- Типы электрических машин. Лекция 1

Содержание
- 2. Асинхронные машины (асинхронные двигатели)
- 3. 95% приводов производственных механизмов имеют в своем составе асинхронный двигатель (насосно-компрессорные, кузнечно-прессовые, подъемно-транспортные системы; устройства электропривода
- 4. Асинхронные машины: Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна
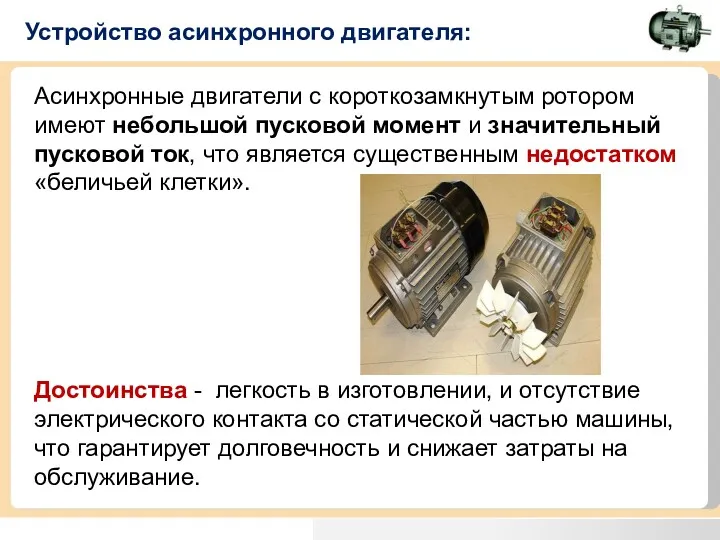
- 5. Достоинства: простота конструкции низкая себестоимость надежность (нет легко повреждающихся частей) высокий срок службы высокий пусковой момент
- 6. История создания асинхронных машин: Приоритет в создании асинхронного двигателя принадлежит Николе Тесла, который в Будапеште весной
- 7. История создания асинхронных машин: Вклад в развитие асинхронных двигателей внес Галилео Феррарис, который в 1885 г.
- 8. История создания асинхронных машин: В 1889 г. Доливо-Добровольский получил патент на трехфазный асинхронный двигатель с короткозамкнутым
- 9. Мощность асинхронных двигателей составляет от десятков мегаватт до долей ватт. Выпускаются двигатели в виде серий, охватывающих
- 10. В основе устройства АД лежит свойство 3х фазных систем создавать вращающееся магнитное поле Принцип действия АД
- 11. При этом n2 возникает только при пересечении витка магнитным полем. Устройства, у которых скорость вращения ротора
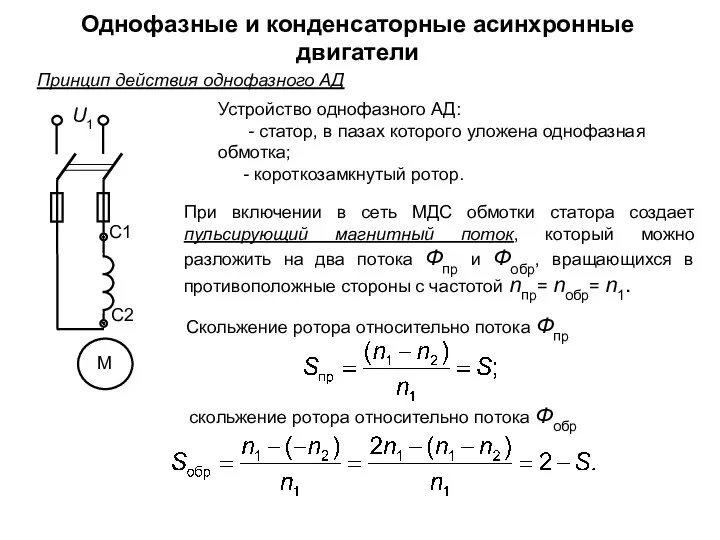
- 12. Относительное отставание частоты вращения ротора от частоты вращения магнитного поля называется скольжением “S” Sn = n1
- 13. Устройство асинхронной машины
- 14. Асинхронная машина состоит из двух частей: неподвижной – статора и вращающейся – ротора.
- 15. Конструкция статора Сердечник статора – полый цилиндр, собранный из отдельных колец, штампованных из листов электротехнической стали
- 16. Собранный пакет колец статора запрессован в корпус – станину (чугун), которая крепится к неподвижному жесткому основанию.
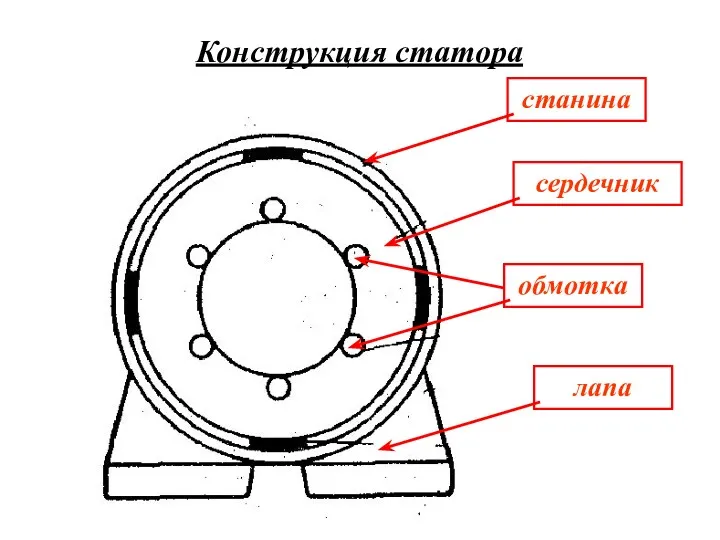
- 17. Конструкция статора станина сердечник обмотка лапа
- 19. 1 – станина; 2 – внутренняя поверхность листов; 3 – трехфазная обмотка
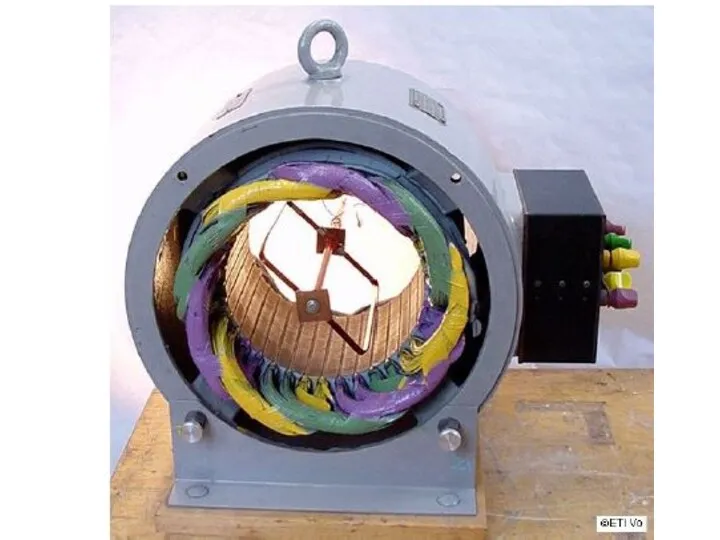
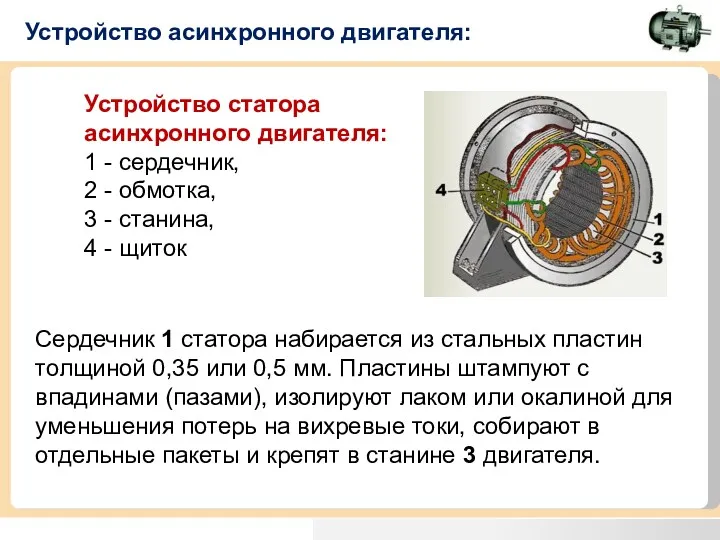
- 20. Устройство асинхронного двигателя: Устройство статора асинхронного двигателя: 1 - сердечник, 2 - обмотка, 3 - станина,
- 21. Начала и концы фаз обмоток статора выведены на клеммник, закреплённый на станине. Обмотка статора может быть
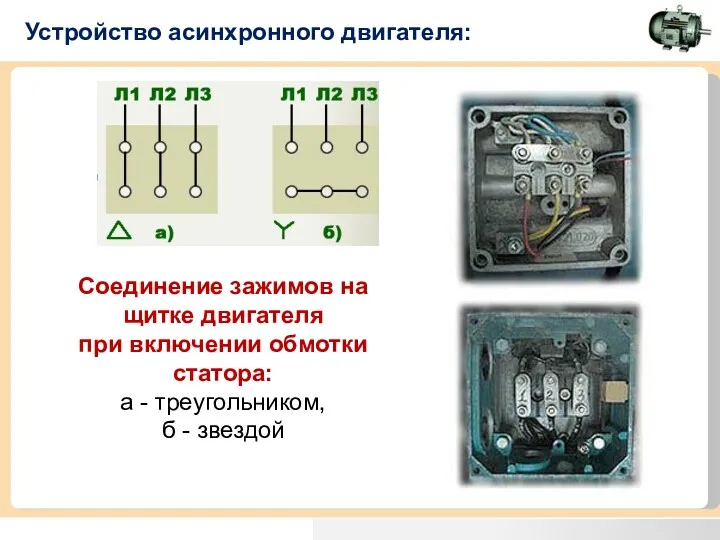
- 22. Устройство асинхронного двигателя: Соединение зажимов на щитке двигателя при включении обмотки статора: а - треугольником, б
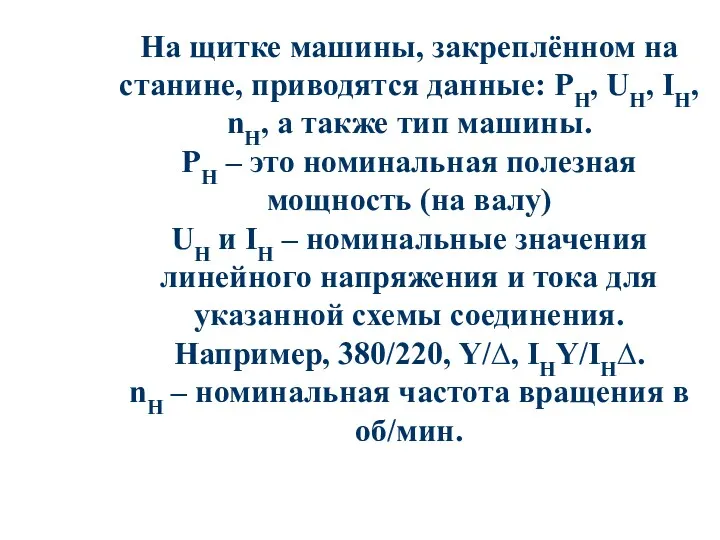
- 23. На щитке машины, закреплённом на станине, приводятся данные: РН, UН, IН, nН, а также тип машины.
