- Устойчивость цифровых САР

Содержание
- 2. Но является периодической функцией мнимой части q с периодом 2π. При исследовании устойчивости в плоскости q
- 3. Для устойчивости импульсной САР необходимо, чтобы корни её характеристического уравнения находились во внутренней части окружности единичного
- 4. СИНТЕЗ ЦИФРОВЫХ ЭМС В большинстве электромеханических систем автоматического управления объект управления имеет непрерывный (аналоговый) характер. Однако,
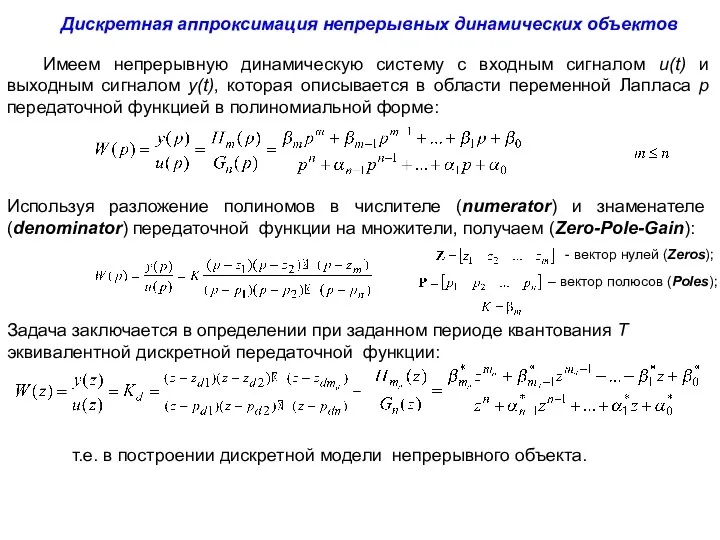
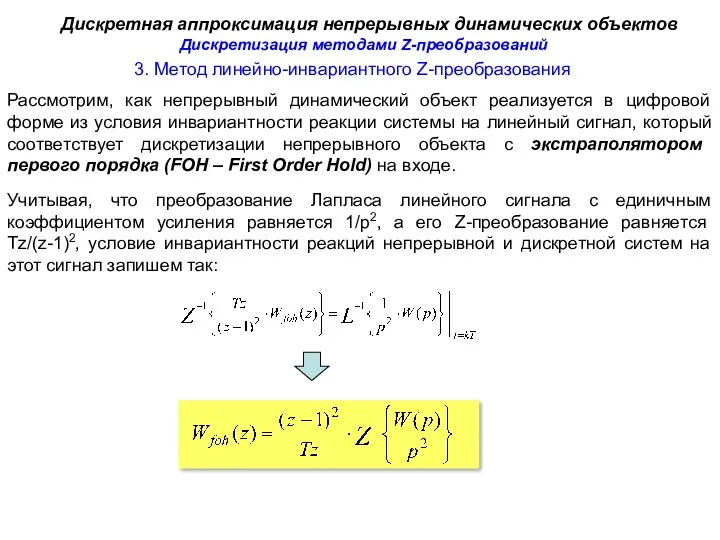
- 5. Дискретная аппроксимация непрерывных динамических объектов Имеем непрерывную динамическую систему с входным сигналом u(t) и выходным сигналом
- 6. Под эквивалентностью в данном случае понимают совпадение реакций непрерывной системы и её дискретной модели на какое-либо
- 7. Задача не имеет точного решения. Дискретная аппроксимация непрерывных динамических объектов При дискретизации входного сигнала теряется информация
- 8. Дискретная аппроксимация непрерывных динамических объектов К приближенным методам относится и метод соответствия нулей-полюсов. Это связано с
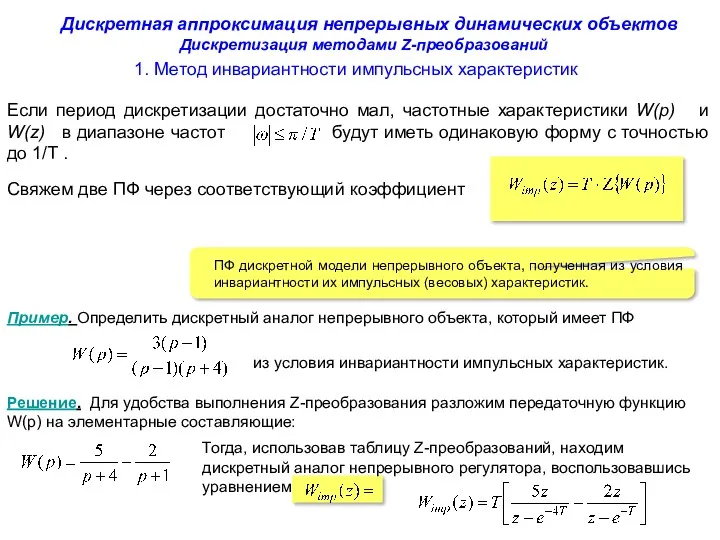
- 9. 1. Метод инвариантности импульсных характеристик Дискретная аппроксимация непрерывных динамических объектов Если период дискретизации достаточно мал, частотные
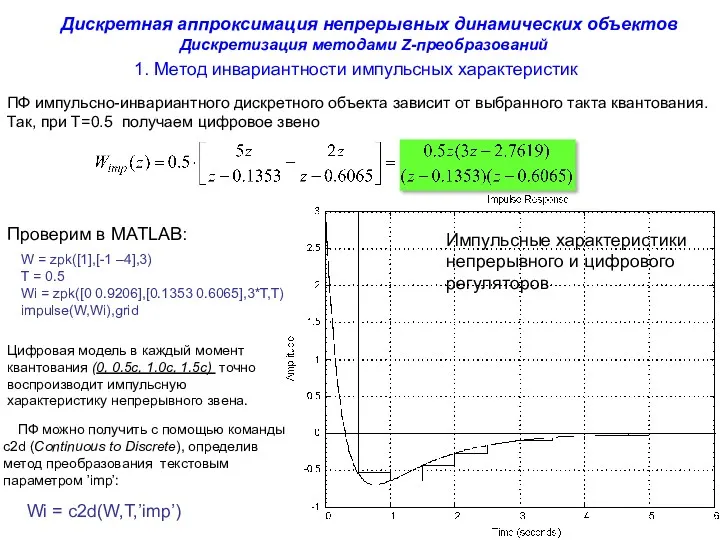
- 10. 1. Метод инвариантности импульсных характеристик Дискретная аппроксимация непрерывных динамических объектов ПФ импульсно-инвариантного дискретного объекта зависит от
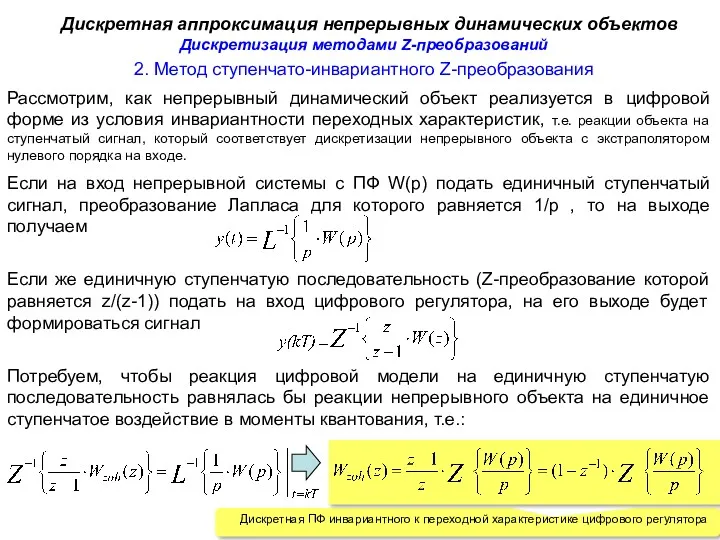
- 11. 2. Метод ступенчато-инвариантного Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Рассмотрим, как непрерывный динамический объект реализуется в
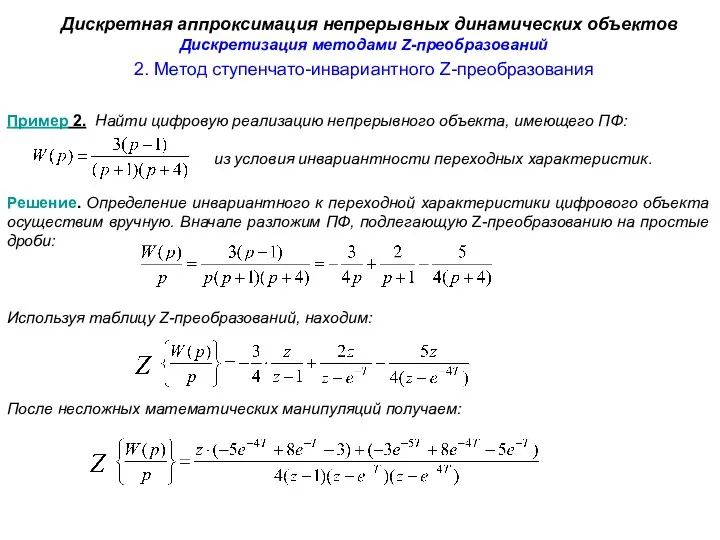
- 12. 2. Метод ступенчато-инвариантного Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Пример 2. Найти цифровую реализацию непрерывного объекта,
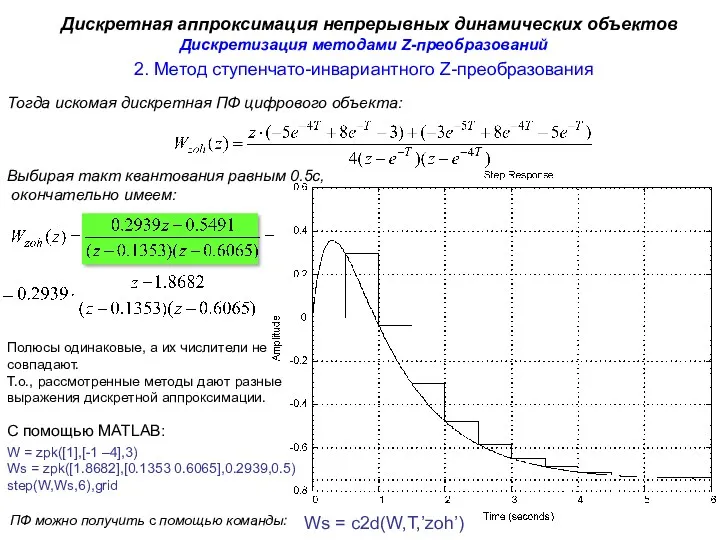
