- Теория механизмов и машин. Основные задачи ТММ

Содержание
- 2. Теория механизмов и машин - это наука, изучающая структуру, кинематику и динамику механизмов и машин в
- 3. Основные задачи ТММ Изучение строения (структуры) механизма Определение положений механизмов и траекторий, описываемых отдельными точками Определение
- 4. Основные разделы курса ТММ структура механизмов и машин геометрия механизмов и их элементов кинематика механизмов динамика
- 5. Основные понятия и определения курса ТММ Машина - устройство, создаваемое человеком для преобразования энергии, материалов и
- 6. Классификация машин 1.Энергетические машины - преобразуют энергию одного вида в энергию другого вида.
- 7. Энергетические машины Двигатели преобразуют любой вид энергии в механическую Например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего
- 8. Классификация машин 2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и
- 9. Рабочие машины Транспортные машины - используют механическую энергию для изменения положения объекта (его координат). Технологические машины
- 10. Классификация машин 2. Информационные машины - машины предназначенные для обработки и преобразования информации. .
- 11. Информационные машины Математические машины - преобразуют входную информацию в математическую модель исследуемого объекта. Контрольно-управляющие машины -
- 12. 4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий
- 13. Кибернетические машины
- 14. Механизм - система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения
- 15. Классификация механизмов по конструктивным признакам 1. Рычажные механизмы
- 16. Рычажные механизмы
- 17. Рычажные механизмы
- 18. Рычажные механизмы
- 19. Рычажные механизмы
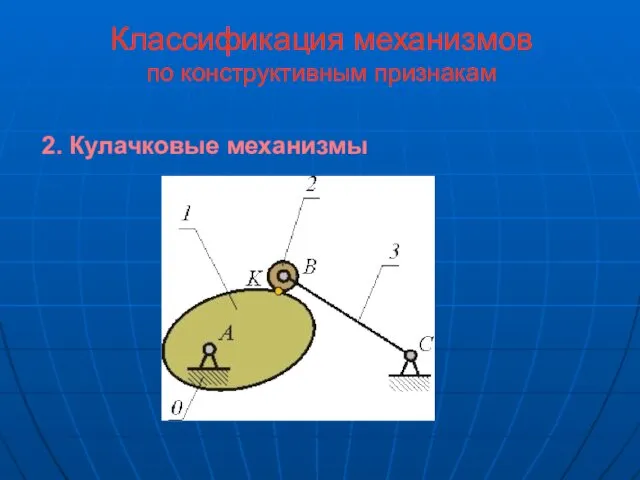
- 20. 2. Кулачковые механизмы Классификация механизмов по конструктивным признакам
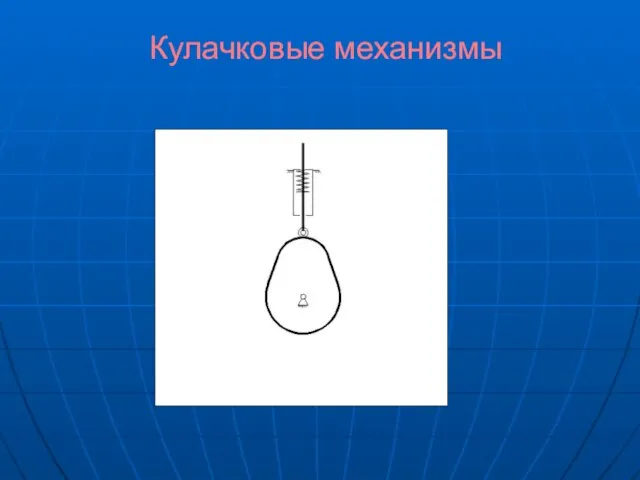
- 21. Кулачковые механизмы
- 22. Кулачковые механизмы
- 23. Классификация механизмов по конструктивным признакам 3. Зубчатые механизмы
- 24. Классификация механизмов по конструктивным признакам 4. Фрикционные механизмы
- 25. Классификация механизмов по конструктивным признакам 5. Гидравлические и пневматические механизмы
- 26. Классификация механизмов по конструктивным признакам 6. Механизмы с гибкими звеньями Цепная передача Ременная передача
- 27. Плоские У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. Классификация механизмов по
- 28. Машинный агрегат – совокупность взаимосвязанных механизмов Основные понятия и определения курса ТММ
- 29. Кулачковый механизм Рычажный механизм Зубчатый механизм Планетарный механизм Цепная передача Ременная передача Машинный агрегат
- 30. Звено - это одна или несколько деталей механизма, соединенных между собой жестко. Классификация звеньев 1.Неподвижное звено
- 31. В рычажных механизмах имеются следующие подвижные звенья: кривошип совершает полный оборот относительно стойки; коромысло совершает неполный