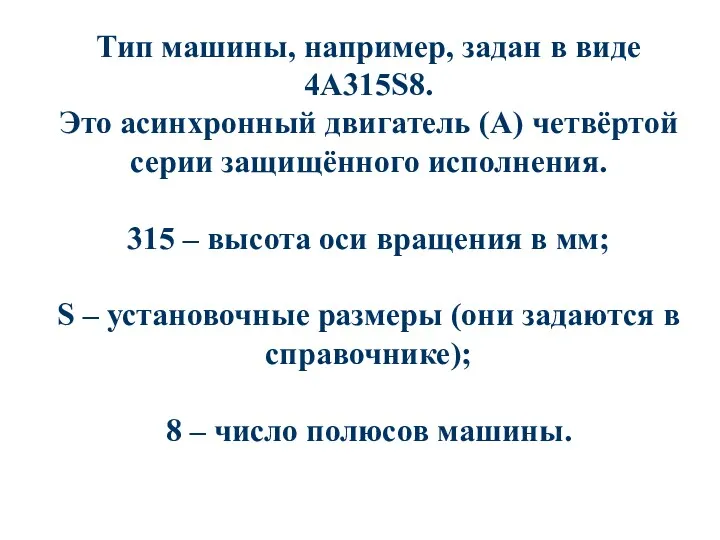
- 24. Тип машины, например, задан в виде 4A315S8. Это асинхронный двигатель (А) четвёртой серии защищённого исполнения. 315
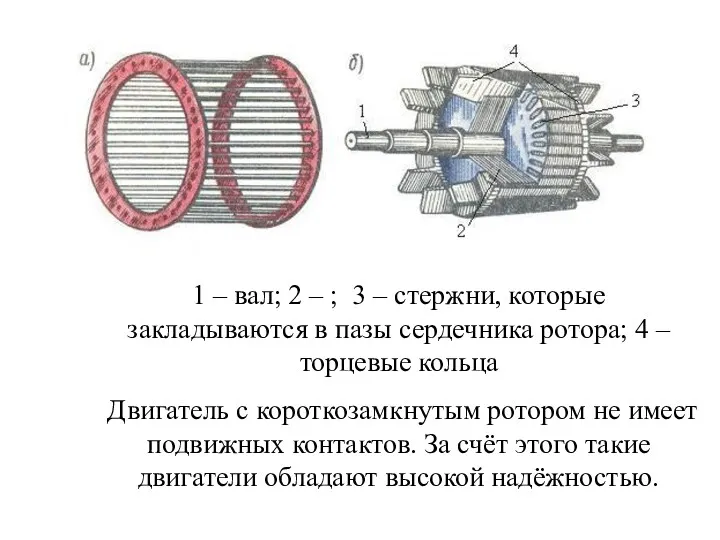
- 25. Устройство асинхронного двигателя: Короткозамкнутый ротор Ротор короткозамкнутого асинхронного двигателя: а - устройство, б - обмотка; 1
- 26. 1 – вал; 2 – ; 3 – стержни, которые закладываются в пазы сердечника ротора; 4
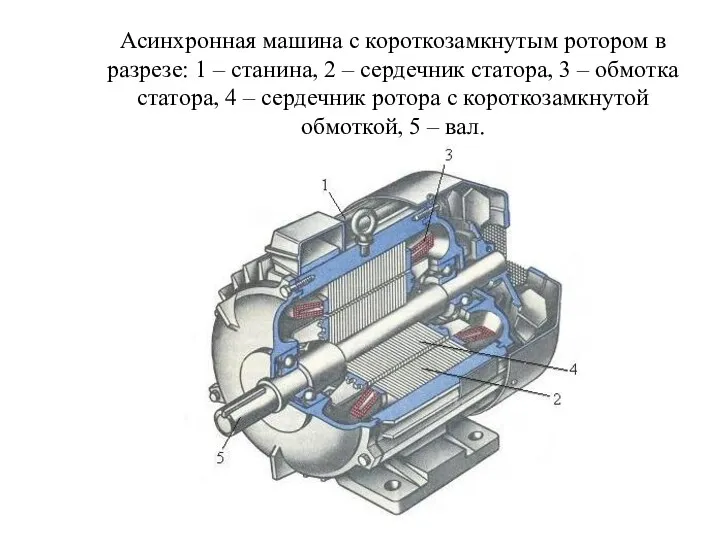
- 28. Асинхронная машина с короткозамкнутым ротором в разрезе: 1 – станина, 2 – сердечник статора, 3 –
- 29. Устройство асинхронного двигателя: Асинхронные двигатели с короткозамкнутым ротором имеют небольшой пусковой момент и значительный пусковой ток,
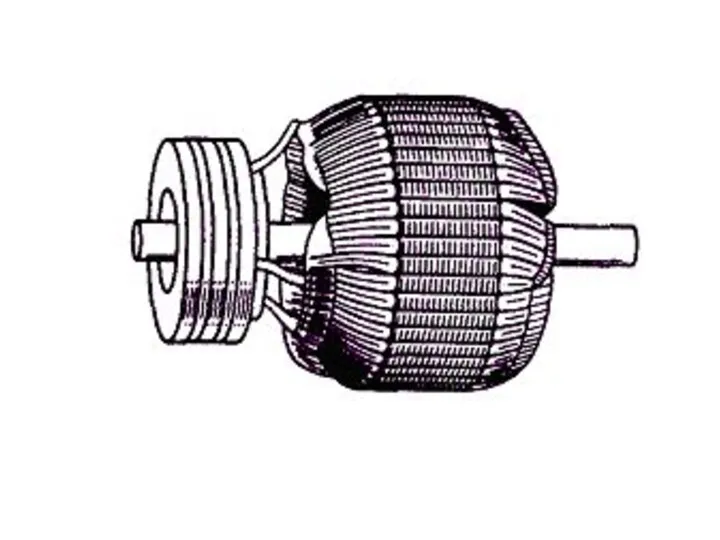
- 30. Устройство асинхронного двигателя: Фазный ротор Фазная обмотка ротора выполнена подобно статорной, т. е. проводники соответствующим образом
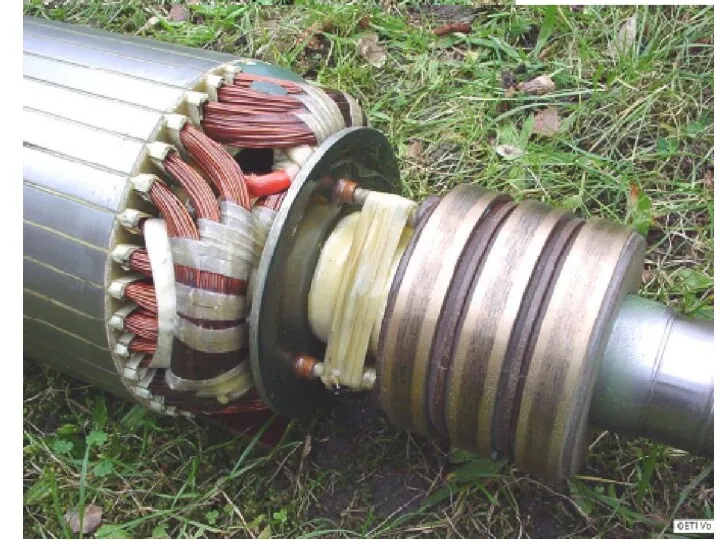
- 31. Обмотка фазного ротора выполняется изолированным проводом (обычно трехфазная с тем же числом катушек, что и обмотка
- 33. На кольца наложены щетки, установленные в щеткодержателях. Через щетки и кольца обмотка присоединена к трехфазному реостату.
- 34. Короткозамкнутый ротор Фазный ротор
- 35. Асинхронная машины с фазным ротором в разрезе: 1 – станина, 2 – обмотка статора, 3 –
- 36. Коллекторный узел
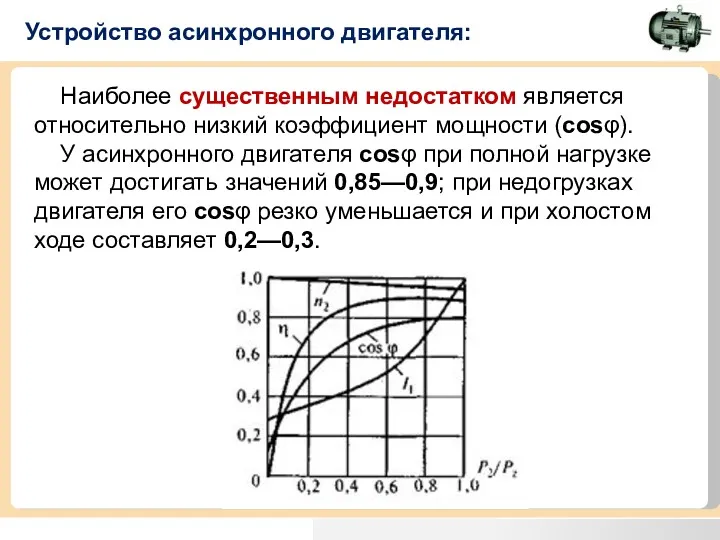
- 38. Устройство асинхронного двигателя: Наиболее существенным недостатком является относительно низкий коэффициент мощности (cosφ). У асинхронного двигателя cosφ
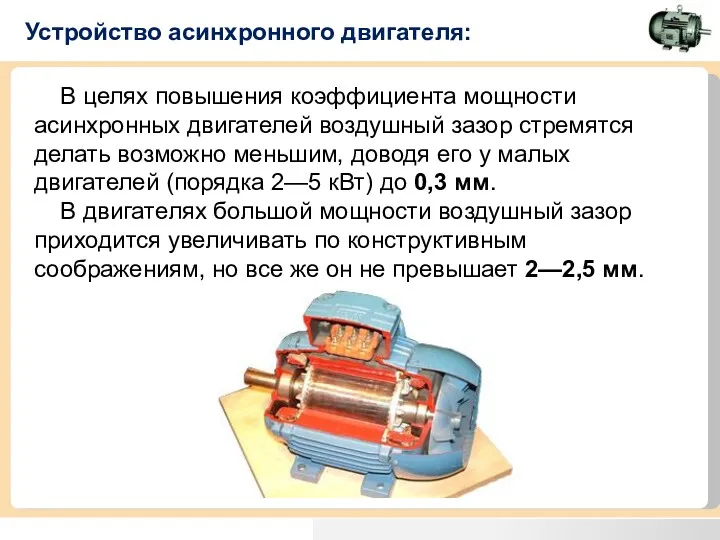
- 39. Устройство асинхронного двигателя: В целях повышения коэффициента мощности асинхронных двигателей воздушный зазор стремятся делать возможно меньшим,
- 40. Статор Создание вращающегося магнитного поля
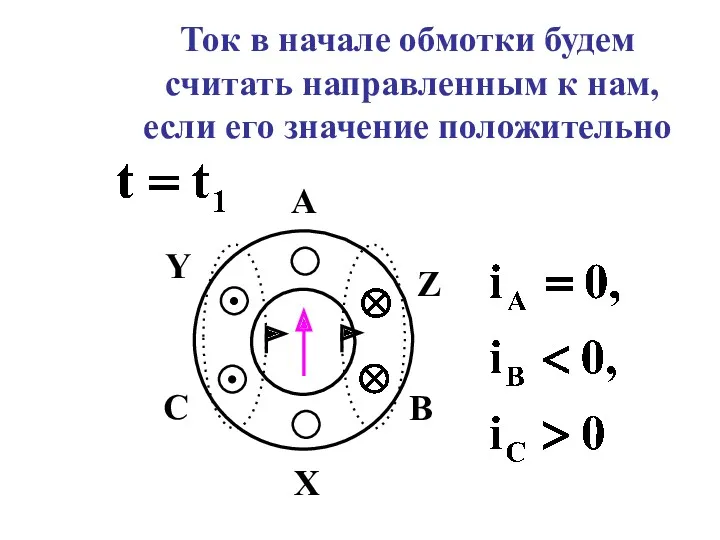
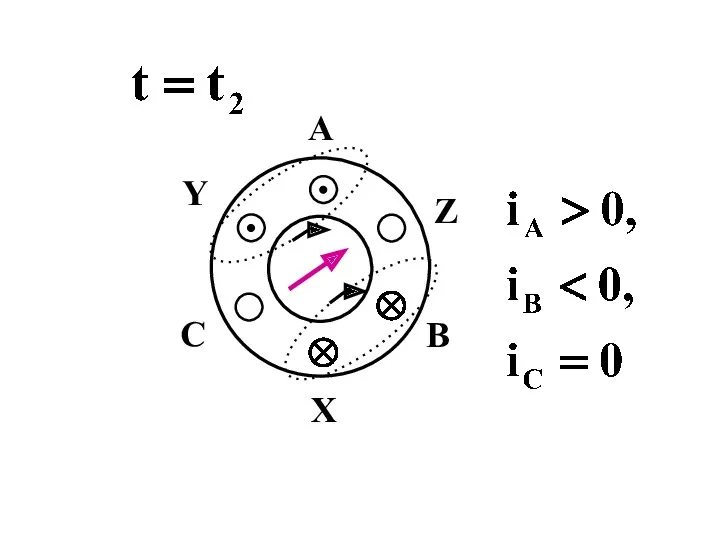
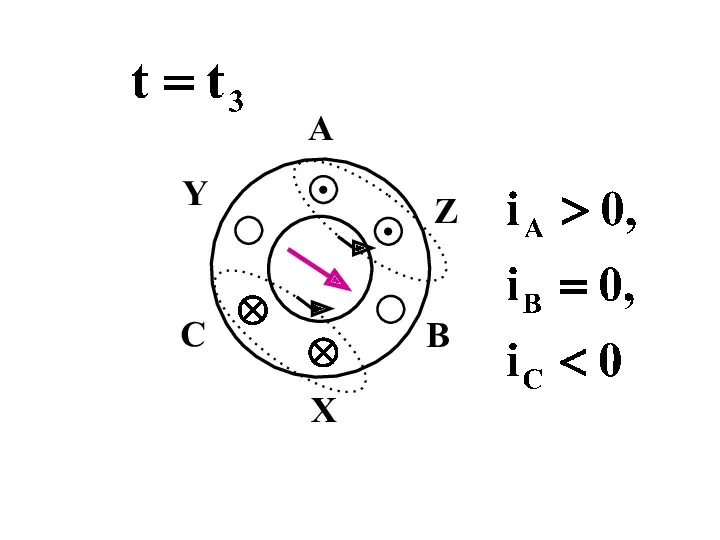
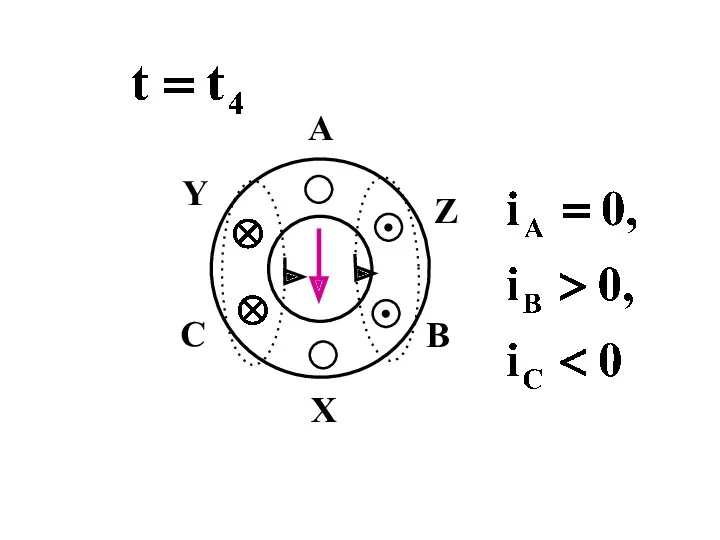
- 43. Выбираем моменты времени через одну шестую часть периода. Для каждого из этих моментов последовательно изобразим направления
- 44. Ток в начале обмотки будем считать направленным к нам, если его значение положительно
- 48. За период направление суммарного магнитного поля сделает один оборот. В этом случае обмотка статора создаст магнитное
- 49. Таким образом, внутри статора существует постоянное по значению равномерно вращающееся магнитное поле. Основное условие создания такого
- 50. Если поменять любые две фазы местами, то изменится направление вращения магнитного поля (реверсирование) Видоизменив обмотку статора,
- 51. В этом случае частота вращения поля будет в 2 раза меньше, чем для р=1. Число пар
- 52. Частоты вращения магнитного поля
- 53. Режимы работы трехфазной асинхронной машины Режим двигателя: на обмотку статора подается симметричная система токов и в
- 54. Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий ротор за вращающимся магнитным полем.
