- Точное земледелие: научный подход

Содержание
- 2. Технологии точного земледелия Основные составляющие технологий ТЗ: Точное позиционирование в пространстве; Геоинформационные системы; Детальное описание полевых
- 3. Поражения посевов: существенный фактор потери урожайности с/х культур Разработка научных основ мониторинга поражения посевов в результате
- 4. Интеграционный проект СО РАН «Разработка цифровых технологий раннего обнаружения и локализации поражений посевов сельскохозяйственных культур» Цель
- 5. LandSat Институт вычислительных технологий СО РАН: Сервис-ориентированная геоинформационная система На примере анализа каталогов спутниковых данных полученных
- 6. Институт автоматики и электрометрии СО РАН: Автоматический анализ гиперспектральных изображений Для анализа цифровых изображений с разрешением
- 7. Институт автоматики и электрометрии СО РАН: управление в робототехнических системах Апробированы методики решения задач управления мобильными
- 8. Институт цитологии и генетики СО РАН: новые технологии создания устойчивых сортов с/х культур В ИЦиГ СО
- 9. Сибирский федеральный научный центр агробиотехнологий РАН: информатизация земледелия Создан комплекс методик и информационных продуктов: автоматизированных рабочих
- 10. Интеграция ресурсов институтов СО РАН в рамках проекта для создания многоуровневой системы мониторинга посевов Многоуровневая система
- 12. Скачать презентацию

Технологии точного земледелия
Основные составляющие технологий ТЗ:
Точное позиционирование в пространстве;
Геоинформационные системы;
Детальное
Технологии точного земледелия
Основные составляющие технологий ТЗ:
Точное позиционирование в пространстве;
Геоинформационные системы;
Детальное

Поражения посевов: существенный фактор потери урожайности с/х культур
Разработка научных основ
Поражения посевов: существенный фактор потери урожайности с/х культур
Разработка научных основ
Интеграционный проект СО РАН
«Разработка цифровых технологий раннего обнаружения и локализации поражений
Интеграционный проект СО РАН
«Разработка цифровых технологий раннего обнаружения и локализации поражений

LandSat
Институт вычислительных технологий СО РАН:
Сервис-ориентированная геоинформационная система
На примере анализа каталогов
LandSat
Институт вычислительных технологий СО РАН:
Сервис-ориентированная геоинформационная система
На примере анализа каталогов
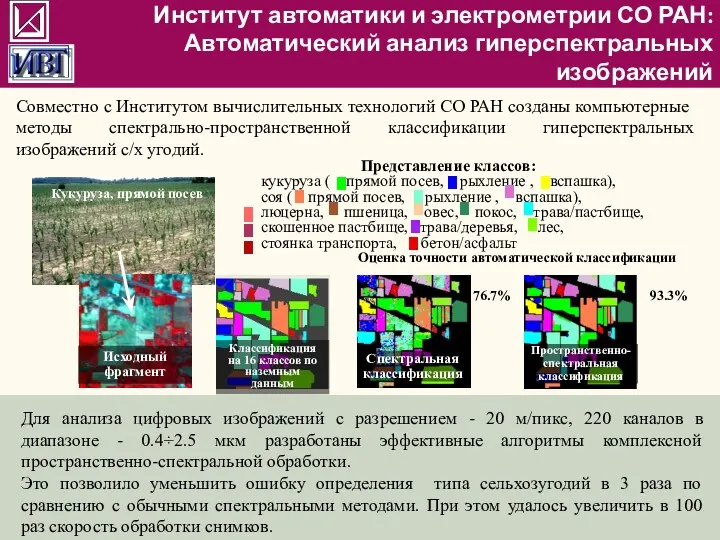
Институт автоматики и электрометрии СО РАН:
Автоматический анализ гиперспектральных изображений
Для анализа цифровых
Институт автоматики и электрометрии СО РАН:
Автоматический анализ гиперспектральных изображений
Для анализа цифровых

Институт автоматики и электрометрии СО РАН:
управление в робототехнических системах
Апробированы методики решения
Институт автоматики и электрометрии СО РАН:
управление в робототехнических системах
Апробированы методики решения