- 32. Механизм строгального станка
- 33. 1 2 3 4 5 6 6 6 1 - Кривошип 2 - Ползун 5 -
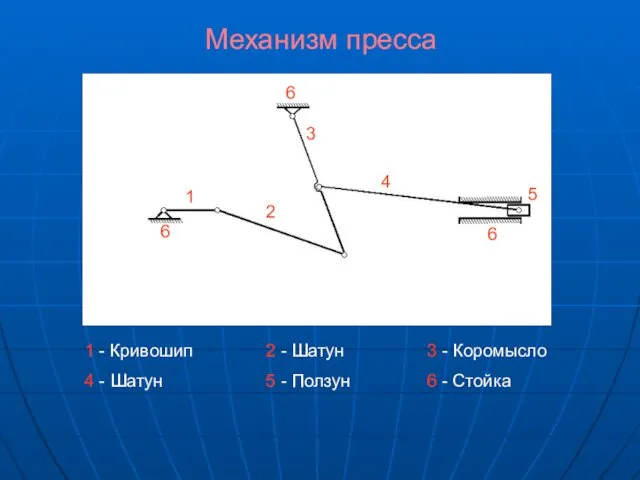
- 34. Механизм пресса
- 35. 6 6 6 1 2 3 4 5 1 - Кривошип 2 - Шатун 5 -
- 36. Кинематическая пара - это соединение двух звеньев, обеспечивающее перемещение одного звена относительно другого. Элементы механизма
- 37. 6-максимальное число степеней свободы твердого тела в пространстве (3 поступательных и 3 вращательных движения относительно осей
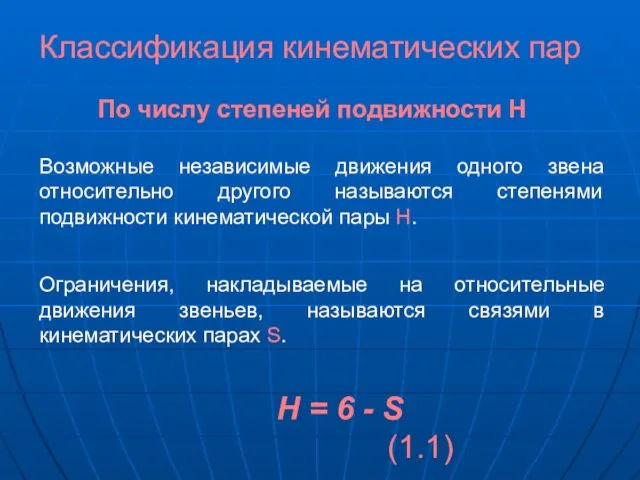
- 38. Классификация кинематических пар По числу степеней подвижности Н Возможные независимые движения одного звена относительно другого называются
- 39. Пятиподвижные кинематические пары Шар – плоскость (ВВВПП) H = 5 S = 1
- 40. Четырёхподвижные кинематические пары Цилиндр – плоскость (ВВПП) H = 4 S = 2
- 41. Трёхподвижные кинематические пары Сферическая (ВВВ) H = 3 S = 3
- 42. Трёхподвижные кинематические пары Плоскостная (ВПП) H = 3 S = 3
- 43. Двухподвижные кинематические пары Сферическая с пальцем (ВВ) H = 2 S = 4
- 44. Двухподвижные кинематические пары Цилиндрическая (ВП) H = 2 S = 4
- 45. Одноподвижные кинематические пары Поступательная (П) H = 1 S = 5
- 46. Одноподвижные кинематические пары Вращательная (В) H = 1 S = 5
- 47. Классификация кинематических пар По характеру соприкосновения звеньев Низшими кинематическими парами называются такие, в которых соприкосновение звеньев
- 48. Классификация кинематических пар По характеру соприкосновения звеньев Высшими называются такие кинематические пары, у которых соприкосновение звеньев
- 49. Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар. Элементы механизма
- 50. Классификация кинематических цепей Незамкнутые - это кинематические цепи, которые имеют звенья, входящие только в одну кинематическую
- 51. Примеры кинематических цепей Сложная незамкнутая кинематическая цепь Сложная замкнутая кинематическая цепь
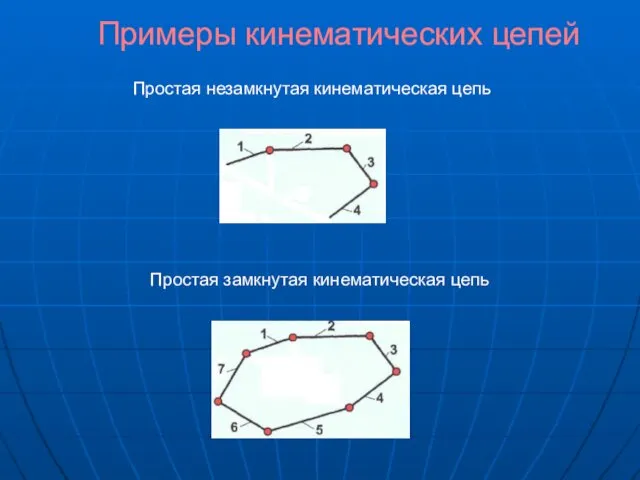
- 52. Примеры кинематических цепей Простая незамкнутая кинематическая цепь Простая замкнутая кинематическая цепь
- 54. Скачать презентацию
Теория механизмов и машин - это наука, изучающая структуру, кинематику и
Теория механизмов и машин - это наука, изучающая структуру, кинематику и
Основные задачи ТММ
Изучение строения (структуры) механизма
Определение положений механизмов и траекторий,
Основные задачи ТММ
Изучение строения (структуры) механизма
Определение положений механизмов и траекторий,
Основные разделы курса ТММ
структура механизмов и машин
геометрия механизмов и их элементов
кинематика
Основные разделы курса ТММ
структура механизмов и машин
геометрия механизмов и их элементов
кинематика
Основные понятия и определения курса ТММ
Машина - устройство, создаваемое человеком для
Основные понятия и определения курса ТММ
Машина - устройство, создаваемое человеком для