- 55. Относительную разность частот вращения магнитного поля и ротора называют скольжением: В режиме двигателя, т.е. преобразование электрической
- 56. Если на работающем двигателе ротор разогнать с помощью двигателя до частоты > n1 в том же
- 57. Режим электромагнитного тормоза (S ≥ 1). Ротор вращается в направлении, противоположном направлению вращения поля статора. Это
- 58. двигатель генератор тормоз
- 59. В первом квадранте графика машина работает в режиме двигателя «Д», здесь n1 > n2. В точке
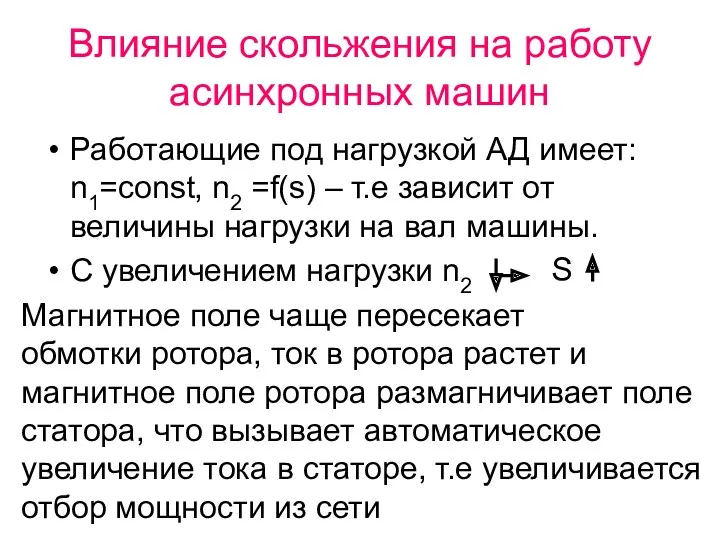
- 60. Влияние скольжения на работу асинхронных машин Работающие под нагрузкой АД имеет: n1=const, n2 =f(s) – т.е
- 61. С уменьшением нагрузки на вал машины, по аналогии, уменьшается отбор мощности от сети. Это автоматическое саморегулирование
- 62. Влияние S на частоту э.д.с. ротора и ее величину E1= 4.44 f1w1ФМ E2= 4.44 f2s w2ФМ
- 63. n s = (n1 – n2 )/ n1 частота скольжения f2s = nsp где р –
- 64. Влияние S на индуктивное сопротивление ротора и на ток в роторе Комплексное сопротивление ротора ZP =
- 65. Электромагнитный момент и механические характеристики 3-х фазного АД CМ – постоянный коэффициент Ток в роторе Ψ2s
- 67. Участок от 0 до МНОМ Участок от МНОМ до ММАХ это возможная перегрузка
- 68. Участок Ммах до МПУСК (S = 1) это неустойчивый режим. Для расчета момента можно использовать уравнение
- 70. Рабочие характеристики АД MB,I1,n2 cosφ1 P2 MB n2 η cosφ I1 η
- 71. Приведение параметров обмотки ротора и схема замещения АД Для того, чтобы векторы ЭДС, напряжений и токов
- 72. Приведение параметров обмотки ротора и схема замещения АД
- 73. Этим уравнениям соответствует схема замещения АД, на которой магнитная связь обмоток статора и ротора заменена электрической:
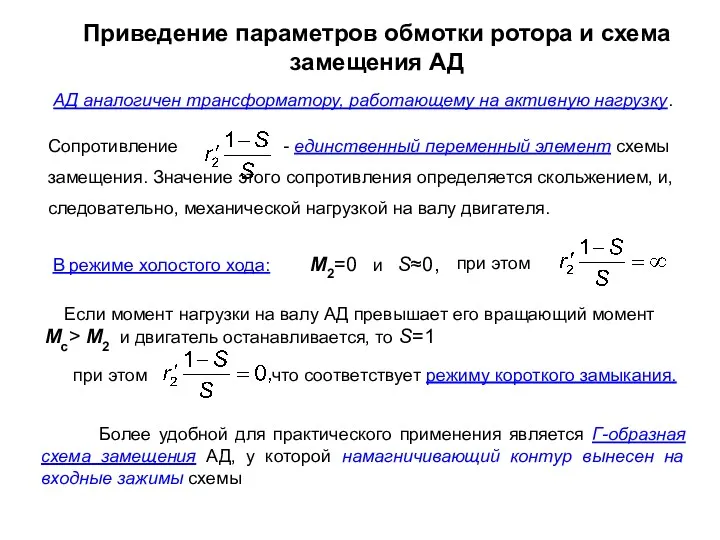
- 74. Приведение параметров обмотки ротора и схема замещения АД АД аналогичен трансформатору, работающему на активную нагрузку. В
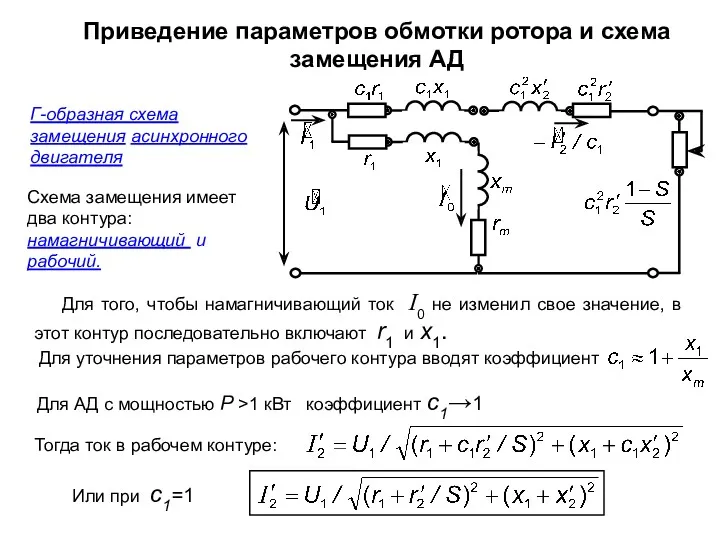
- 75. Приведение параметров обмотки ротора и схема замещения АД Для того, чтобы намагничивающий ток I0 не изменил
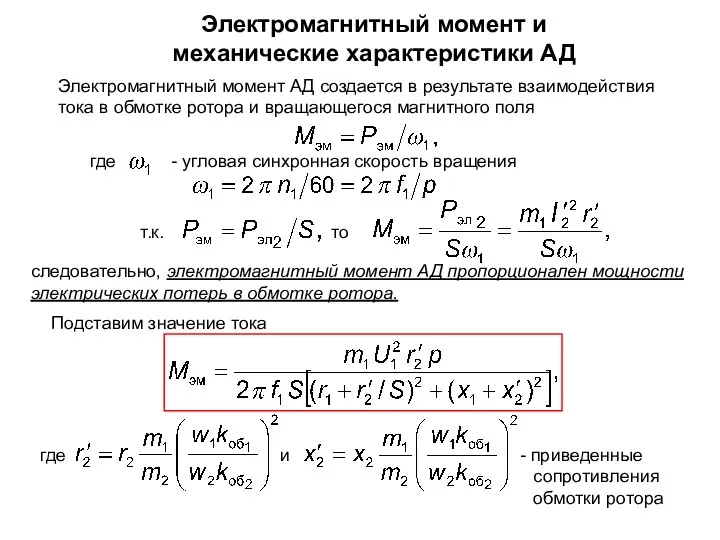
- 76. Электромагнитный момент и механические характеристики АД следовательно, электромагнитный момент АД пропорционален мощности электрических потерь в обмотке
- 77. Электромагнитный момент и механические характеристики АД
- 78. Рабочие характеристики АД К рабочим характеристикам относятся зависимости от полезной мощности : Увеличение активного сопротивления ротора
- 79. Рабочие характеристики АД
- 80. Рабочие характеристики АД
- 81. Пуск и регулирование частоты вращения асинхронных двигателей Пусковые свойства АД определяются значениями пускового тока I п
- 82. б) пуск при пониженном напряжении: снижение пускового тока I п сопровождается снижением пускового момента Мп Пуск
- 83. - переключением обмотки статора со звезды на треугольник б) пуск при пониженном напряжении: Пуск асинхронных двигателей
- 84. Пуск асинхронных двигателей с фазным ротором
- 85. АД с КЗР и улучшенными пусковыми характеристиками - двигатель с глубокими пазами на роторе - эффект
- 86. Регулирование частоты вращения АД Частоту вращения ротора АД можно регулировать изменением: 1) скольжения S; 2) частоты
- 87. Регулирование частоты вращения АД Вращающееся магнитное поле становится эллиптическим и приобретает обратную составляющую, создающую тормозящий момент
- 88. Регулирование частоты вращения АД за счет использования источников питания с регулируемой частотой тока - преобразователей частоты
- 89. Пуск 3-х фазного АД в ход Пусковые свойства определяются величинами: пусковым током, начальным пусковым моментом, плавностью
- 90. § 8.1 Пуск АД с фазным ротором
- 91. Пуск АД с короткозамкнутым ротором Прямой пуск. Применим для АД с короткозамкнутым ротором мощностью Р2 ≤
- 92. Пуск при пониженном напряжении. Для уменьшения Iпуск на время понижают напряжение между выводами фазных обмоток статора,
- 93. Использование АД с короткозамкнутым ротором специальной конструкции 1. Обмотка ротора - двойная беличья клетка, т.е. ротор
- 94. Регулирование частоты вращения 3-х фазного АД Частота вращения ротора АД с короткозамкнутым ротором: - метод частотного
- 95. Метод частотного регулирования Это плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках
- 96. Схема включения АД с частотным регулированием скорости
- 97. Механические характеристики.
- 98. Метод изменения числа пар полюсов Основан на изменении числа пар полюсов вращающегося магнитного поля статора, т.
- 99. Метод реостатного регулирования Применяется у АД с фазным ротором. В цепь обмотки ротора вводится трехфазный реостат,
- 100. Комплексная мощность трехфазного асинхронного двигателя где активная и реактивная мощности двигателя
- 101. Активная мощность определяет среднюю мощность необратимого преобразования электрической энергии в механическую, тепловую и другие виды энергии,
- 102. Коэффициент полезного действия АД Р2 - полезная мощность на валу Р1 – мощность потребляемая из сети
- 103. Энергетическая диаграмма двигателя
- 104. мощность потерь на нагревание проводов обмотки статора (потери в меди); мощность потерь на гистерезис и вихревые
- 105. добавочные потери (создаются пульсациями магнитного поля); механические потери; полезная механическая мощность, отдаваемая на валу двигателя Мощность
- 106. Однофазные и конденсаторные асинхронные двигатели Принцип действия однофазного АД Устройство однофазного АД: - статор, в пазах
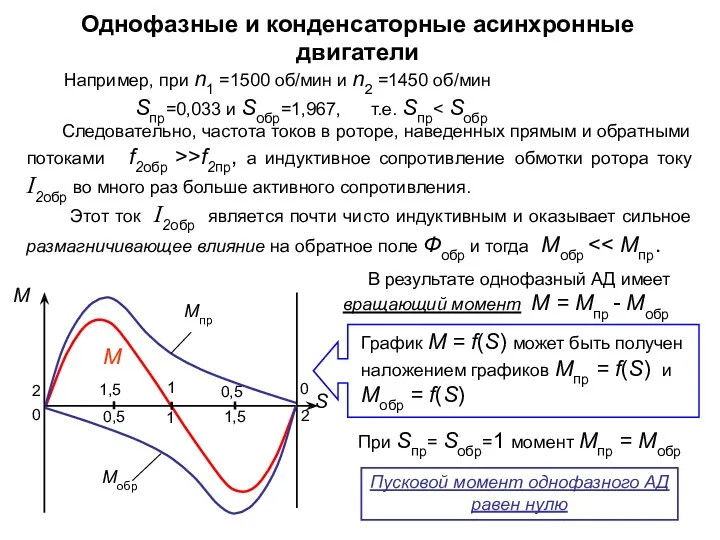
- 107. Однофазные и конденсаторные асинхронные двигатели Следовательно, частота токов в роторе, наведенных прямым и обратными потоками f2обр
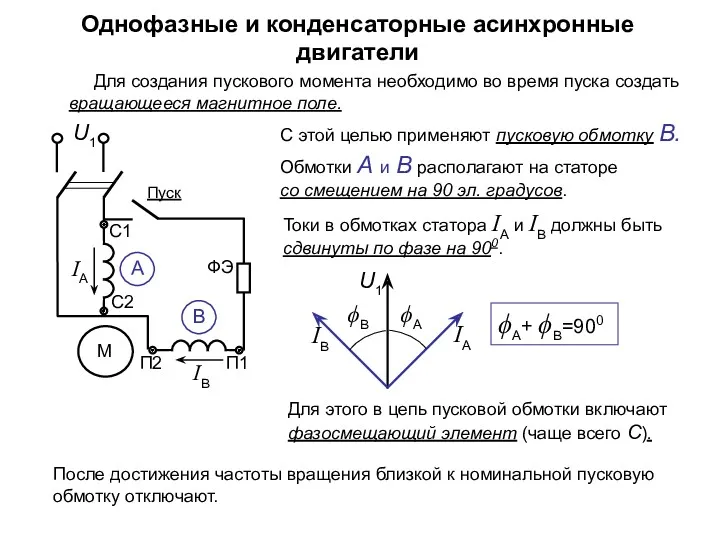
- 108. Однофазные и конденсаторные асинхронные двигатели Для создания пускового момента необходимо во время пуска создать вращающееся магнитное
- 110. Скачать презентацию
Асинхронные машины
(асинхронные двигатели)
Асинхронные машины
(асинхронные двигатели)
95% приводов производственных механизмов имеют в своем составе асинхронный двигатель
(насосно-компрессорные, кузнечно-прессовые,
95% приводов производственных механизмов имеют в своем составе асинхронный двигатель
(насосно-компрессорные, кузнечно-прессовые,
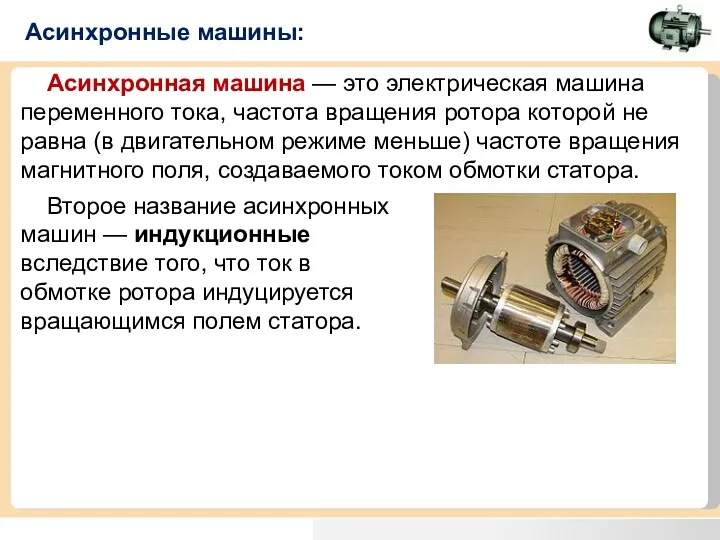
Асинхронные машины:
Асинхронная машина — это электрическая машина переменного тока, частота
Асинхронные машины:
Асинхронная машина — это электрическая машина переменного тока, частота
Достоинства:
простота конструкции
низкая себестоимость
надежность (нет легко повреждающихся частей)
высокий
Достоинства:
простота конструкции
низкая себестоимость
надежность (нет легко повреждающихся частей)
высокий
История создания асинхронных машин:
Приоритет в создании асинхронного двигателя принадлежит Николе
История создания асинхронных машин:
Приоритет в создании асинхронного двигателя принадлежит Николе
История создания асинхронных машин:
Вклад в развитие асинхронных двигателей внес Галилео
История создания асинхронных машин:
Вклад в развитие асинхронных двигателей внес Галилео
История создания асинхронных машин:
В 1889 г. Доливо-Добровольский получил патент на
История создания асинхронных машин:
В 1889 г. Доливо-Добровольский получил патент на
Мощность асинхронных двигателей составляет от десятков мегаватт до долей ватт.
