- Описание возможностей GPIO

Содержание
- 2. Raspberry PI 3
- 3. CSI камера Данная камера использует аппаратные ресурсы видеопроцессора, в связи с чем не создаёт излишней нагрузки
- 4. GPIO GPIO - группа портов ввода/вывода, на физическом уровне представлена разъёмом из двух рядов штырьковых выводов
- 5. I2C I2C - двунаправленная шина передачи данных, разработанная еще в 1980х годах компанией Philips для осуществления
- 6. I2C. Датчика давления, температуры и влажности BME280 производства Bosch Sensortec
- 7. UART com-порт RS-232 Примеры применения: подключение модуля bluetooth терминальная связь с компьютером
- 8. SPI SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс, шина SPI) — последовательный
- 9. Аналоги Raspberry Orange Pi Banana Pi BPI-M3
- 10. Raspbian
- 11. raspberry-gpio-python Importing the module try: import RPi.GPIO as GPIO except RuntimeError: print("Error importing RPi.GPIO! This is
- 12. Channels Warnings GPIO.setwarnings(False) Setup up a channel GPIO.setup(channel, GPIO.IN) GPIO.setup(channel, GPIO.OUT) GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH) chan_list =
- 13. Cleanup GPIO.cleanup(channel) GPIO.cleanup( (channel1, channel2) ) GPIO.cleanup( [channel1, channel2] ) import atexit def cleanup(): GPIO.cleanup() print("Cleaning
- 14. Inputs Pull up / Pull down resistors GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_UP) # or GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) Снимок