- 13. 2. Метод ступенчато-инвариантного Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Тогда искомая дискретная ПФ цифрового объекта: Выбирая
- 14. 3. Метод линейно-инвариантного Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Рассмотрим, как непрерывный динамический объект реализуется в
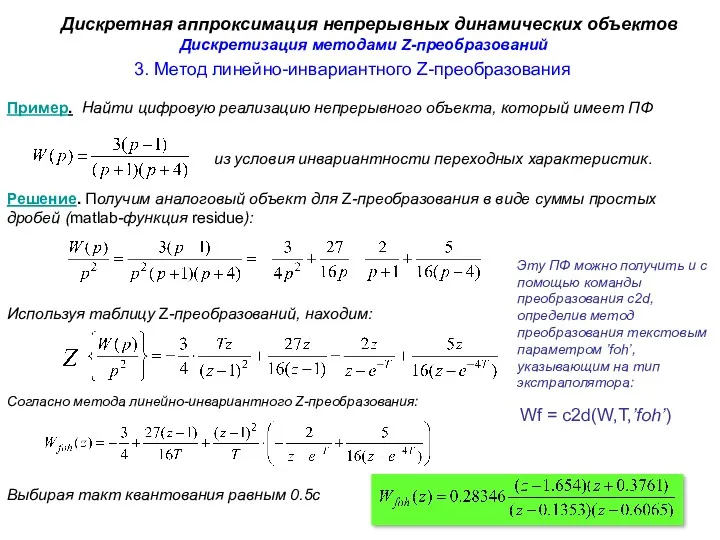
- 15. Пример. Найти цифровую реализацию непрерывного объекта, который имеет ПФ 3. Метод линейно-инвариантного Z-преобразования Дискретная аппроксимация непрерывных
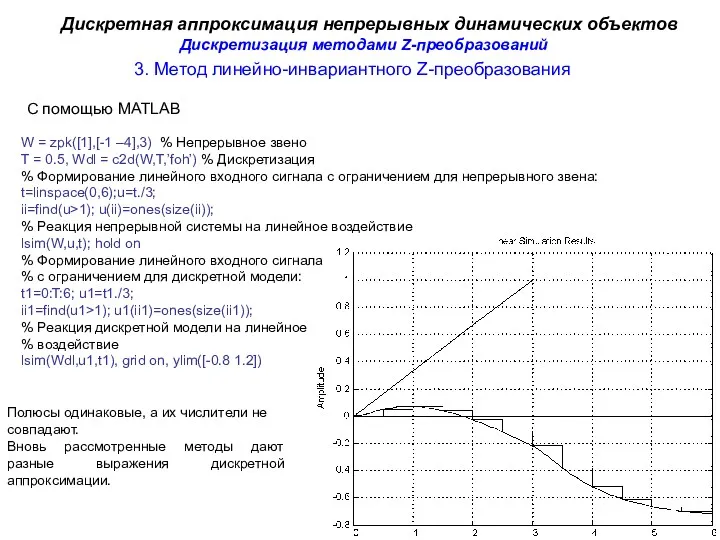
- 16. 3. Метод линейно-инвариантного Z-преобразования Дискретная аппроксимация непрерывных динамических объектов С помощью MATLAB W = zpk([1],[-1 –4],3)
- 17. Сравнительный анализ результатов дискретизации методами Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Рассмотрено 3 разных способа дискретизации
- 18. В качестве непрерывного объекта выберем объект с ПФ Сравнительный анализ результатов дискретизации методами Z-преобразования Дискретная аппроксимация
- 19. Сравнительный анализ результатов дискретизации методами Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Весовые функции выходной непрерывной системы
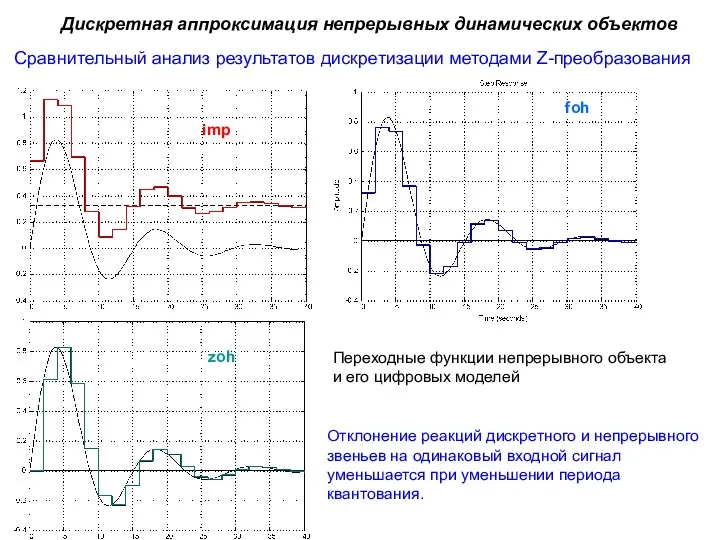
- 20. Сравнительный анализ результатов дискретизации методами Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Переходные функции непрерывного объекта и
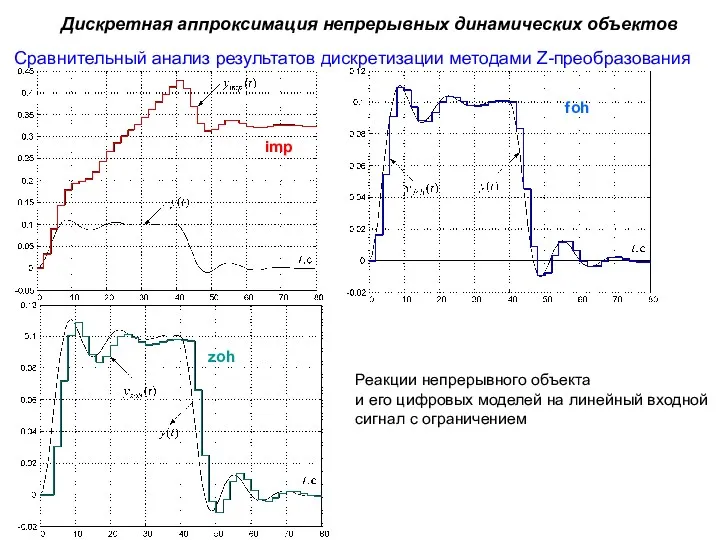
- 21. Сравнительный анализ результатов дискретизации методами Z-преобразования Дискретная аппроксимация непрерывных динамических объектов Реакции непрерывного объекта и его
- 22. Значения весовой функции цифровой модели, синтезированной с помощью импульсно-инвариантного Z-преобразования, на каждом интервале дискретности совпадают со
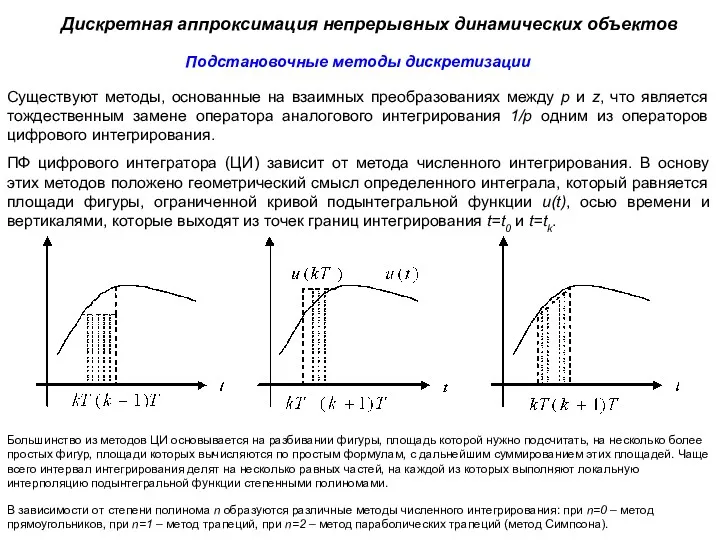
- 23. Дискретная аппроксимация непрерывных динамических объектов Подстановочные методы дискретизации Существуют методы, основанные на взаимных преобразованиях между p
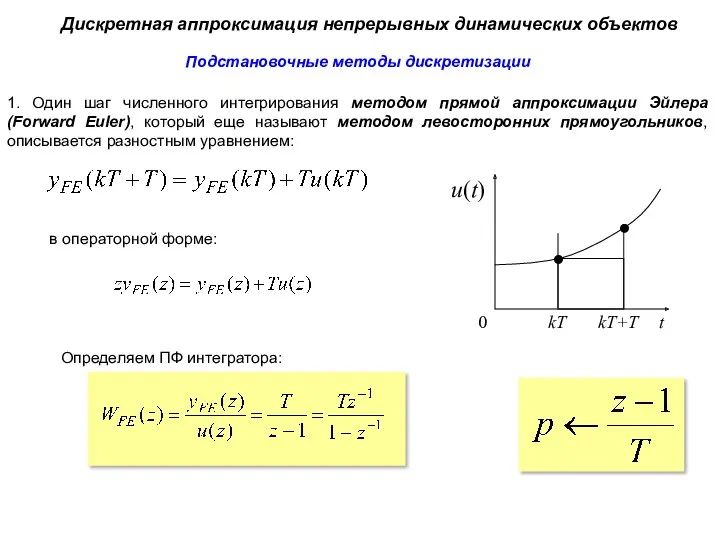