Выпускаются двигатели
Мощность асинхронных двигателей составляет от десятков мегаватт до долей ватт.
Выпускаются двигатели
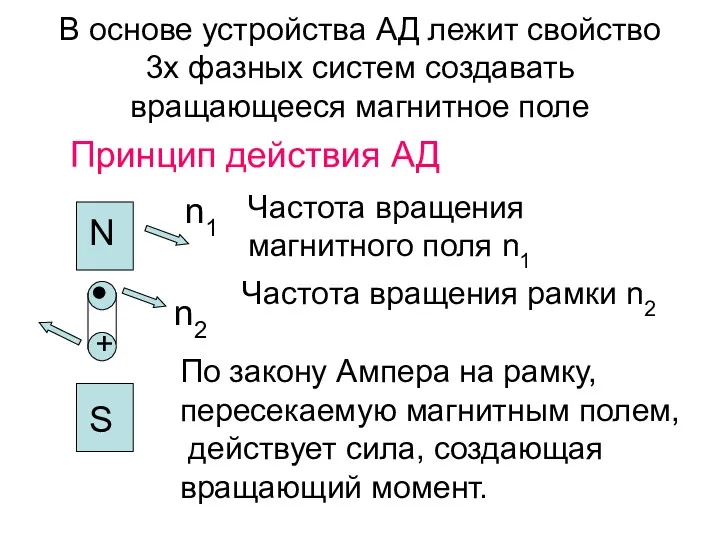
В основе устройства АД лежит свойство 3х фазных систем создавать вращающееся
В основе устройства АД лежит свойство 3х фазных систем создавать вращающееся
При этом n2< n1, т.к. момент силы
возникает только при пересечении
При этом n2< n1, т.к. момент силы
возникает только при пересечении
Относительное отставание
частоты вращения ротора от частоты вращения магнитного поля называется
Относительное отставание
частоты вращения ротора от частоты вращения магнитного поля называется
Устройство асинхронной машины
Устройство асинхронной машины
Асинхронная машина состоит из двух частей: неподвижной – статора и вращающейся
Асинхронная машина состоит из двух частей: неподвижной – статора и вращающейся
Конструкция статора
Сердечник статора – полый цилиндр, собранный из отдельных колец, штампованных
Конструкция статора
Сердечник статора – полый цилиндр, собранный из отдельных колец, штампованных
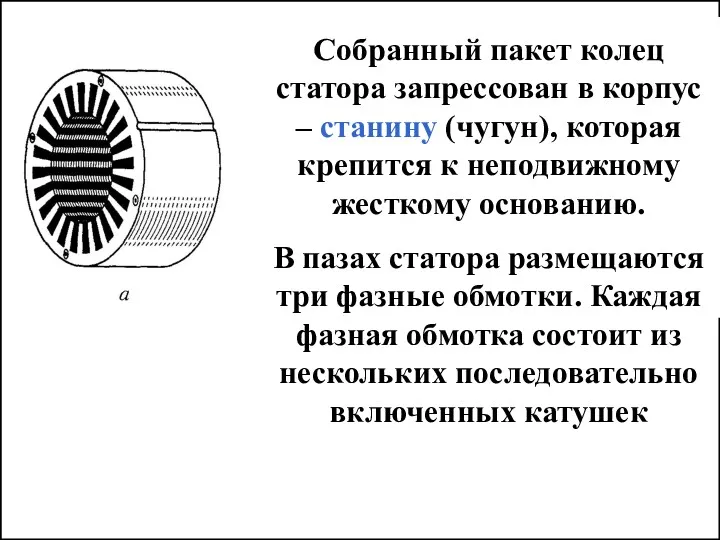
Собранный пакет колец статора запрессован в корпус – станину (чугун), которая
Собранный пакет колец статора запрессован в корпус – станину (чугун), которая
Конструкция статора
станина
сердечник
обмотка
лапа
Конструкция статора
станина
сердечник
обмотка
лапа

1 – станина;
2 – внутренняя поверхность листов;
3 – трехфазная обмотка
1 – станина;
2 – внутренняя поверхность листов;
3 – трехфазная обмотка
Устройство асинхронного двигателя:
Устройство статора асинхронного двигателя:
1 - сердечник,
2 - обмотка,
Устройство асинхронного двигателя:
Устройство статора асинхронного двигателя:
1 - сердечник,
2 - обмотка,
Начала и концы фаз обмоток статора выведены на клеммник, закреплённый на
Начала и концы фаз обмоток статора выведены на клеммник, закреплённый на
Устройство асинхронного двигателя:
Соединение зажимов на щитке двигателя
при включении обмотки статора:
а -
Устройство асинхронного двигателя:
Соединение зажимов на щитке двигателя при включении обмотки статора: а -
На щитке машины, закреплённом на станине, приводятся данные: РН, UН, IН,
На щитке машины, закреплённом на станине, приводятся данные: РН, UН, IН,
Тип машины, например, задан в виде 4A315S8.
Это асинхронный двигатель (А)
Тип машины, например, задан в виде 4A315S8.
Это асинхронный двигатель (А)

Устройство асинхронного двигателя:
Короткозамкнутый ротор
Ротор короткозамкнутого асинхронного двигателя:
а - устройство,
б
Устройство асинхронного двигателя:
Короткозамкнутый ротор
Ротор короткозамкнутого асинхронного двигателя:
а - устройство,
б
1 – вал; 2 – ; 3 – стержни, которые закладываются
1 – вал; 2 – ; 3 – стержни, которые закладываются

Асинхронная машина с короткозамкнутым ротором в разрезе: 1 – станина, 2
Асинхронная машина с короткозамкнутым ротором в разрезе: 1 – станина, 2
Устройство асинхронного двигателя:
Асинхронные двигатели с короткозамкнутым ротором имеют небольшой пусковой момент
Устройство асинхронного двигателя:
Асинхронные двигатели с короткозамкнутым ротором имеют небольшой пусковой момент

Устройство асинхронного двигателя:
Фазный ротор
Фазная обмотка ротора выполнена подобно статорной, т.
Устройство асинхронного двигателя:
Фазный ротор
Фазная обмотка ротора выполнена подобно статорной, т.
Обмотка фазного ротора выполняется изолированным проводом (обычно трехфазная с тем же
Обмотка фазного ротора выполняется изолированным проводом (обычно трехфазная с тем же

На кольца наложены щетки, установленные в щеткодержателях. Через щетки и кольца
На кольца наложены щетки, установленные в щеткодержателях. Через щетки и кольца
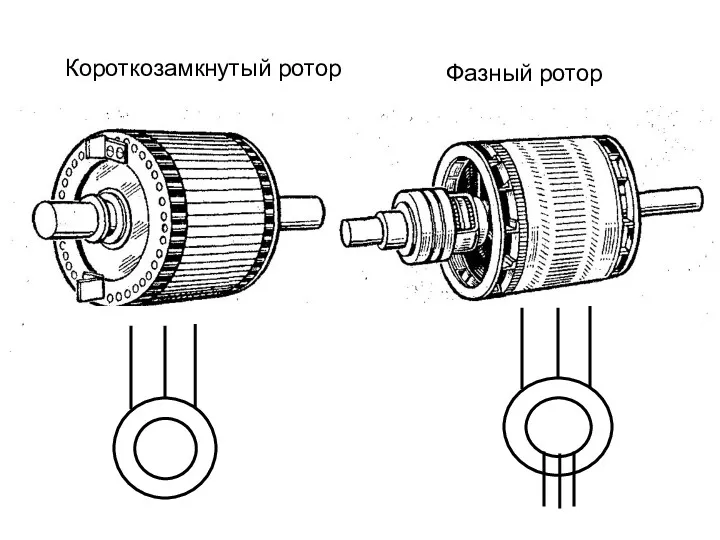
Короткозамкнутый ротор
Фазный ротор
Короткозамкнутый ротор
Фазный ротор
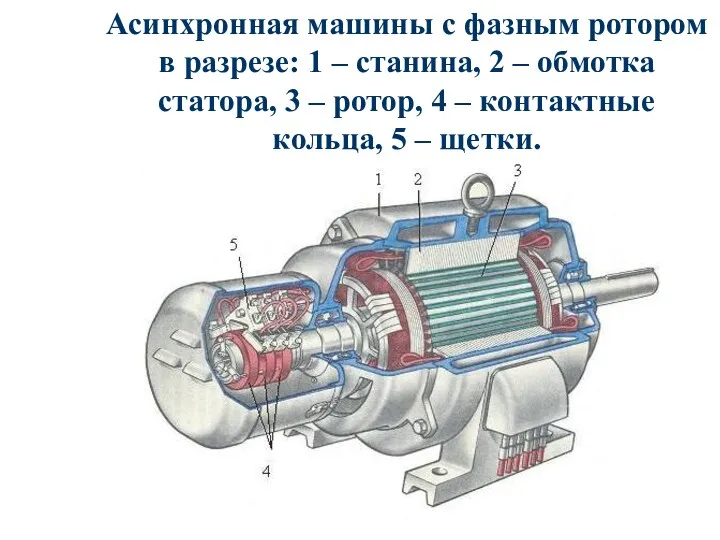
Асинхронная машины с фазным ротором в разрезе: 1 – станина, 2
Асинхронная машины с фазным ротором в разрезе: 1 – станина, 2

Коллекторный узел
Коллекторный узел
Устройство асинхронного двигателя:
Наиболее существенным недостатком является относительно низкий коэффициент мощности
Устройство асинхронного двигателя:
Наиболее существенным недостатком является относительно низкий коэффициент мощности
Устройство асинхронного двигателя:
В целях повышения коэффициента мощности асинхронных двигателей воздушный
Устройство асинхронного двигателя:
В целях повышения коэффициента мощности асинхронных двигателей воздушный
Статор
Создание вращающегося магнитного поля
Статор
Создание вращающегося магнитного поля
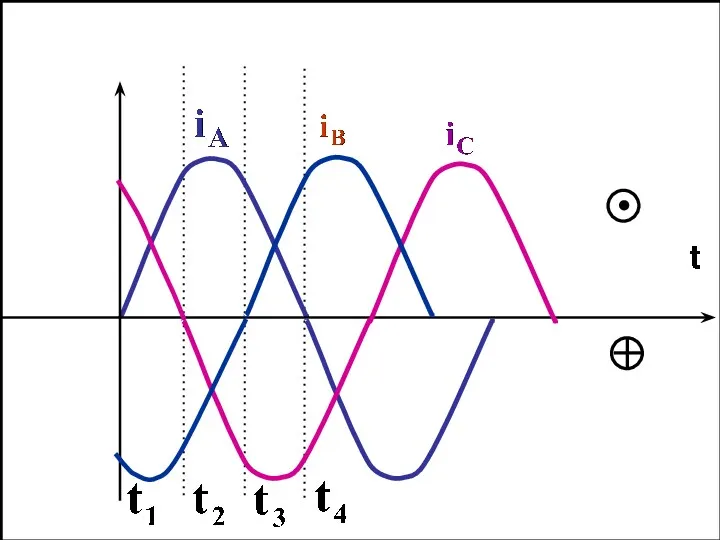
Выбираем моменты времени через одну шестую часть периода. Для каждого из
Выбираем моменты времени через одну шестую часть периода. Для каждого из
Ток в начале обмотки будем
считать направленным к нам,
если его
Ток в начале обмотки будем
считать направленным к нам,
если его
За период направление суммарного магнитного поля сделает один оборот. В этом
За период направление суммарного магнитного поля сделает один оборот. В этом
Таким образом, внутри статора существует постоянное по значению равномерно вращающееся магнитное
Таким образом, внутри статора существует постоянное по значению равномерно вращающееся магнитное
Если поменять любые две фазы местами, то изменится направление вращения магнитного
Если поменять любые две фазы местами, то изменится направление вращения магнитного
В этом случае частота вращения поля будет в 2 раза меньше,
В этом случае частота вращения поля будет в 2 раза меньше,

Частоты вращения магнитного поля
Частоты вращения магнитного поля
Режимы работы трехфазной асинхронной машины
Режим двигателя: на обмотку статора подается симметричная
Режимы работы трехфазной асинхронной машины
Режим двигателя: на обмотку статора подается симметричная
Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий
Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
В режиме
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
В режиме
Если на работающем двигателе ротор разогнать с помощью двигателя до
Если на работающем двигателе ротор разогнать с помощью двигателя до
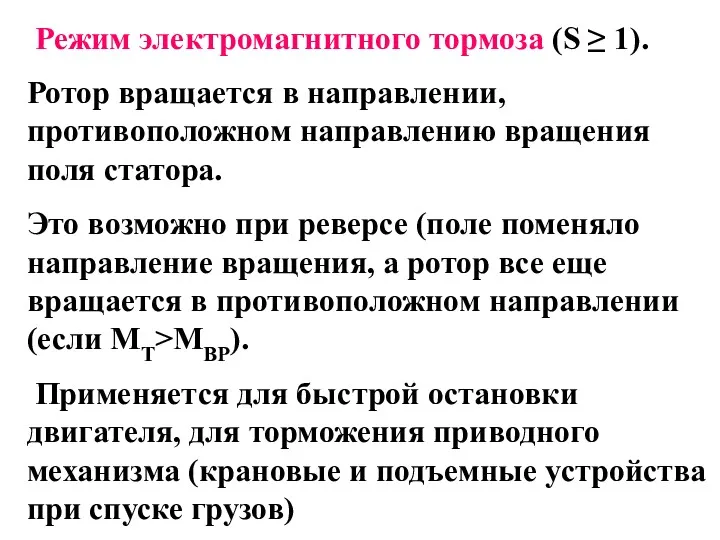
Режим электромагнитного тормоза (S ≥ 1).
