- Трехфазные асинхронные двигатели

Содержание
- 2. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2,
- 3. СКОЛЬЖЕНИЕ Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения
- 4. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс.
- 5. РИС. 1. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ ДВИГАТЕЛЯ
- 6. ЗАВИСИМОСТЬ ПОЛЕЗНОГО МОМЕНТА (МОМЕНТА НА ВАЛУ) ОТ ПОЛЕЗНОЙ МОЩНОСТИ Зависимость М2 =f(P2). Зависимость полезного момента на
- 7. Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую
- 8. В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для
- 9. РИС. 2. ВЕКТОРНАЯ ДИАГРАММА АД ПРИ НЕБОЛЬШОЙ НАГРУЗКЕ ЗАВИСИМОСТЬ COS Φ1 = F (P2). Т.к. ток
- 10. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая
- 11. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если двигатель работает значительную часть времени недогруженным,
- 12. На рис. 3 представлены графики зависимости cos φ1, АД от нагрузки при соединении обмоток статора звездой
- 14. Скачать презентацию
РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости
РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости
СКОЛЬЖЕНИЕ
Скольжение s = Pэ2/Pэм,
т. е. скольжение асинхронного двигателя, а следовательно,
СКОЛЬЖЕНИЕ
Скольжение s = Pэ2/Pэм,
т. е. скольжение асинхронного двигателя, а следовательно,
В соответствии с этим зависимость n2 = f(P2) представляет собой
В соответствии с этим зависимость n2 = f(P2) представляет собой
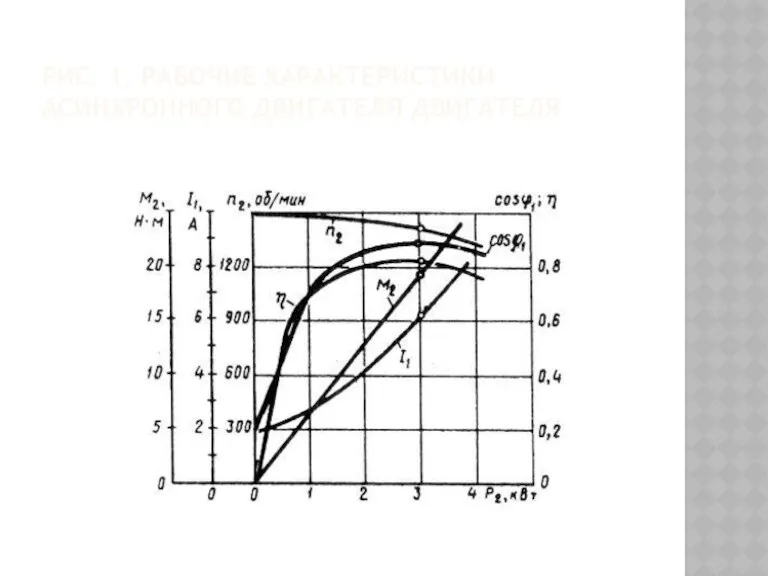
РИС. 1. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ ДВИГАТЕЛЯ
РИС. 1. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ ДВИГАТЕЛЯ
ЗАВИСИМОСТЬ ПОЛЕЗНОГО МОМЕНТА (МОМЕНТА НА ВАЛУ) ОТ ПОЛЕЗНОЙ МОЩНОСТИ
Зависимость М2 =f(P2).
ЗАВИСИМОСТЬ ПОЛЕЗНОГО МОМЕНТА (МОМЕНТА НА ВАЛУ) ОТ ПОЛЕЗНОЙ МОЩНОСТИ
Зависимость М2 =f(P2).