- 24. Дискретная аппроксимация непрерывных динамических объектов Подстановочные методы дискретизации 1. Один шаг численного интегрирования методом прямой аппроксимации
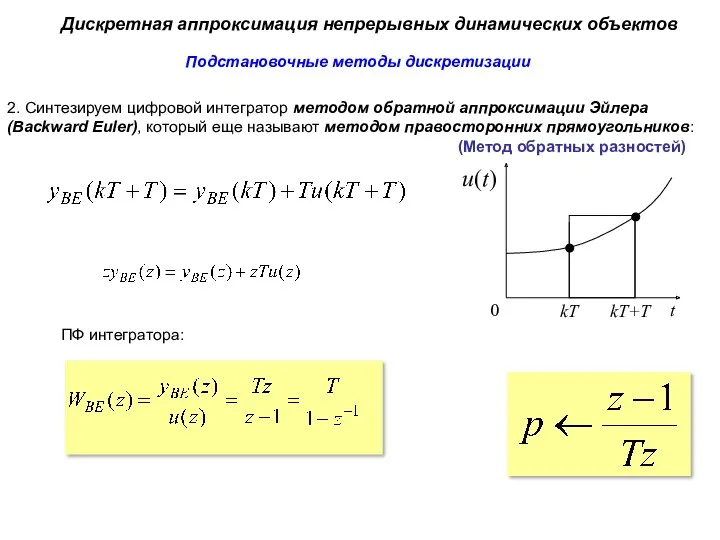
- 25. Дискретная аппроксимация непрерывных динамических объектов Подстановочные методы дискретизации 2. Cинтезируем цифровой интегратор методом обратной аппроксимации Эйлера
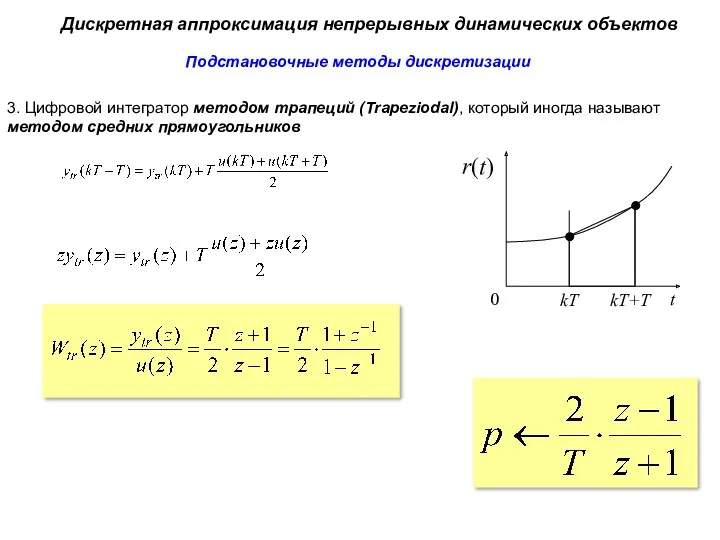
- 26. Дискретная аппроксимация непрерывных динамических объектов Подстановочные методы дискретизации 3. Цифровой интегратор методом трапеций (Trapeziodal), который иногда
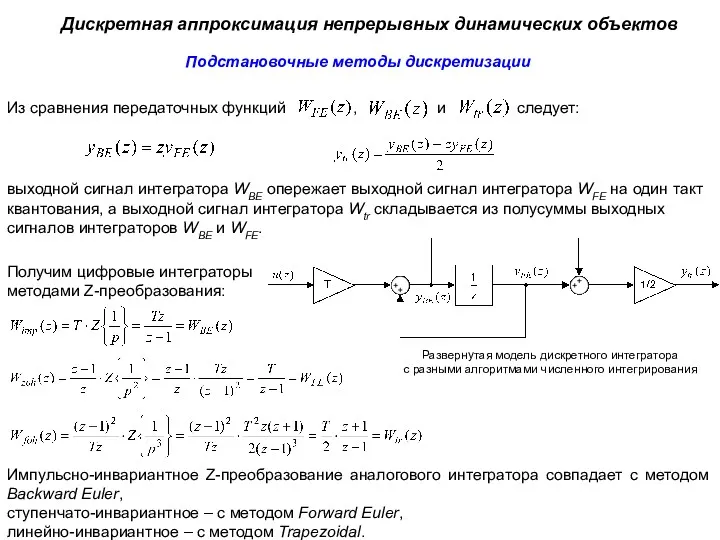
- 27. Дискретная аппроксимация непрерывных динамических объектов Подстановочные методы дискретизации Из сравнения передаточных функций , и следует: выходной
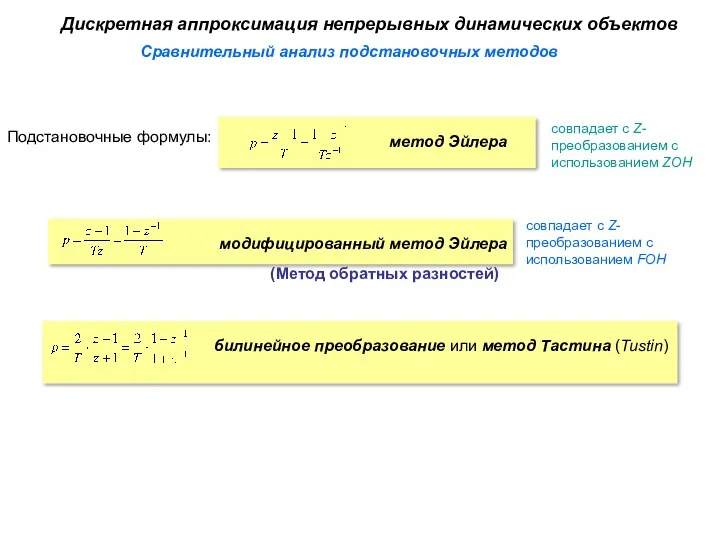
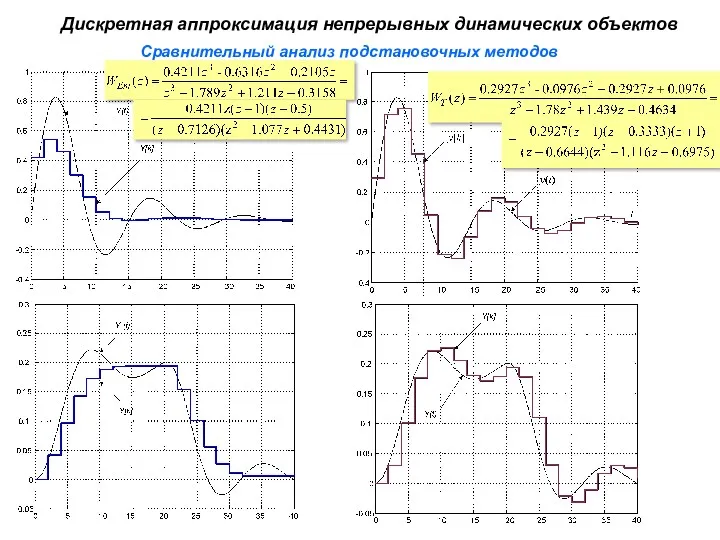
- 28. Сравнительный анализ подстановочных методов Дискретная аппроксимация непрерывных динамических объектов Подстановочные формулы: метод Эйлера модифицированный метод Эйлера
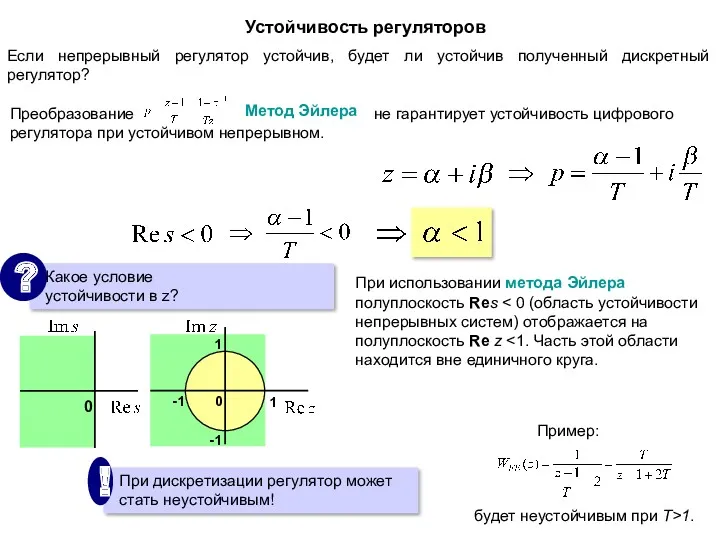
- 29. Устойчивость регуляторов Преобразование не гарантирует устойчивость цифрового регулятора при устойчивом непрерывном. Метод Эйлера будет неустойчивым при
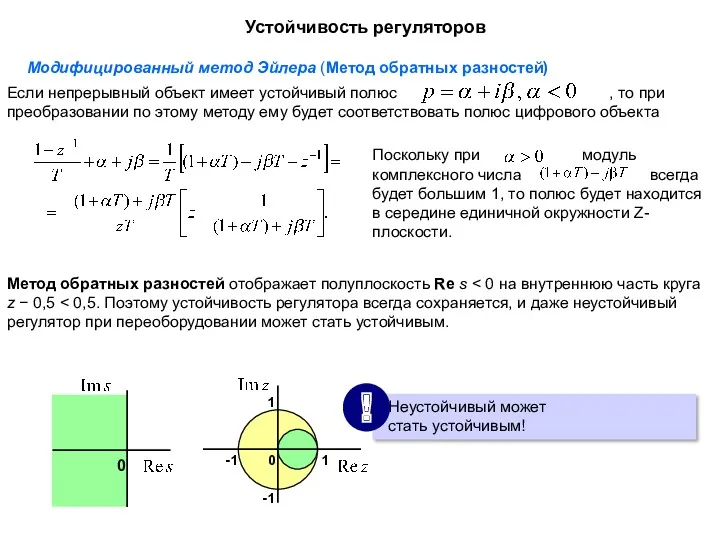
- 30. Устойчивость регуляторов Модифицированный метод Эйлера (Метод обратных разностей) Метод обратных разностей отображает полуплоскость Re s Если
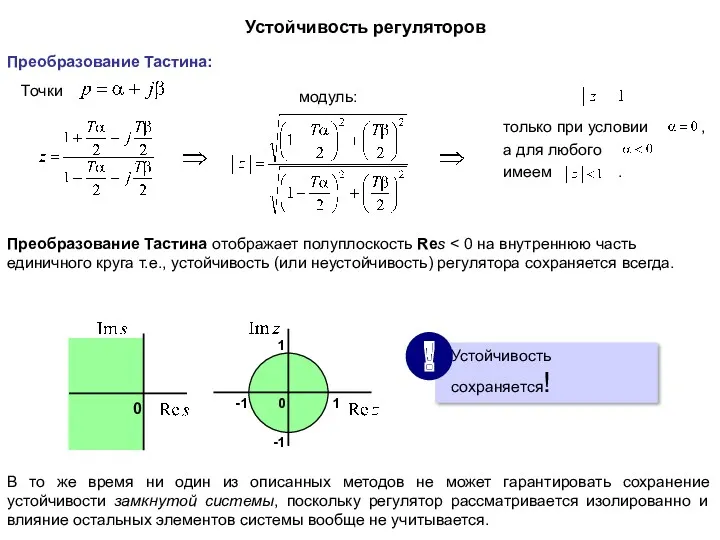
- 31. Устойчивость регуляторов Преобразование Тастина отображает полуплоскость Res В то же время ни один из описанных методов
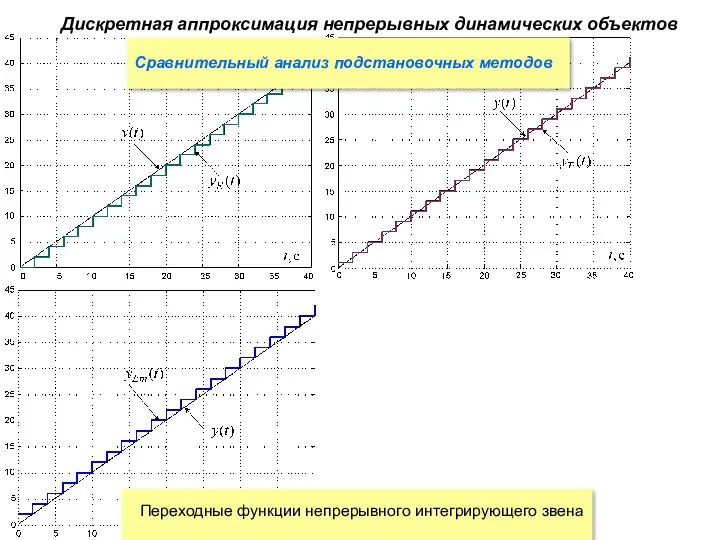
- 32. Дискретная аппроксимация непрерывных динамических объектов Сравнительный анализ подстановочных методов Переходные функции непрерывного интегрирующего звена
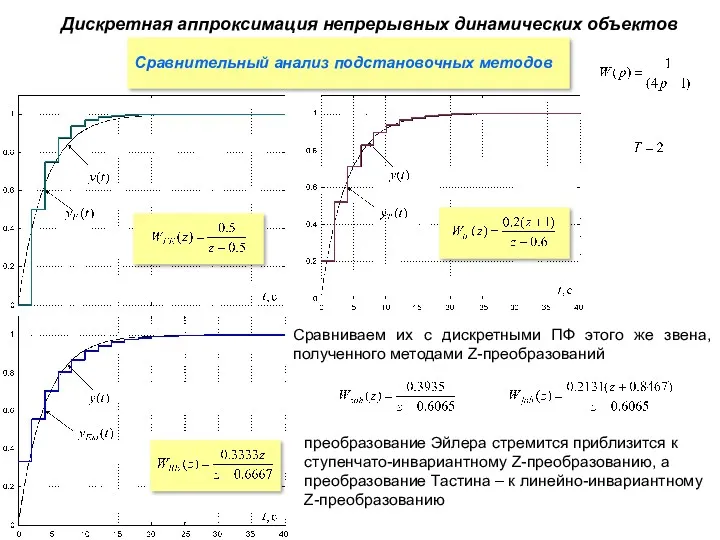
- 33. Дискретная аппроксимация непрерывных динамических объектов Сравнительный анализ подстановочных методов Сравниваем их с дискретными ПФ этого же