- 15. Inputs. Как опрашивать правильно? Interrupts and Edge detection! LOW -> HIGH = rising edge HIGH ->
- 16. Threaded callbacks def my_callback(channel): print('This is a edge event callback function!') print('Edge detected on channel %s'%channel)
- 17. Switch debounce (шумоподавитель) You may notice that the callbacks are called more than once for each
- 18. Пример, на input # coding: utf-8 import RPi.GPIO as GPIO import time, datetime import atexit import
- 19. GPIO Outputs 1. First set up RPi.GPIO import RPi.GPIO as GPIO GPIO.setmode(GPIO.BOARD) GPIO.setup(12, GPIO.OUT) 2. To
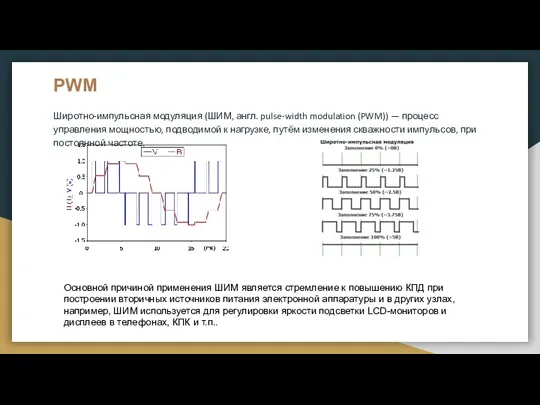
- 20. PWM Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью, подводимой к нагрузке, путём
- 21. Using PWM in RPi.GPIO To create a PWM instance: p = GPIO.PWM(channel, frequency) To start PWM:
- 22. Using PWM in RPi.GPIO An example to brighten/dim an LED: import time import RPi.GPIO as GPIO
- 24. Скачать презентацию
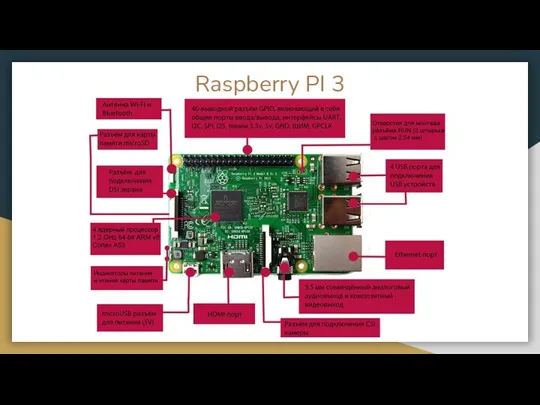
Raspberry PI 3
Raspberry PI 3
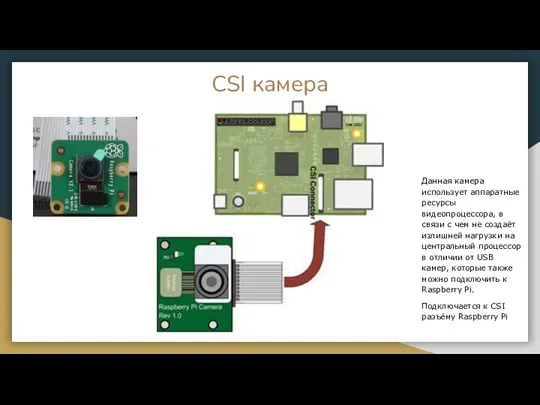
CSI камера
Данная камера использует аппаратные ресурсы видеопроцессора, в связи с чем
CSI камера
Данная камера использует аппаратные ресурсы видеопроцессора, в связи с чем
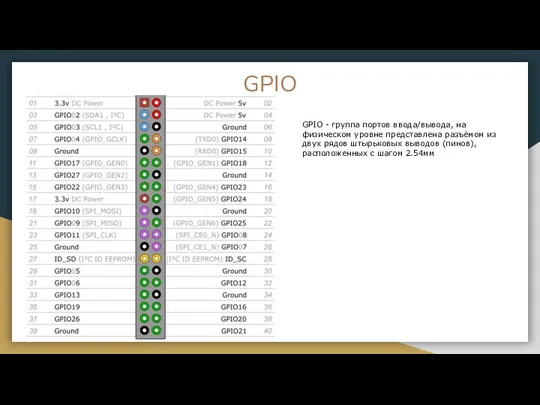
GPIO
