- teoriya_avtomaticheskogo_upravleniya_Polulah_parth6

Содержание
- 2. 8. Дискретные системы Элементы КМОП-логики элемент 2И-НЕ
- 3. 8. Дискретные системы Элементы КМОП-логики в интегральной микросхеме
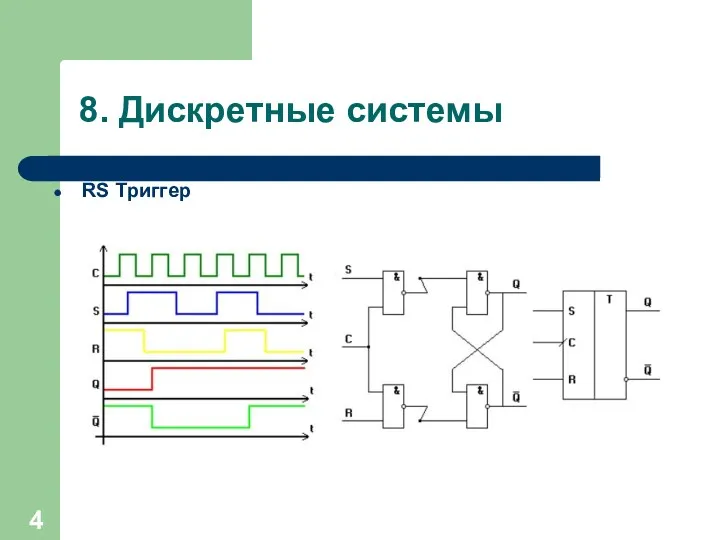
- 4. 8. Дискретные системы RS Триггер
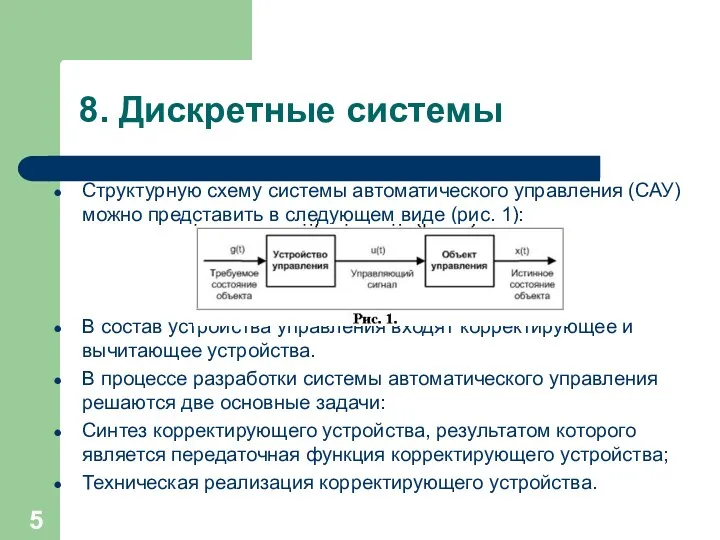
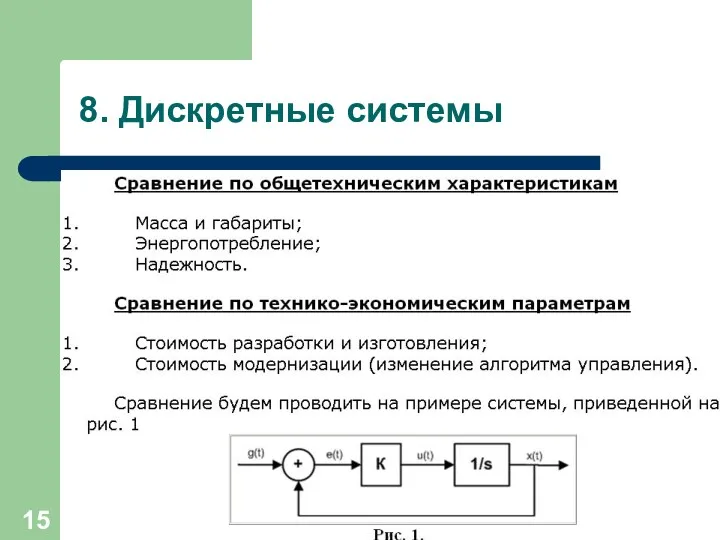
- 5. 8. Дискретные системы Структурную схему системы автоматического управления (САУ) можно представить в следующем виде (рис. 1):
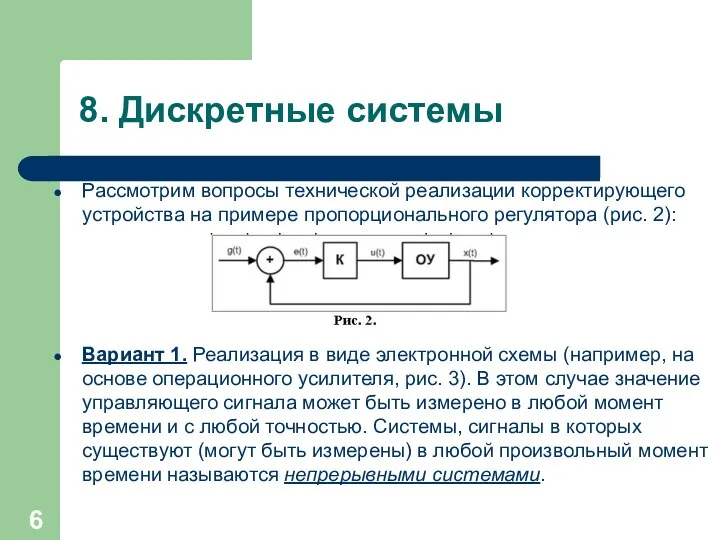
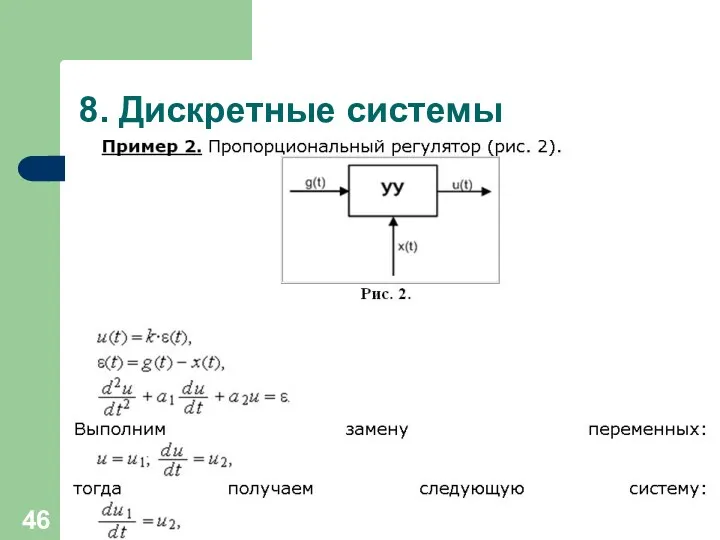
