- Управление двигателями постоянного тока и шаговыми двигателями

Содержание
- 2. Двигатель постоянного тока Двигатель постоянного тока (ДПТ) состоит из: Статора; Ротора; Коллектора (или инвертора в бесколлекторных
- 3. Простейшая схема управления ДПТ Неправильный вариант!!! После отключения питания от мотора, он переходит в генераторный режим,
- 4. Механическая характеристика ДПТ и регулирование параметров
- 5. Схемы регулировки напряжения, подаваемого на ДПТ Показанные ниже схемы реализуют регулятор напряжения, подаваемого на двигатель. Значение
- 6. Использование ШИМ (PWM) для управления скоростью вращения ДПТ Наиболее простой метод регулирования скорости вращения ДПТ основан
- 7. Скважность и коэффициент заполнения ШИМ
- 8. Н-мост Для того чтобы иметь возможность управлять направлением вращения ротора ДПТ, применяют схему, называемую Н-мост (по
- 9. Режимы работы Н-моста «+» – ключ замкнут; «–» – ключ разомкнут
- 10. Основные режимы работы Н-моста Мотор вращается вправо Мотор вращается влево
- 11. Упрощенная схема Н-моста на транзисторах
- 12. Режимы работы Н-моста, построенного на транзисторах Мотор вращается вправо Мотор вращается влево
- 13. Драйвер ДПТ Н-мост можно собрать на отдельных транзисто-рах. Также сегодня промы-шленностью выпускаются готовые ИМС содержащие полный
- 14. Микросхема L293D Контакты L293D: +V – питание ИМС +5В; +Vmotor – питание моторов до +36В; 0V
- 15. Типовые схемы включения L293D (разные схемы включения моторов)
- 16. Режимы работы драйвера L293D: работа половины Н-моста. Если ДПТ должен вращаться только в одном направлении, его
- 17. Режимы работы драйвера L293D: работа полного Н-моста. Если нужно управлять направлением вращения ДПТ, используется полный Н-мост
- 18. Управление скоростью вращения ДПТ с помощью ШИМ и драйвера L293D Чтобы управлять скоростью вращения ДПТ с
- 19. Шаговый двигатель: состав и виды управления Шаговый двигатель (ШД) как и ДПТ состоит из статора и
- 20. Упрощенная схема ШД Шаговый двигатель (ШД), в общем случае, выглядит так, как пока-зано справа. Различия в
- 21. Волновое управление ШД ШД показанный справа имеет шаг поворота равный 90°. Обмотки задействуются по кругу —