GPIO - группа портов ввода/вывода, на физическом уровне представлена разъёмом из
GPIO
GPIO - группа портов ввода/вывода, на физическом уровне представлена разъёмом из
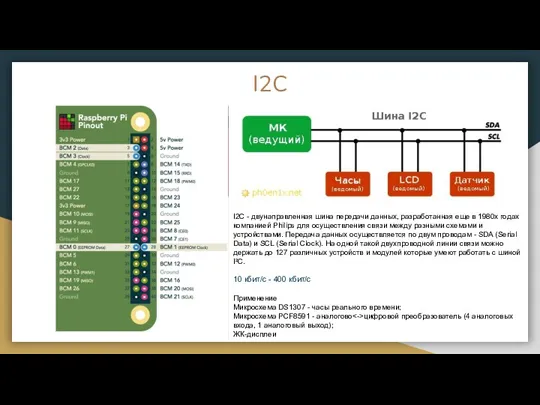
I2C
I2C - двунаправленная шина передачи данных, разработанная еще в 1980х годах
I2C
I2C - двунаправленная шина передачи данных, разработанная еще в 1980х годах

I2C. Датчика давления, температуры и влажности BME280 производства Bosch Sensortec
I2C. Датчика давления, температуры и влажности BME280 производства Bosch Sensortec
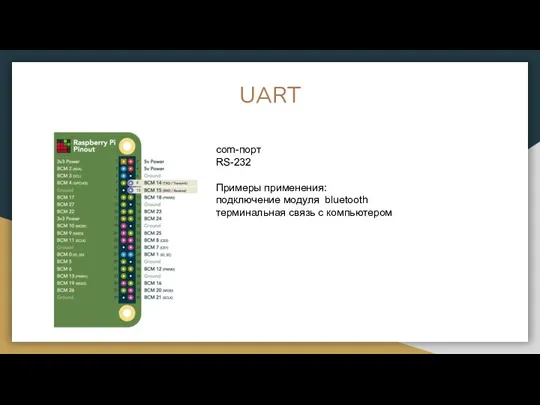
UART
com-порт
RS-232
Примеры применения:
подключение модуля bluetooth
терминальная связь с компьютером
UART
com-порт
RS-232
Примеры применения:
подключение модуля bluetooth
терминальная связь с компьютером
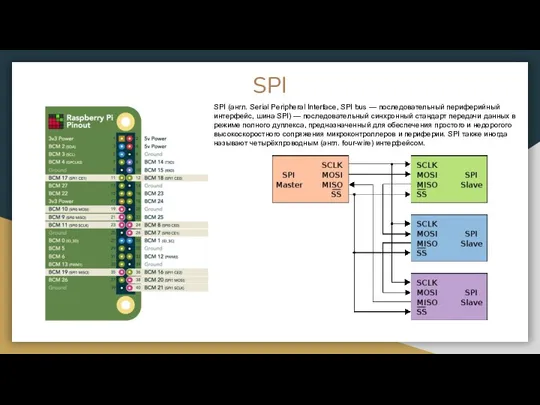
SPI
SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс,
SPI
SPI (англ. Serial Peripheral Interface, SPI bus — последовательный периферийный интерфейс,
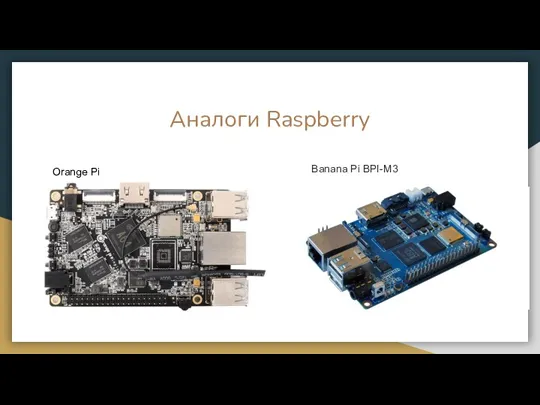
Аналоги Raspberry
Orange Pi
Banana Pi BPI-M3
Аналоги Raspberry
Orange Pi
Banana Pi BPI-M3
Raspbian
Raspbian
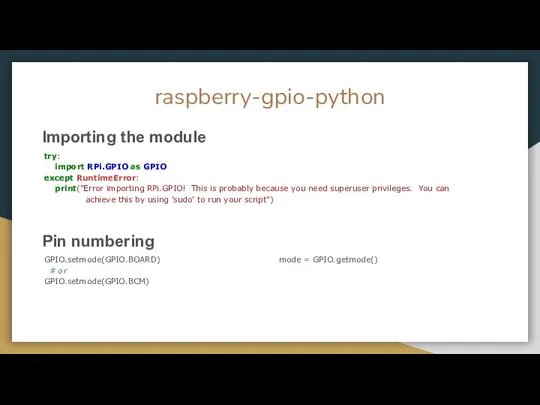
raspberry-gpio-python
Importing the module
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importing RPi.GPIO!
raspberry-gpio-python
Importing the module
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importing RPi.GPIO!