- 6. 8. Дискретные системы Рассмотрим вопросы технической реализации корректирующего устройства на примере пропорционального регулятора (рис. 2): Вариант
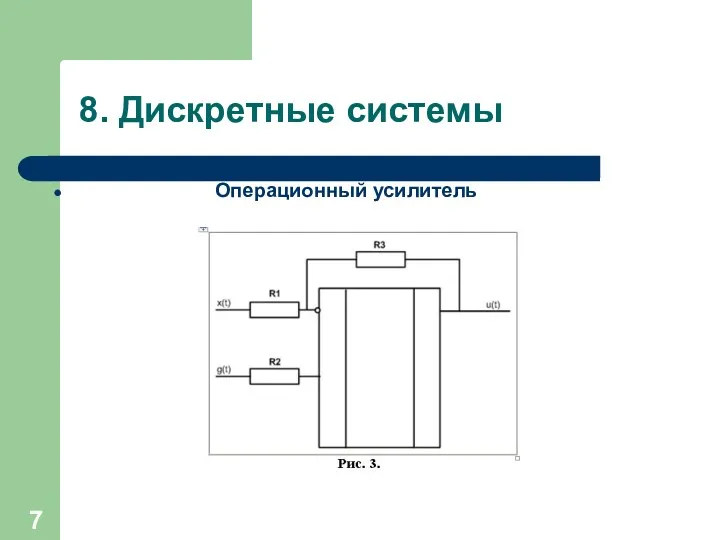
- 7. 8. Дискретные системы Операционный усилитель
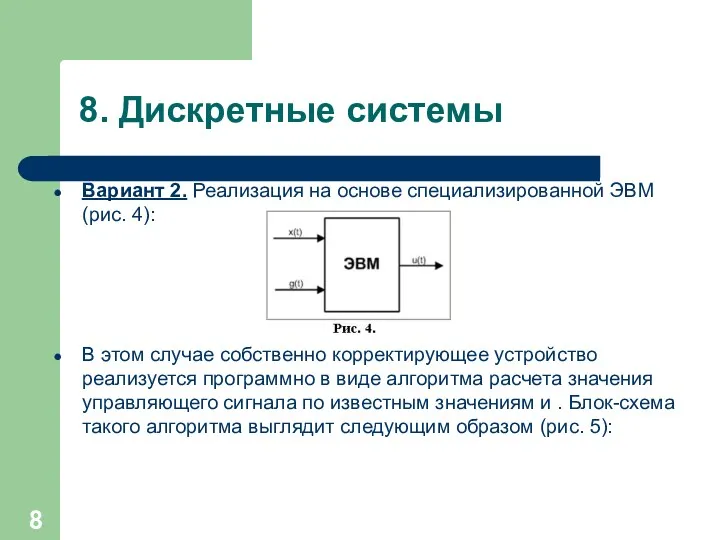
- 8. 8. Дискретные системы Вариант 2. Реализация на основе специализированной ЭВМ (рис. 4): В этом случае собственно
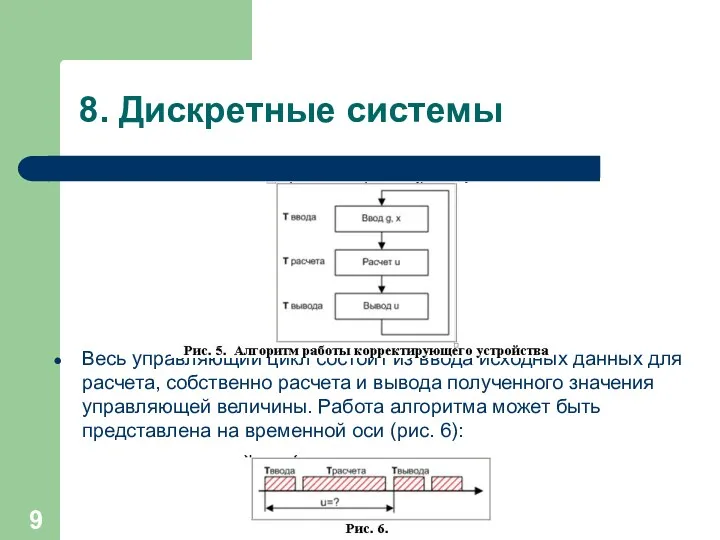
- 9. 8. Дискретные системы Весь управляющий цикл состоит из ввода исходных данных для расчета, собственно расчета и
- 10. 8. Дискретные системы Так как реализация алгоритма представляет собой набор операций, а каждая операция выполняется внутри