Ротор вращается в направлении,
Режим электромагнитного тормоза (S ≥ 1).
Ротор вращается в направлении,
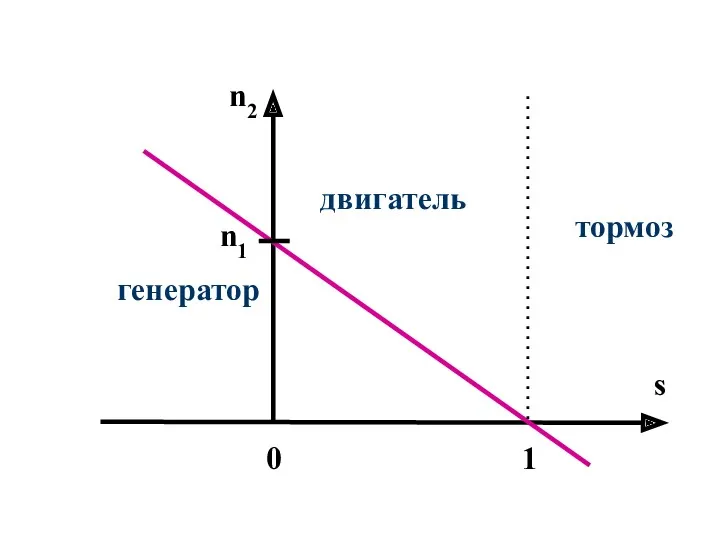
двигатель
генератор
тормоз
двигатель
генератор
тормоз
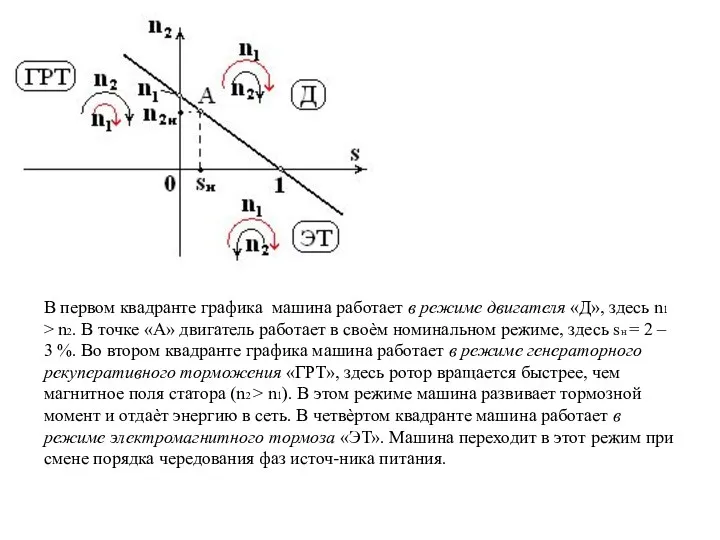
В первом квадранте графика машина работает в режиме двигателя «Д», здесь
В первом квадранте графика машина работает в режиме двигателя «Д», здесь
Влияние скольжения на работу асинхронных машин
Работающие под нагрузкой АД имеет: n1=const,
Влияние скольжения на работу асинхронных машин
Работающие под нагрузкой АД имеет: n1=const,
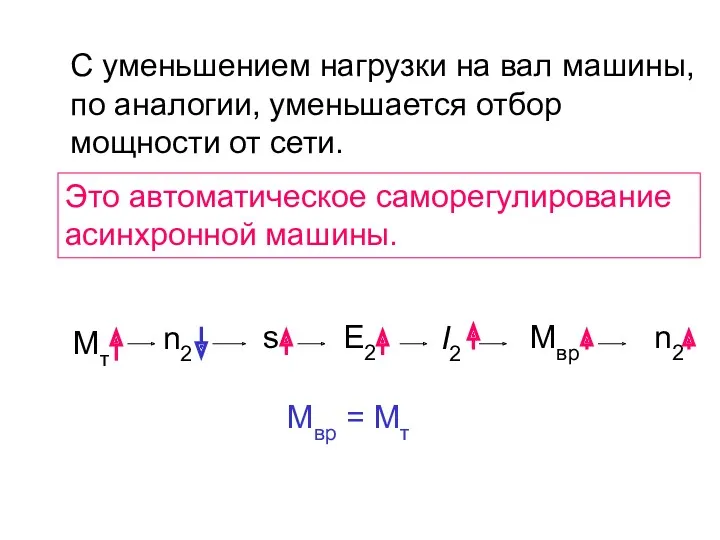
С уменьшением нагрузки на вал машины,
по аналогии, уменьшается отбор
мощности от
С уменьшением нагрузки на вал машины,
по аналогии, уменьшается отбор
мощности от
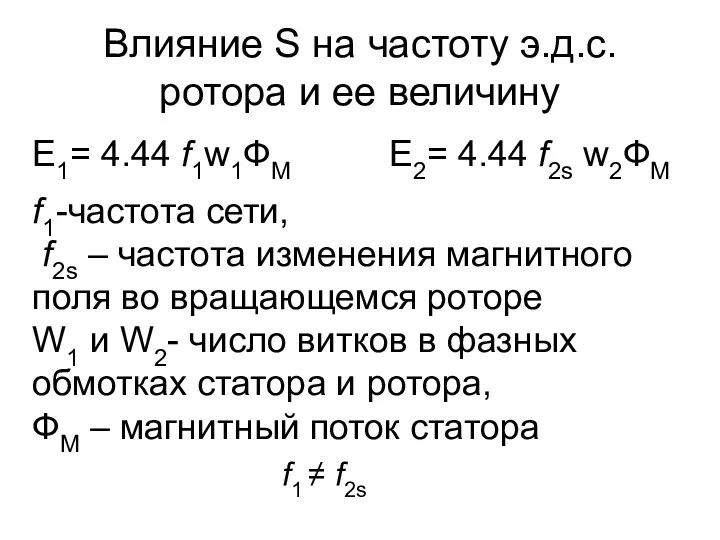
Влияние S на частоту э.д.с. ротора и ее величину
E1= 4.44
Влияние S на частоту э.д.с. ротора и ее величину
E1= 4.44
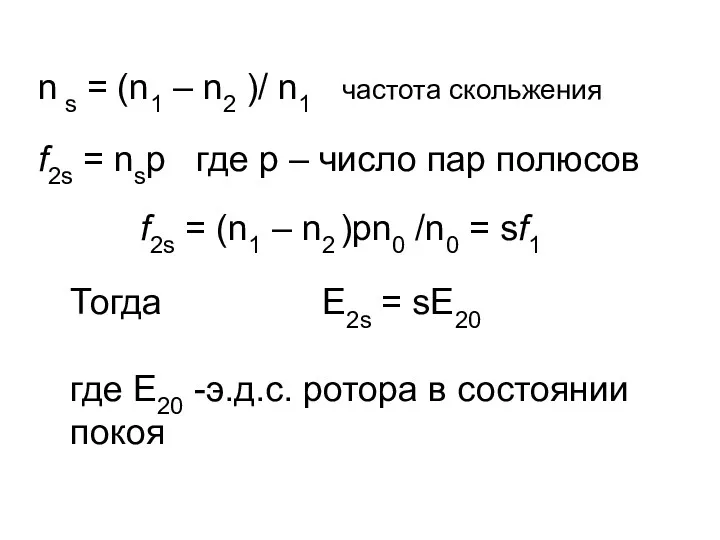
n s = (n1 – n2 )/ n1 частота скольжения
f2s =
n s = (n1 – n2 )/ n1 частота скольжения
f2s =
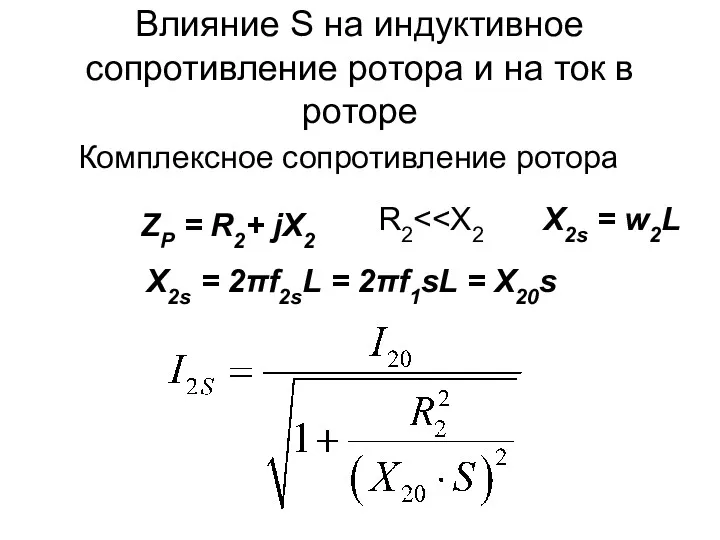
Влияние S на индуктивное сопротивление ротора и на ток в роторе
Комплексное
Влияние S на индуктивное сопротивление ротора и на ток в роторе
Комплексное
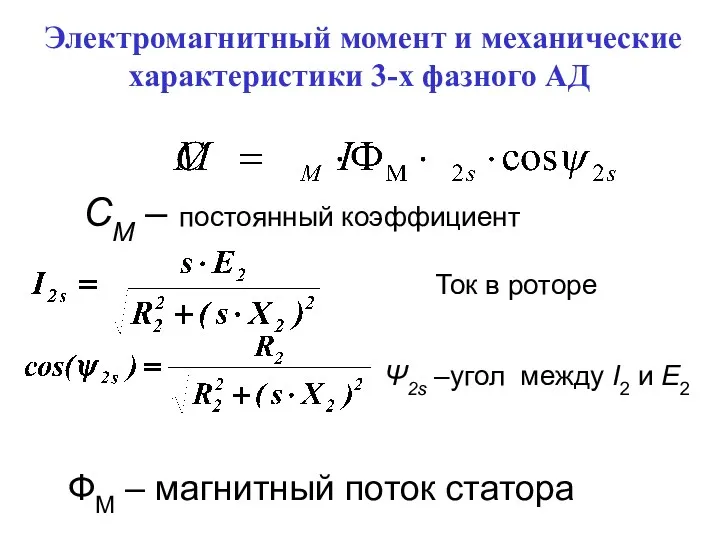
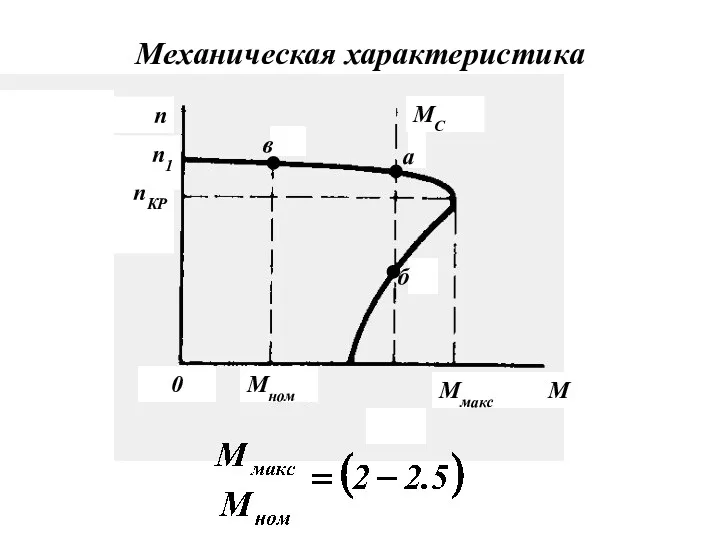
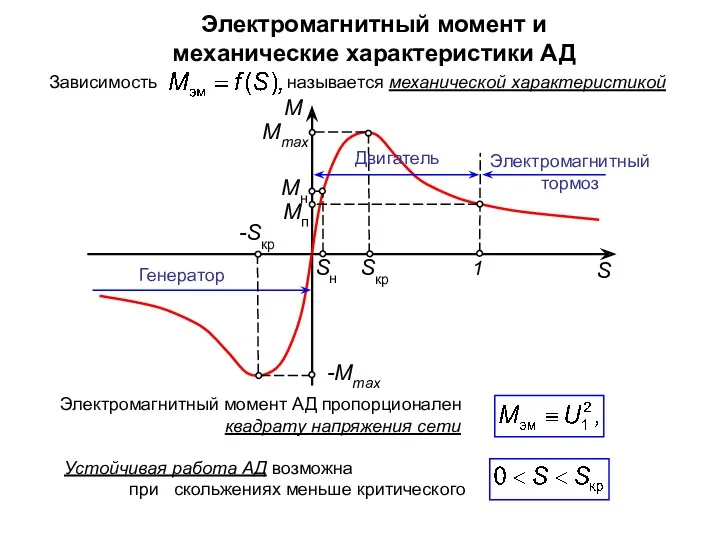
Электромагнитный момент и механические характеристики 3-х фазного АД
CМ – постоянный
Электромагнитный момент и механические характеристики 3-х фазного АД
CМ – постоянный
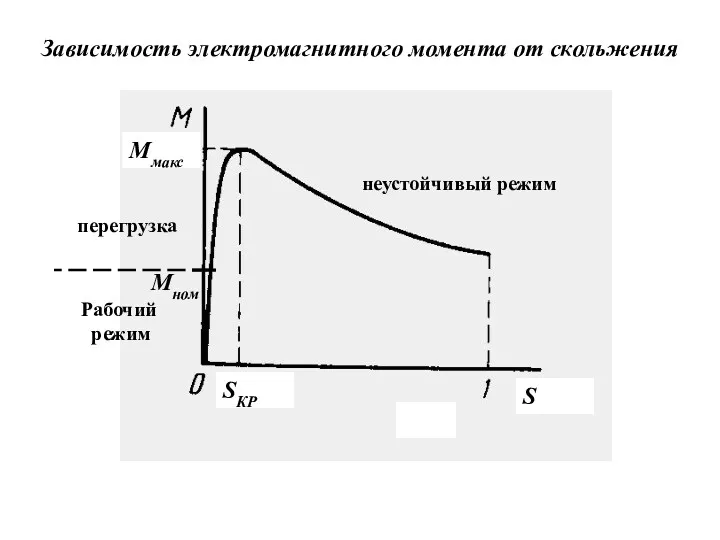
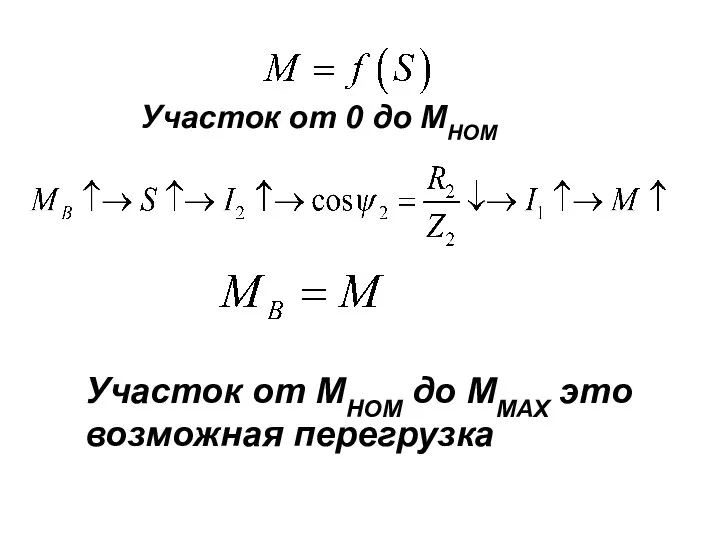
Участок от 0 до МНОМ
Участок от МНОМ до ММАХ это возможная
Участок от 0 до МНОМ
Участок от МНОМ до ММАХ это возможная
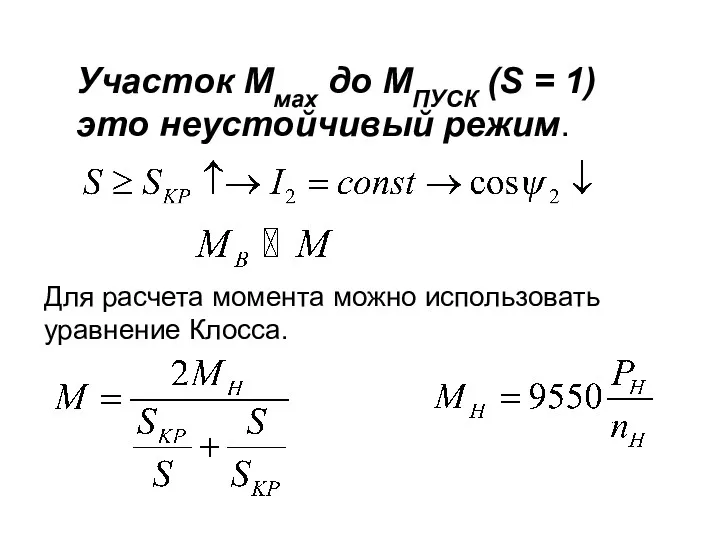
Участок Ммах до МПУСК (S = 1) это неустойчивый режим.
