Управление приводом и разработка режимов работы устройства для изготовления арамидных торсионных подвесов приборов презентация
- Управление приводом и разработка режимов работы устройства для изготовления арамидных торсионных подвесов приборов

Содержание
- 2. Цель и задачи работы Создать систему управления приводом и реализовать четыре режима работы модернизированного устройства для
- 3. Устройство плетения арамидных торсионов 3 Филамент арамидной нити Торсион
- 4. Использование торсионов 4 Геофизический комплекс GI-MTS-1 (СПбФ ИЗМИРАН)
- 5. Принципы работы устройства 5 Схемa модернизированного Устройства (а), схема исполнительного механизма (б) и процесс плетения торсиона
- 6. Параметры торсиона, планируемого к изготовлению 6 а) б) в) 3d модель торсиона, плотность плетения 7 узлов/мм
- 7. 7 Режимы работы модернизированного устройства Предусмотрены четыре режима работы: три в режиме плетения, рассчитанные на разную
- 8. 8 Электронные компоненты для устройства Привод; Платы arduino; Энкодер /Цифровой датчик угла поворота ; Кнопки; Светодиоды;
- 9. 9 Критерии при выборе двигателя ω=68,55 об/мин = 7,178 рад/с – рабочая скорость двигателя устройства ε=0.71001
- 10. Выбор двигателя и расчет его резонансной частоты Был выбран шаговый двигатель: FL57STH76-2804 Основные паспортные характеристики: Крутящий
- 11. Управление приводом c помощью платформы ARDUINO Основные критерии выбора блока управления: Экономичность Надежность Многофункцианальность 11
- 12. 12 Режимы работы модернизированного устройства Выполнен расчет времени без учета подготовительных операций, которое будет затрачено на
- 13. Выбор других компонентов и сборка 13 Arduino Rev 3 Motor Shield(L298P) RS-35-12 2x 2N2222 NPN транзистор
- 14. Алгоритм программы 14
- 15. Заключение 15 Создана система управления приводом и реализованы 4-е режима работы модернизированного устройства для изготовления торсионных
- 16. Спасибо за внимание!
- 18. Скачать презентацию
Цель и задачи работы
Создать систему управления приводом и реализовать четыре режима
Цель и задачи работы
Создать систему управления приводом и реализовать четыре режима

Устройство плетения арамидных торсионов
3
Филамент арамидной нити
Торсион
Устройство плетения арамидных торсионов
3
Филамент арамидной нити
Торсион

Использование торсионов
4
Геофизический комплекс GI-MTS-1 (СПбФ ИЗМИРАН)
Использование торсионов
4
Геофизический комплекс GI-MTS-1 (СПбФ ИЗМИРАН)

Принципы работы устройства
5
Схемa модернизированного Устройства (а), схема исполнительного механизма (б) и
Принципы работы устройства
5
Схемa модернизированного Устройства (а), схема исполнительного механизма (б) и
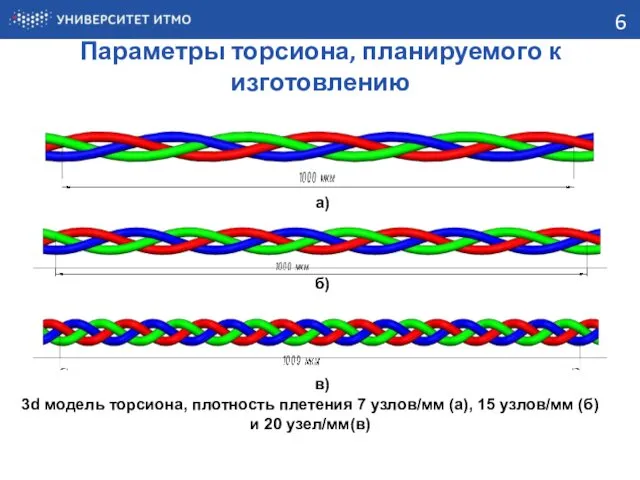
Параметры торсиона, планируемого к изготовлению
6
а)
б)
в)
3d модель торсиона, плотность плетения 7 узлов/мм
Параметры торсиона, планируемого к изготовлению
6
а)
б)
в)
3d модель торсиона, плотность плетения 7 узлов/мм
7
Режимы работы модернизированного устройства
Предусмотрены четыре режима работы:
три в режиме плетения, рассчитанные
7
Режимы работы модернизированного устройства
Предусмотрены четыре режима работы:
три в режиме плетения, рассчитанные