Классификация машин
1.Энергетические машины - преобразуют энергию одного вида в энергию другого
Классификация машин
1.Энергетические машины - преобразуют энергию одного вида в энергию другого
Энергетические машины
Двигатели преобразуют любой вид энергии в механическую
Например, электродвигатели
Энергетические машины
Двигатели преобразуют любой вид энергии в механическую
Например, электродвигатели

Классификация машин
2. Рабочие машины - машины использующие механическую энергию для совершения
Классификация машин
2. Рабочие машины - машины использующие механическую энергию для совершения
Рабочие машины
Транспортные машины - используют механическую энергию для изменения положения
Рабочие машины
Транспортные машины - используют механическую энергию для изменения положения

Классификация машин
2. Информационные машины - машины предназначенные для обработки и преобразования
Классификация машин
2. Информационные машины - машины предназначенные для обработки и преобразования
Информационные машины
Математические машины - преобразуют входную информацию в математическую модель
Информационные машины
Математические машины - преобразуют входную информацию в математическую модель
4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны
4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны

Кибернетические машины
Кибернетические машины
Механизм - система тел, предназначенная для преобразования движения одного или нескольких
Механизм - система тел, предназначенная для преобразования движения одного или нескольких

Классификация механизмов
по конструктивным признакам
1. Рычажные механизмы
Классификация механизмов
по конструктивным признакам
1. Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
Рычажные механизмы
2. Кулачковые механизмы
Классификация механизмов
по конструктивным признакам
2. Кулачковые механизмы
Классификация механизмов
по конструктивным признакам
Кулачковые механизмы
Кулачковые механизмы

Кулачковые механизмы
Кулачковые механизмы

Классификация механизмов
по конструктивным признакам
3. Зубчатые механизмы
Классификация механизмов
по конструктивным признакам
3. Зубчатые механизмы

Классификация механизмов
по конструктивным признакам
4. Фрикционные механизмы
Классификация механизмов
по конструктивным признакам
4. Фрикционные механизмы