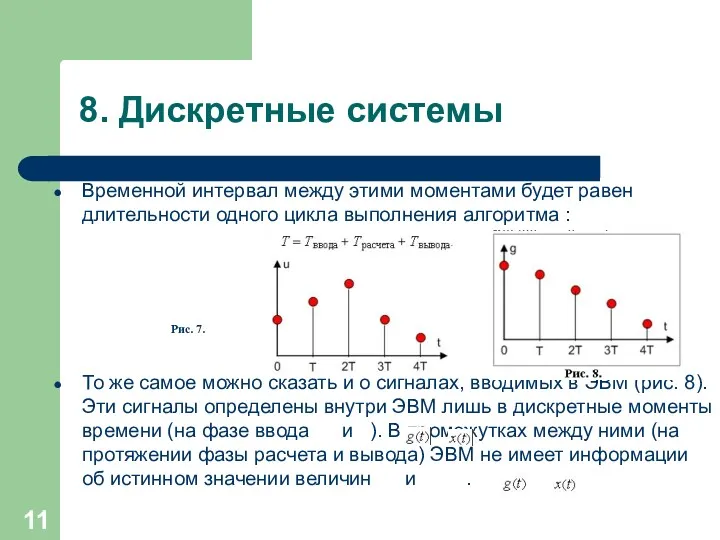
- 11. 8. Дискретные системы Временной интервал между этими моментами будет равен длительности одного цикла выполнения алгоритма :
- 12. 8. Дискретные системы Системы, сигналы в которых определены лишь в отдельные дискретные моменты времени, называются дискретными
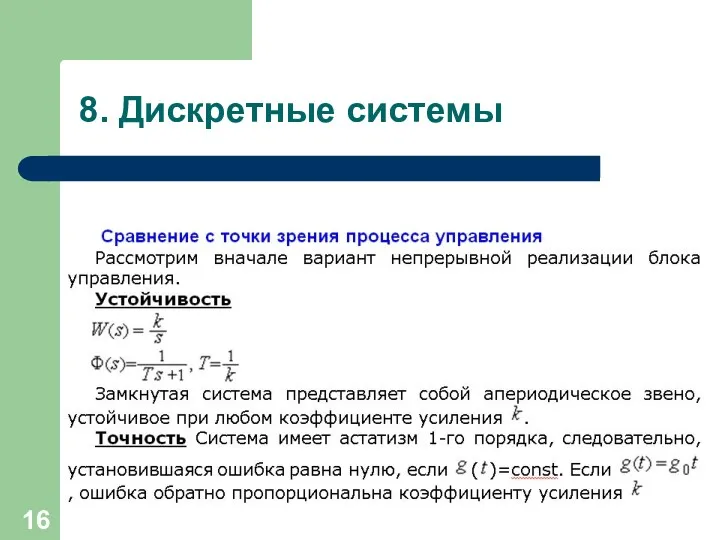
- 13. 8. Дискретные системы
- 14. 8. Дискретные системы
- 15. 8. Дискретные системы
- 16. 8. Дискретные системы
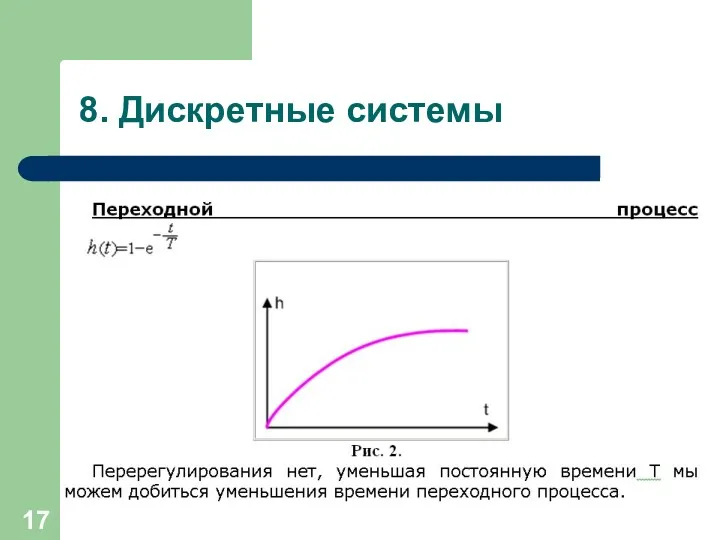
- 17. 8. Дискретные системы
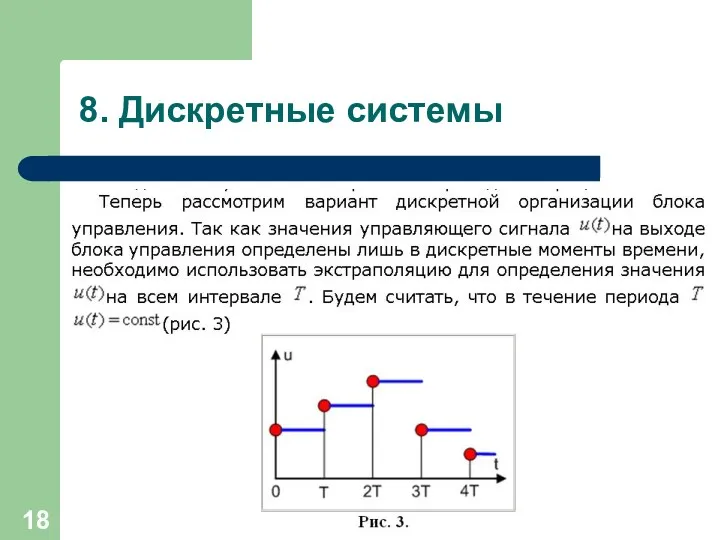
- 18. 8. Дискретные системы
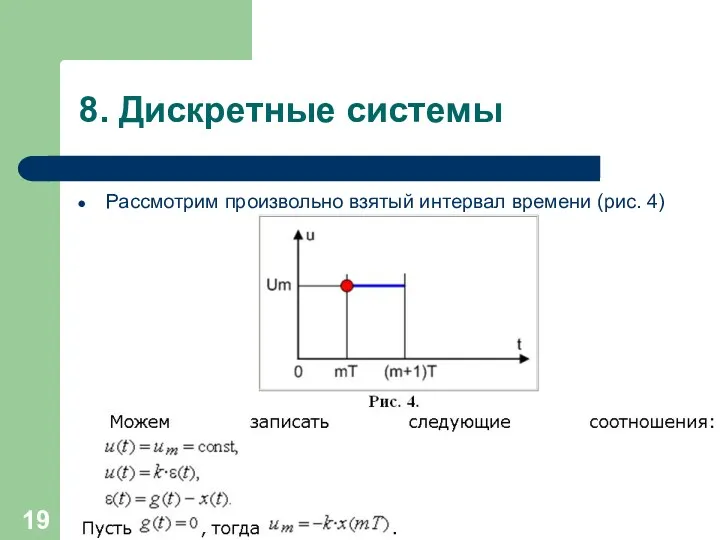