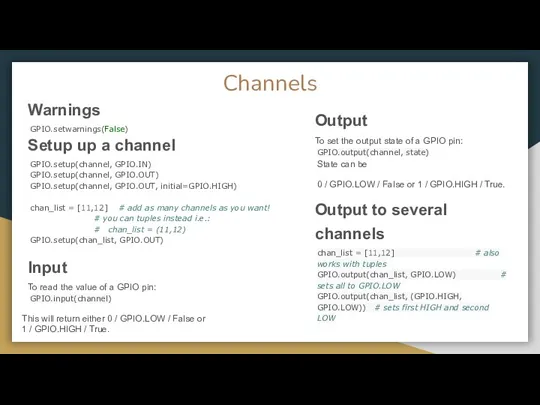
Channels
Warnings
GPIO.setwarnings(False)
Setup up a channel
GPIO.setup(channel, GPIO.IN)
GPIO.setup(channel, GPIO.OUT)
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH)
chan_list = [11,12] #
Channels
Warnings
GPIO.setwarnings(False)
Setup up a channel
GPIO.setup(channel, GPIO.IN)
GPIO.setup(channel, GPIO.OUT)
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH)
chan_list = [11,12] #
![Cleanup GPIO.cleanup(channel) GPIO.cleanup( (channel1, channel2) ) GPIO.cleanup( [channel1, channel2] )](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/250053/slide-12.jpg)
Cleanup
GPIO.cleanup(channel)
GPIO.cleanup( (channel1, channel2) )
GPIO.cleanup( [channel1, channel2] )
import atexit
def cleanup():
GPIO.cleanup()
print("Cleaning
Cleanup
GPIO.cleanup(channel)
GPIO.cleanup( (channel1, channel2) )
GPIO.cleanup( [channel1, channel2] )
import atexit
def cleanup():
GPIO.cleanup()
print("Cleaning
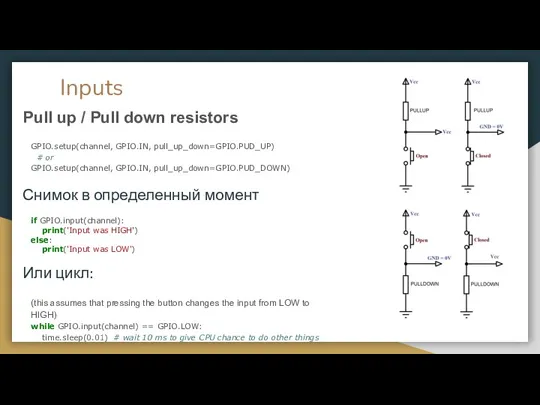
Inputs
Pull up / Pull down resistors
GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# or
GPIO.setup(channel, GPIO.IN,
Inputs
Pull up / Pull down resistors
GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# or
GPIO.setup(channel, GPIO.IN,
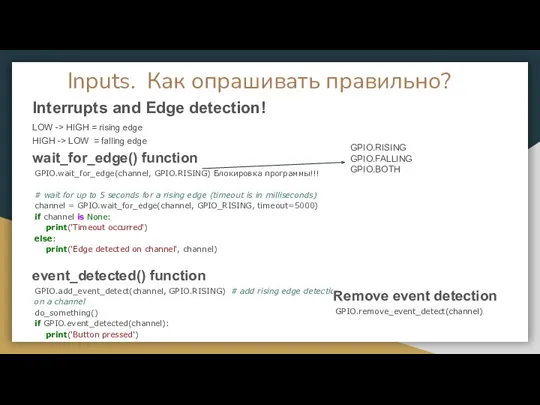
Inputs. Как опрашивать правильно?
Interrupts and Edge detection!
LOW -> HIGH = rising
Inputs. Как опрашивать правильно?
Interrupts and Edge detection!
LOW -> HIGH = rising
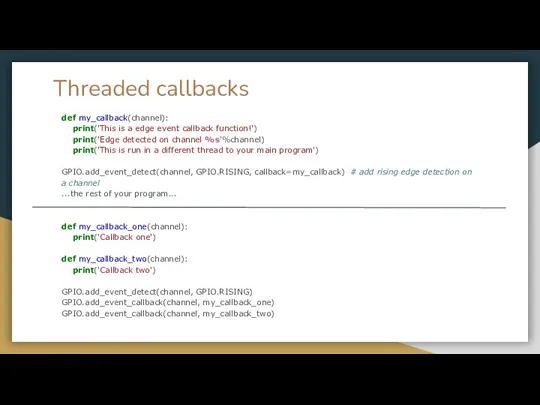
Threaded callbacks
def my_callback(channel):
print('This is a edge event callback function!')