Из этого выражения следует, что если
n2 = const,
Из этого выражения следует, что если
n2 = const,
В связи с тем что ток статора асинхронного двигателя I1
В связи с тем что ток статора асинхронного двигателя I1
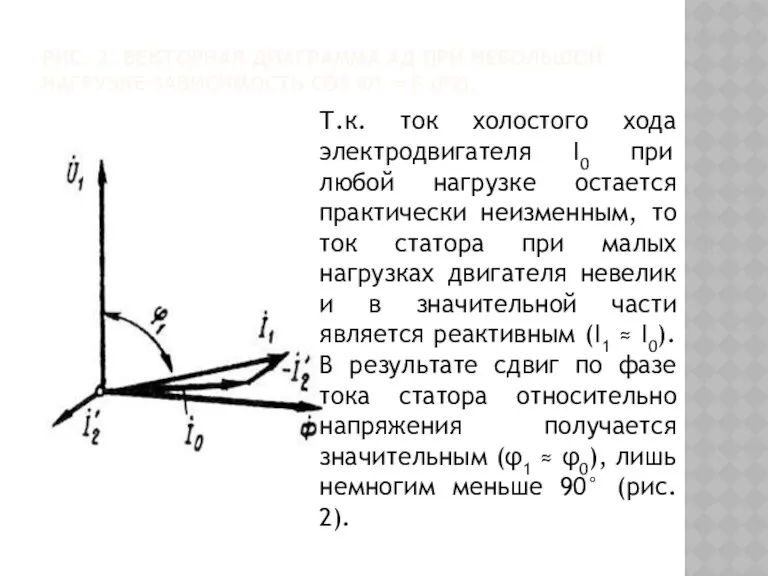
РИС. 2. ВЕКТОРНАЯ ДИАГРАММА АД ПРИ НЕБОЛЬШОЙ НАГРУЗКЕ ЗАВИСИМОСТЬ COS Φ1
РИС. 2. ВЕКТОРНАЯ ДИАГРАММА АД ПРИ НЕБОЛЬШОЙ НАГРУЗКЕ ЗАВИСИМОСТЬ COS Φ1
При увеличении нагрузки на валу двигателя растет активная составляющая тока
При увеличении нагрузки на валу двигателя растет активная составляющая тока
Это можно обеспечить лишь при правильном выборе мощности двигателя. Если
Это можно обеспечить лишь при правильном выборе мощности двигателя. Если
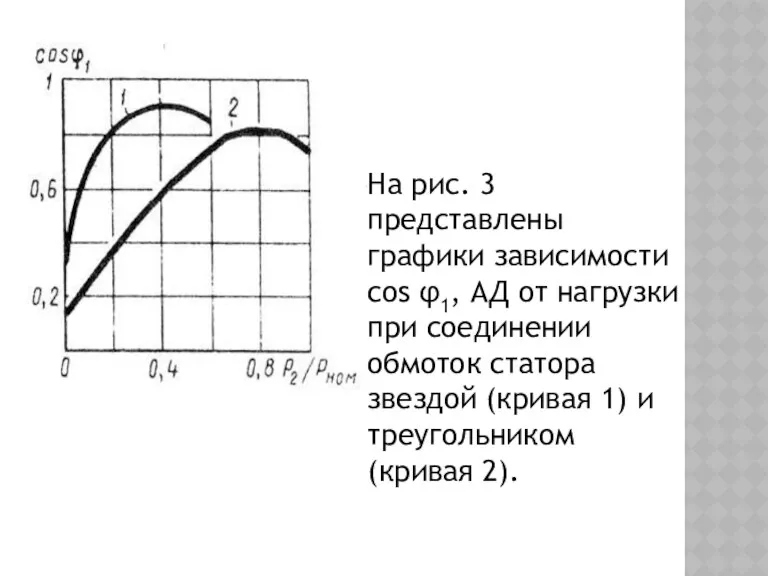
На рис. 3 представлены графики зависимости cos φ1, АД от
На рис. 3 представлены графики зависимости cos φ1, АД от
 Конспект комплексного занятия по обогащению лексико-грамматического компонента речи в младшей группе для детей с ОНР по теме: Лето
Конспект комплексного занятия по обогащению лексико-грамматического компонента речи в младшей группе для детей с ОНР по теме: Лето Интеллектуальный марафон Химия и искусстводля 8-11 классов
Интеллектуальный марафон Химия и искусстводля 8-11 классов Материалы НПК (работа, презентация, приложение)
Материалы НПК (работа, презентация, приложение) Система крови. Состав и функция крови. Кровь и её компоненты
Система крови. Состав и функция крови. Кровь и её компоненты Моя родина – Южный Урал
Моя родина – Южный Урал Гингивиты у детей
Гингивиты у детей Революция. Типичные причины революции
Революция. Типичные причины революции Измерение вибрации и частоты вращения механизмов, физико-химических свойств и состава жидкостей и газов
Измерение вибрации и частоты вращения механизмов, физико-химических свойств и состава жидкостей и газов Урок по географии в 6 классе Масштаб(ФГОС ООО)
