- Устройства связи с объектом и управление задачами

Содержание
- 2. Методы и средства обработки асинхронных событий 1. Обобщенная функциональная структура информаци- онного тракта СРВ и устройства
- 3. Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом
- 4. Задачи подсистемы цифровой обработки Исходная информация для последующего анализа исследуемого явления (или объекта) формируется с помощью
- 5. Средства обработки асинхронных событий Состав средств измерений, входящих в измерительную систему и выполняющих функции датчиков сигналов,
- 6. Обоснование структуры и состава ИС Таким образом, современные средства проведения эксперимента представляют собой измерительно-вычислительные системы или
- 7. Ввод аналоговых измерительных сигналов Пример специализированной системы - многоканальный анализатор сигналов SA 3550 фирмы Brüel &
- 8. Второй подход Второй подход основан на применении дополнительных интерфейсных модулей и цифровых процессоров сигналов в составе
- 9. Целевое назначение рассматриваемых ИС Целевое назначение рассматриваемых ИС связано с регистрацией, обработкой и анализом данных физических
- 10. Связь между элементами системы Элементы системы связаны между собой на физическом и (или) логико-функциональном уровне. Ввод
- 11. Требования к ИС и ее функции Технические требования являются основными исходными данными при выборе структуры измерительной
- 12. Принципы функционирования интерфейса Существует несколько методов реализации интерфейса АЦП – процессор ПК. Схема “самых последних данных”.
- 13. Задача поиска обслуживающей программы Задача поиска обслуживающей программы иногда решается путем выполнения другой программы (программы или
- 14. Программное обеспечение интерфейса Передача через пространство основной памяти. При распределении памяти АЦП при-сваивается некоторый адрес в
- 15. Аппаратные средства интерфейса Параллельная форма представления данных. Аппаратные средства параллельного интерфейса почти всегда включают буфер с
- 16. 2. УПРАВЛЕНИЕ ЗАДАЧАМИ 1. Переключение контекста. 2. Прерывания.
- 17. Переключение контекста Контекст задачи - это набор данных, задающих состояние процессора при выполне-нии задачи. Он обычно
- 18. Переключение задач Поскольку контекст полностью определяет, какая задача будет выполняться, то часто термины «переключение задач» и
- 19. Прерывания Прерывания являются основным источником сообщения внешним устройствам о готовности данных или необходимости передачи данных. По
- 20. Механизм обработки прерываний Введите свой текст Введите свой текст Введите свой текст Установление факта и идентификация
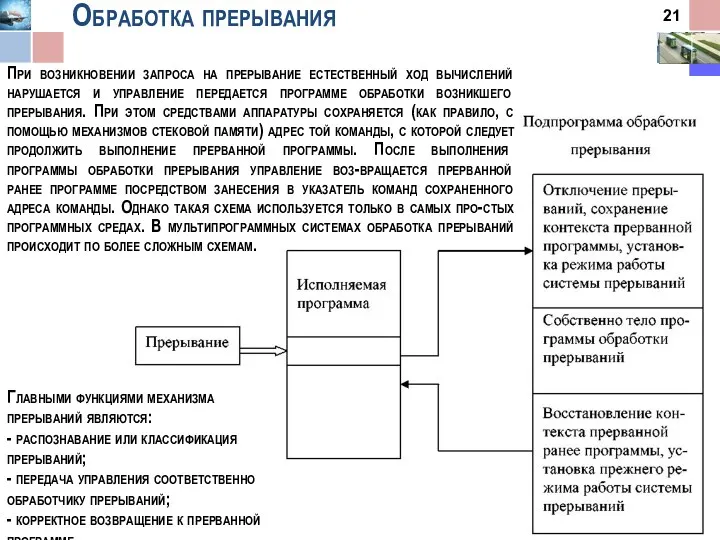
- 21. Обработка прерывания При возникновении запроса на прерывание естественный ход вычислений нарушается и управление передается программе обработки
- 22. Переход от прерываемой программы к обработчику Для корректного возвращения к прерванной программе перед передачей управления обработчику
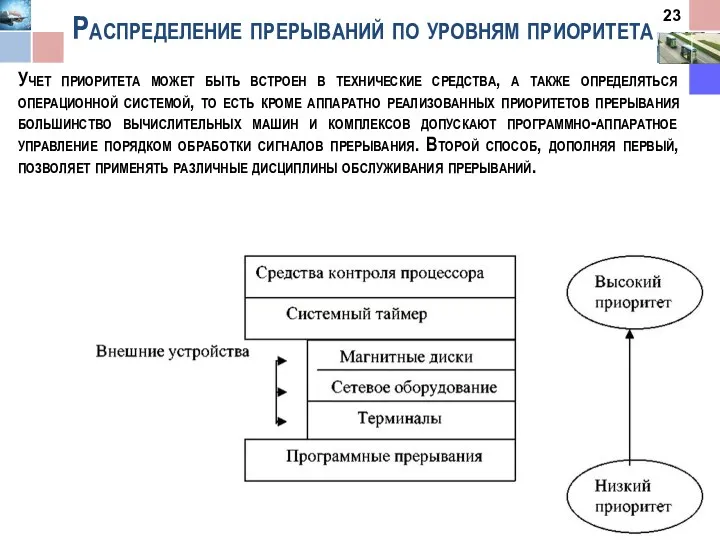
- 23. Распределение прерываний по уровням приоритета Учет приоритета может быть встроен в технические средства, а также определяться
- 24. Программное управление специальными регистрами маски Программное управление специальными регистрами маски (маскирование сигналов прерывания) позволяет реализовать различные