8
Электронные компоненты для устройства
Привод;
Платы arduino;
Энкодер /Цифровой датчик угла поворота ;
Кнопки;
Светодиоды;
Динамик;
и
8
Электронные компоненты для устройства
Привод;
Платы arduino;
Энкодер /Цифровой датчик угла поворота ;
Кнопки;
Светодиоды;
Динамик;
и
9
Критерии при выборе двигателя
ω=68,55 об/мин = 7,178 рад/с – рабочая скорость
9
Критерии при выборе двигателя
ω=68,55 об/мин = 7,178 рад/с – рабочая скорость
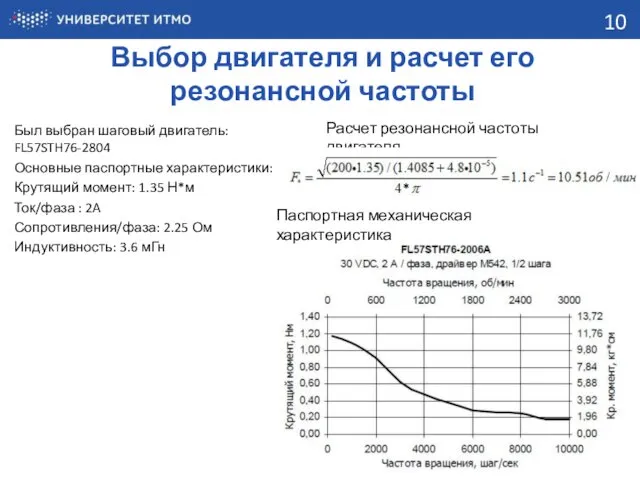
Выбор двигателя и расчет его резонансной частоты
Был выбран шаговый двигатель:
FL57STH76-2804
Основные паспортные
Выбор двигателя и расчет его резонансной частоты
Был выбран шаговый двигатель:
FL57STH76-2804
Основные паспортные

Управление приводом c помощью платформы ARDUINO
Основные критерии выбора блока управления:
Экономичность
Надежность
Многофункцианальность
11
Управление приводом c помощью платформы ARDUINO
Основные критерии выбора блока управления:
Экономичность
Надежность
Многофункцианальность
11
12
Режимы работы модернизированного устройства
Выполнен расчет времени без учета подготовительных операций, которое
12
Режимы работы модернизированного устройства
Выполнен расчет времени без учета подготовительных операций, которое

Выбор других компонентов и сборка
13
Arduino Rev 3
Motor Shield(L298P)
RS-35-12
2x 2N2222 NPN транзистор
Инфракрасный
Выбор других компонентов и сборка
13
Arduino Rev 3
Motor Shield(L298P)
RS-35-12
2x 2N2222 NPN транзистор
Инфракрасный

Алгоритм программы
14
Алгоритм программы
14
Заключение
15
Создана система управления приводом и реализованы 4-е режима работы модернизированного устройства
Заключение
15
Создана система управления приводом и реализованы 4-е режима работы модернизированного устройства
Спасибо за внимание!
Спасибо за внимание!
 Willkommen in Bayern!
Willkommen in Bayern! Евразия
Евразия Детство как феномен
Детство как феномен Мовленнєвий етикет в діловому спілкуванні
Мовленнєвий етикет в діловому спілкуванні Что такое храм,икона?
Что такое храм,икона? Проектная деятельность
Проектная деятельность Формирование УУД во внеклассной работе в процессе обучения химии
Формирование УУД во внеклассной работе в процессе обучения химии Презентация без названия
Презентация без названия Кубановедение. Казачья хата.
Кубановедение. Казачья хата. Массаж при заболеваниях сердечно-сосудистой системы. (Тема 5.4)
Массаж при заболеваниях сердечно-сосудистой системы. (Тема 5.4) Промышленность Калининградской области
Промышленность Калининградской области Строение атома. Электронные оболочки. Квантовые числа. Главное квантовое число
Строение атома. Электронные оболочки. Квантовые числа. Главное квантовое число Психолого-педагогическая диагностика в рисунках
Психолого-педагогическая диагностика в рисунках Форматирование абзацев. Стилевое форматирование. OpenOffice Writer. Обработка текстовой информации
Форматирование абзацев. Стилевое форматирование. OpenOffice Writer. Обработка текстовой информации Значення кожного з семи тижнів до Великодня
Значення кожного з семи тижнів до Великодня Обычаи народов России
Обычаи народов России Содержание химических элементов в организме. Макро- и микроэлементы
Содержание химических элементов в организме. Макро- и микроэлементы День Победы
День Победы Вопросы и ответы из Библии
Вопросы и ответы из Библии Двухкомпонентный имплант для восстановления опорной и двигательной функции у пациентов с травмами и патологиями позвоночника
Двухкомпонентный имплант для восстановления опорной и двигательной функции у пациентов с травмами и патологиями позвоночника Пирамида. (10 класс)
Пирамида. (10 класс) Мультимедиа
Мультимедиа Птицы нашей Родины
Птицы нашей Родины Три вида продуктов, введение которых обязательно до года жизни
Три вида продуктов, введение которых обязательно до года жизни Введение в предмет рекреационно – оздоровительные системы
Введение в предмет рекреационно – оздоровительные системы Инвентарь и специальное снаряжение для служебных собак
Инвентарь и специальное снаряжение для служебных собак Комплименты. Урок риторики
Комплименты. Урок риторики Лэт-бук Архангельская область
Лэт-бук Архангельская область