- 22. Полношаговое управление ШД При таком управлении напряжение на обмотки подается попарно. В зави-симости от способа под-ключения
- 23. Полушаговое управление ШД При таком управлении все пары обмоток могут запитываться одновременно, в результате чего, ротор
- 24. Микрошаговое управление ШД Сегодня микрошаговый режим применяется для управления ШД чаще всего. Идея микрошага состоит в
- 25. Микрошаговое управление ШД Метод микрошага явля-ется в действительности способом питания ШД, а не методом управле-ния обмотками.
- 26. Фазы и обмотки ШД Шаговые двигатели – многофазные моторы. Больше обмоток – больше фаз. Больше фаз
- 27. Биполярный ШД Сама простая конфигурация. Используются 4 провода для подключения ШД к контрол-леру. Обмотки соединяются внутри
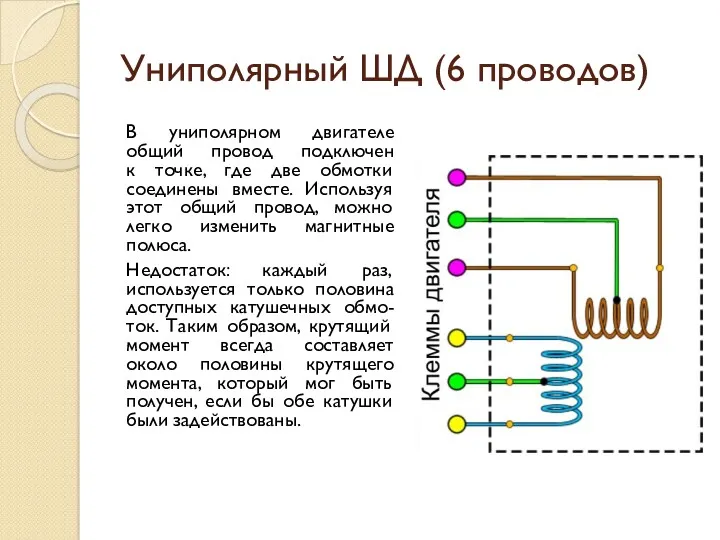
- 28. Униполярный ШД (6 проводов) В униполярном двигателе общий провод подключен к точке, где две обмотки соединены
- 29. Сравнение униполярного и биполярного ШД Униполярные электродвигатели должны быть в два раза более габаритными, по сравнению
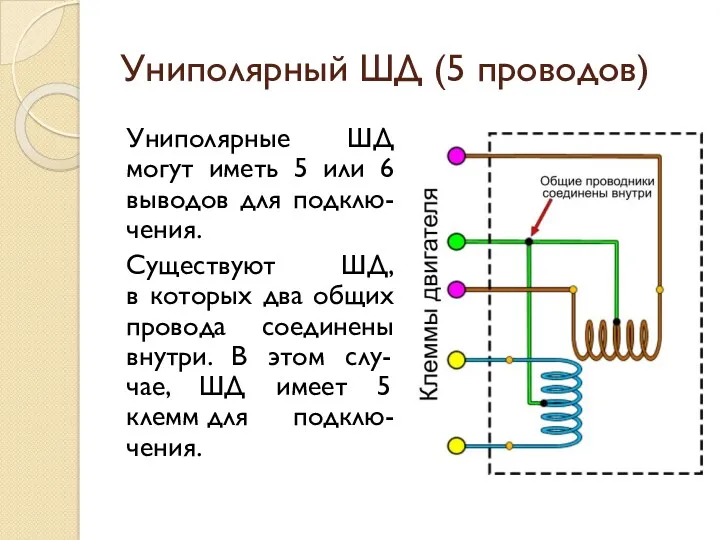
- 30. Униполярный ШД (5 проводов) Униполярные ШД могут иметь 5 или 6 выводов для подклю-чения. Существуют ШД,
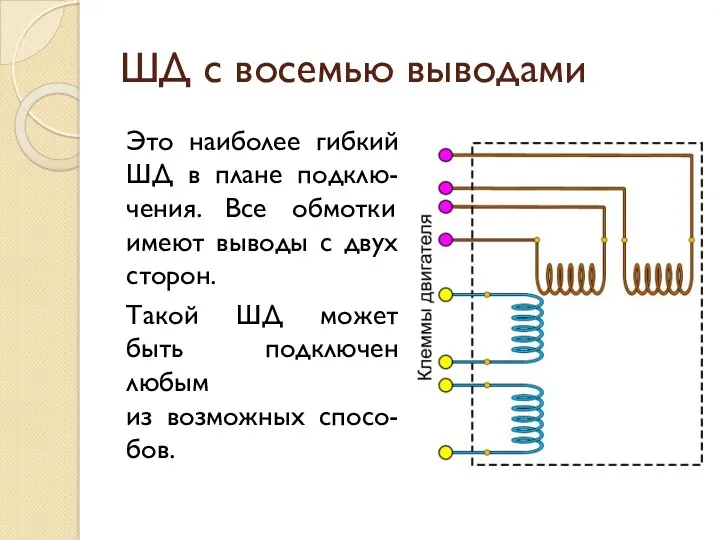
- 31. ШД с восемью выводами Это наиболее гибкий ШД в плане подклю-чения. Все обмотки имеют выводы с
- 32. Управление ШД с помощью драйвера Также как и для управления ДПТ, для управления ШД применяют микросхемы
- 33. Подключение биполярного ШД к драйверу L293D (Н-мосты)
- 34. Подключение ШД с помощью связки L297+L298N(+L6210)
- 35. Диаграммы полношагового и полушагового режимов управления
- 37. Скачать презентацию
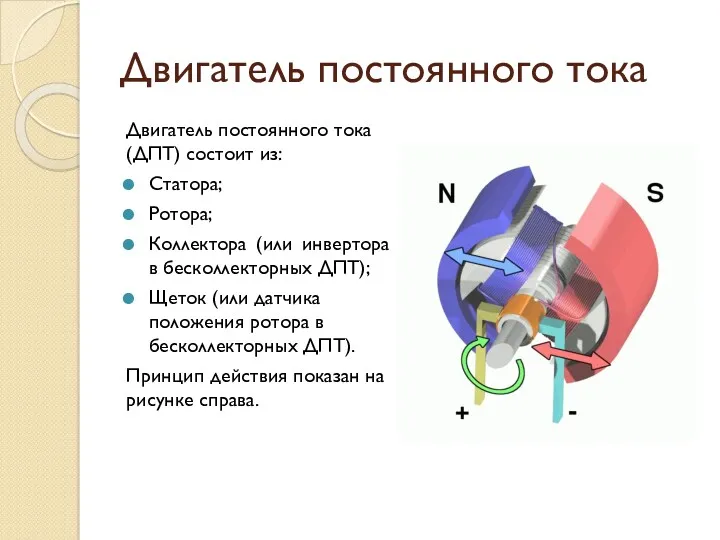
Двигатель постоянного тока
Двигатель постоянного тока (ДПТ) состоит из:
Статора;
Ротора;
Коллектора (или инвертора в
Двигатель постоянного тока
Двигатель постоянного тока (ДПТ) состоит из:
Статора;
Ротора;
Коллектора (или инвертора в
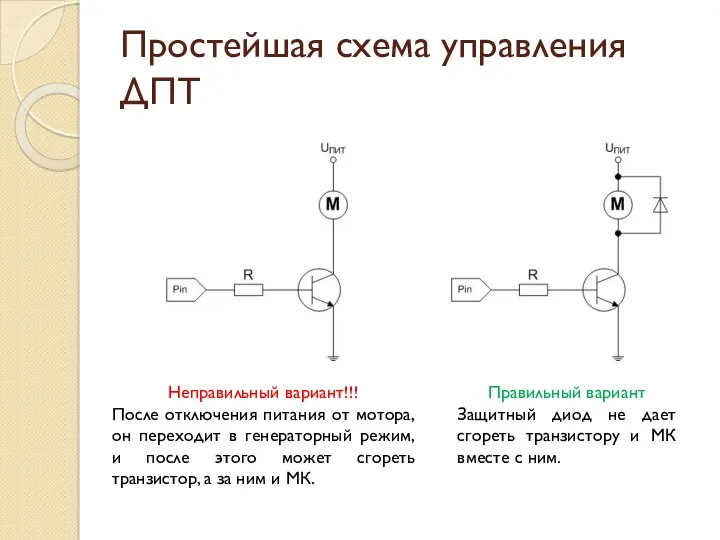
Простейшая схема управления ДПТ
Неправильный вариант!!!
После отключения питания от мотора, он переходит
Простейшая схема управления ДПТ
Неправильный вариант!!!
