- Управление в биотехнических системах

Содержание
- 2. 1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ УПРАВЛЕНИЯ. ПРИНЦИПЫ УПРАВЛЕНИЯ. 1.1. Понятия об управлении и системах управления. Составляющие процесса
- 3. Необходимые составляющие процесса управления рассмотрим на примере движения судна Целью процесса управления в данном случае является
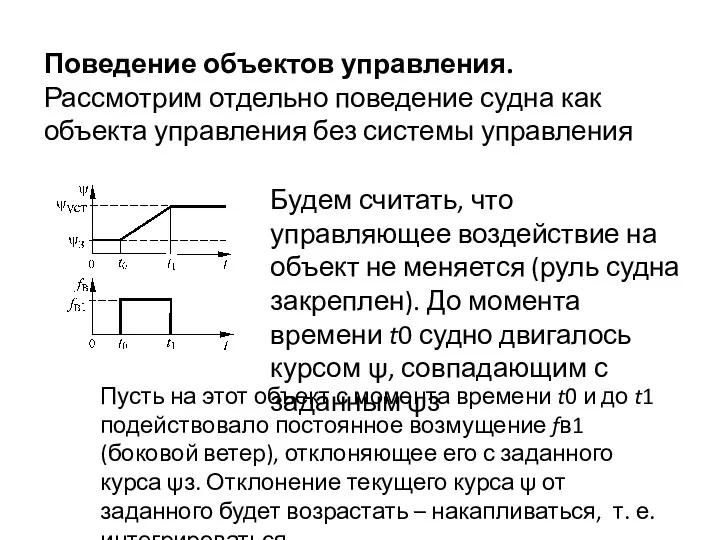
- 4. При движении ОУ (судно) подвергается возмущающему воздействию fв (волны, порывы ветра), в результате чего текущий курс
- 5. УУ “принимает решение”, т. е. вырабатывает управляющее воздействие на основе величины рассогласования и в соответствии с
- 6. Рассмотренный пример содержит все необходимые аспекты, то есть все перечисленные ниже составляющие процесса управления любым объектом.
- 7. Отсутствие хотя бы одной из перечисленных составляющих или их неправильная организация делают невозможным осуществление процесса управления
- 8. Для организации процесса управления конкретным объектом помимо УУ необходимы измерительные устройства для получения информации о текущем
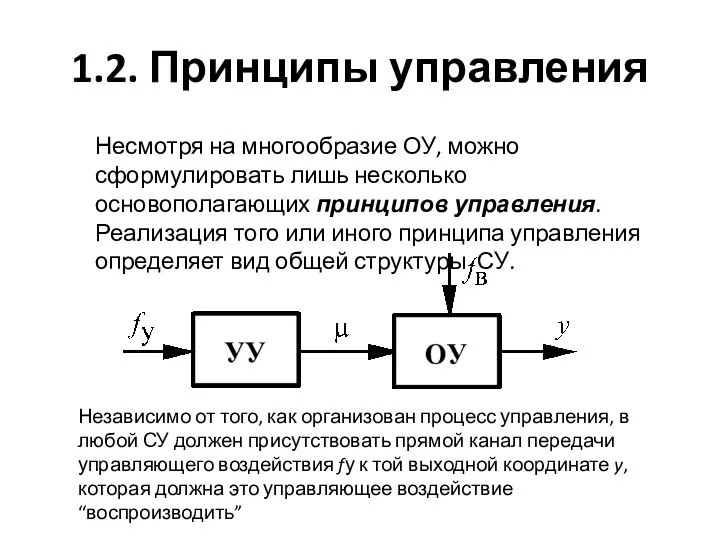
- 9. 1.2. Принципы управления Несмотря на многообразие ОУ, можно сформулировать лишь несколько основополагающих принципов управления. Реализация того
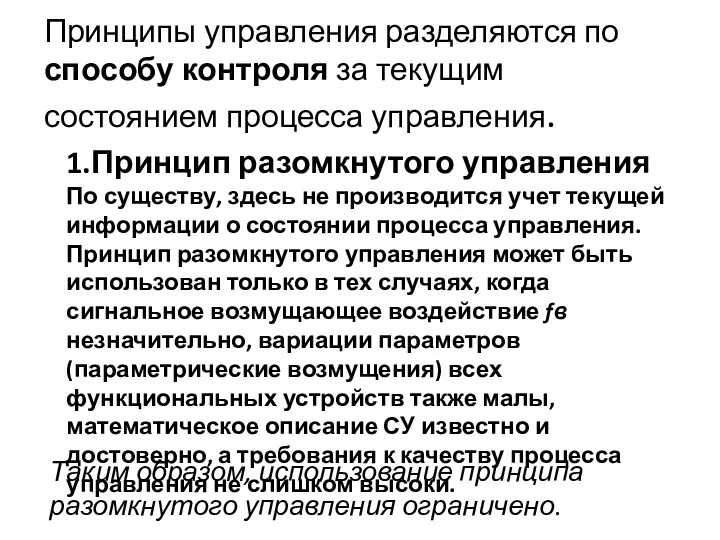
- 10. Принципы управления разделяются по способу контроля за текущим состоянием процесса управления. 1.Принцип разомкнутого управления По существу,