Классификация механизмов
по конструктивным признакам
5. Гидравлические и пневматические механизмы
Классификация механизмов
по конструктивным признакам
5. Гидравлические и пневматические механизмы

Классификация механизмов
по конструктивным признакам
6. Механизмы с гибкими звеньями
Цепная передача
Ременная передача
Классификация механизмов
по конструктивным признакам
6. Механизмы с гибкими звеньями
Цепная передача
Ременная передача
Плоские
У плоского механизма точки его звеньев описывают траектории, лежащие в
Плоские
У плоского механизма точки его звеньев описывают траектории, лежащие в
Машинный агрегат – совокупность взаимосвязанных механизмов
Основные понятия и определения курса ТММ
Машинный агрегат – совокупность взаимосвязанных механизмов
Основные понятия и определения курса ТММ

Кулачковый механизм
Рычажный механизм
Зубчатый механизм
Планетарный механизм
Цепная
передача
Ременная
передача
Машинный агрегат
Кулачковый механизм
Рычажный механизм
Зубчатый механизм
Планетарный механизм
Цепная
передача
Ременная
передача
Машинный агрегат
Звено - это одна или несколько деталей механизма, соединенных между собой
Звено - это одна или несколько деталей механизма, соединенных между собой
В рычажных механизмах имеются следующие
подвижные звенья:
кривошип совершает полный оборот относительно
В рычажных механизмах имеются следующие
подвижные звенья:
кривошип совершает полный оборот относительно
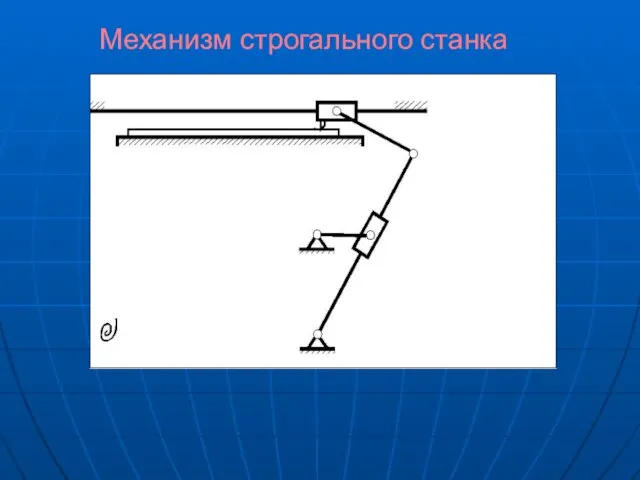
Механизм строгального станка
Механизм строгального станка

1
2
3
4
5
6
6
6
1 - Кривошип
2 - Ползун
5 - Ползун
4 - Шатун
3 - Кулиса
6
1
2
3
4
5
6
6
6
1 - Кривошип
2 - Ползун
5 - Ползун
4 - Шатун
3 - Кулиса
6
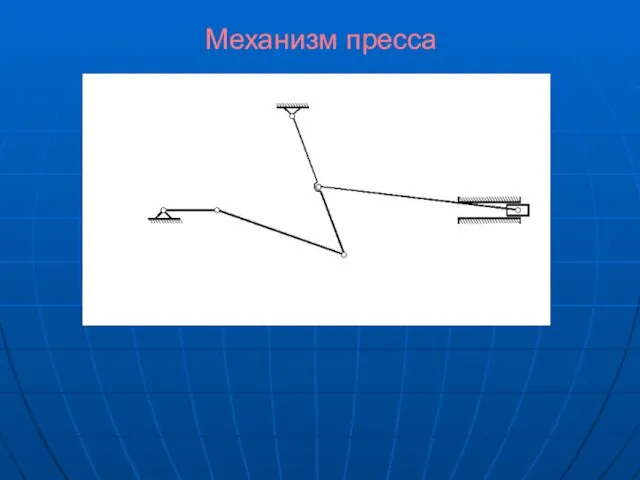
Механизм пресса
Механизм пресса
6
6
6
1
2
3
4
5
1 - Кривошип
2 - Шатун
5 - Ползун
4 - Шатун
3 - Коромысло
6
6
6
6
1
2
3
4
5
1 - Кривошип
2 - Шатун
5 - Ползун
4 - Шатун
3 - Коромысло
6
Кинематическая пара - это соединение двух звеньев, обеспечивающее перемещение одного звена
Кинематическая пара - это соединение двух звеньев, обеспечивающее перемещение одного звена
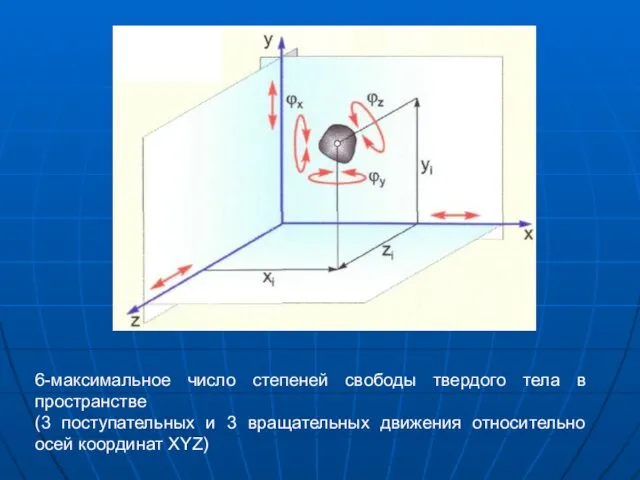
6-максимальное число степеней свободы твердого тела в пространстве
(3 поступательных и 3
6-максимальное число степеней свободы твердого тела в пространстве
(3 поступательных и 3
Классификация кинематических пар
По числу степеней подвижности Н
Возможные независимые движения одного звена
Классификация кинематических пар
По числу степеней подвижности Н
Возможные независимые движения одного звена