После отключения питания от мотора, он переходит
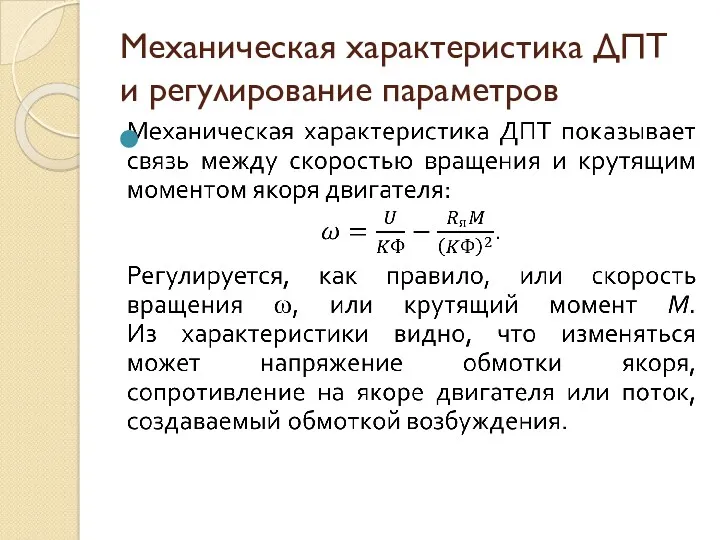
Механическая характеристика ДПТ и регулирование параметров
Механическая характеристика ДПТ и регулирование параметров
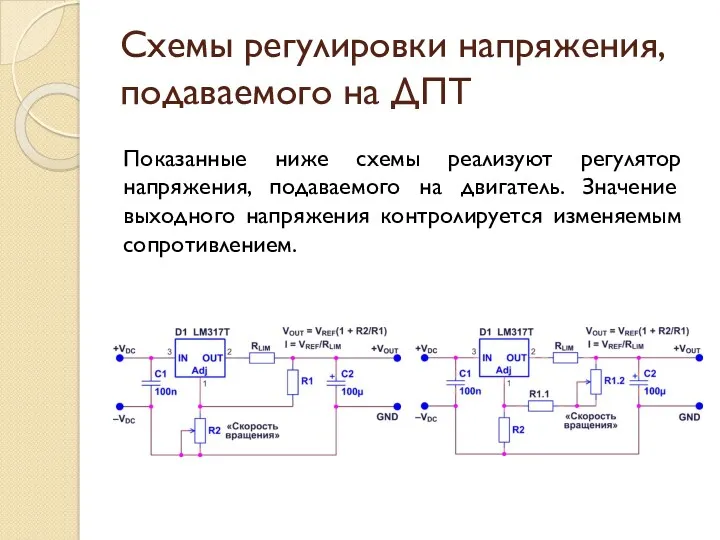
Схемы регулировки напряжения, подаваемого на ДПТ
Показанные ниже схемы реализуют регулятор напряжения,
Схемы регулировки напряжения, подаваемого на ДПТ
Показанные ниже схемы реализуют регулятор напряжения,
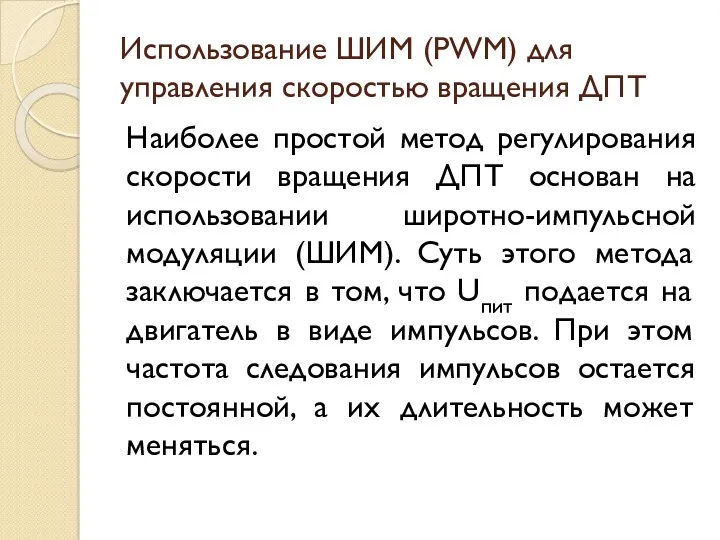
Использование ШИМ (PWM) для управления скоростью вращения ДПТ
Наиболее простой метод регулирования
Использование ШИМ (PWM) для управления скоростью вращения ДПТ
Наиболее простой метод регулирования
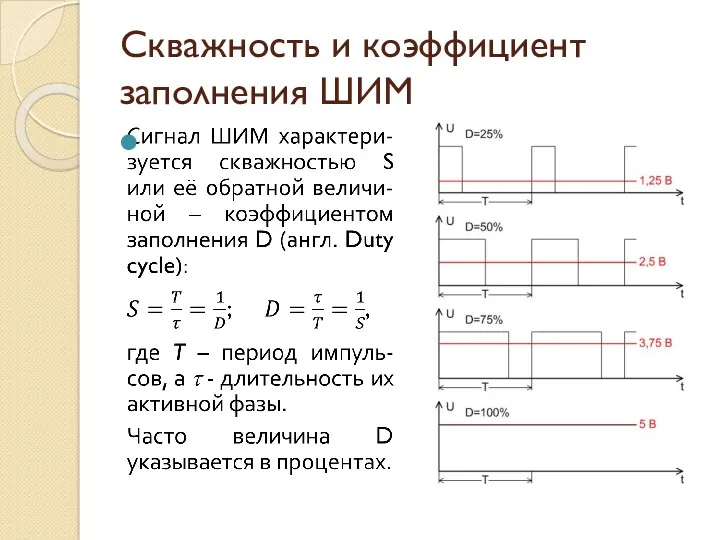
Скважность и коэффициент заполнения ШИМ
Скважность и коэффициент заполнения ШИМ
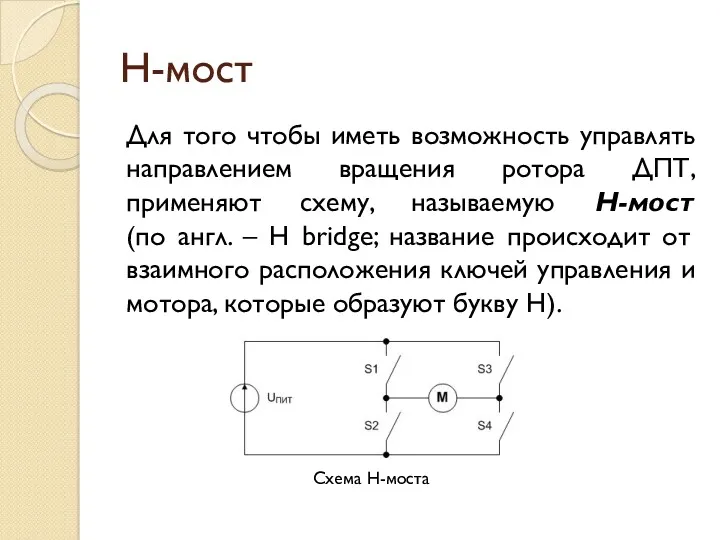
Н-мост