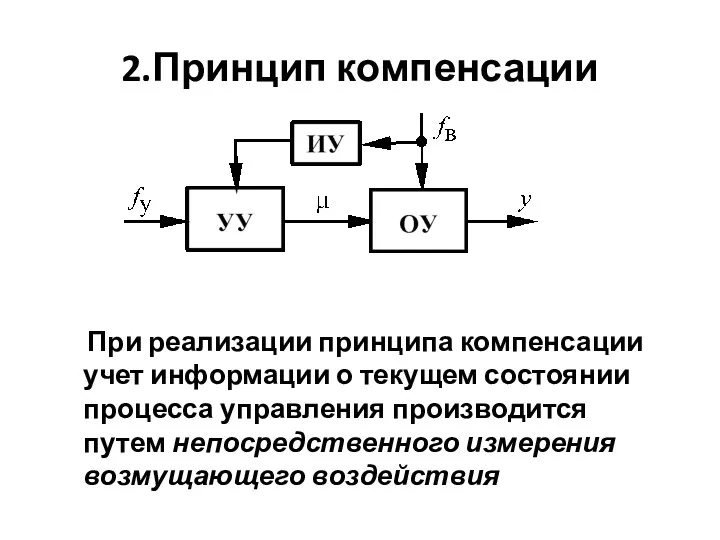
- 11. 2.Принцип компенсации При реализации принципа компенсации учет информации о текущем состоянии процесса управления производится путем непосредственного
- 12. Структурной особенностью СУ, реализующих принцип компенсации, является наличие на структурной схеме модели дополнительного пути прохожде-ния возмущающего
- 13. Очевидно, что влияние параметрических возмущений и неопределенность параметров операторов функциональных звеньев в данном случае не учитываются,
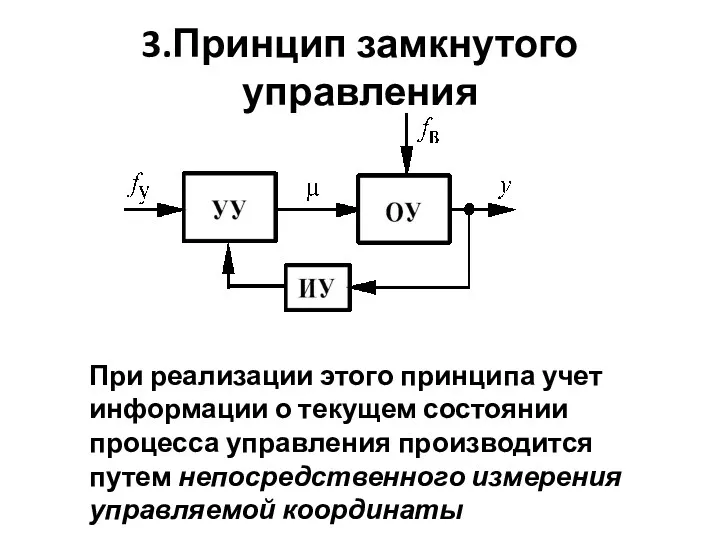
- 14. 3.Принцип замкнутого управления При реализации этого принципа учет информации о текущем состоянии процесса управления производится путем
- 15. Структурной особенностью СУ, реализующих принцип замкнутого управления, является наличие на структурной схеме модели системы замкнутого пути
- 16. 4.Принцип комбинированного управления Этот принцип является комбинацией (объединением) принципов компенсации и замкнутого управления
- 17. Существенной особенностью замкнутого управления является то обстоятельство, что не имеют значения причины, вызвавшие отклонение процесса от
- 18. Следует отметить, что выработка УУ нового управляющего воздействия для реагирования на изменившееся текущее состояние может произойти
- 19. Комбинированный принцип целесообразно использовать при высоких требованиях к качеству процесса управления и в том случае, если