- 25. Супервизор прерываний В подпрограмме обработки прерывания имеются две служебные секции. В первой секции осуществляется сохранение контекста
- 26. Обработка прерывания с использованием супервизора прерываний
- 27. Обработка прерывания с использованием супервизора прерываний Супервизор прерываний, прежде всего, сохраняет в дескрипторе текущей задачи рабочие
- 29. Скачать презентацию
Методы и средства обработки асинхронных событий
1. Обобщенная функциональная структура информаци-
онного
Методы и средства обработки асинхронных событий
1. Обобщенная функциональная структура информаци- онного

Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом
Обобщенная функциональная структура информационного тракта СРВ и устройства связи с объектом
Задачи подсистемы цифровой обработки
Исходная информация для последующего анализа исследуемого явления (или
Задачи подсистемы цифровой обработки
Исходная информация для последующего анализа исследуемого явления (или
Средства обработки асинхронных событий
Состав средств измерений, входящих в измерительную систему
Средства обработки асинхронных событий
Состав средств измерений, входящих в измерительную систему
Обоснование структуры и состава ИС
Таким образом, современные средства проведения эксперимента
Обоснование структуры и состава ИС
Таким образом, современные средства проведения эксперимента
Ввод аналоговых измерительных сигналов
Пример специализированной системы - многоканальный анализатор сигналов
Ввод аналоговых измерительных сигналов
Пример специализированной системы - многоканальный анализатор сигналов
Второй подход
Второй подход основан на применении дополнительных интерфейсных модулей и цифровых
Второй подход
Второй подход основан на применении дополнительных интерфейсных модулей и цифровых

Целевое назначение рассматриваемых ИС
Целевое назначение рассматриваемых ИС связано с регистрацией,
Целевое назначение рассматриваемых ИС
Целевое назначение рассматриваемых ИС связано с регистрацией,
Связь между элементами системы
Элементы системы связаны между собой на физическом и
Связь между элементами системы
Элементы системы связаны между собой на физическом и
Требования к ИС и ее функции
Технические требования являются основными исходными данными
Требования к ИС и ее функции
Технические требования являются основными исходными данными
Принципы функционирования интерфейса
Существует несколько методов реализации интерфейса АЦП – процессор
Принципы функционирования интерфейса
Существует несколько методов реализации интерфейса АЦП – процессор
Задача поиска обслуживающей программы
Задача поиска обслуживающей программы иногда решается путем
Задача поиска обслуживающей программы
Задача поиска обслуживающей программы иногда решается путем
Программное обеспечение интерфейса
Передача через пространство основной памяти. При распределении памяти АЦП
Программное обеспечение интерфейса
Передача через пространство основной памяти. При распределении памяти АЦП
Аппаратные средства интерфейса
Параллельная форма представления данных. Аппаратные средства параллельного интерфейса почти
Аппаратные средства интерфейса
Параллельная форма представления данных. Аппаратные средства параллельного интерфейса почти
2. УПРАВЛЕНИЕ ЗАДАЧАМИ
1. Переключение контекста.