Для того чтобы иметь возможность управлять направлением вращения ротора ДПТ, применяют
Н-мост
Для того чтобы иметь возможность управлять направлением вращения ротора ДПТ, применяют
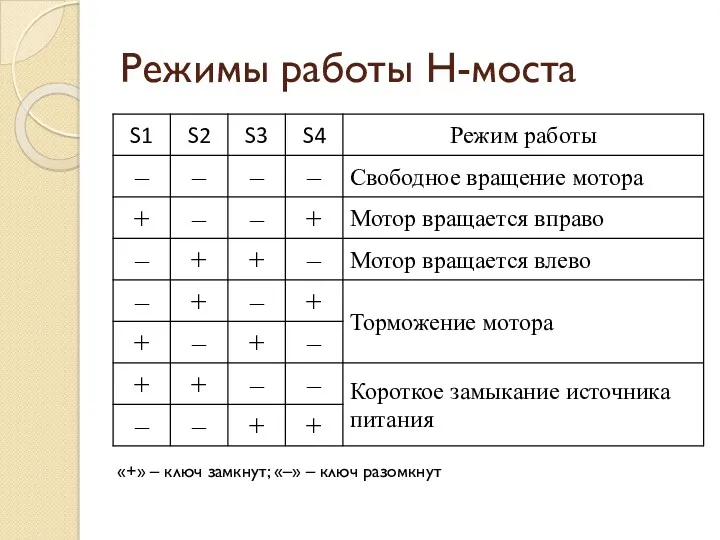
Режимы работы Н-моста
«+» – ключ замкнут; «–» – ключ разомкнут
Режимы работы Н-моста
«+» – ключ замкнут; «–» – ключ разомкнут
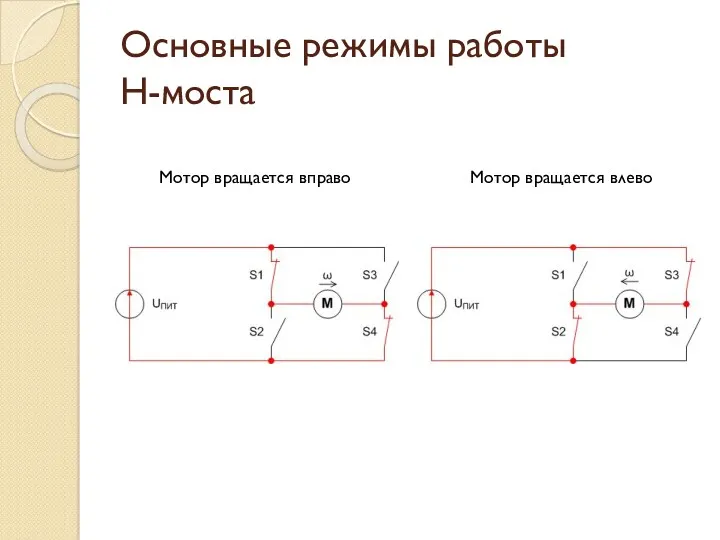
Основные режимы работы
Н-моста
Мотор вращается вправо
Мотор вращается влево
Основные режимы работы
Н-моста
Мотор вращается вправо
Мотор вращается влево
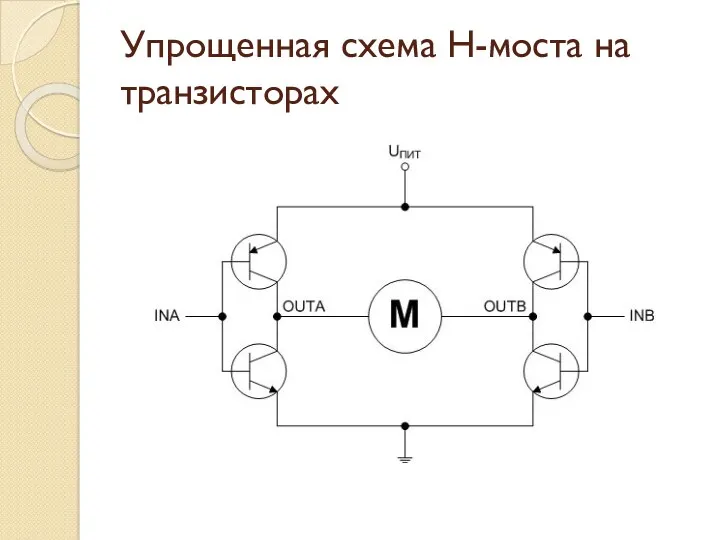
Упрощенная схема Н-моста на транзисторах
Упрощенная схема Н-моста на транзисторах
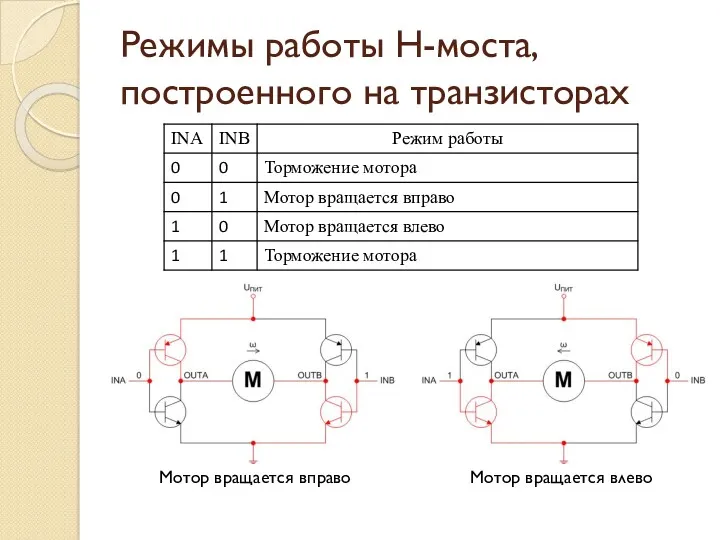
Режимы работы Н-моста, построенного на транзисторах
Мотор вращается вправо
Мотор вращается влево
Режимы работы Н-моста, построенного на транзисторах
Мотор вращается вправо
Мотор вращается влево

Драйвер ДПТ