- 20. 1.3. Классификация систем управления В основе любой классификации лежат признаки, по которым множество объектов подразделяется на
- 21. Классификация систем управления по информационному признаку В этом случае СУ подразделяются по способу получения текущей информации
- 22. Классификация систем управления по типу сигналов Используемые в теории управления модели СУ как правило абстрагированы от
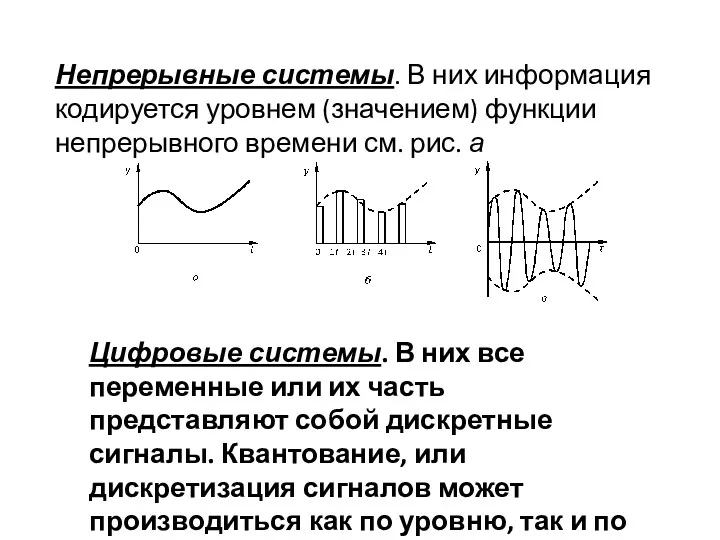
- 23. Непрерывные системы. В них информация кодируется уровнем (значением) функции непрерывного времени см. рис. а Цифровые системы.
- 24. На рис. б приведен пример квантования непрерывного сигнала с одинаковыми периодом следования T и длительностью импульсов,
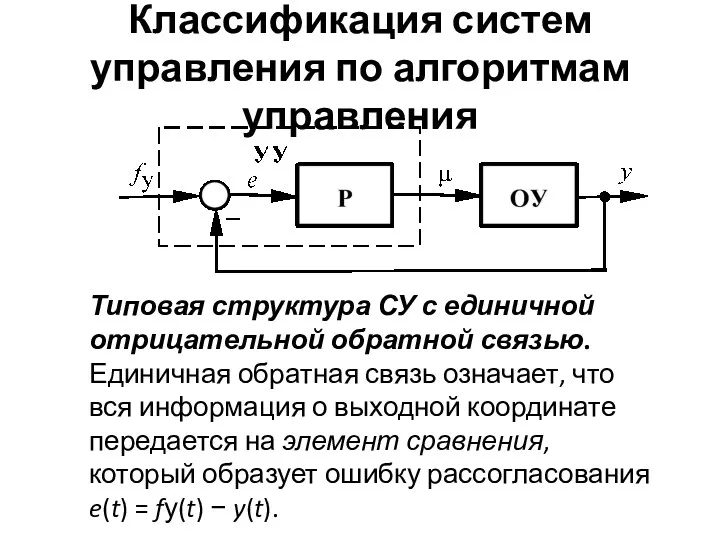
- 25. Классификация систем управления по алгоритмам управления Типовая структура СУ с единичной отрицательной обратной связью. Единичная обратная
- 26. Регулятор P на основе информации об ошибке, т. е. по величине рассогласования цели (задающего воздействия fу(t))
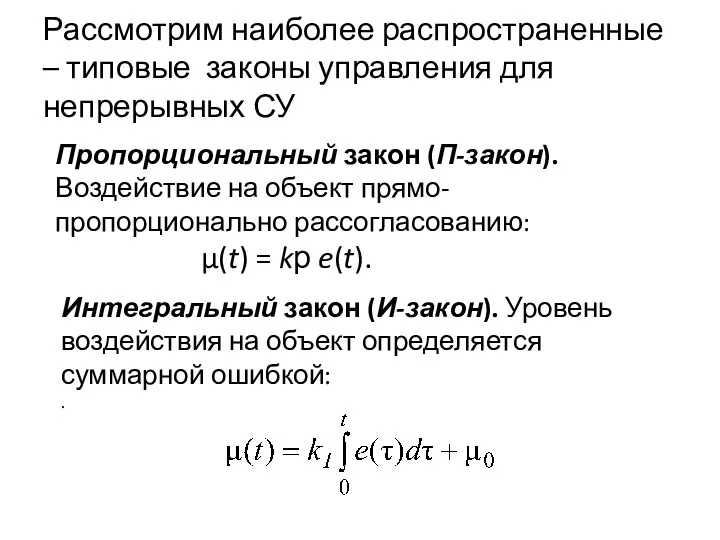
- 27. Рассмотрим наиболее распространенные – типовые законы управления для непрерывных СУ Пропорциональный закон (П-закон). Воздействие на объект
- 28. Если продифференцировать выражение, то получим соотношение dμ(t)/dt = kI e(t), которое показывает, что величина ошибки определяет
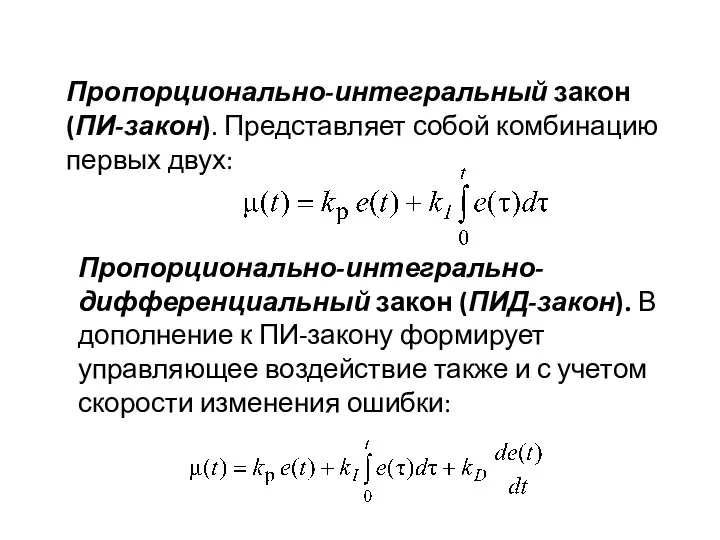