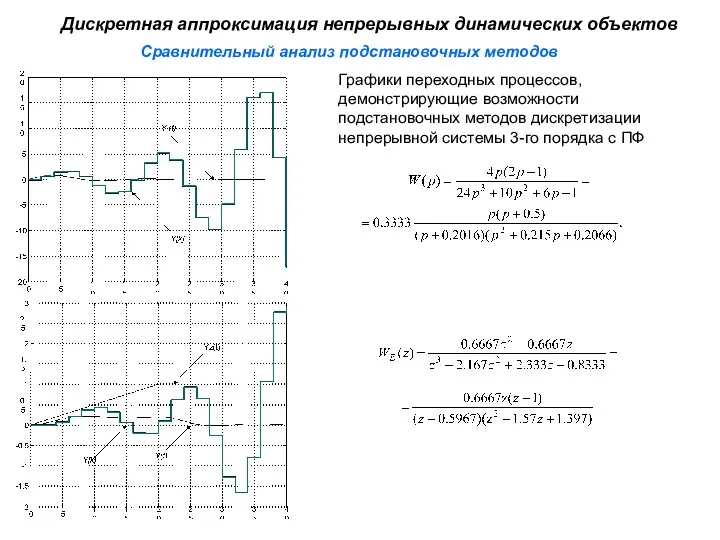
- 34. Сравнительный анализ подстановочных методов Дискретная аппроксимация непрерывных динамических объектов Графики переходных процессов, демонстрирующие возможности подстановочных методов
- 35. Сравнительный анализ подстановочных методов Дискретная аппроксимация непрерывных динамических объектов
- 36. Сравнительный анализ подстановочных методов Дискретная аппроксимация непрерывных динамических объектов Выводы: нули и полюса всех подстановочных преобразований
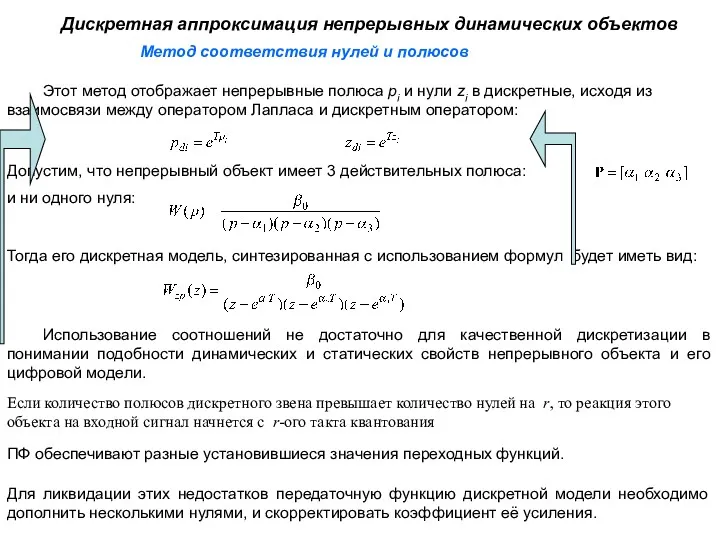
- 37. Метод соответствия нулей и полюсов Дискретная аппроксимация непрерывных динамических объектов Этот метод отображает непрерывные полюса pi
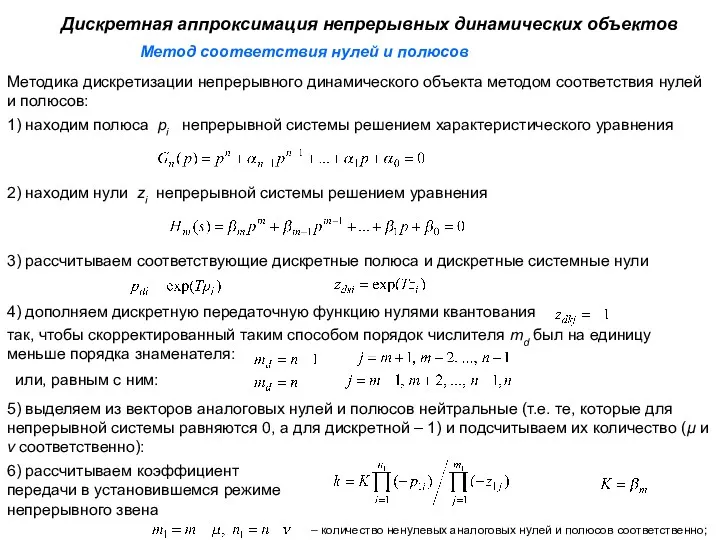
- 38. Метод соответствия нулей и полюсов Дискретная аппроксимация непрерывных динамических объектов Методика дискретизации непрерывного динамического объекта методом
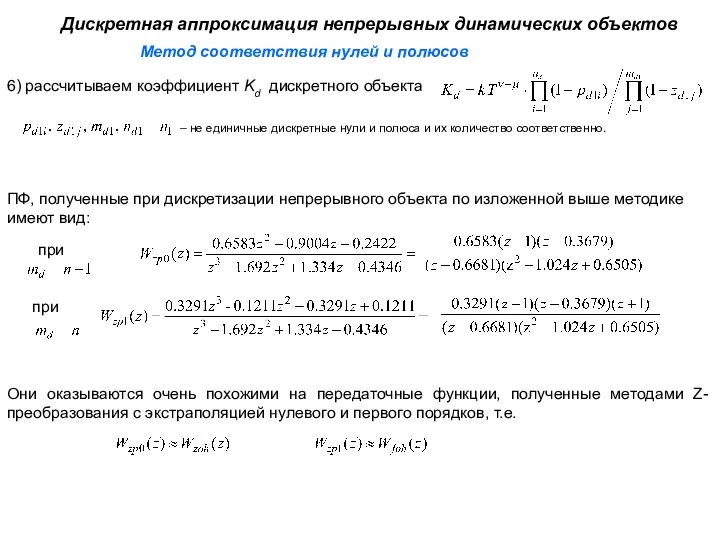
- 39. Метод соответствия нулей и полюсов Дискретная аппроксимация непрерывных динамических объектов 6) рассчитываем коэффициент Kd дискретного объекта
- 40. Метод соответствия нулей и полюсов Дискретная аппроксимация непрерывных динамических объектов Переходные функции непрерывной системы и её
- 41. Метод соответствия нулей и полюсов Дискретная аппроксимация непрерывных динамических объектов Реакция непрерывной системы и её дискретных
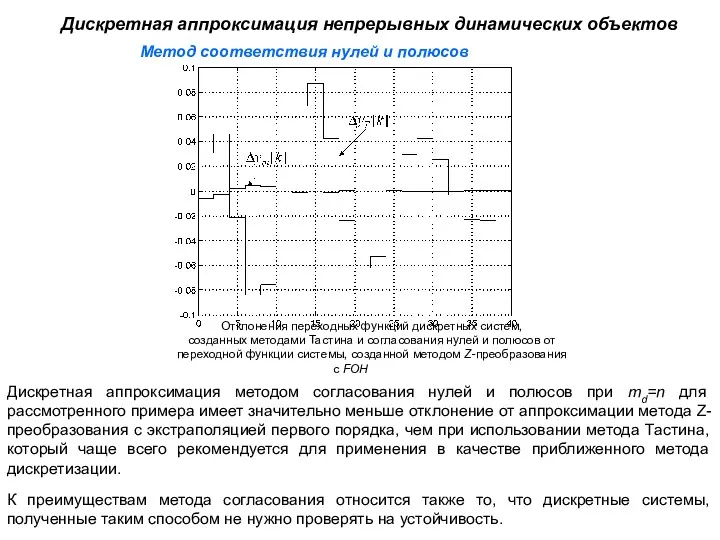
- 42. Метод соответствия нулей и полюсов Дискретная аппроксимация непрерывных динамических объектов Дискретная аппроксимация методом согласования нулей и
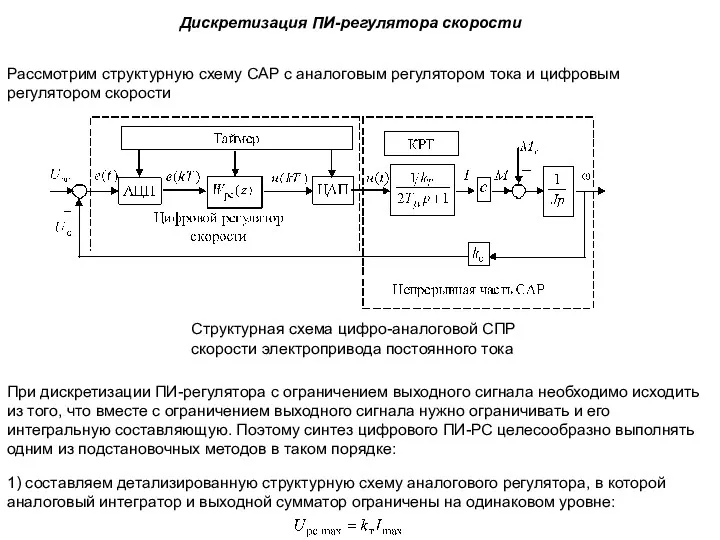
- 43. Дискретизация ПИ-регулятора скорости Рассмотрим структурную схему САР с аналоговым регулятором тока и цифровым регулятором скорости При
- 44. 2) заменяем непрерывный интегратор с ограничением одним из рассмотренных выше цифровых интеграторов с ограничением. Дискретизация ПИ-регулятора
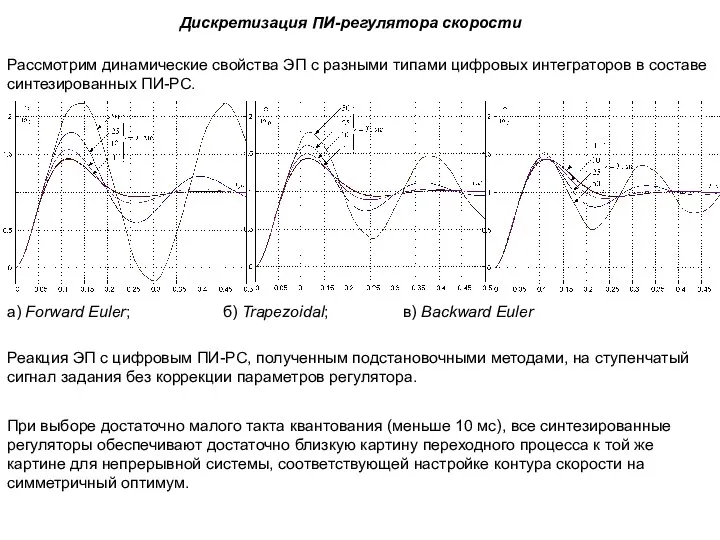
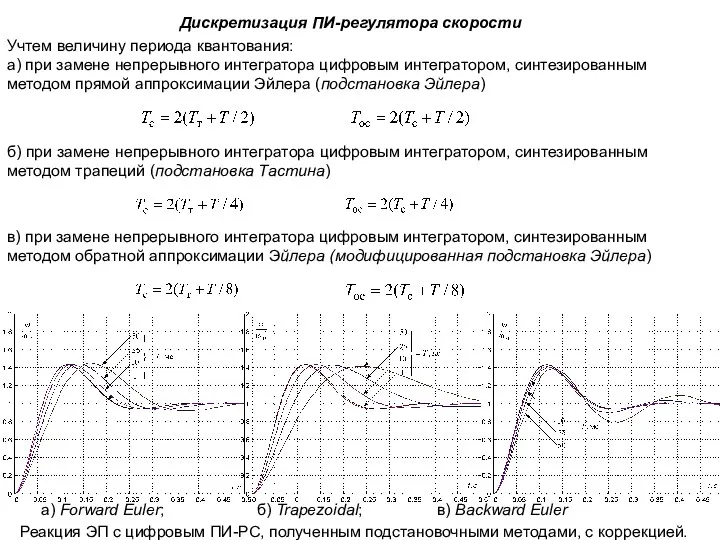