Пятиподвижные кинематические пары
Шар – плоскость (ВВВПП)
H = 5 S = 1
Пятиподвижные кинематические пары
Шар – плоскость (ВВВПП)
H = 5 S = 1
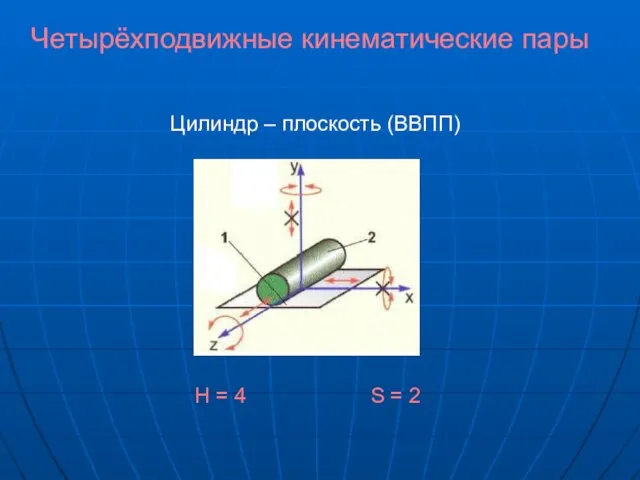
Четырёхподвижные кинематические пары
Цилиндр – плоскость (ВВПП)
H = 4 S = 2
Четырёхподвижные кинематические пары
Цилиндр – плоскость (ВВПП)
H = 4 S = 2