- 29. Пропорционально-интегральный закон (ПИ-закон). Представляет собой комбинацию первых двух: Пропорционально-интегрально-дифференциальный закон (ПИД-закон). В дополнение к ПИ-закону формирует
- 30. Классификация систем управления по энергетическому признаку В зависимости от того, не используется или используется дополнительная (сторонняя)
- 31. В системах непрямого управления функционально разделяются функции измерения (контроля за текущим состоянием процесса), принятия решения управляющим
- 32. 1.4. Поведение объектов и систем управления Теория управления оперирует математическими моделями объектов и СУ, которые описывают
- 33. Поведение объектов управления. Рассмотрим отдельно поведение судна как объекта управления без системы управления Будем считать, что
- 34. При прекращении действия возмущения (момент времени t1) новый установившийся курс ψуст не изменится; объект сам по
- 35. Рассмотрим другой объект – электродвигатель. Будем считать, что на холостом ходу (без нагрузки на валу) на
- 36. Это вызовет уменьшение скорости вращения, величина которой после окончания переходного процесса примет некоторое значение n1. После
- 37. Поведение систем управления. Каждый объект при функционировании должен иметь требуемое поведение. Для нейтрального и, тем более,
- 38. Реакция некоторой устойчивой СУ на входное управляющее воздействие, которое в момент времени t = 0 изменяется
- 39. Можно выделить две составляющие реакции СУ на входной сигнал: переходный режим (переходный процесс) и установившийся режим.