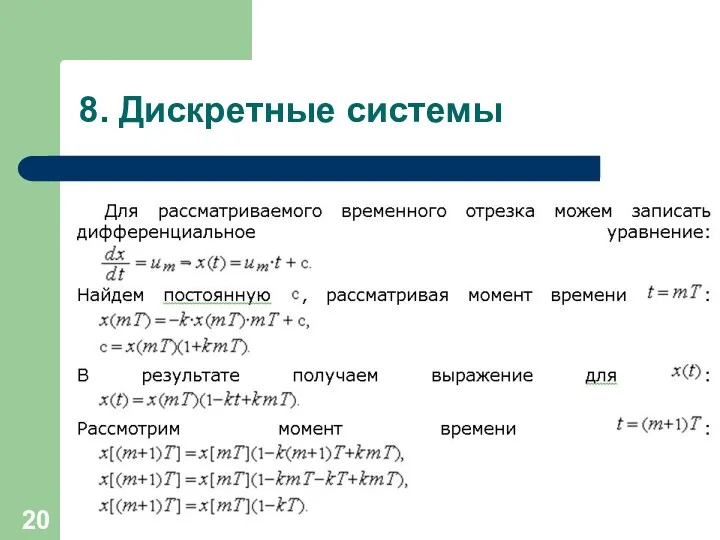
- 19. 8. Дискретные системы Рассмотрим произвольно взятый интервал времени (рис. 4)
- 20. 8. Дискретные системы
- 21. 8. Дискретные системы
- 22. 8. Дискретные системы
- 23. 8. Дискретные системы
- 24. 8. Дискретные системы
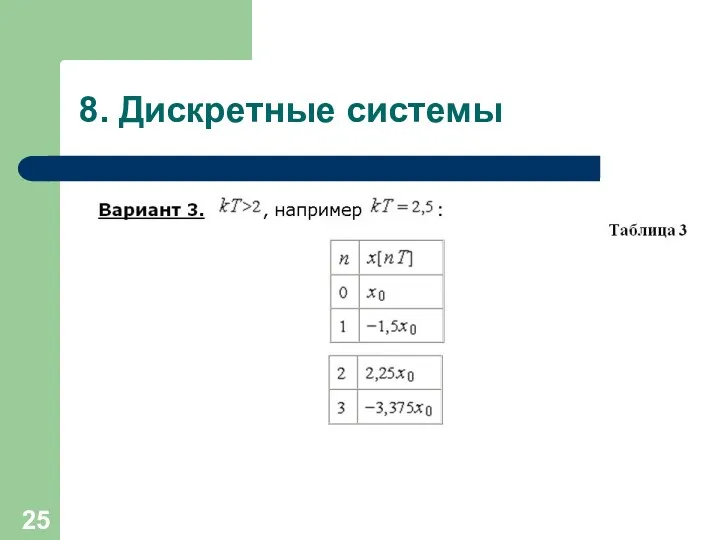
- 25. 8. Дискретные системы
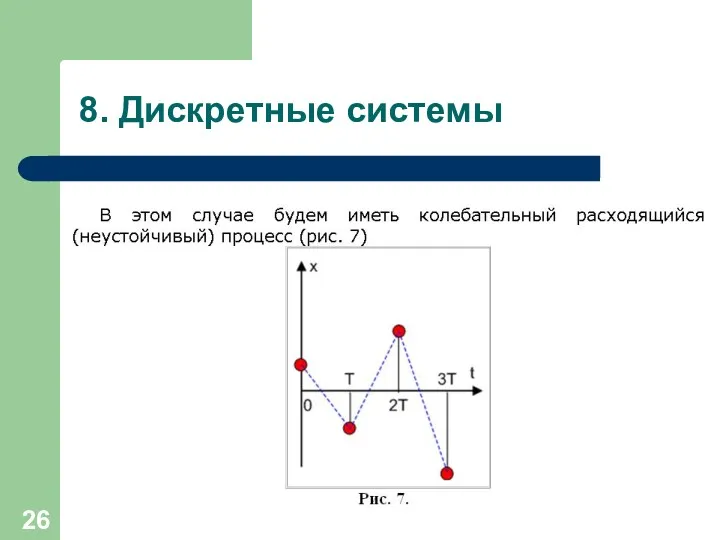
- 26. 8. Дискретные системы
- 27. 8. Дискретные системы
- 28. 8. Дискретные системы На основании этого можно сделать вывод, что при использовании линейных алгоритмов управления, цифровая
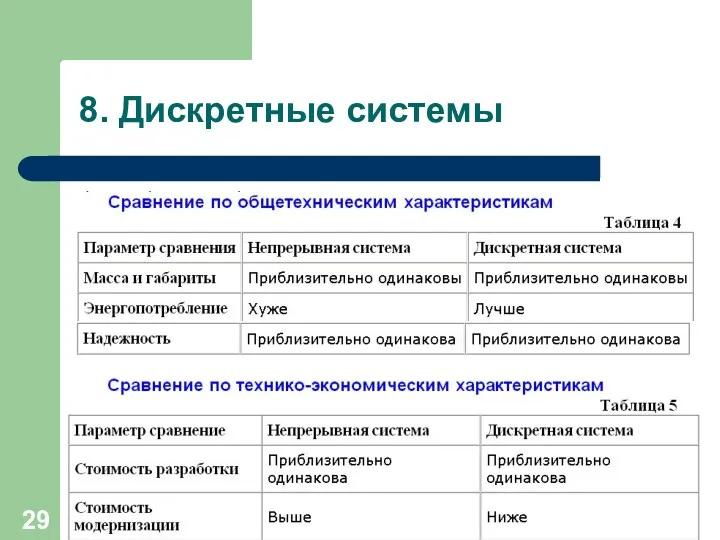
- 29. 8. Дискретные системы