Н-мост можно собрать
на отдельных транзисто-рах. Также сегодня промы-шленностью выпускаются
Драйвер ДПТ
Н-мост можно собрать на отдельных транзисто-рах. Также сегодня промы-шленностью выпускаются

Микросхема L293D
Контакты L293D:
+V – питание ИМС +5В;
+Vmotor – питание моторов до
Микросхема L293D
Контакты L293D:
+V – питание ИМС +5В;
+Vmotor – питание моторов до

Типовые схемы включения L293D (разные схемы включения моторов)
Типовые схемы включения L293D (разные схемы включения моторов)
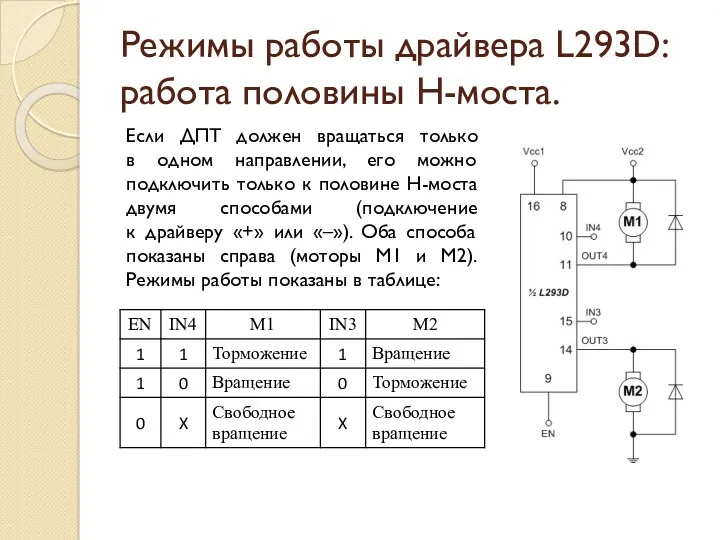
Режимы работы драйвера L293D: работа половины Н-моста.
Если ДПТ должен вращаться только
Режимы работы драйвера L293D: работа половины Н-моста.
Если ДПТ должен вращаться только
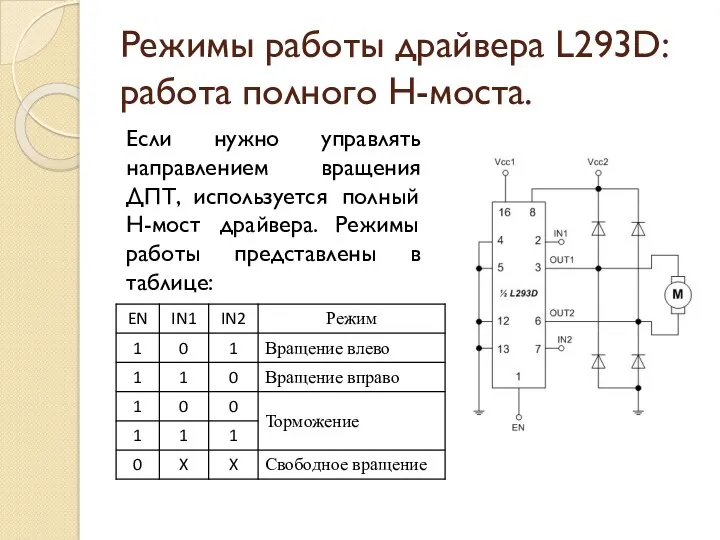
Режимы работы драйвера L293D: работа полного Н-моста.
Если нужно управлять направлением вращения
Режимы работы драйвера L293D: работа полного Н-моста.