print('Edge
Threaded callbacks
def my_callback(channel): print('This is a edge event callback function!') print('Edge
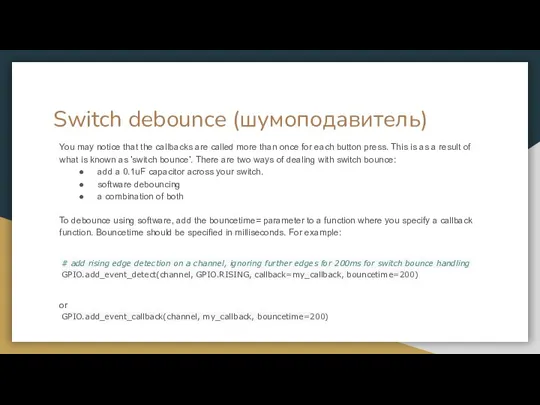
Switch debounce (шумоподавитель)
You may notice that the callbacks are called more
Switch debounce (шумоподавитель)
You may notice that the callbacks are called more
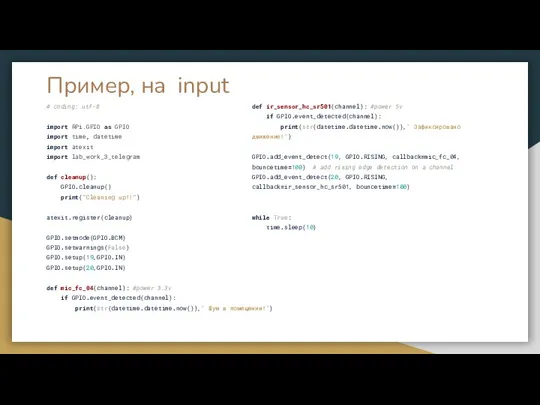
Пример, на input
# coding: utf-8
import RPi.GPIO as GPIO
import time, datetime
import
Пример, на input
# coding: utf-8 import RPi.GPIO as GPIO import time, datetime import
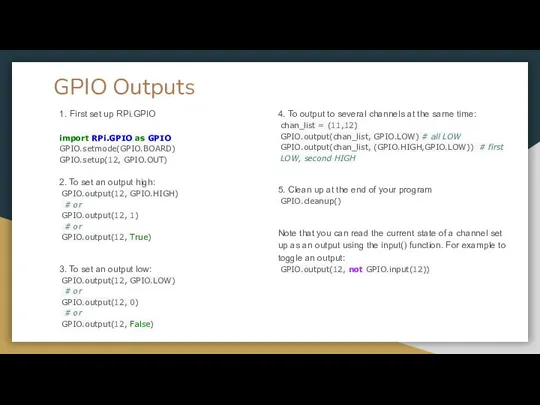
GPIO Outputs
1. First set up RPi.GPIO
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.setup(12, GPIO.OUT)
2.
GPIO Outputs
1. First set up RPi.GPIO
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.setup(12, GPIO.OUT)
2.