- 30. 8. Дискретные системы
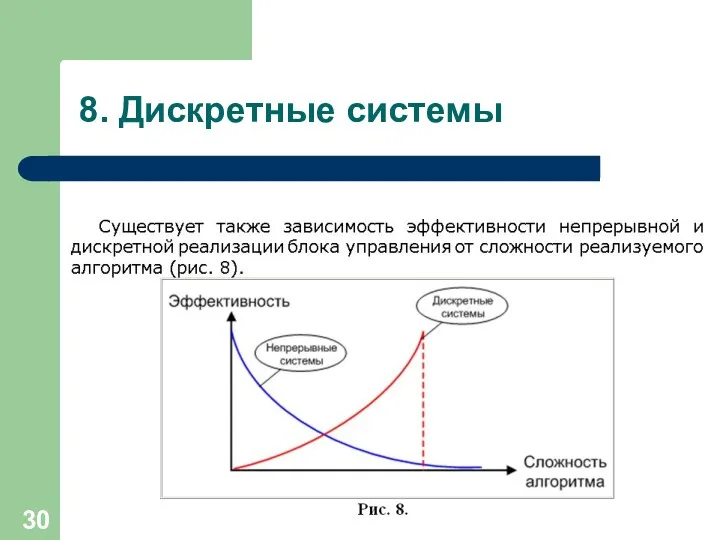
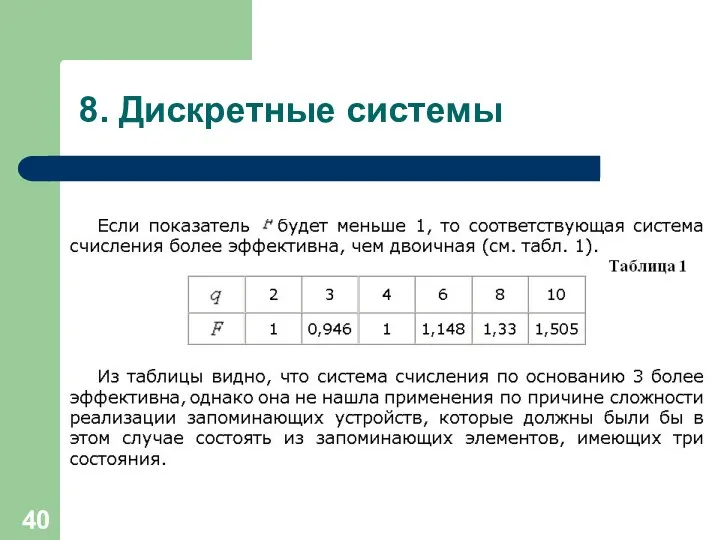
- 31. 8. Дискретные системы Из графика видно, что по мере усложнения алгоритма, эффективность непрерывной системы уменьшается, так
- 32. 8. Дискретные системы Вывод: Дискретная система управления имеет два основных преимущества по сравнению с непрерывной системой:
- 33. 8. Дискретные системы Определение, устройство и принцип действия микропроцессора Микропроцессором называется функционально законченное программно управляемое устройство,
- 34. 8. Дискретные системы Основными характеристиками микропроцессора являются его разрядность и тактовая частота, определяющая время выполнения микропроцессором