Если нужно управлять направлением вращения
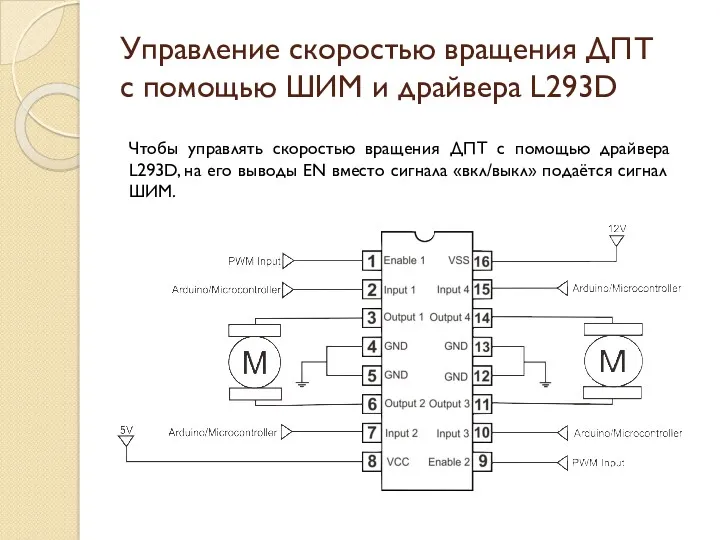
Управление скоростью вращения ДПТ
с помощью ШИМ и драйвера L293D
Чтобы управлять
Управление скоростью вращения ДПТ
с помощью ШИМ и драйвера L293D
Чтобы управлять

Шаговый двигатель: состав
и виды управления
Шаговый двигатель (ШД) как и ДПТ
Шаговый двигатель: состав
и виды управления
Шаговый двигатель (ШД) как и ДПТ
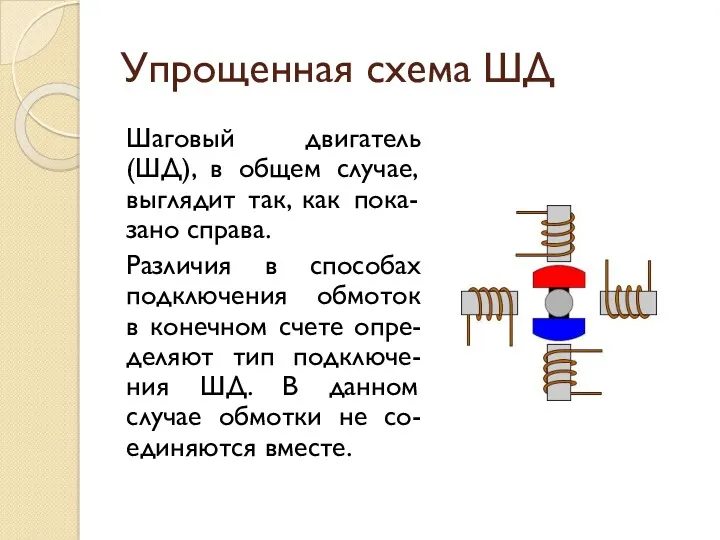
Упрощенная схема ШД
Шаговый двигатель (ШД), в общем случае, выглядит так, как
Упрощенная схема ШД
Шаговый двигатель (ШД), в общем случае, выглядит так, как
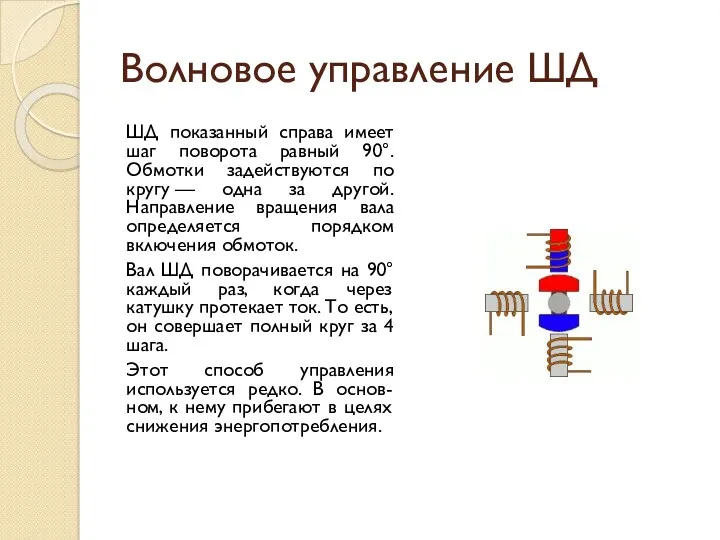
Волновое управление ШД
ШД показанный справа имеет шаг поворота равный 90°. Обмотки
Волновое управление ШД
ШД показанный справа имеет шаг поворота равный 90°. Обмотки
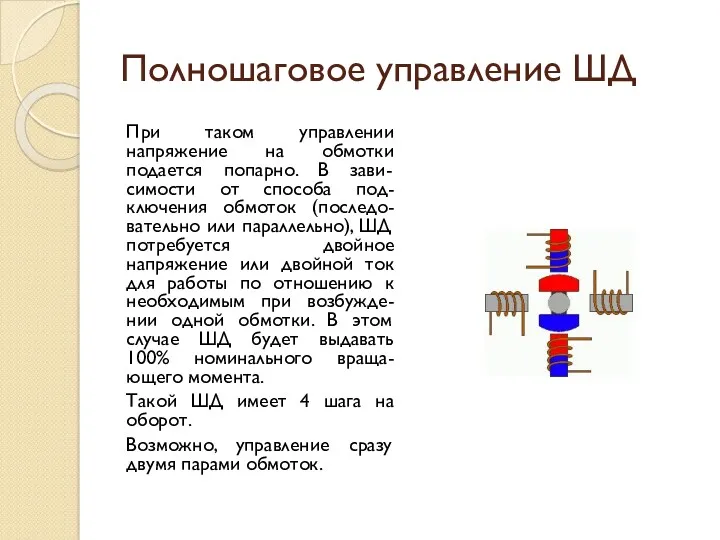
Полношаговое управление ШД
При таком управлении напряжение на обмотки подается попарно. В
Полношаговое управление ШД
При таком управлении напряжение на обмотки подается попарно. В
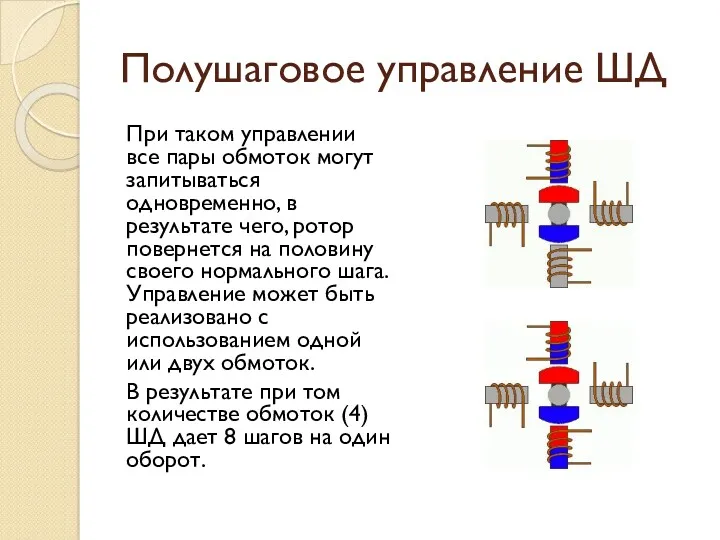
Полушаговое управление ШД
При таком управлении все пары обмоток могут запитываться одновременно,
Полушаговое управление ШД
При таком управлении все пары обмоток могут запитываться одновременно,
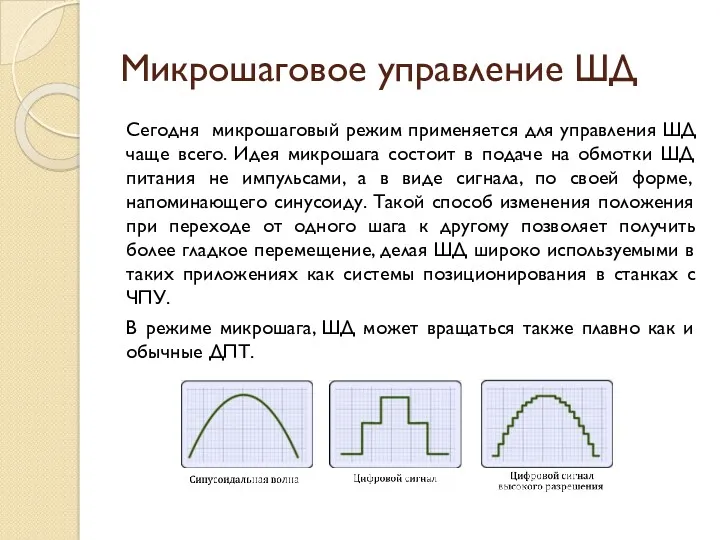
Микрошаговое управление ШД
Сегодня микрошаговый режим применяется для управления ШД чаще всего.
Микрошаговое управление ШД
Сегодня микрошаговый режим применяется для управления ШД чаще всего.
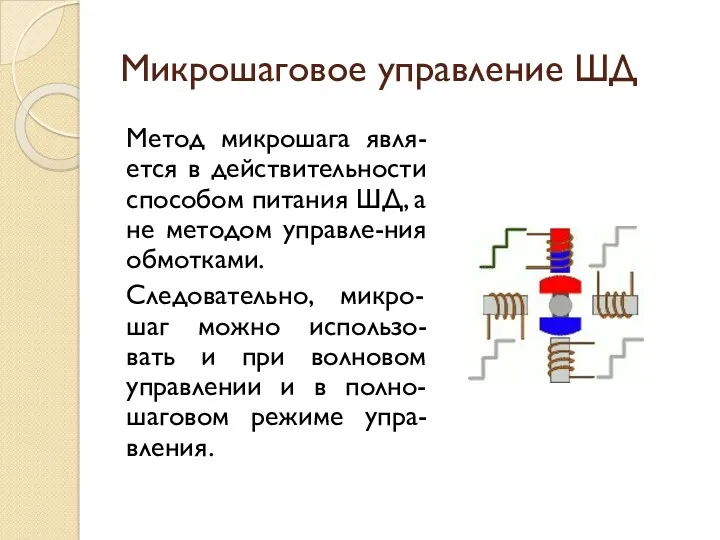
Микрошаговое управление ШД
Метод микрошага явля-ется в действительности способом питания ШД, а
Микрошаговое управление ШД
Метод микрошага явля-ется в действительности способом питания ШД, а
Фазы и обмотки ШД
Шаговые двигатели – многофазные моторы. Больше обмоток –