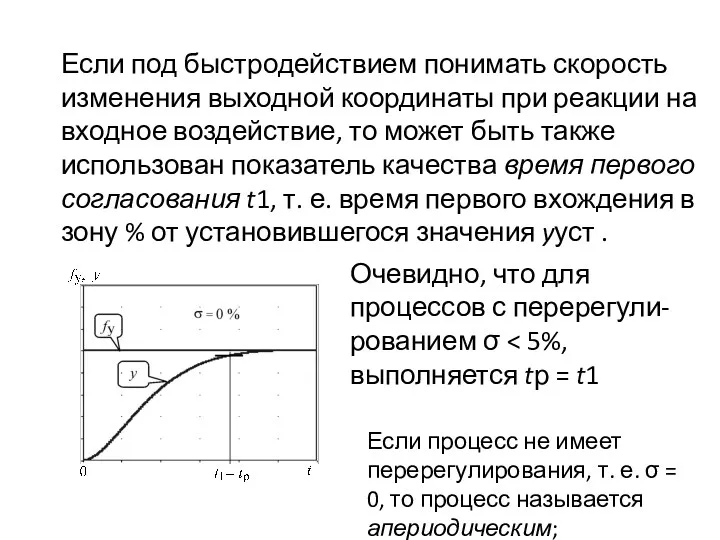
- 41. Если под быстродействием понимать скорость изменения выходной координаты при реакции на входное воздействие, то может быть
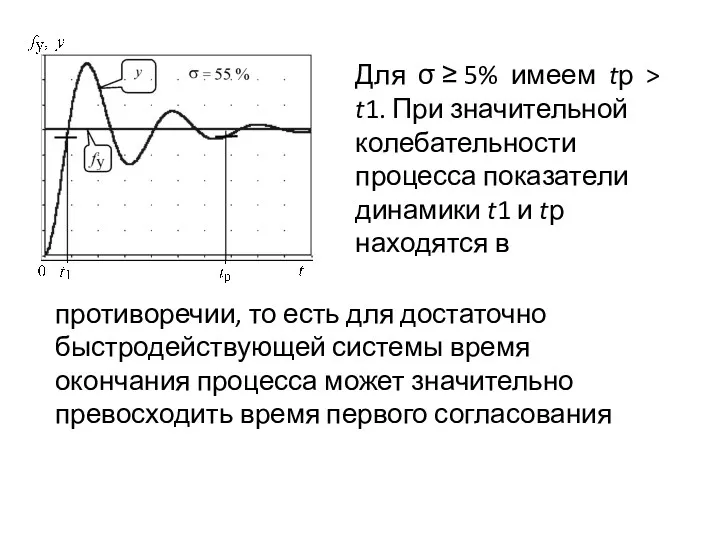
- 42. Для σ ≥ 5% имеем tр > t1. При значительной колебательности процесса показатели динамики t1 и
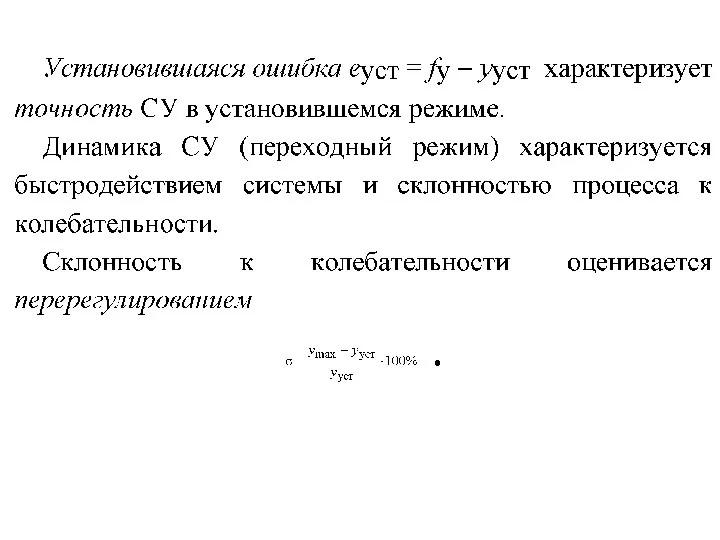
- 43. Показатели качества систем управления. Происходящие в динамических системах процессы оцениваются различными показателями качества (критериями), которые характеризуют
- 45. Скачать презентацию
1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ УПРАВЛЕНИЯ. ПРИНЦИПЫ УПРАВЛЕНИЯ.