- 35. 8. Дискретные системы
- 36. 8. Дискретные системы
- 37. 8. Дискретные системы
- 38. 8. Дискретные системы
- 39. 8. Дискретные системы
- 40. 8. Дискретные системы
- 41. 8. Дискретные системы
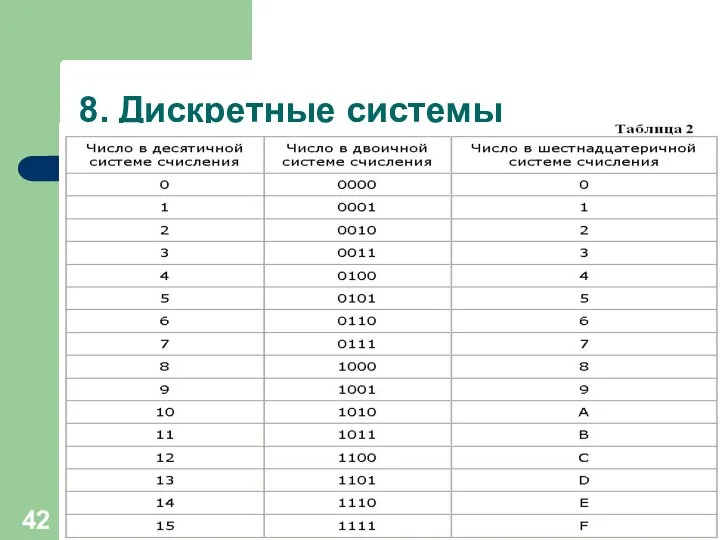
- 42. 8. Дискретные системы
- 43. 8. Дискретные системы При записи числа с использованием шестнадцатеричной системы счисления, на конце числа обычно ставится
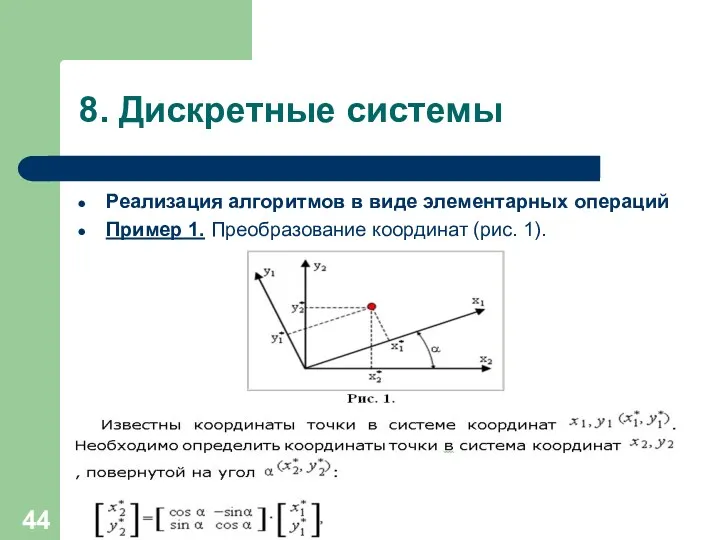
- 44. 8. Дискретные системы Реализация алгоритмов в виде элементарных операций Пример 1. Преобразование координат (рис. 1).