Институт цитологии и генетики СО РАН:
новые технологии создания устойчивых сортов с/х
Институт цитологии и генетики СО РАН:
новые технологии создания устойчивых сортов с/х
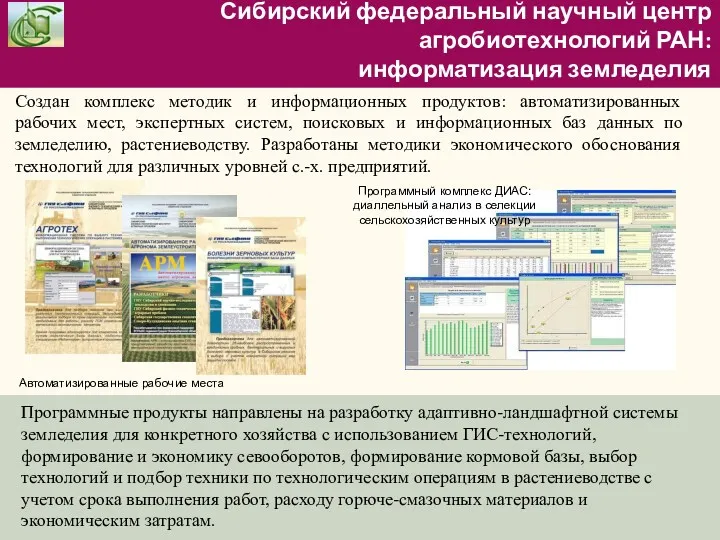
Сибирский федеральный научный центр агробиотехнологий РАН:
информатизация земледелия
Создан комплекс методик и
Сибирский федеральный научный центр агробиотехнологий РАН:
информатизация земледелия
Создан комплекс методик и

Интеграция ресурсов институтов СО РАН в рамках проекта
для создания многоуровневой системы
Интеграция ресурсов институтов СО РАН в рамках проекта
для создания многоуровневой системы
 Украшение интерьера
Украшение интерьера Чтение лекций взрослой аудитории
Чтение лекций взрослой аудитории Разработка классного часа тема 1 сентября
Разработка классного часа тема 1 сентября Определение высоты здания насосной станции
Определение высоты здания насосной станции журнал для родителей Советы логопеда выпуск 2
журнал для родителей Советы логопеда выпуск 2 Краткая характеристика объекта и района строительства. Расчет и конструирование системы отопления и систем вентиляции здания
Краткая характеристика объекта и района строительства. Расчет и конструирование системы отопления и систем вентиляции здания Súper presentación de la historia de los metamorfos alv
Súper presentación de la historia de los metamorfos alv Организация работы специализированных (бит) и линейных бригад скорой помощи
Организация работы специализированных (бит) и линейных бригад скорой помощи Профессии моих родителей
Профессии моих родителей Тесты
Тесты Jonathan Swift (1667 -1745)
Jonathan Swift (1667 -1745) О перспективах строительства объектов дорожной инфраструктуры города
О перспективах строительства объектов дорожной инфраструктуры города Двенадцать шагов для родителей будущего первоклассника
Двенадцать шагов для родителей будущего первоклассника Наследование. Общие положения, наследование по завещанию и закону
Наследование. Общие положения, наследование по завещанию и закону Голубь из атласных лент
Голубь из атласных лент Звук. Характеристики звука. Акустический резонанс. Эхо. Ультразвук
Звук. Характеристики звука. Акустический резонанс. Эхо. Ультразвук Навыки персональной безопасности
Навыки персональной безопасности Химические уравнения
Химические уравнения Открытый урок в 5 классе
Открытый урок в 5 классе Экономика России: прошлое, настоящее, будущее
Экономика России: прошлое, настоящее, будущее Архитектура гражданских и промышленных зданий. Перекрытия зданий КПД. (Тема 3-4)
Архитектура гражданских и промышленных зданий. Перекрытия зданий КПД. (Тема 3-4) Пропорция 6 класс
Пропорция 6 класс Арифметические и логические основы работы компьютера
Арифметические и логические основы работы компьютера Проект По следам рудознатцев
Проект По следам рудознатцев Наполняем ваш каталог качественными описаниями товаров
Наполняем ваш каталог качественными описаниями товаров Негосударственные пенсионные фонды
Негосударственные пенсионные фонды Световозвращающие элементы
Световозвращающие элементы Сборка и монтаж печатной платы в соответствии с разработанной документацией
Сборка и монтаж печатной платы в соответствии с разработанной документацией