1.1. Понятия об управлении и
1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ УПРАВЛЕНИЯ. ПРИНЦИПЫ УПРАВЛЕНИЯ. 1.1. Понятия об управлении и
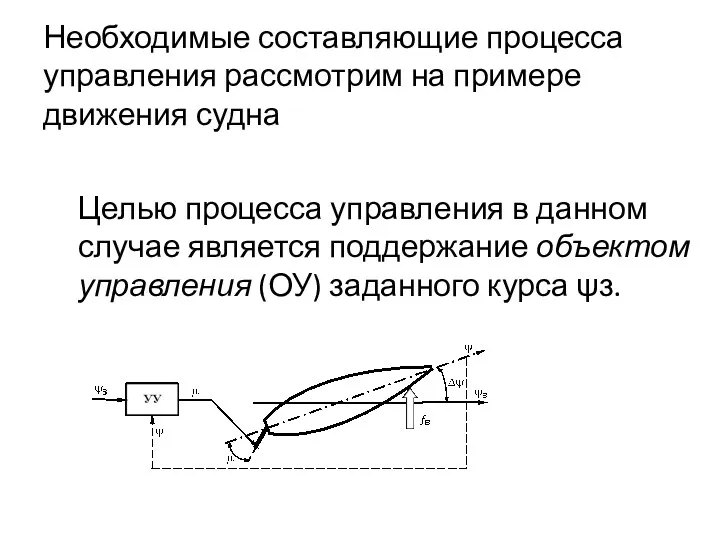
Необходимые составляющие процесса управления рассмотрим на примере движения судна
Целью процесса управления
Необходимые составляющие процесса управления рассмотрим на примере движения судна
Целью процесса управления
При движении ОУ (судно) подвергается возмущающему воздействию fв (волны, порывы ветра),
При движении ОУ (судно) подвергается возмущающему воздействию fв (волны, порывы ветра),
УУ “принимает решение”, т. е. вырабатывает управляющее воздействие на основе величины
УУ “принимает решение”, т. е. вырабатывает управляющее воздействие на основе величины
Рассмотренный пример содержит все необходимые аспекты, то есть все перечисленные ниже
Рассмотренный пример содержит все необходимые аспекты, то есть все перечисленные ниже
Отсутствие хотя бы одной из перечисленных составляющих или их неправильная организация
Отсутствие хотя бы одной из перечисленных составляющих или их неправильная организация
Для организации процесса управления конкретным объектом помимо УУ необходимы измерительные устройства
Для организации процесса управления конкретным объектом помимо УУ необходимы измерительные устройства
1.2. Принципы управления
Несмотря на многообразие ОУ, можно сформулировать лишь несколько основополагающих
1.2. Принципы управления
Несмотря на многообразие ОУ, можно сформулировать лишь несколько основополагающих
Принципы управления разделяются по способу контроля за текущим состоянием процесса управления.
1.Принцип
Принципы управления разделяются по способу контроля за текущим состоянием процесса управления.
1.Принцип
2.Принцип компенсации
При реализации принципа компенсации учет информации о текущем состоянии
2.Принцип компенсации
При реализации принципа компенсации учет информации о текущем состоянии
Структурной особенностью СУ, реализующих принцип компенсации, является наличие на структурной схеме
Очевидно, что влияние параметрических возмущений и неопределенность параметров операторов функциональных звеньев
Очевидно, что влияние параметрических возмущений и неопределенность параметров операторов функциональных звеньев
3.Принцип замкнутого управления
При реализации этого принципа учет информации о текущем состоянии
3.Принцип замкнутого управления
При реализации этого принципа учет информации о текущем состоянии
Структурной особенностью СУ, реализующих принцип замкнутого управления, является наличие на структурной
Структурной особенностью СУ, реализующих принцип замкнутого управления, является наличие на структурной

4.Принцип комбинированного управления
Этот принцип является комбинацией (объединением) принципов компенсации и замкнутого
4.Принцип комбинированного управления
Этот принцип является комбинацией (объединением) принципов компенсации и замкнутого
Существенной особенностью замкнутого управления является то обстоятельство, что не имеют значения причины,
Существенной особенностью замкнутого управления является то обстоятельство, что не имеют значения причины,
Следует отметить, что выработка УУ нового управляющего воздействия для реагирования на
Следует отметить, что выработка УУ нового управляющего воздействия для реагирования на
Комбинированный принцип целесообразно использовать при высоких требованиях к качеству процесса управления
1.3. Классификация систем управления