- 45. 8. Дискретные системы
- 46. 8. Дискретные системы
- 47. 8. Дискретные системы
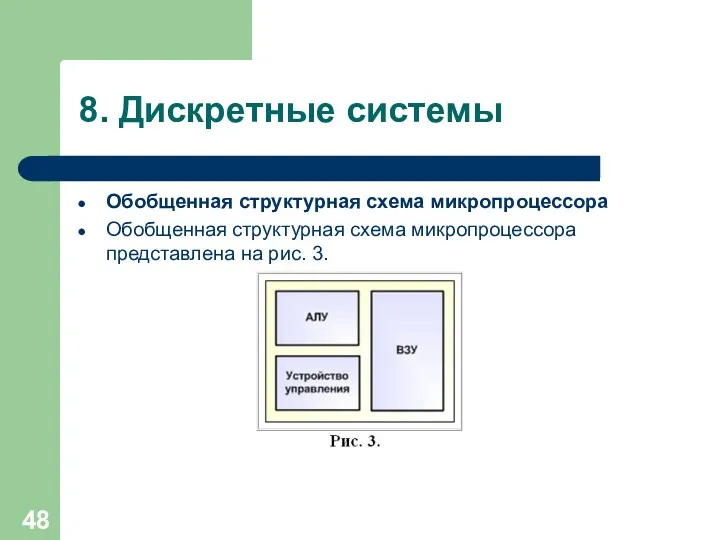
- 48. 8. Дискретные системы Обобщенная структурная схема микропроцессора Обобщенная структурная схема микропроцессора представлена на рис. 3.
- 49. 8. Дискретные системы Микропроцессор состоит из трех основных функциональных блоков: Арифметическо-логическое устройство (АЛУ). Выполняет простейшие арифметические
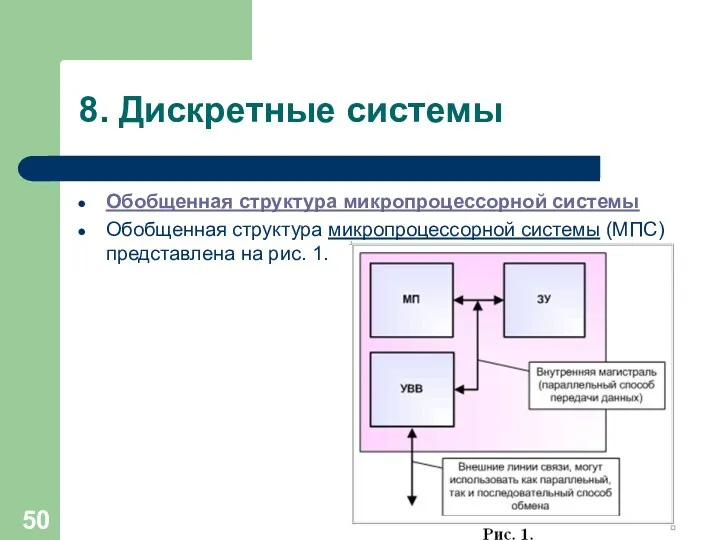
- 50. 8. Дискретные системы Обобщенная структура микропроцессорной системы Обобщенная структура микропроцессорной системы (МПС) представлена на рис. 1.
- 51. 8. Дискретные системы В состав МПС входят следующие блоки: Микропроцессор (МП) — выполняет обработку информации и
- 52. 8. Дискретные системы
- 54. Скачать презентацию

8. Дискретные системы
Элементы КМОП-логики элемент 2И-НЕ
8. Дискретные системы
Элементы КМОП-логики элемент 2И-НЕ

8. Дискретные системы
Элементы КМОП-логики в интегральной микросхеме
8. Дискретные системы
Элементы КМОП-логики в интегральной микросхеме
8. Дискретные системы
RS Триггер
8. Дискретные системы
RS Триггер
8. Дискретные системы
Структурную схему системы автоматического управления (САУ) можно представить
8. Дискретные системы
Структурную схему системы автоматического управления (САУ) можно представить
8. Дискретные системы
Рассмотрим вопросы технической реализации корректирующего устройства на примере
8. Дискретные системы
Рассмотрим вопросы технической реализации корректирующего устройства на примере
8. Дискретные системы
Операционный усилитель
8. Дискретные системы
Операционный усилитель
8. Дискретные системы
Вариант 2. Реализация на основе специализированной ЭВМ (рис. 4):
В
8. Дискретные системы
Вариант 2. Реализация на основе специализированной ЭВМ (рис. 4):
В
8. Дискретные системы
Весь управляющий цикл состоит из ввода исходных данных
8. Дискретные системы
Весь управляющий цикл состоит из ввода исходных данных
8. Дискретные системы
Так как реализация алгоритма представляет собой набор операций,
8. Дискретные системы
Так как реализация алгоритма представляет собой набор операций,
8. Дискретные системы
Временной интервал между этими моментами будет равен длительности
8. Дискретные системы
Временной интервал между этими моментами будет равен длительности
8. Дискретные системы
Системы, сигналы в которых определены лишь в отдельные
8. Дискретные системы
Системы, сигналы в которых определены лишь в отдельные
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
Рассмотрим произвольно взятый интервал времени (рис. 4)
8. Дискретные системы
Рассмотрим произвольно взятый интервал времени (рис. 4)
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы

8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
На основании этого можно сделать вывод, что при
8. Дискретные системы
На основании этого можно сделать вывод, что при
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
Из графика видно, что по мере усложнения алгоритма,
8. Дискретные системы
Из графика видно, что по мере усложнения алгоритма,
8. Дискретные системы
Вывод: Дискретная система управления имеет два основных преимущества
8. Дискретные системы
Вывод: Дискретная система управления имеет два основных преимущества
8. Дискретные системы
Определение, устройство и принцип действия микропроцессора
Микропроцессором называется
8. Дискретные системы
Определение, устройство и принцип действия микропроцессора
Микропроцессором называется
8. Дискретные системы
Основными характеристиками микропроцессора являются его разрядность и тактовая
8. Дискретные системы
Основными характеристиками микропроцессора являются его разрядность и тактовая
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
При записи числа с использованием шестнадцатеричной системы счисления,
8. Дискретные системы