Для расчета
Участок Ммах до МПУСК (S = 1) это неустойчивый режим.
Для расчета
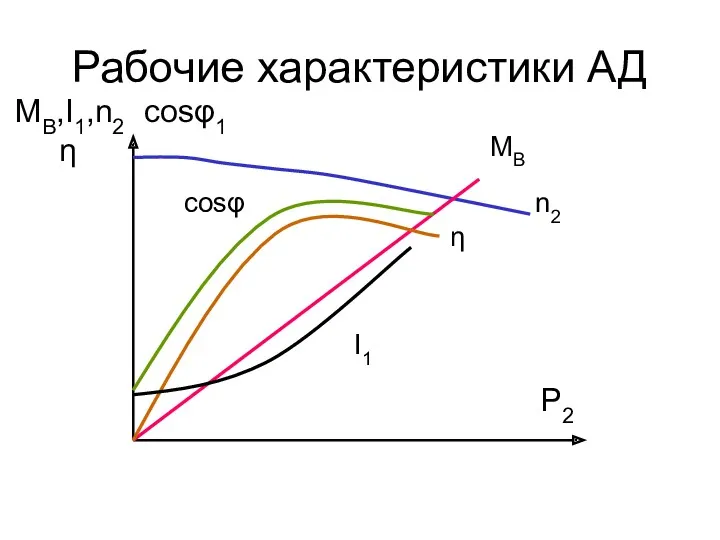
Рабочие характеристики АД
MB,I1,n2
cosφ1
P2
MB
n2
η
cosφ
I1
η
Рабочие характеристики АД
MB,I1,n2
cosφ1
P2
MB
n2
η
cosφ
I1
η
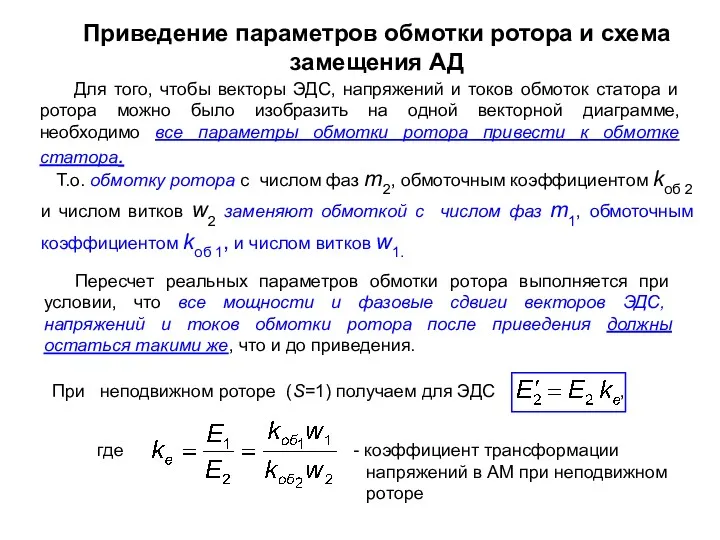
Приведение параметров обмотки ротора и схема замещения АД
Для того, чтобы
Приведение параметров обмотки ротора и схема замещения АД
Для того, чтобы
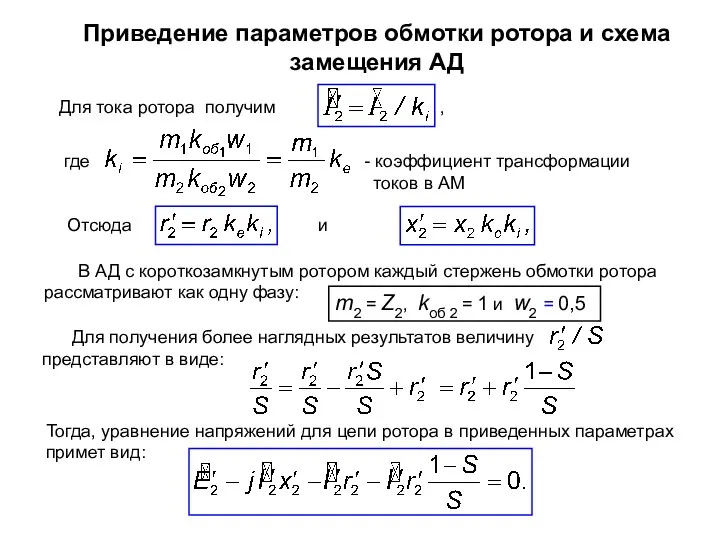
Приведение параметров обмотки ротора и схема замещения АД
Приведение параметров обмотки ротора и схема замещения АД
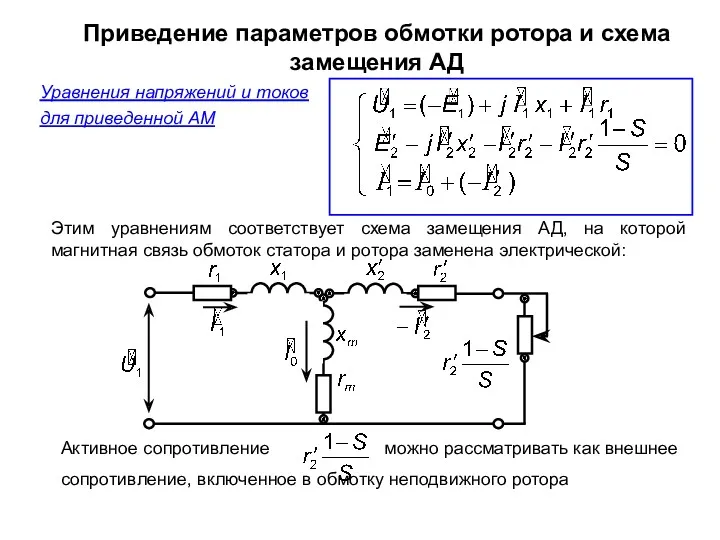
Этим уравнениям соответствует схема замещения АД, на которой магнитная связь обмоток
Этим уравнениям соответствует схема замещения АД, на которой магнитная связь обмоток
Приведение параметров обмотки ротора и схема замещения АД
АД аналогичен трансформатору, работающему
Приведение параметров обмотки ротора и схема замещения АД
АД аналогичен трансформатору, работающему
Приведение параметров обмотки ротора и схема замещения АД
Для того, чтобы
Приведение параметров обмотки ротора и схема замещения АД
Для того, чтобы
Электромагнитный момент и механические характеристики АД
следовательно, электромагнитный момент АД пропорционален мощности
Электромагнитный момент и механические характеристики АД
следовательно, электромагнитный момент АД пропорционален мощности
Электромагнитный момент и механические характеристики АД
Электромагнитный момент и механические характеристики АД
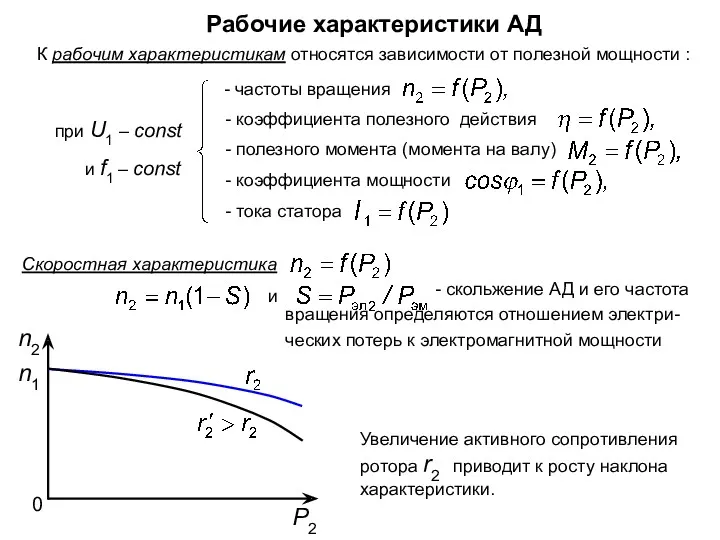
Рабочие характеристики АД
К рабочим характеристикам относятся зависимости от полезной мощности :
Увеличение
Рабочие характеристики АД
К рабочим характеристикам относятся зависимости от полезной мощности :
Увеличение
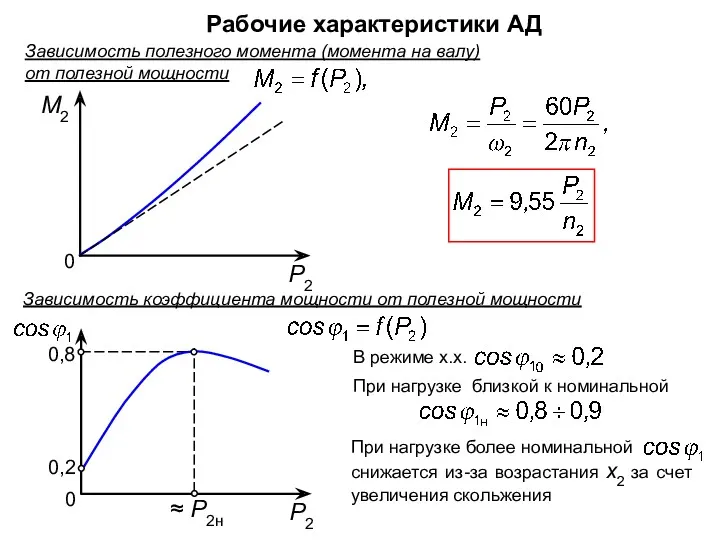
Рабочие характеристики АД
Рабочие характеристики АД
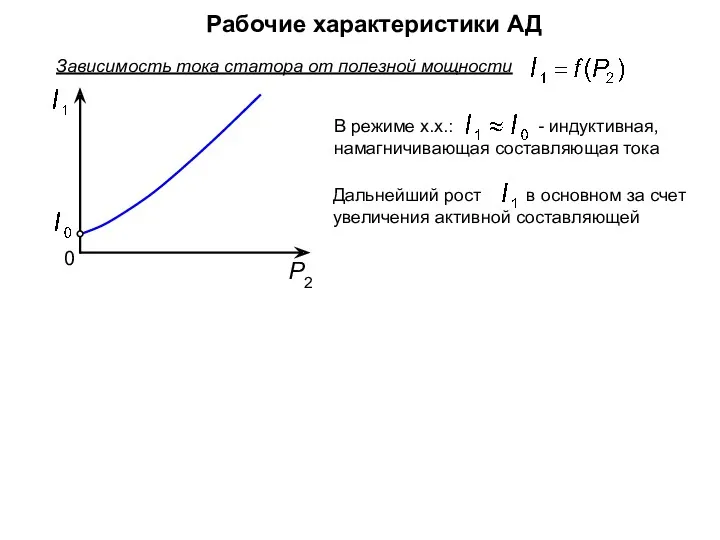
Рабочие характеристики АД
Рабочие характеристики АД
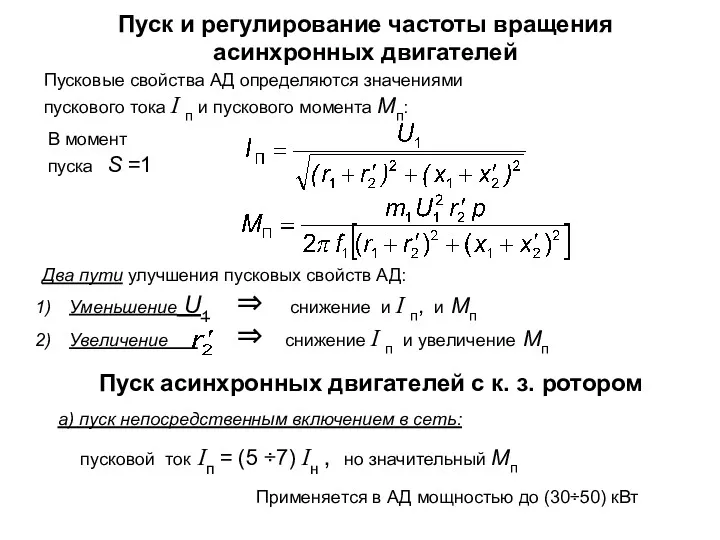
Пуск и регулирование частоты вращения асинхронных двигателей
Пусковые свойства АД определяются значениями