В основе любой классификации лежат признаки, по которым
1.3. Классификация систем управления
В основе любой классификации лежат признаки, по которым
Классификация систем управления по информационному признаку
В этом случае СУ подразделяются по
Классификация систем управления по информационному признаку
В этом случае СУ подразделяются по
Классификация систем управления по типу сигналов
Используемые в теории управления модели СУ
Классификация систем управления по типу сигналов
Используемые в теории управления модели СУ
Непрерывные системы. В них информация кодируется уровнем (значением) функции непрерывного времени
Непрерывные системы. В них информация кодируется уровнем (значением) функции непрерывного времени
На рис. б приведен пример квантования непрерывного сигнала с одинаковыми периодом
На рис. б приведен пример квантования непрерывного сигнала с одинаковыми периодом
Классификация систем управления по алгоритмам управления
Типовая структура СУ с единичной отрицательной
Классификация систем управления по алгоритмам управления
Типовая структура СУ с единичной отрицательной
Регулятор P на основе информации об ошибке, т. е. по величине
Регулятор P на основе информации об ошибке, т. е. по величине
Рассмотрим наиболее распространенные – типовые законы управления для непрерывных СУ
Пропорциональный закон
Рассмотрим наиболее распространенные – типовые законы управления для непрерывных СУ
Пропорциональный закон
Если продифференцировать выражение, то получим соотношение dμ(t)/dt = kI e(t), которое
Если продифференцировать выражение, то получим соотношение dμ(t)/dt = kI e(t), которое
Пропорционально-интегральный закон (ПИ-закон). Представляет собой комбинацию первых двух:
Пропорционально-интегрально-дифференциальный закон (ПИД-закон). В
Пропорционально-интегральный закон (ПИ-закон). Представляет собой комбинацию первых двух:
Пропорционально-интегрально-дифференциальный закон (ПИД-закон). В
Классификация систем управления по энергетическому признаку
В зависимости от того, не
Классификация систем управления по энергетическому признаку
В зависимости от того, не
В системах непрямого управления функционально разделяются функции измерения (контроля за текущим
В системах непрямого управления функционально разделяются функции измерения (контроля за текущим
1.4. Поведение объектов и систем управления
Теория управления оперирует математическими моделями объектов
1.4. Поведение объектов и систем управления
Теория управления оперирует математическими моделями объектов
Поведение объектов управления. Рассмотрим отдельно поведение судна как объекта управления без
Поведение объектов управления. Рассмотрим отдельно поведение судна как объекта управления без
При прекращении действия возмущения (момент времени t1) новый установившийся курс ψуст
При прекращении действия возмущения (момент времени t1) новый установившийся курс ψуст
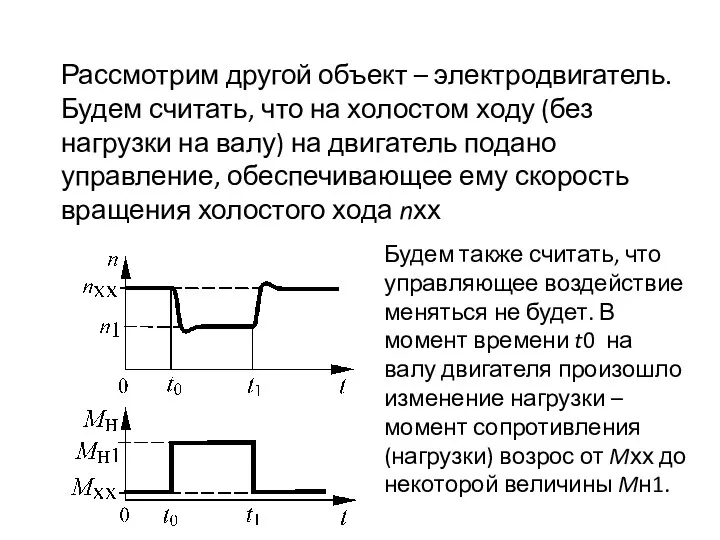
Рассмотрим другой объект – электродвигатель. Будем считать, что на холостом ходу
Рассмотрим другой объект – электродвигатель. Будем считать, что на холостом ходу
Это вызовет уменьшение скорости вращения, величина которой после окончания переходного процесса
Это вызовет уменьшение скорости вращения, величина которой после окончания переходного процесса
Поведение систем управления. Каждый объект при функционировании должен иметь требуемое поведение.
Поведение систем управления. Каждый объект при функционировании должен иметь требуемое поведение.