Трёхподвижные кинематические пары
Сферическая (ВВВ)
H = 3 S = 3
Трёхподвижные кинематические пары
Сферическая (ВВВ)
H = 3 S = 3
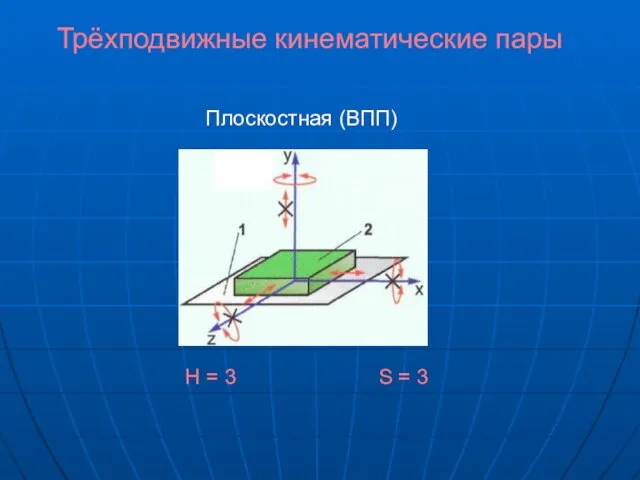
Трёхподвижные кинематические пары
Плоскостная (ВПП)
H = 3 S = 3
Трёхподвижные кинематические пары
Плоскостная (ВПП)
H = 3 S = 3
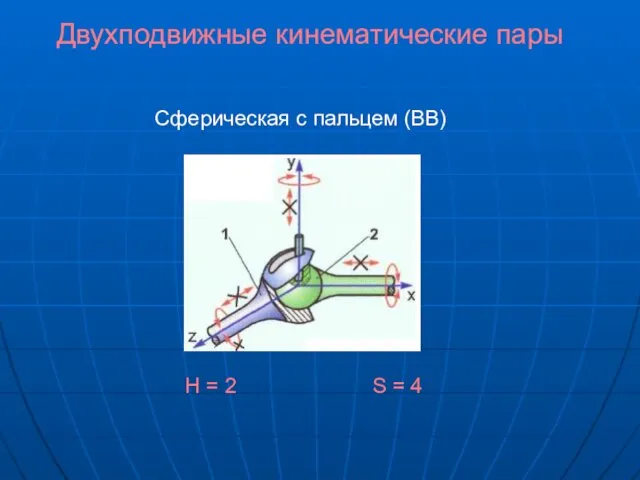
Двухподвижные кинематические пары
Сферическая с пальцем (ВВ)
H = 2 S = 4
Двухподвижные кинематические пары
Сферическая с пальцем (ВВ)
H = 2 S = 4

Двухподвижные кинематические пары
Цилиндрическая (ВП)
H = 2 S = 4
Двухподвижные кинематические пары
Цилиндрическая (ВП)
H = 2 S = 4

Одноподвижные кинематические пары
Поступательная (П)
H = 1 S = 5
Одноподвижные кинематические пары
Поступательная (П)
H = 1 S = 5
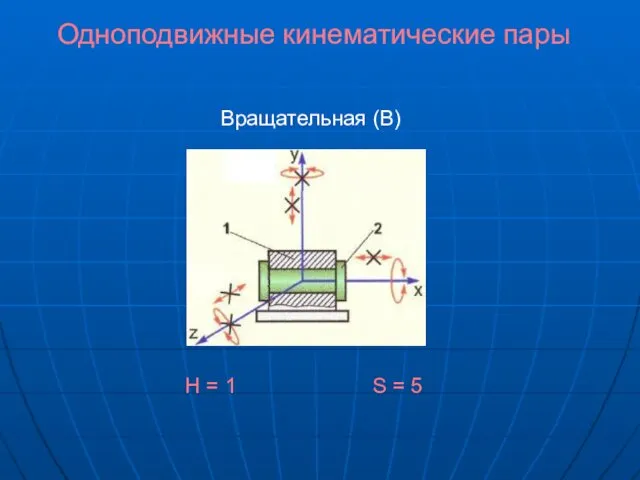
Одноподвижные кинематические пары
Вращательная (В)
H = 1 S = 5
Одноподвижные кинематические пары
Вращательная (В)
H = 1 S = 5

Классификация кинематических пар
По характеру соприкосновения звеньев
Низшими кинематическими парами называются такие,
Классификация кинематических пар
По характеру соприкосновения звеньев
Низшими кинематическими парами называются такие,