Пуск и регулирование частоты вращения асинхронных двигателей
Пусковые свойства АД определяются значениями
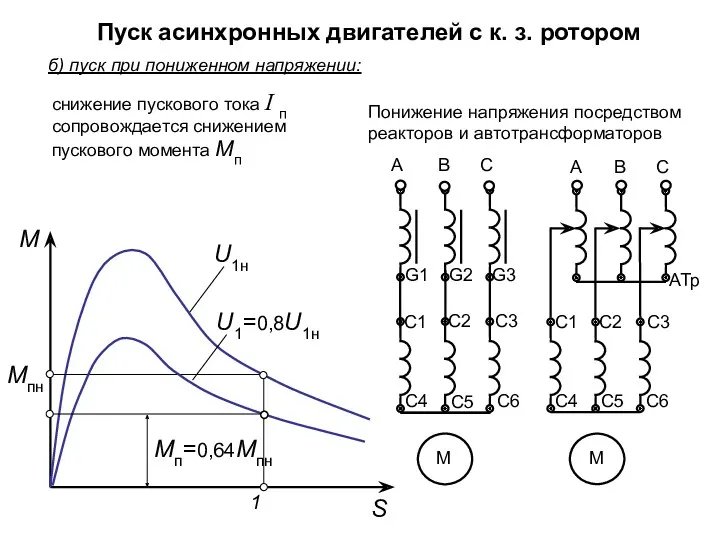
б) пуск при пониженном напряжении:
снижение пускового тока I п сопровождается снижением
б) пуск при пониженном напряжении:
снижение пускового тока I п сопровождается снижением
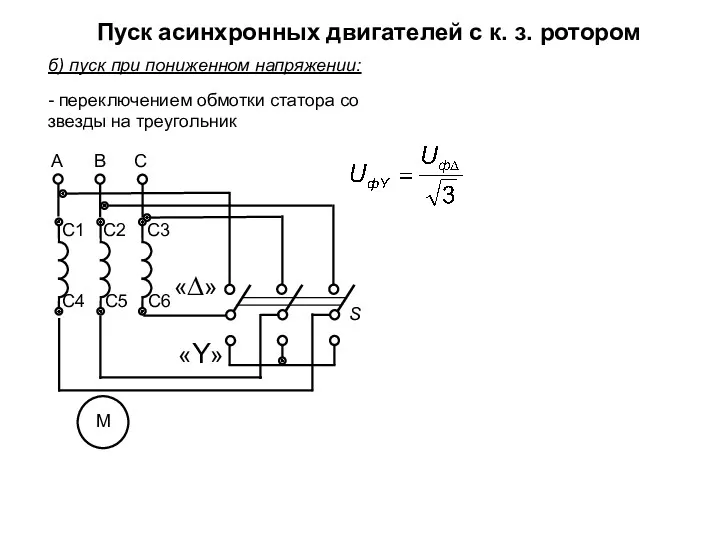
- переключением обмотки статора со звезды на треугольник
б) пуск при пониженном
- переключением обмотки статора со звезды на треугольник
б) пуск при пониженном
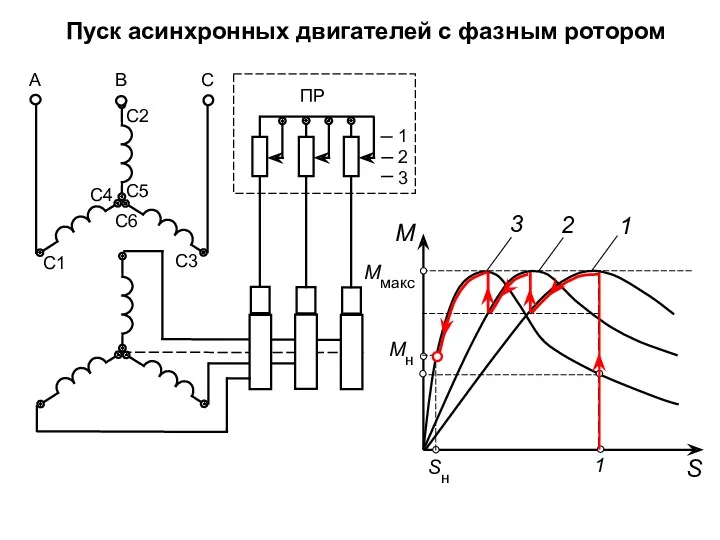
Пуск асинхронных двигателей с фазным ротором
Пуск асинхронных двигателей с фазным ротором
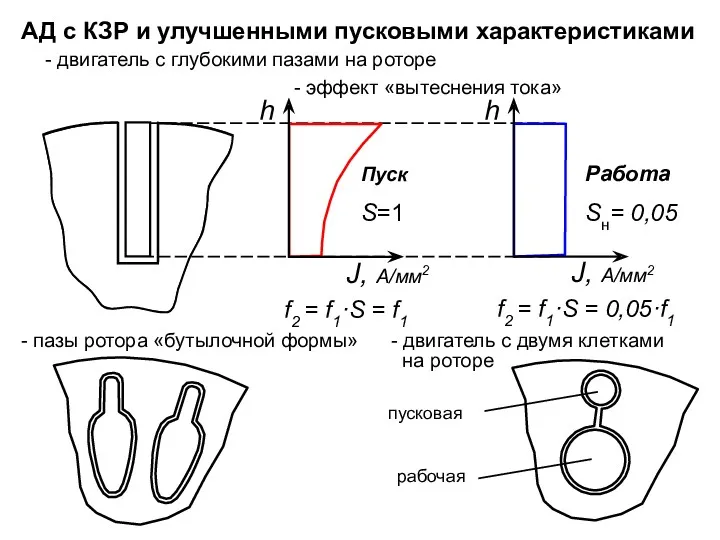
АД с КЗР и улучшенными пусковыми характеристиками
- двигатель с глубокими
АД с КЗР и улучшенными пусковыми характеристиками
- двигатель с глубокими
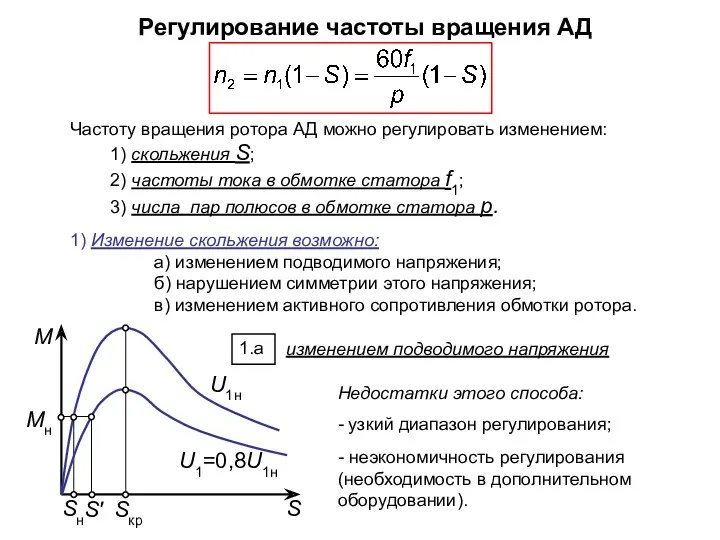
Регулирование частоты вращения АД
Частоту вращения ротора АД можно регулировать изменением:
1)
Регулирование частоты вращения АД
Частоту вращения ротора АД можно регулировать изменением:
1)
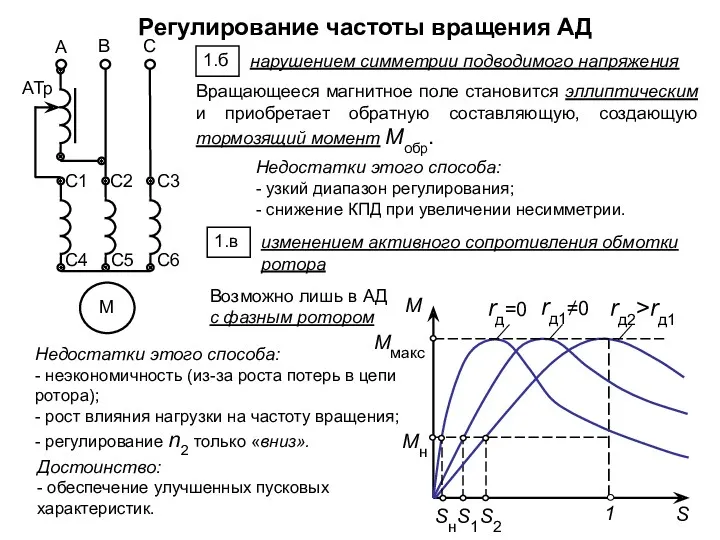
Регулирование частоты вращения АД
Вращающееся магнитное поле становится эллиптическим и приобретает обратную
Регулирование частоты вращения АД
Вращающееся магнитное поле становится эллиптическим и приобретает обратную
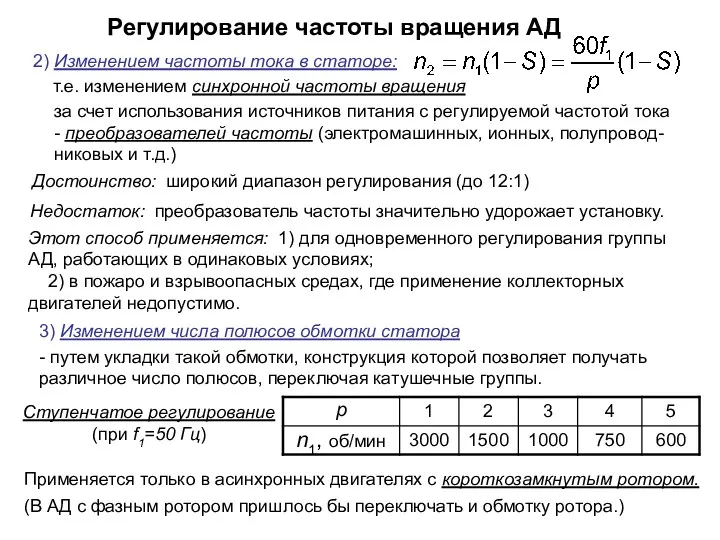
Регулирование частоты вращения АД
за счет использования источников питания с регулируемой частотой
Регулирование частоты вращения АД
за счет использования источников питания с регулируемой частотой
Пуск 3-х фазного АД в ход
Пусковые свойства определяются величинами:
Пуск 3-х фазного АД в ход
Пусковые свойства определяются величинами:
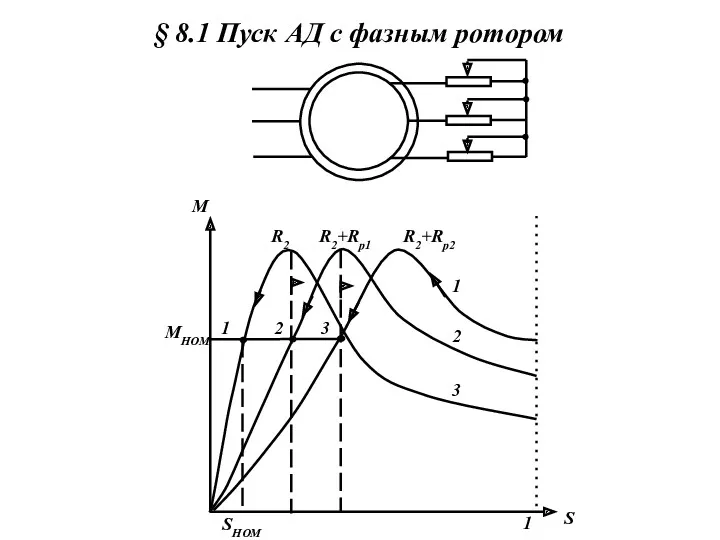
§ 8.1 Пуск АД с фазным ротором
§ 8.1 Пуск АД с фазным ротором
Пуск АД с короткозамкнутым ротором
Прямой пуск. Применим для АД
Пуск АД с короткозамкнутым ротором
Прямой пуск. Применим для АД
Пуск при пониженном напряжении.
Для уменьшения Iпуск на время понижают напряжение
Пуск при пониженном напряжении.