- 45. Дискретизация ПИ-регулятора скорости Рассмотрим динамические свойства ЭП с разными типами цифровых интеграторов в составе синтезированных ПИ-РС.
- 46. Дискретизация ПИ-регулятора скорости б) при замене непрерывного интегратора цифровым интегратором, синтезированным методом трапеций (подстановка Тастина) в)
- 47. Перерегулирование при возрастании периода дискретности остается почти неизменным, сопровождаясь, однако, уменьшением быстродействия. Дискретизация ПИ-регулятора скорости Наиболее
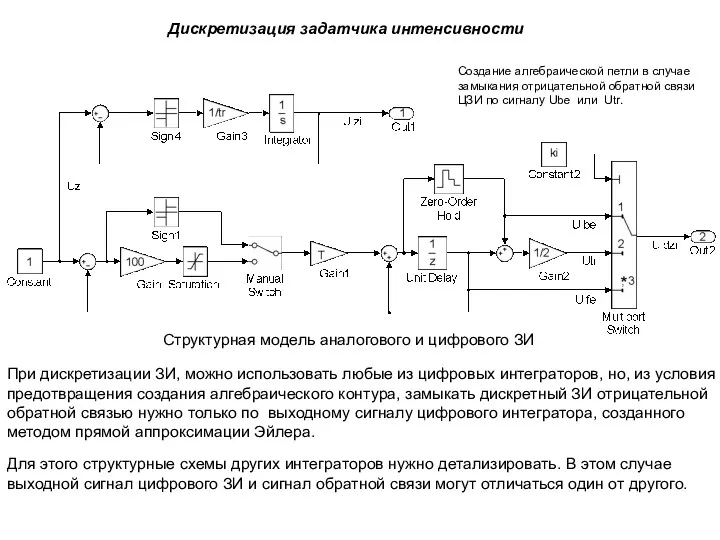
- 48. Дискретизация задатчика интенсивности Структурная модель аналогового и цифрового ЗИ При дискретизации ЗИ, можно использовать любые из
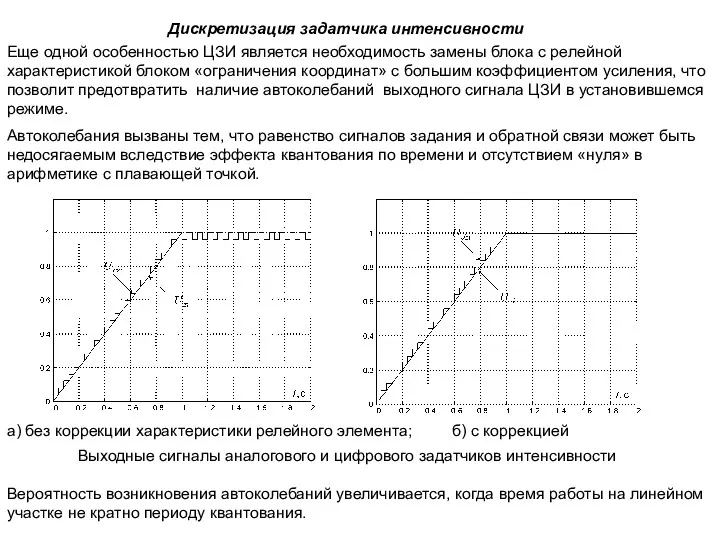
- 49. Дискретизация задатчика интенсивности Выходные сигналы аналогового и цифрового задатчиков интенсивности Еще одной особенностью ЦЗИ является необходимость
- 50. Дискретизация фильтра на выходе задатчика интенсивности Результаты фильтрации тремя синтезированными дискретными фильтрами при T=0.05c. Наилучшие результаты
- 52. Скачать презентацию
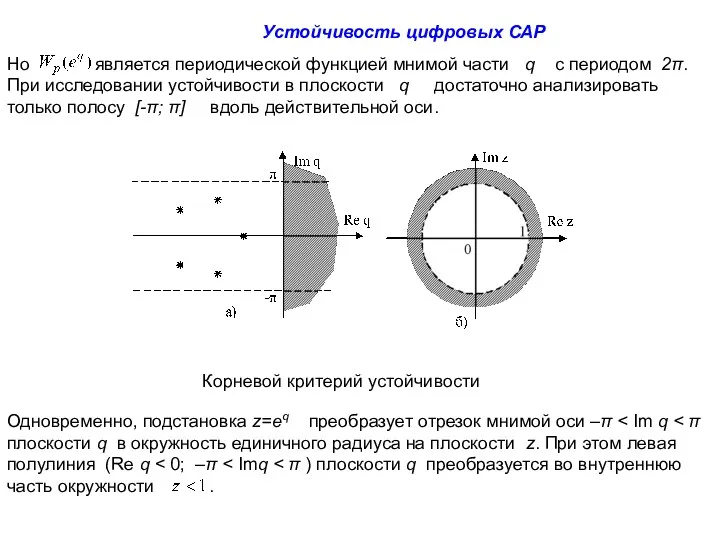
Но является периодической функцией мнимой части q с периодом 2π. При
Но является периодической функцией мнимой части q с периодом 2π. При
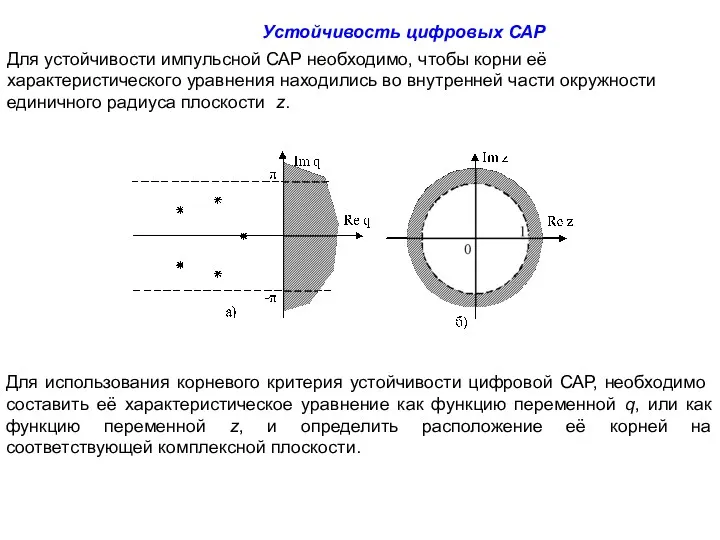
Для устойчивости импульсной САР необходимо, чтобы корни её характеристического уравнения находились
Для устойчивости импульсной САР необходимо, чтобы корни её характеристического уравнения находились
СИНТЕЗ ЦИФРОВЫХ ЭМС
В большинстве электромеханических систем автоматического управления объект управления
СИНТЕЗ ЦИФРОВЫХ ЭМС
В большинстве электромеханических систем автоматического управления объект управления
Дискретная аппроксимация непрерывных динамических объектов
Имеем непрерывную динамическую систему с входным
Дискретная аппроксимация непрерывных динамических объектов
Имеем непрерывную динамическую систему с входным