Классификация кинематических пар
По характеру соприкосновения звеньев
Высшими называются такие кинематические пары,
Классификация кинематических пар
По характеру соприкосновения звеньев
Высшими называются такие кинематические пары,
Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар.
Элементы
Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар.
Элементы
Классификация кинематических цепей
Незамкнутые - это кинематические цепи, которые имеют звенья,
Классификация кинематических цепей
Незамкнутые - это кинематические цепи, которые имеют звенья,
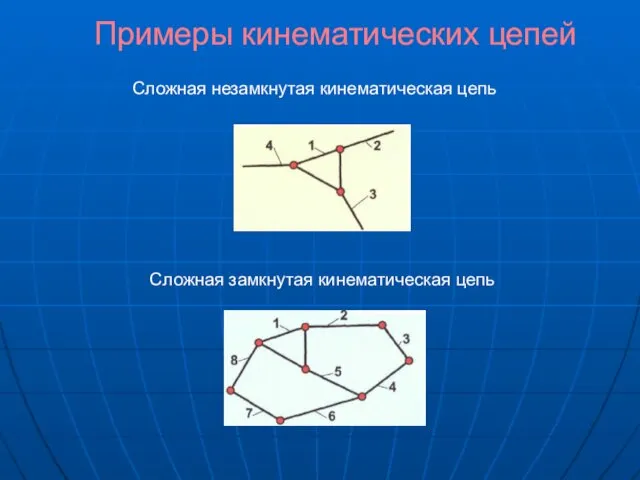
Примеры кинематических цепей
Сложная незамкнутая кинематическая цепь
Сложная замкнутая кинематическая цепь
Примеры кинематических цепей
Сложная незамкнутая кинематическая цепь
Сложная замкнутая кинематическая цепь
Примеры кинематических цепей
Простая незамкнутая кинематическая цепь
Простая замкнутая кинематическая цепь
Примеры кинематических цепей
Простая незамкнутая кинематическая цепь
Простая замкнутая кинематическая цепь
 Моделирование прямой юбки. Способы моделирования
Моделирование прямой юбки. Способы моделирования Угадай страну
Угадай страну Очистка газов фильтрованием. Преимущества и недостатки фильтров. (Лекция 6)
Очистка газов фильтрованием. Преимущества и недостатки фильтров. (Лекция 6) Командная работа
Командная работа Компания IBM
Компания IBM ИГРА – ПУТЕШЕСТВИЕ МОЯ ЖИЗНЬ - МОЙ ВЫБОР
ИГРА – ПУТЕШЕСТВИЕ МОЯ ЖИЗНЬ - МОЙ ВЫБОР Гипоспадия. Классификация
Гипоспадия. Классификация Занятие в ГПД Космические дали
Занятие в ГПД Космические дали Проект Подготовка учащихся основной школы к государственной итоговой аттестации в условиях реализации ФГОС основного общего образования.
Проект Подготовка учащихся основной школы к государственной итоговой аттестации в условиях реализации ФГОС основного общего образования. Использование игр В.В.Воскобовича в работе логопеда..
Использование игр В.В.Воскобовича в работе логопеда.. Видеоконтроллеры
Видеоконтроллеры Презентация к лекции для родителей Как помочь ребенку успешно сдать ЕГЭ/ГИА?
Презентация к лекции для родителей Как помочь ребенку успешно сдать ЕГЭ/ГИА? Введение в курс мирового искусства
Введение в курс мирового искусства Визитка класса
Визитка класса Святой Великомученик и Целитель Пантелеймон
Святой Великомученик и Целитель Пантелеймон Использование техники изонить для создания творческой композиции
Использование техники изонить для создания творческой композиции Презентация День Защитника Отечества подготовительная группа.
Презентация День Защитника Отечества подготовительная группа. кроссород по ОМРК и СЭ
кроссород по ОМРК и СЭ Платежная система Банка России
Платежная система Банка России Правоохранительные органы
Правоохранительные органы Дом из дров и глины по технологии Cordwood
Дом из дров и глины по технологии Cordwood Столярные соединения деталей. Шиповые столярные соединения. Разметка и изготовление шипов и проушин
Столярные соединения деталей. Шиповые столярные соединения. Разметка и изготовление шипов и проушин Ангельские чины
Ангельские чины Лексикология и лексикография
Лексикология и лексикография Консультация для воспитателей на тему: ЭТИКЕТ В ПРОЦЕССЕ ОВЛАДЕНИЯ ДОШКОЛЬНИКАМИ СОЦИАЛЬНОЙ РОЛЬЮ. СТОЛОВЫЙ ЭТИКЕТ
Консультация для воспитателей на тему: ЭТИКЕТ В ПРОЦЕССЕ ОВЛАДЕНИЯ ДОШКОЛЬНИКАМИ СОЦИАЛЬНОЙ РОЛЬЮ. СТОЛОВЫЙ ЭТИКЕТ Таблица сложения (1 класс)
Таблица сложения (1 класс) АИВ-инфекциясы кезіндегі шаралардың стандарттары және алгоритмдері
АИВ-инфекциясы кезіндегі шаралардың стандарттары және алгоритмдері Своя игра по рассказам В.Осеевой
Своя игра по рассказам В.Осеевой