При записи числа с использованием шестнадцатеричной системы счисления,
8. Дискретные системы
Реализация алгоритмов в виде элементарных операций
Пример 1. Преобразование
8. Дискретные системы
Реализация алгоритмов в виде элементарных операций
Пример 1. Преобразование
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
8. Дискретные системы
Обобщенная структурная схема микропроцессора
Обобщенная структурная схема микропроцессора представлена
8. Дискретные системы
Обобщенная структурная схема микропроцессора
Обобщенная структурная схема микропроцессора представлена
8. Дискретные системы
Микропроцессор состоит из трех основных функциональных блоков:
Арифметическо-логическое устройство
8. Дискретные системы
Микропроцессор состоит из трех основных функциональных блоков:
Арифметическо-логическое устройство
8. Дискретные системы
Обобщенная структура микропроцессорной системы
Обобщенная структура микропроцессорной системы
8. Дискретные системы
Обобщенная структура микропроцессорной системы
Обобщенная структура микропроцессорной системы
8. Дискретные системы
В состав МПС входят следующие блоки:
Микропроцессор (МП) —
8. Дискретные системы
В состав МПС входят следующие блоки:
Микропроцессор (МП) —
8. Дискретные системы
8. Дискретные системы
 Коммуникационный процесс
Коммуникационный процесс Жестокое обращение с детьми, как социально-психологическое явление
Жестокое обращение с детьми, как социально-психологическое явление Контрольно-измерительные материалы по русскому языку. Задание 5 в формате ЕГЭ-2015
Контрольно-измерительные материалы по русскому языку. Задание 5 в формате ЕГЭ-2015 Superman Day
Superman Day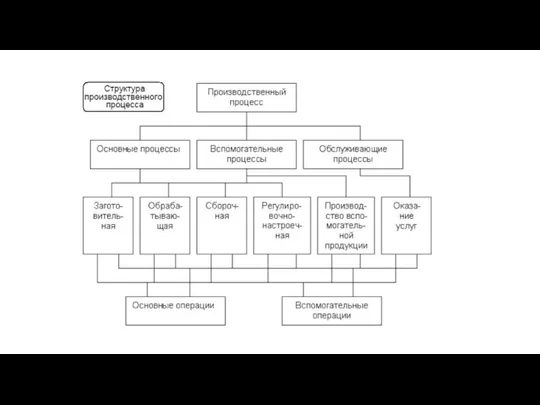 Структура производственного процесса
Структура производственного процесса 20231204_prezentatsiya_k_proektu_vliyanie_yaichnoy_skorlupy_na_plodorodie_pochvy
20231204_prezentatsiya_k_proektu_vliyanie_yaichnoy_skorlupy_na_plodorodie_pochvy Алгоритм Способы записи
Алгоритм Способы записи Концепция бережливое производство на предприятие
Концепция бережливое производство на предприятие Дидактическая игра Волшебный экран
Дидактическая игра Волшебный экран Природные зоны Африки
Природные зоны Африки Геодезия
Геодезия Неинвазивная пренатальная диагностика
Неинвазивная пренатальная диагностика Наши Люди. Программа лояльности
Наши Люди. Программа лояльности If You Love Me and You Know It Song
If You Love Me and You Know It Song Русские
Русские Анкетирование
Анкетирование Презентация к уроку: Основания
Презентация к уроку: Основания Готовимся к экзамену
Готовимся к экзамену Знай и соблюдай дорожного движения
Знай и соблюдай дорожного движения There’s some food. There are some drinks
There’s some food. There are some drinks Клеточная инженерия в селекции садовых культур. Методы генной инженерии растений. Генетическая трансформация растений
Клеточная инженерия в селекции садовых культур. Методы генной инженерии растений. Генетическая трансформация растений 20231016_prezentatsiya_microsoft_office_powerpoint
20231016_prezentatsiya_microsoft_office_powerpoint Содержание работ, проводимых на техническом комплексе
Содержание работ, проводимых на техническом комплексе Рабочие инструменты горных машин. ТИПИ. Тема 2
Рабочие инструменты горных машин. ТИПИ. Тема 2 Заседание совета депутатов муниципального округа Котловка. Отчет о работе учреждения в 2017 году
Заседание совета депутатов муниципального округа Котловка. Отчет о работе учреждения в 2017 году Принципы формирования городской среды
Принципы формирования городской среды Презентация по теме Гласный звук [а]. Буквы А, а. Строчная буква а.
Презентация по теме Гласный звук [а]. Буквы А, а. Строчная буква а. Системы n линейных уравнений с m неизвестными. Теорема Кронекера-Капелли. Методы их решения. Тема 3
Системы n линейных уравнений с m неизвестными. Теорема Кронекера-Капелли. Методы их решения. Тема 3