Под эквивалентностью в данном случае понимают совпадение реакций непрерывной системы и
Под эквивалентностью в данном случае понимают совпадение реакций непрерывной системы и
Задача не имеет точного решения.
Дискретная аппроксимация непрерывных динамических объектов
При
Задача не имеет точного решения.
Дискретная аппроксимация непрерывных динамических объектов
При
Дискретная аппроксимация непрерывных динамических объектов
К приближенным методам относится и метод
Дискретная аппроксимация непрерывных динамических объектов
К приближенным методам относится и метод
1. Метод инвариантности импульсных характеристик
Дискретная аппроксимация непрерывных динамических объектов
Если
1. Метод инвариантности импульсных характеристик
Дискретная аппроксимация непрерывных динамических объектов
Если
1. Метод инвариантности импульсных характеристик
Дискретная аппроксимация непрерывных динамических объектов
ПФ
1. Метод инвариантности импульсных характеристик
Дискретная аппроксимация непрерывных динамических объектов
ПФ
2. Метод ступенчато-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Рассмотрим, как
2. Метод ступенчато-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Рассмотрим, как
2. Метод ступенчато-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Пример 2.
2. Метод ступенчато-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Пример 2.
2. Метод ступенчато-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Тогда искомая
2. Метод ступенчато-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Тогда искомая
3. Метод линейно-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Рассмотрим, как
3. Метод линейно-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Рассмотрим, как
Пример. Найти цифровую реализацию непрерывного объекта, который имеет ПФ
3. Метод линейно-инвариантного
Пример. Найти цифровую реализацию непрерывного объекта, который имеет ПФ
3. Метод линейно-инвариантного
3. Метод линейно-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
С помощью