PWM
Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью,
PWM
Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью,
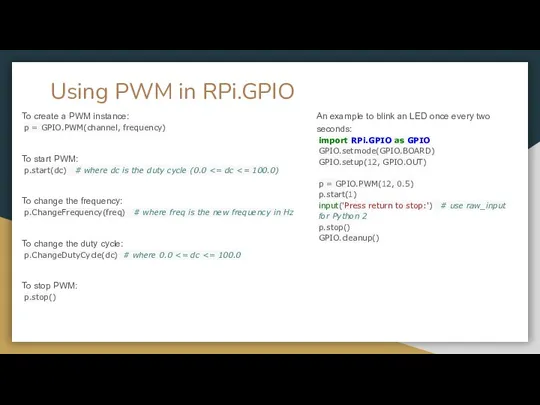
Using PWM in RPi.GPIO
To create a PWM instance:
p = GPIO.PWM(channel, frequency)
To
Using PWM in RPi.GPIO
To create a PWM instance:
p = GPIO.PWM(channel, frequency)
To
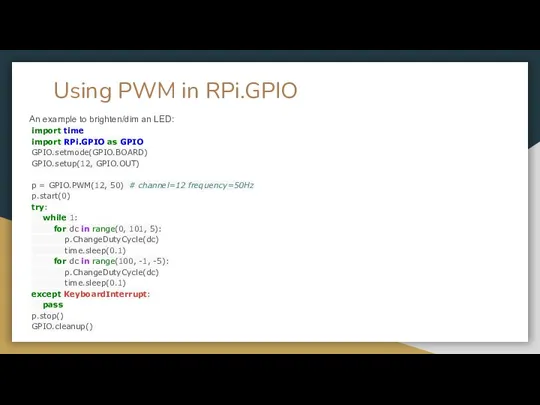
Using PWM in RPi.GPIO
An example to brighten/dim an LED:
import time
import RPi.GPIO
Using PWM in RPi.GPIO
An example to brighten/dim an LED:
import time
import RPi.GPIO
 Игра-презентация по Карточкам Ханса
Игра-презентация по Карточкам Ханса Презентация Углеводороды.
Презентация Углеводороды. Введение в IDE Unity
Введение в IDE Unity Пилотный проект. Город Пермь
Пилотный проект. Город Пермь Условия и срок в гражданско-правовой сделке
Условия и срок в гражданско-правовой сделке Среда обитания живых организмов. 5 класс. Диск
Среда обитания живых организмов. 5 класс. Диск Традиционные и нетрадиционные направления в искусстве в конце 19 - начале 20 в
Традиционные и нетрадиционные направления в искусстве в конце 19 - начале 20 в Многопроцессорные вычислительные системы
Многопроцессорные вычислительные системы Стандарт КП пример- восстановлен
Стандарт КП пример- восстановлен Устройства компьютера
Устройства компьютера Личностно-ориентированные технологии
Личностно-ориентированные технологии Афинские школы
Афинские школы Структура исследовательской работы обучающихся
Структура исследовательской работы обучающихся Портфолио, как способ представления мастера п/о, педагога Камышловского ПУ
Портфолио, как способ представления мастера п/о, педагога Камышловского ПУ Линейный список. Двусвязный список
Линейный список. Двусвязный список Герман Гессе 1877-1962
Герман Гессе 1877-1962 Классификация систем разработки. Разработка месторождений на естественном режиме и с ППД. (Лекция 4)
Классификация систем разработки. Разработка месторождений на естественном режиме и с ППД. (Лекция 4) Вредные привычки. Курение. Алкоголизм. Наркомания
Вредные привычки. Курение. Алкоголизм. Наркомания Изменения в гражданский кодекс Российской Федерации. Законопроект № 47538-6
Изменения в гражданский кодекс Российской Федерации. Законопроект № 47538-6 Особенности сестринского ухода в психиатрии и наркологии. Организация психиатрической помощи в РФ
Особенности сестринского ухода в психиатрии и наркологии. Организация психиатрической помощи в РФ Обязанности водителя
Обязанности водителя Тема:Ознакомление детей с окружающей действительностью – как средство воспитания патриотизма у детей дошкольного возраста
Тема:Ознакомление детей с окружающей действительностью – как средство воспитания патриотизма у детей дошкольного возраста Система научной литературы. Типы и виды научных документов
Система научной литературы. Типы и виды научных документов 20231022_prezentatsiya1_0
20231022_prezentatsiya1_0 Презентация Как полюбить чтение?
Презентация Как полюбить чтение? Сотовая связь
Сотовая связь Конспект урока по теме: Кислород
Конспект урока по теме: Кислород Безопасное поведение летом.
Безопасное поведение летом.