Фазы и обмотки ШД
Шаговые двигатели – многофазные моторы. Больше обмоток –

Биполярный ШД
Сама простая конфигурация. Используются 4 провода для подключения ШД к
Биполярный ШД
Сама простая конфигурация. Используются 4 провода для подключения ШД к
Униполярный ШД (6 проводов)
В униполярном двигателе общий провод подключен
к точке,
Униполярный ШД (6 проводов)
В униполярном двигателе общий провод подключен к точке,
Сравнение униполярного и биполярного ШД
Униполярные электродвигатели должны быть в два раза
Сравнение униполярного и биполярного ШД
Униполярные электродвигатели должны быть в два раза
Униполярный ШД (5 проводов)
Униполярные ШД могут иметь 5 или 6 выводов
Униполярный ШД (5 проводов)
Униполярные ШД могут иметь 5 или 6 выводов
ШД с восемью выводами
Это наиболее гибкий ШД в плане подклю-чения. Все
ШД с восемью выводами
Это наиболее гибкий ШД в плане подклю-чения. Все
Управление ШД с помощью драйвера
Также как и для управления ДПТ, для
Управление ШД с помощью драйвера
Также как и для управления ДПТ, для
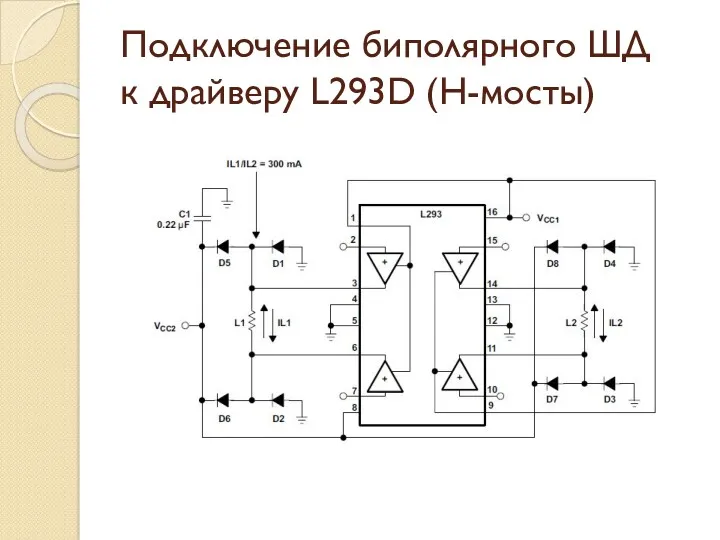
Подключение биполярного ШД
к драйверу L293D (Н-мосты)
Подключение биполярного ШД
к драйверу L293D (Н-мосты)

Подключение ШД с помощью связки L297+L298N(+L6210)
Подключение ШД с помощью связки L297+L298N(+L6210)
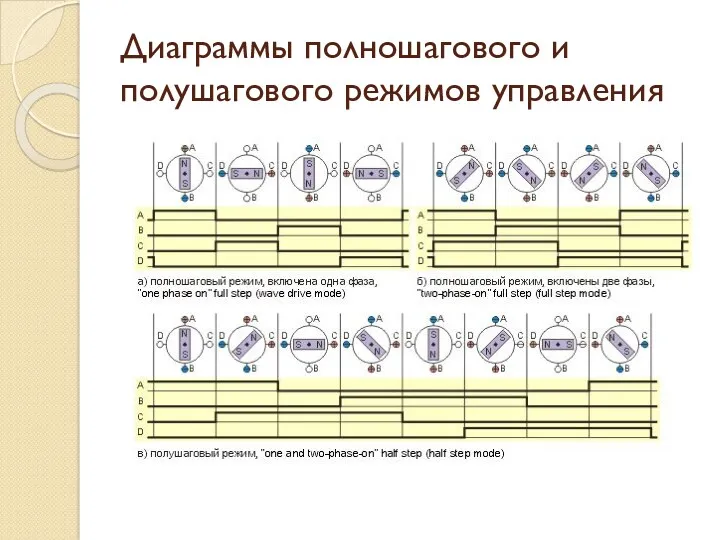
Диаграммы полношагового и полушагового режимов управления
Диаграммы полношагового и полушагового режимов управления
 Стартап за неделю
Стартап за неделю Презентация Любовь - основа жизни, ОРКСЭ, урок № 20, к учебнику Шемшуриной А. (Дрофа), 4 класс
Презентация Любовь - основа жизни, ОРКСЭ, урок № 20, к учебнику Шемшуриной А. (Дрофа), 4 класс Презентация театрального кружка в детском саду ТЕАТР И ДЕТИ