3. Метод линейно-инвариантного Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
С помощью
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
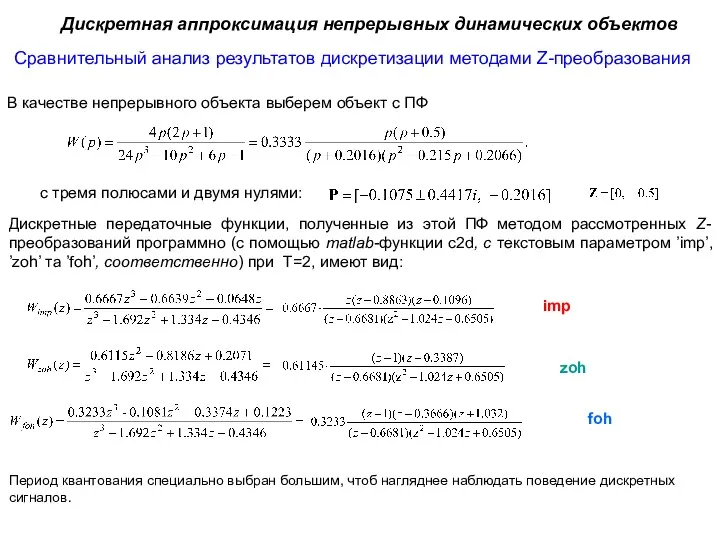
В качестве непрерывного объекта выберем объект с ПФ
Сравнительный анализ результатов
В качестве непрерывного объекта выберем объект с ПФ
Сравнительный анализ результатов

Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ результатов дискретизации методами Z-преобразования
Дискретная аппроксимация непрерывных динамических объектов
Значения весовой функции цифровой модели, синтезированной с помощью импульсно-инвариантного Z-преобразования, на
Значения весовой функции цифровой модели, синтезированной с помощью импульсно-инвариантного Z-преобразования, на
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
Существуют методы, основанные на
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
Существуют методы, основанные на
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
1. Один шаг численного
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
1. Один шаг численного
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
2. Cинтезируем цифровой интегратор
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
2. Cинтезируем цифровой интегратор
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
3. Цифровой интегратор методом
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
3. Цифровой интегратор методом
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
Из сравнения передаточных функций
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные методы дискретизации
Из сравнения передаточных функций
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные формулы:
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Подстановочные формулы:
Устойчивость регуляторов
Преобразование не гарантирует устойчивость цифрового регулятора при устойчивом непрерывном.
Метод
Устойчивость регуляторов
Преобразование не гарантирует устойчивость цифрового регулятора при устойчивом непрерывном.