2. Прерывания.
2. УПРАВЛЕНИЕ ЗАДАЧАМИ
1. Переключение контекста.
2. Прерывания.

Переключение контекста
Контекст задачи - это набор данных, задающих состояние процессора при
Переключение контекста
Контекст задачи - это набор данных, задающих состояние процессора при
Переключение задач
Поскольку контекст полностью определяет, какая задача будет выполняться, то часто
Переключение задач
Поскольку контекст полностью определяет, какая задача будет выполняться, то часто
Прерывания
Прерывания являются основным источником сообщения внешним устройствам о готовности данных
Прерывания
Прерывания являются основным источником сообщения внешним устройствам о готовности данных
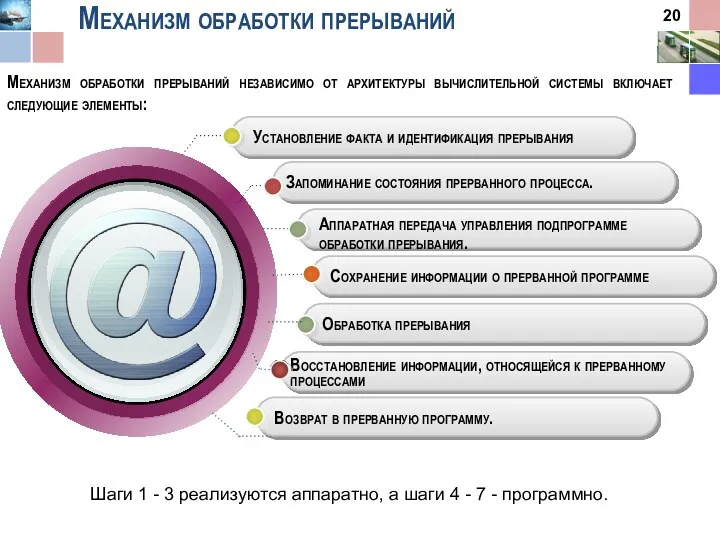
Механизм обработки прерываний
Введите свой текст
Введите свой текст
Введите свой текст
Установление факта
Механизм обработки прерываний
Введите свой текст
Введите свой текст
Введите свой текст
Установление факта
Обработка прерывания
При возникновении запроса на прерывание естественный ход вычислений нарушается
Обработка прерывания
При возникновении запроса на прерывание естественный ход вычислений нарушается
Переход от прерываемой программы к обработчику
Для корректного возвращения к прерванной программе
Переход от прерываемой программы к обработчику
Для корректного возвращения к прерванной программе
Распределение прерываний по уровням приоритета
Учет приоритета может быть встроен в технические
Распределение прерываний по уровням приоритета
Учет приоритета может быть встроен в технические
Программное управление специальными регистрами маски
Программное управление специальными регистрами маски (маскирование сигналов
Программное управление специальными регистрами маски
Программное управление специальными регистрами маски (маскирование сигналов
Супервизор прерываний
В подпрограмме обработки прерывания имеются две служебные секции. В первой
Супервизор прерываний
В подпрограмме обработки прерывания имеются две служебные секции. В первой
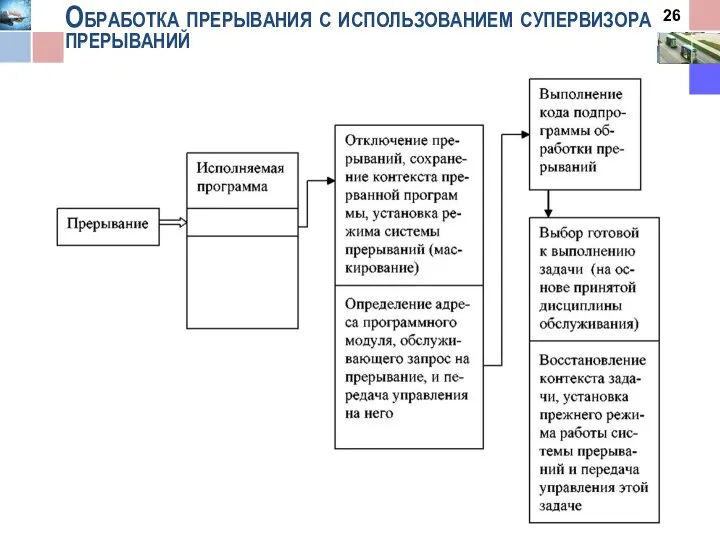
Обработка прерывания с использованием супервизора прерываний
Обработка прерывания с использованием супервизора прерываний
Обработка прерывания с использованием супервизора прерываний
Супервизор прерываний, прежде всего, сохраняет в
Обработка прерывания с использованием супервизора прерываний
Супервизор прерываний, прежде всего, сохраняет в
 Режимы работы электроэнергетических систем
Режимы работы электроэнергетических систем Современные образовательные технологии
Современные образовательные технологии Презентация Я горжусь своей фамилией
Презентация Я горжусь своей фамилией Обучающая игра для детей младшего дошкольного возраста
