО в Ленинградском
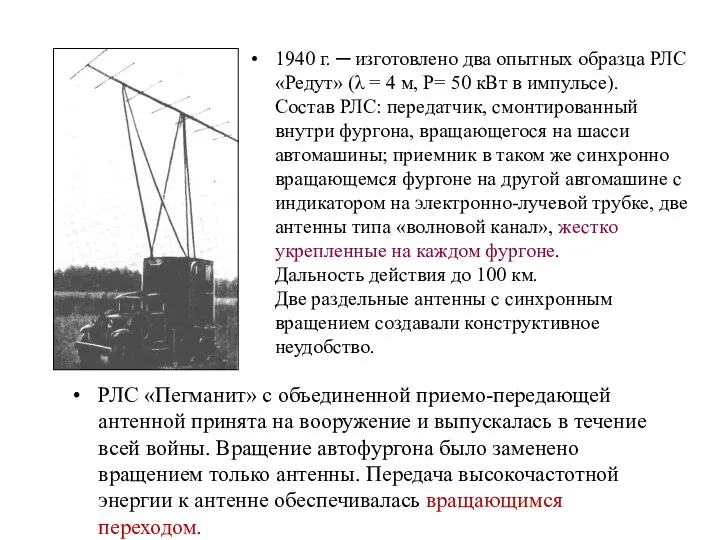
1940 г. ─ изготовлено два опытных образца РЛС «Редут» (λ =
1940 г. ─ изготовлено два опытных образца РЛС «Редут» (λ =
Оснащение флота СССР радиолокационной техникой
1940 г. − задание на разработку корабельного
Оснащение флота СССР радиолокационной техникой
1940 г. − задание на разработку корабельного
1940 г. ─ немецкая фирма «Телефункен» начала массовый выпуск РЛС для
1940 г. ─ немецкая фирма «Телефункен» начала массовый выпуск РЛС для
Нападение на Перл-Харбор
Нападение на Перл-Харбор —внезапное нападение японской палуб-ной авиации на американские военно-морскую и воздушную базы
Нападение на Перл-Харбор
Нападение на Перл-Харбор —внезапное нападение японской палуб-ной авиации на американские военно-морскую и воздушную базы
Сравнительные данные радиолокаторов дальнего обнаружения 1940-х годов
Сравнительные данные радиолокаторов дальнего обнаружения 1940-х годов
Направления развития РЛ после Второй мировой войны
Применение РЛС как в военных
Направления развития РЛ после Второй мировой войны
Применение РЛС как в военных
История развития радионавигации
Первые идеи по использованию радиоволн для ориентации кораблей были
История развития радионавигации
Первые идеи по использованию радиоволн для ориентации кораблей были
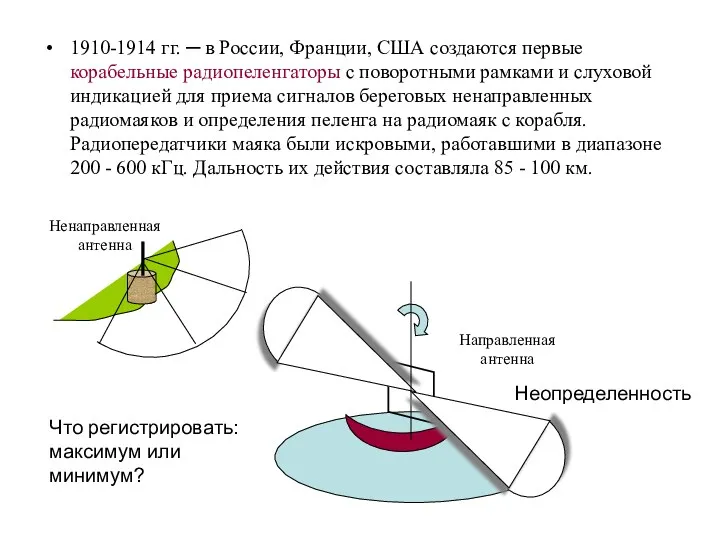
1910-1914 гг. ─ в России, Франции, США создаются первые корабельные радиопеленгаторы
1910-1914 гг. ─ в России, Франции, США создаются первые корабельные радиопеленгаторы
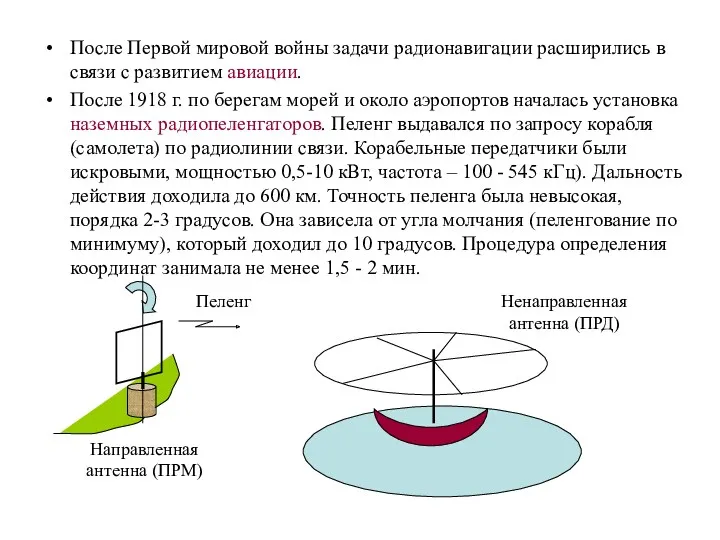
После Первой мировой войны задачи радионавигации расширились в связи с развитием
После Первой мировой войны задачи радионавигации расширились в связи с развитием
Наземные радиопеленгаторы не получили значительного применения из-за прогресса в технологии и
Наземные радиопеленгаторы не получили значительного применения из-за прогресса в технологии и
Применение радиоуказателей курса («магнитный компас») − так называемые индикаторы типа «лево-нуль-право».