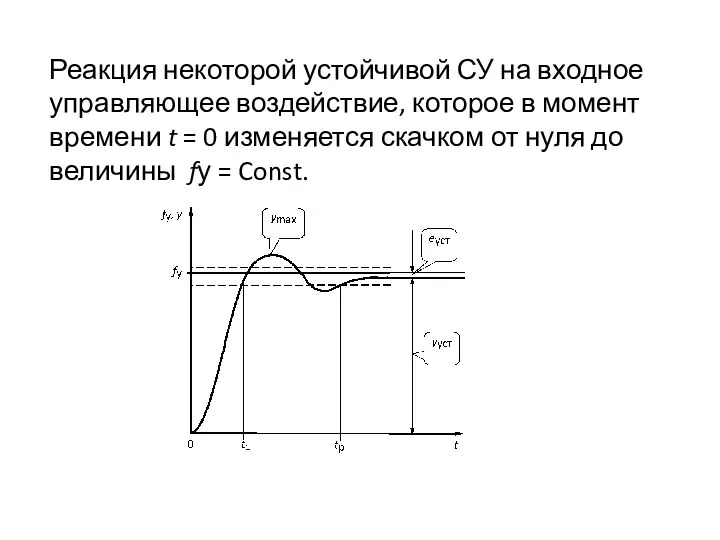
Реакция некоторой устойчивой СУ на входное управляющее воздействие, которое в момент
Реакция некоторой устойчивой СУ на входное управляющее воздействие, которое в момент
Можно выделить две составляющие реакции СУ на входной сигнал: переходный режим
Можно выделить две составляющие реакции СУ на входной сигнал: переходный режим
Если под быстродействием понимать скорость изменения выходной координаты при реакции на
Если под быстродействием понимать скорость изменения выходной координаты при реакции на
Для σ ≥ 5% имеем tр > t1. При значительной колебательности
Для σ ≥ 5% имеем tр > t1. При значительной колебательности
Показатели качества систем управления. Происходящие в динамических системах процессы оцениваются различными
Показатели качества систем управления. Происходящие в динамических системах процессы оцениваются различными
 Урок-игра по России
Урок-игра по России Знаки препинания в сложноподчинённых предложениях с несколькими придаточными
Знаки препинания в сложноподчинённых предложениях с несколькими придаточными Механизация приготовления зеленых и грубых кормов
Механизация приготовления зеленых и грубых кормов Великая Отечественная война
Великая Отечественная война Сазанқұрақ кен орнындағы мұнай дайындау қондырғыларында кездесетін коррозия шөгінділерімен күресу жолдарын зерттеу
Сазанқұрақ кен орнындағы мұнай дайындау қондырғыларында кездесетін коррозия шөгінділерімен күресу жолдарын зерттеу Теоретические основы технологии неорганических веществ. Химическое производство. (Тема 1)
Теоретические основы технологии неорганических веществ. Химическое производство. (Тема 1) Десятичные дроби. Исторический материал
Десятичные дроби. Исторический материал Клинико-лабораторные проявления респираторного дистресс-синдрома
Клинико-лабораторные проявления респираторного дистресс-синдрома Вулканы Камчатки
Вулканы Камчатки Депрессия в практике общего врача
Депрессия в практике общего врача Альтернативные источники электроэнергии, применяемые для энергообеспечения г. Москвы. Солнечные батареи.
Альтернативные источники электроэнергии, применяемые для энергообеспечения г. Москвы. Солнечные батареи. Портфолио учителя начальных классов
Портфолио учителя начальных классов определение Степени с целым отрицательным показателем
определение Степени с целым отрицательным показателем Асимметричность информации и отношения принципал-агент
Асимметричность информации и отношения принципал-агент Самые красивые и необычные библиотеки мира
Самые красивые и необычные библиотеки мира Гигиена окружающей среды. Атмосферный воздух. Его химические и физические свойства. Гигиеническое и экологическое значение
Гигиена окружающей среды. Атмосферный воздух. Его химические и физические свойства. Гигиеническое и экологическое значение Элементы поражения, патологические процессы, возникающие на ней
Элементы поражения, патологические процессы, возникающие на ней Парадокс близнецов
Парадокс близнецов Организация научного исследования
Организация научного исследования Prezentatsia_vkr_gotovaya (1)
Prezentatsia_vkr_gotovaya (1) Круглые тела. Цилиндр, конус, шар
Круглые тела. Цилиндр, конус, шар Очень просто добрым быть
Очень просто добрым быть Монтаж и эксплуатация бурового оборудования. Основные определения и классификация. Лекция 1
Монтаж и эксплуатация бурового оборудования. Основные определения и классификация. Лекция 1 Презентация Исследовательский проект Широкая масленица
Презентация Исследовательский проект Широкая масленица Весенние первоцветы
Весенние первоцветы Числа и величины. Планируемые результаты
Числа и величины. Планируемые результаты Налог на доходы физических лиц
Налог на доходы физических лиц Предварительно-напряженные листовые металлические конструкции
Предварительно-напряженные листовые металлические конструкции