Метод
Устойчивость регуляторов
Модифицированный метод Эйлера (Метод обратных разностей)
Метод обратных разностей отображает полуплоскость
Устойчивость регуляторов
Модифицированный метод Эйлера (Метод обратных разностей)
Метод обратных разностей отображает полуплоскость
Устойчивость регуляторов
Преобразование Тастина отображает полуплоскость Res < 0 на внутреннюю часть
Устойчивость регуляторов
Преобразование Тастина отображает полуплоскость Res < 0 на внутреннюю часть
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ подстановочных методов
Переходные функции
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ подстановочных методов
Переходные функции
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ подстановочных методов
Сравниваем их
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ подстановочных методов
Сравниваем их
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Графики переходных
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Графики переходных
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов

Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Выводы:
нули и
Сравнительный анализ подстановочных методов
Дискретная аппроксимация непрерывных динамических объектов
Выводы:
нули и
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Этот
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Этот
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Методика
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Методика
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
6)
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
6)

Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Переходные
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Переходные

Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Реакция
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Реакция
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Дискретная
Метод соответствия нулей и полюсов
Дискретная аппроксимация непрерывных динамических объектов
Дискретная
Дискретизация ПИ-регулятора скорости
Рассмотрим структурную схему САР с аналоговым регулятором тока
Дискретизация ПИ-регулятора скорости
Рассмотрим структурную схему САР с аналоговым регулятором тока
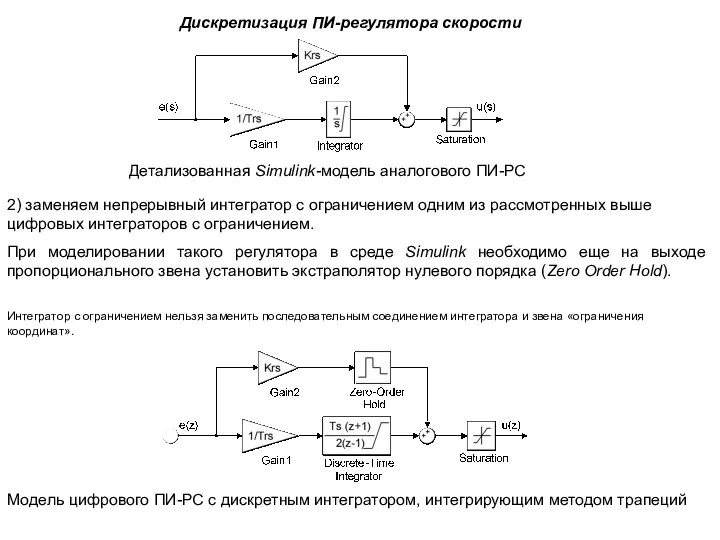
2) заменяем непрерывный интегратор с ограничением одним из рассмотренных выше цифровых
2) заменяем непрерывный интегратор с ограничением одним из рассмотренных выше цифровых
Дискретизация ПИ-регулятора скорости
Рассмотрим динамические свойства ЭП с разными типами цифровых
Дискретизация ПИ-регулятора скорости
Рассмотрим динамические свойства ЭП с разными типами цифровых
Дискретизация ПИ-регулятора скорости
б) при замене непрерывного интегратора цифровым интегратором, синтезированным
Дискретизация ПИ-регулятора скорости
б) при замене непрерывного интегратора цифровым интегратором, синтезированным
Перерегулирование при возрастании периода дискретности остается почти неизменным, сопровождаясь, однако, уменьшением
Перерегулирование при возрастании периода дискретности остается почти неизменным, сопровождаясь, однако, уменьшением
Дискретизация задатчика интенсивности
Структурная модель аналогового и цифрового ЗИ
При дискретизации ЗИ,
Дискретизация задатчика интенсивности
Структурная модель аналогового и цифрового ЗИ
При дискретизации ЗИ,
Дискретизация задатчика интенсивности
Выходные сигналы аналогового и цифрового задатчиков интенсивности
Еще
Дискретизация задатчика интенсивности
Выходные сигналы аналогового и цифрового задатчиков интенсивности
Еще
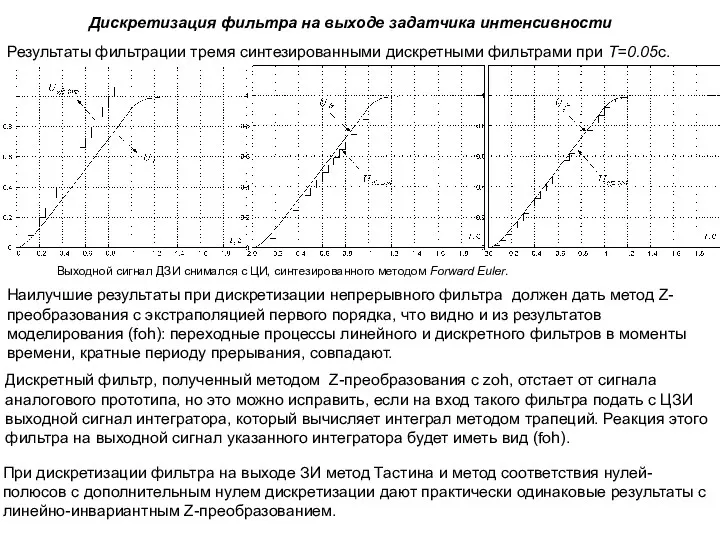
Дискретизация фильтра на выходе задатчика интенсивности
Результаты фильтрации тремя синтезированными дискретными
Дискретизация фильтра на выходе задатчика интенсивности
Результаты фильтрации тремя синтезированными дискретными
 Модернизация главного электропривода механизма подъема мостового крана грузоподъемностью 10 т склада огнеупоров ЧерМК пАО
Модернизация главного электропривода механизма подъема мостового крана грузоподъемностью 10 т склада огнеупоров ЧерМК пАО Восприятие. Виды восприятия. Свойства восприятия. Эффекты (законы) восприятия. Многообразие иллюзий
Восприятие. Виды восприятия. Свойства восприятия. Эффекты (законы) восприятия. Многообразие иллюзий Общие сведения о резании металлов. Элементы процесса резания
Общие сведения о резании металлов. Элементы процесса резания Н.И.Роговцева, Н.В.Богданова, Н.В.Добромыслова. Технология. 3 класс.Презентации к учебнику.
Н.И.Роговцева, Н.В.Богданова, Н.В.Добромыслова. Технология. 3 класс.Презентации к учебнику. Устройство автомобильных шин
Устройство автомобильных шин Медиаторы нервной системы
Медиаторы нервной системы Презентация о Великой Отечественной войне
Презентация о Великой Отечественной войне Классный час Моя малая родина 4 класс
Классный час Моя малая родина 4 класс Техника безопасности в кабинете информатики
Техника безопасности в кабинете информатики Формулировка и сопоставление заключительного клинического и патологоанатомического диагнозов
Формулировка и сопоставление заключительного клинического и патологоанатомического диагнозов Мұнай гидролизі
Мұнай гидролизі Расчет и моделирование усилителя
Расчет и моделирование усилителя Комплексные соединения
Комплексные соединения С днем учителя
С днем учителя Составление рассказа по картине Кошка с котятами
Составление рассказа по картине Кошка с котятами Автоматизация проектирования системы электроснабжения объектов различного назначения
Автоматизация проектирования системы электроснабжения объектов различного назначения Empirical Legal Research
Empirical Legal Research Характеристика угольных бассейнов России
Характеристика угольных бассейнов России Тест-игра Интервалы
Тест-игра Интервалы Voennaya_epidemiologia_1
Voennaya_epidemiologia_1 Презентация к уроку ОРКСЭ Праздники в религиях мира. Календари мира.
Презентация к уроку ОРКСЭ Праздники в религиях мира. Календари мира. ДМС для начальников
ДМС для начальников Глобальные проблемы. Основные группы проблем
Глобальные проблемы. Основные группы проблем Алфавит урок русского языка. 1 класс. УМК Планета знаний
Алфавит урок русского языка. 1 класс. УМК Планета знаний Возрастные особенности развития детей 5-6 лет
Возрастные особенности развития детей 5-6 лет Communication networks and switching systems
Communication networks and switching systems Проектная деятельность
Проектная деятельность Расчёт электрических цепей
Расчёт электрических цепей