Презентация театрального кружка в детском саду ТЕАТР И ДЕТИ Grade can we speak to rik morell
Grade can we speak to rik morell Правила поведения детей на железнодорожном транспорте
Правила поведения детей на железнодорожном транспорте Система коррекционной работы с детьми раннего возраста
Система коррекционной работы с детьми раннего возраста Электр станциялары
Электр станциялары Разъединители. Коммутационная аппаратура
Разъединители. Коммутационная аппаратура Начало освоения Новороссии и Крыма
Начало освоения Новороссии и Крыма Теория отраслевых рынков (разделы курса)
Теория отраслевых рынков (разделы курса) Бессмертный полк
Бессмертный полк Цветущая ветка вишни
Цветущая ветка вишни Деепричастие. Деепричастие оборот
Деепричастие. Деепричастие оборот Типы и виды очистных снарядов
Типы и виды очистных снарядов Реализм. Новые жанры
Реализм. Новые жанры педагогический проект
педагогический проект 70 лет Победы
70 лет Победы 3 ФГОС общие ХАРАКТЕРИСТИКИ 3 ФГОС общие ХАРАКТЕРИСТИКИ
3 ФГОС общие ХАРАКТЕРИСТИКИ 3 ФГОС общие ХАРАКТЕРИСТИКИ h1495273913
h1495273913 Высказывания: Истинные, Ложные
Высказывания: Истинные, Ложные Морская лоция. Несение ходовой навигационной вахты на вспомогательном уровне ПДМНВ ІІ/4
Морская лоция. Несение ходовой навигационной вахты на вспомогательном уровне ПДМНВ ІІ/4 Спортивное питание
Спортивное питание Муниципальное бюджетное учреждение Спортивная школа №2 г. Ижевск
Муниципальное бюджетное учреждение Спортивная школа №2 г. Ижевск Радиоактивные изотопы в биологии и медицине
Радиоактивные изотопы в биологии и медицине Проект: Борьба Хуреш- игра сильных!
Проект: Борьба Хуреш- игра сильных! Germany
Germany Алкоголь и его влияние на здоровье человека
Алкоголь и его влияние на здоровье человека Как рисовать красивую кошку (1 класс)
Как рисовать красивую кошку (1 класс)