Обучающая игра для детей младшего дошкольного возраста Нахождение дроби от числа и числа по его дроби
Нахождение дроби от числа и числа по его дроби Агентство развития территории. Конкурс социальных проектов Молодёжная инициатива
Агентство развития территории. Конкурс социальных проектов Молодёжная инициатива Корней Чуковский Муха Цокотуха
Корней Чуковский Муха Цокотуха 5 игр на развитие познавательных процессов для детей 3-7 лет
5 игр на развитие познавательных процессов для детей 3-7 лет Проект урока географии Горные породы
Проект урока географии Горные породы Презентация к внеурочной деятельности Театр
Презентация к внеурочной деятельности Театр Мы граждане - России!!! Презентация.
Мы граждане - России!!! Презентация. Материаловедение. Классификация, маркировка, свойства и применение цветных металлов и сплавов
Материаловедение. Классификация, маркировка, свойства и применение цветных металлов и сплавов Табличный способ решения логических задач
Табличный способ решения логических задач Тренажер Словарные слова, УМК Школа России
Тренажер Словарные слова, УМК Школа России Транспортные аварии (катастрофы). Защита от последствий
Транспортные аварии (катастрофы). Защита от последствий Психостимуляторы. Общетонизирующие средства (адаптогены)
Психостимуляторы. Общетонизирующие средства (адаптогены) Подход компании Сименс к реализации цифровых сетей
Подход компании Сименс к реализации цифровых сетей Повесть Левша Николая Лескова
Повесть Левша Николая Лескова Комогоров 4б
Комогоров 4б Презентация_Разговоры_о_важных_ppt
Презентация_Разговоры_о_важных_ppt Использование различных форм контроля на уроках географии для оценивания уровня достижения метапредметных результатов обучения
Использование различных форм контроля на уроках географии для оценивания уровня достижения метапредметных результатов обучения Классификация машин для земляных работ
Классификация машин для земляных работ Свадьба для двоих у моря и скал Коктебеля. Съемка у моря
Свадьба для двоих у моря и скал Коктебеля. Съемка у моря Методика математического развития как научная область
Методика математического развития как научная область Рабочий отчет департамента аналитики компании IPO
Рабочий отчет департамента аналитики компании IPO Конструкционные материалы, применяемые при проектировании объектов топливно-энергетического комплекса
Конструкционные материалы, применяемые при проектировании объектов топливно-энергетического комплекса Проект Улица героя
Проект Улица героя Участковый принцип оказания амбулаторно-поликлинической помощи
Участковый принцип оказания амбулаторно-поликлинической помощи