Для уменьшения Iпуск на время понижают напряжение
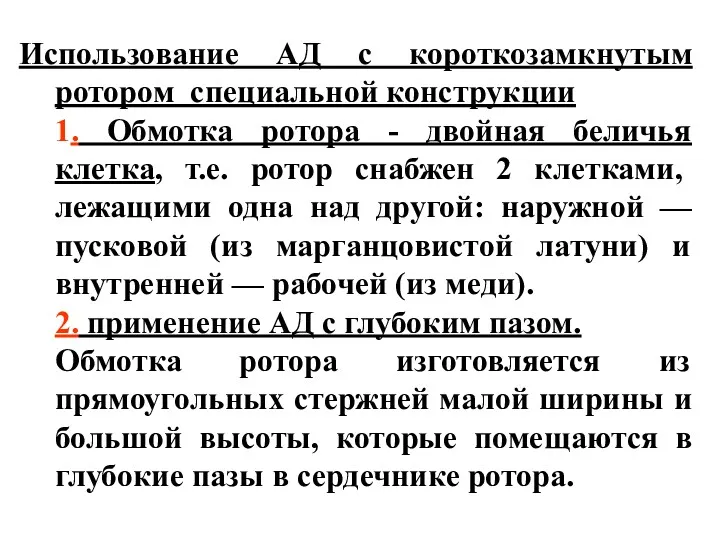
Использование АД с короткозамкнутым ротором специальной конструкции
1. Обмотка ротора -
Использование АД с короткозамкнутым ротором специальной конструкции
1. Обмотка ротора -
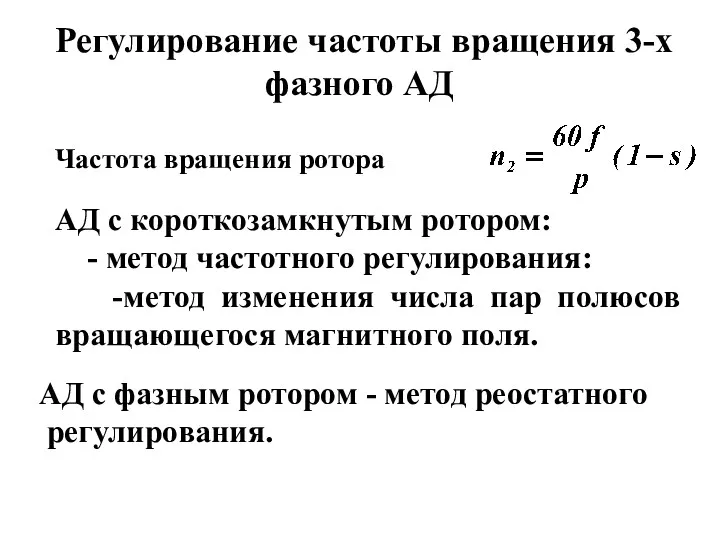
Регулирование частоты вращения 3-х фазного АД
Частота вращения ротора
АД
Регулирование частоты вращения 3-х фазного АД
Частота вращения ротора
АД
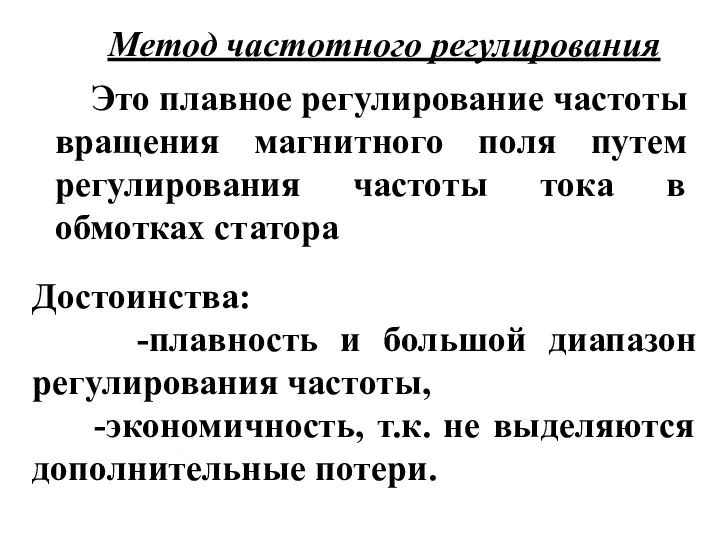
Метод частотного регулирования
Это плавное регулирование частоты вращения магнитного поля путем
Метод частотного регулирования
Это плавное регулирование частоты вращения магнитного поля путем

Схема включения АД с частотным регулированием скорости
Схема включения АД с частотным регулированием скорости
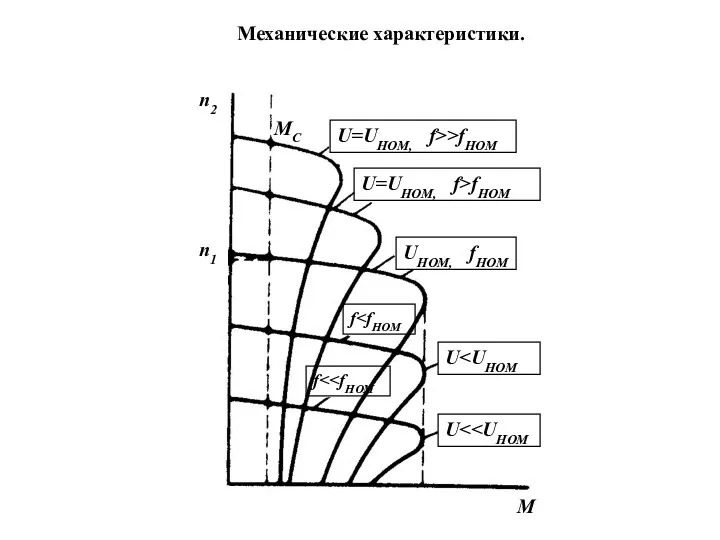
Механические характеристики.
Механические характеристики.
Метод изменения числа пар полюсов
Основан на изменении числа пар полюсов
Метод изменения числа пар полюсов
Основан на изменении числа пар полюсов
Метод реостатного регулирования
Применяется у АД с фазным ротором.
В цепь
Метод реостатного регулирования
Применяется у АД с фазным ротором.
В цепь
Комплексная мощность трехфазного асинхронного двигателя
где
активная и реактивная мощности двигателя
Комплексная мощность трехфазного асинхронного двигателя
где
активная и реактивная мощности двигателя
Активная мощность определяет среднюю мощность необратимого преобразования электрической энергии в механическую,
Активная мощность определяет среднюю мощность необратимого преобразования электрической энергии в механическую,
Коэффициент полезного действия АД
Р2 - полезная мощность на валу
Р1 – мощность
Коэффициент полезного действия АД
Р2 - полезная мощность на валу
Р1 – мощность
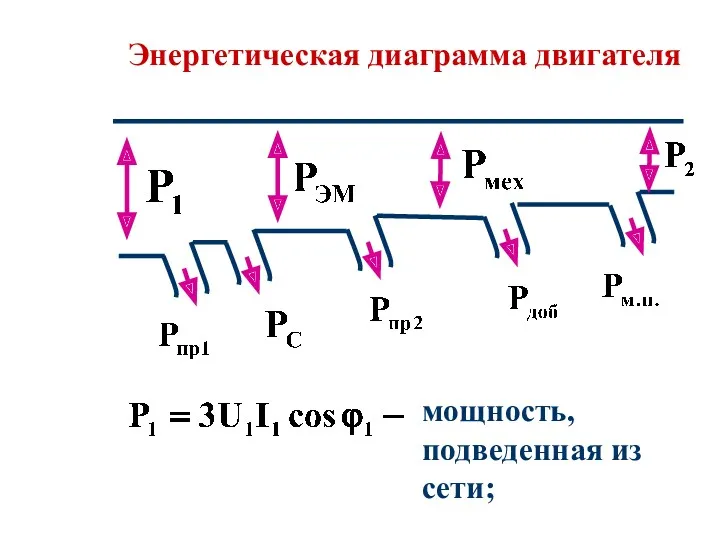
Энергетическая диаграмма двигателя
Энергетическая диаграмма двигателя
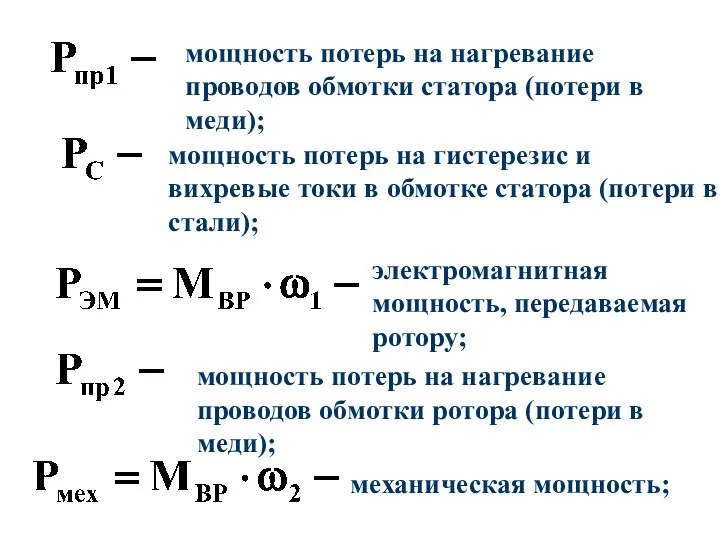
мощность потерь на нагревание проводов обмотки статора (потери в меди);
мощность потерь
мощность потерь на нагревание проводов обмотки статора (потери в меди);
мощность потерь
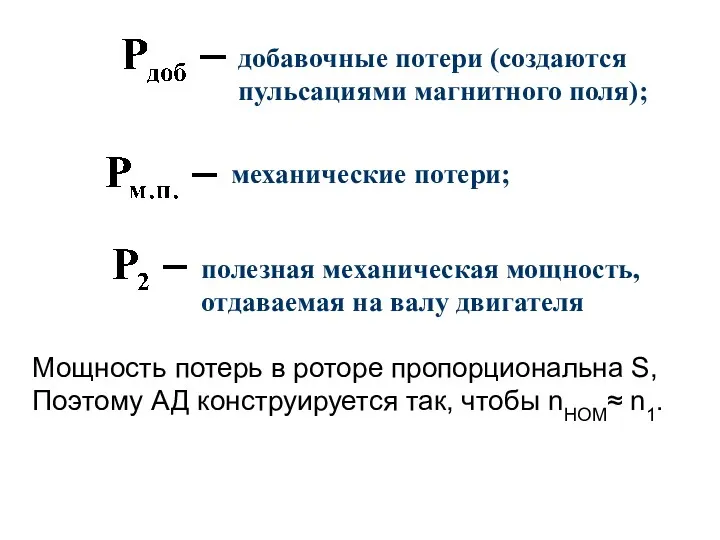
добавочные потери (создаются пульсациями магнитного поля);
механические потери;
полезная механическая мощность, отдаваемая
добавочные потери (создаются пульсациями магнитного поля);
механические потери;
полезная механическая мощность, отдаваемая
Однофазные и конденсаторные асинхронные двигатели
Принцип действия однофазного АД
Устройство однофазного АД:
Однофазные и конденсаторные асинхронные двигатели
Принцип действия однофазного АД
Устройство однофазного АД:
Однофазные и конденсаторные асинхронные двигатели
Следовательно, частота токов в роторе, наведенных
Однофазные и конденсаторные асинхронные двигатели
Следовательно, частота токов в роторе, наведенных
Однофазные и конденсаторные асинхронные двигатели
Для создания пускового момента необходимо во
Однофазные и конденсаторные асинхронные двигатели
Для создания пускового момента необходимо во
 Кислородсодержащие органические вещества
Кислородсодержащие органические вещества Создание теста через программу MyTest
Создание теста через программу MyTest Физические свойства Металлов
Физические свойства Металлов Организация помощи при автодорожной травме. Осмотр
Организация помощи при автодорожной травме. Осмотр Стресс в профессиональной деятельности: причины и методы преодоления
Стресс в профессиональной деятельности: причины и методы преодоления С днем рождения
С днем рождения Изготовление домашнего халата
Изготовление домашнего халата Деление обыкновенных дробей
Деление обыкновенных дробей Егіз ұрықпен босанушы әйелдерде босанғаннан кейін қан кетудің алдын алу
Егіз ұрықпен босанушы әйелдерде босанғаннан кейін қан кетудің алдын алу ВКР: Цифровий термометр на мікроконтролері PIC16f628a
ВКР: Цифровий термометр на мікроконтролері PIC16f628a Зимующие птицы
Зимующие птицы Родительское собрание О подростковом возрасте
Родительское собрание О подростковом возрасте жизнь возле свалки
жизнь возле свалки История троллейбуса БТЗ-5276-04
История троллейбуса БТЗ-5276-04 Litania do Dzieciątka Jezus
Litania do Dzieciątka Jezus Фруктовое пиво - новый тренд? Что нам с этим делать?
Фруктовое пиво - новый тренд? Что нам с этим делать? Синдром раздраженного кишечника
Синдром раздраженного кишечника Гипотоническая болезнь. Коллапс
Гипотоническая болезнь. Коллапс Мюзикл Норд - Ост, по роману Вениамина Каверина Два капитана
Мюзикл Норд - Ост, по роману Вениамина Каверина Два капитана Вимірювання потужності. Вимірювачі іімпульсної, середньої і великої потужності. (Тема 11.3)
Вимірювання потужності. Вимірювачі іімпульсної, середньої і великої потужності. (Тема 11.3) Урок по краеведению климат Карабаша
Урок по краеведению климат Карабаша Плюсы и минусы дистанционного образования
Плюсы и минусы дистанционного образования Конспект урока географии 6 класс Биосфера – сфера жизни Центры происхождения культурных растений (на основе системно-деятельностного подхода) Учебник: География.5-6 класс. Авторы: А.И.Алексеев, Е.К.Липкина В.В.Николина;
Конспект урока географии 6 класс Биосфера – сфера жизни Центры происхождения культурных растений (на основе системно-деятельностного подхода) Учебник: География.5-6 класс. Авторы: А.И.Алексеев, Е.К.Липкина В.В.Николина; terapiya ppt
terapiya ppt Природа Новосибирской области. Урок-игра
Природа Новосибирской области. Урок-игра Система маслоснабжения генератора
Система маслоснабжения генератора Компания ЗапСибЛогистика
Компания ЗапСибЛогистика 22 июня 1941 год
22 июня 1941 год