Урок по географии в 6 классе Масштаб(ФГОС ООО) Методика обучения английскому языку и деловой коммуникации
Методика обучения английскому языку и деловой коммуникации Взаимодействие органов управления, энергоснабжающих организаций и потребителей
Взаимодействие органов управления, энергоснабжающих организаций и потребителей Представление чисел в формате с плавающей запятой
Представление чисел в формате с плавающей запятой Лечение гриппа
Лечение гриппа Остеохондроз поясничного отдела
Остеохондроз поясничного отдела самопрезентация опыта Использование информационных технологий как средство повышения познавательной активности учащихся на уроках в начальной школе Диск
самопрезентация опыта Использование информационных технологий как средство повышения познавательной активности учащихся на уроках в начальной школе Диск Стандарты второго поколения. Технология 5-9 классы
Стандарты второго поколения. Технология 5-9 классы День матери
День матери Презентации моих учеников
Презентации моих учеников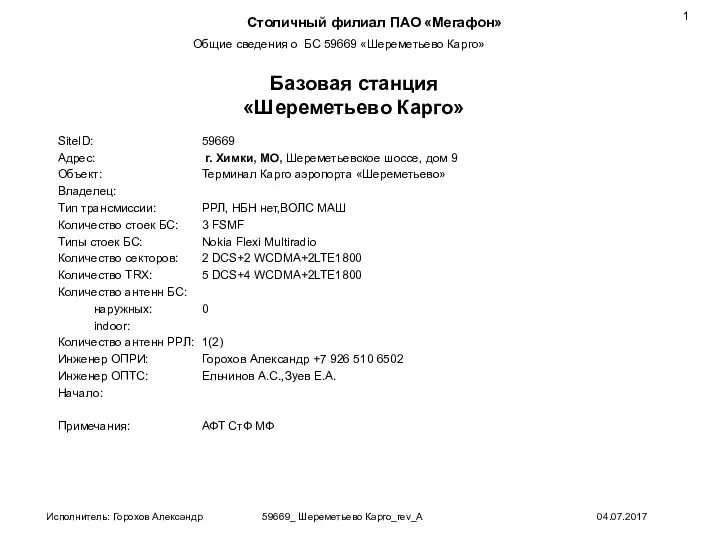 Базовая станция Шереметьево Карго
Базовая станция Шереметьево Карго Психологический кризис. Кризис 3-х лет
Психологический кризис. Кризис 3-х лет Основные производственные процессы в тепловодном карповом прудовом хозяйстве
Основные производственные процессы в тепловодном карповом прудовом хозяйстве Мотивация учения
Мотивация учения А.А. Фет и музыка (урок-концерт) 10 класс
А.А. Фет и музыка (урок-концерт) 10 класс Классный час Поселку Мостовскому 120 лет: помним,гордимся, наследуем
Классный час Поселку Мостовскому 120 лет: помним,гордимся, наследуем Мини-презентация Периодическая система Д.И. Менделеева
Мини-презентация Периодическая система Д.И. Менделеева Процессы и аппараты пищевых производств. (Лекция 4)
Процессы и аппараты пищевых производств. (Лекция 4) Фрактал. Три основные вида фракталов
Фрактал. Три основные вида фракталов Командный вид спорта футбол
Командный вид спорта футбол