Применение радиоуказателей курса («магнитный компас») − так называемые индикаторы типа «лево-нуль-право».
В авиации и на флоте существует необходимость определения координат с высокой
В авиации и на флоте существует необходимость определения координат с высокой
В амплитудных пеленгаторах ошибки в основном зависели от ширины диаграммы направленности.
В амплитудных пеленгаторах ошибки в основном зависели от ширины диаграммы направленности.
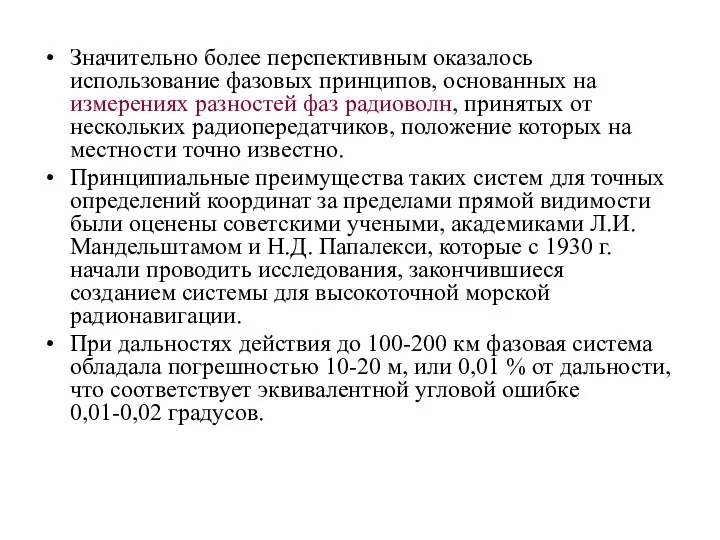
Значительно более перспективным оказалось использование фазовых принципов, основанных на измерениях разностей
Значительно более перспективным оказалось использование фазовых принципов, основанных на измерениях разностей
 СПИД и его профилактика
СПИД и его профилактика Исход
Исход Причины смены времени суток
Причины смены времени суток Перелетные птицы. Ознакомление детей с окружающим миром
Перелетные птицы. Ознакомление детей с окружающим миром Человек и общество (Модуль 1)
Человек и общество (Модуль 1) Порядок организации и осуществления подготовки различных групп населения в области гражданской обороны и защиты от ЧС
Порядок организации и осуществления подготовки различных групп населения в области гражданской обороны и защиты от ЧС Теория государства и права
Теория государства и права Список международных конференций на весенний семестр 2016 года
Список международных конференций на весенний семестр 2016 года Вред и польза интернета
Вред и польза интернета Типы и виды экономических систем
Типы и виды экономических систем Розрахунок трубопроводу при встановленому русі рідини
Розрахунок трубопроводу при встановленому русі рідини Постановка физического воспитания в вузах
Постановка физического воспитания в вузах Токарные станки
Токарные станки Здоровье и красота У-СИН
Здоровье и красота У-СИН Зарубежные информационные ресурсы
Зарубежные информационные ресурсы Современные электрофизиологические основы ЭКГ и различные системы съемок ЭКГ
Современные электрофизиологические основы ЭКГ и различные системы съемок ЭКГ Медиация будущего
Медиация будущего Динамика макроэкономического развития: цикличность и экономический рост
Динамика макроэкономического развития: цикличность и экономический рост Правила поведения на Новый год
Правила поведения на Новый год Интеллектуальный марафон - 20 (2 класс)
Интеллектуальный марафон - 20 (2 класс) Как возникла древнерусская письменность
Как возникла древнерусская письменность Особенности стратегического анализа: PEST анализ
Особенности стратегического анализа: PEST анализ презентация. классный час Что такое толерантность?
презентация. классный час Что такое толерантность? prezentatstia_sergeev_sergey_oput18
prezentatstia_sergeev_sergey_oput18 Классификация теплообменников
Классификация теплообменников Летние каникулы. Правила поведения
Летние каникулы. Правила поведения 1. Main differences between education systems in the United Kingdom and in the United States
1. Main differences between education systems in the United Kingdom and in the United States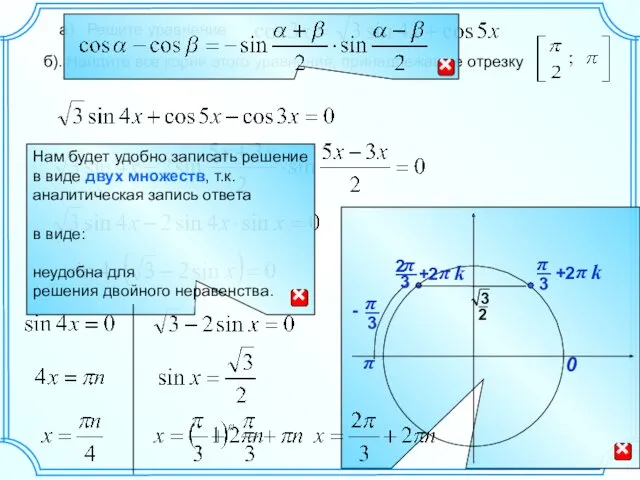 Решение тригонометрического уравнения (С 1, 25)
Решение тригонометрического уравнения (С 1, 25)